Gazebo构建模型(含GNSS、IMU、LiDAR、Camera传感器)
将GNSS、IMU、LiDAR、Camera传感器和机器人的base分别放在不同的文件中。这样可以提高模型的可维护性和模块化。下面是一个示例,展示如何将这些部分分别放在不同的.xacro文件中,然后通过导入的方式组合在一起。
1. 创建基础文件:my_robot.xacro
这个文件将包含机器人的基本结构和导入其他部分的指令。
<?xml version="1.0"?>
<robot name="my_robot" xmlns:xacro="http://www.ros.org/wiki/xacro"><!-- Import base link Xacro file --><xacro:include filename="base_link.xacro"/><!-- Import GNSS sensor Xacro file --><xacro:include filename="gnss_sensor.xacro"/><!-- Import IMU sensor Xacro file --><xacro:include filename="imu_sensor.xacro"/><!-- Import LiDAR sensor Xacro file --><xacro:include filename="lidar_sensor.xacro"/><!-- Import Camera sensor Xacro file --><xacro:include filename="camera_sensor.xacro"/><!-- Instantiate sensors --><xacro:gnss_sensor parent="base_link" xyz="0.25 0 0.1" rpy="0 0 0"/><xacro:imu_sensor parent="base_link" xyz="0.25 0 0.15" rpy="0 0 0"/><xacro:lidar_sensor parent="base_link" xyz="0.25 0 0.2" rpy="0 0 0"/><xacro:camera_sensor parent="base_link" xyz="0.25 0 0.25" rpy="0 0 0"/></robot>
-
实例化传感器:
<xacro:gnss_sensor parent="base_link" xyz="0.25 0 0.1" rpy="0 0 0"/>:在base_link上实例化 GNSS 传感器,位置为x=0.25,y=0,z=0.1,姿态为r=0,p=0,y=0。<xacro:imu_sensor parent="base_link" xyz="0.25 0 0.15" rpy="0 0 0"/>:在base_link上实例化 IMU 传感器,位置为x=0.25,y=0,z=0.15,姿态为r=0,p=0,y=0。<xacro:lidar_sensor parent="base_link" xyz="0.25 0 0.2" rpy="0 0 0"/>:在base_link上实例化 LiDAR 传感器,位置为x=0.25,y=0,z=0.2,姿态为r=0,p=0,y=0。
2. 创建base_link.xacro文件
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro"><!-- Robot base link --><link name="base_link"><visual><geometry><box size="0.5 0.5 0.2"/></geometry><material name="blue"><color rgba="0 0 1 1"/></material></visual><collision><geometry><box size="0.5 0.5 0.2"/></geometry></collision><inertial><mass value="10"/><inertia ixx="1" ixy="0" ixz="0" iyy="1" iyz="0" izz="1"/></inertial></link></robot>
3. 创建gnss_sensor.xacro文件
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro"><!-- GNSS Sensor --><xacro:macro name="gnss_sensor" params="parent xyz rpy"><link name="gnss_link"><visual><geometry><box size="0.05 0.05 0.02"/></geometry><material name="green"><color rgba="0 1 0 1"/></material></visual><collision><geometry><box size="0.05 0.05 0.02"/></geometry></collision><inertial><mass value="0.1"/><inertia ixx="0.001" ixy="0" ixz="0" iyy="0.001" iyz="0" izz="0.001"/></inertial></link><joint name="gnss_joint" type="fixed"><parent link="${parent}"/><child link="gnss_link"/><origin xyz="${xyz}" rpy="${rpy}"/></joint></xacro:macro></robot>
4. 创建imu_sensor.xacro文件
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro"><!-- IMU Sensor --><xacro:macro name="imu_sensor" params="parent xyz rpy"><link name="imu_link"><visual><geometry><box size="0.05 0.05 0.02"/></geometry><material name="yellow"><color rgba="1 1 0 1"/></material></visual><collision><geometry><box size="0.05 0.05 0.02"/></geometry></collision><inertial><mass value="0.1"/><inertia ixx="0.001" ixy="0" ixz="0" iyy="0.001" iyz="0" izz="0.001"/></inertial></link><joint name="imu_joint" type="fixed"><parent link="${parent}"/><child link="imu_link"/><origin xyz="${xyz}" rpy="${rpy}"/></joint></xacro:macro></robot>
5. 创建lidar_sensor.xacro文件
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro"><!-- LiDAR Sensor --><xacro:macro name="lidar_sensor" params="parent xyz rpy"><link name="lidar_link"><visual><geometry><cylinder radius="0.05" length="0.1"/></geometry><material name="gray"><color rgba="0.5 0.5 0.5 1"/></material></visual><collision><geometry><cylinder radius="0.05" length="0.1"/></geometry></collision><inertial><mass value="0.5"/><inertia ixx="0.01" ixy="0" ixz="0" iyy="0.01" iyz="0" izz="0.01"/></inertial></link><joint name="lidar_joint" type="fixed"><parent link="${parent}"/><child link="lidar_link"/><origin xyz="${xyz}" rpy="${rpy}"/></joint></xacro:macro></robot>
6. 创建camera_sensor.xacro文件
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro"><!-- Camera Sensor --><xacro:macro name="camera_sensor" params="parent xyz rpy"><link name="camera_link"><visual><geometry><box size="0.03 0.03 0.03"/></geometry><material name="black"><color rgba="0 0 0 1"/></material></visual><collision><geometry><box size="0.03 0.03 0.03"/></geometry></collision><inertial><mass value="0.2"/><inertia ixx="0.001" ixy="0" ixz="0" iyy="0.001" iyz="0" izz="0.001"/></inertial></link><joint name="camera_joint" type="fixed"><parent link="${parent}"/><child link="camera_link"/><origin xyz="${xyz}" rpy="${rpy}"/></joint></xacro:macro></robot>
7. 将.xacro文件转换为.urdf文件
您可以使用以下命令将.xacro文件转换为.urdf文件:
rosrun xacro xacro --inorder my_robot.xacro > my_robot.urdf
8. 在Gazebo中加载模型
创建一个.world文件(例如my_world.world)并包含您的机器人模型:
<?xml version="1.0"?>
<sdf version="1.6"><world name="default"><include><uri>model://ground_plane</uri></include><include><uri>model://sun</uri></include><model name="my_robot"><include><uri>model://my_robot</uri></include></model></world>
</sdf>
然后在终端中运行:
roslaunch gazebo_ros empty_world.launch world_name:=my_world.world相关文章:
)
Gazebo构建模型(含GNSS、IMU、LiDAR、Camera传感器)
将GNSS、IMU、LiDAR、Camera传感器和机器人的base分别放在不同的文件中。这样可以提高模型的可维护性和模块化。下面是一个示例,展示如何将这些部分分别放在不同的.xacro文件中,然后通过导入的方式组合在一起。 1. 创建基础文件:my_robot.xa…...

#Js篇: 链式判断运算符 ?.和Null判断运算符 ??和逻辑赋值运算符||= = ??=
链式判断运算符 ?. ?.运算符,直接在链式调用的时候判断,左侧的对象是否为null或undefined。如果是的,就不再往下运算,而是返回undefined。 链判断运算符?.有三种写法。 obj?.prop // 对象属性是否存在 obj?.[expr] // 同上…...
IDEA敲Web前端快捷键
1.html基础格式 英文符号TAB键 <!doctype html> <html lang"en"> <head><meta charset"UTF-8"><meta name"viewport"content"widthdevice-width, user-scalableno, initial-scale1.0, maximum-scale1.0, mini…...

【Vue3】【Naive UI】<NDropdown>标签
【Vue3】【Naive UI】 标签 基本设置自定义渲染交互事件其他属性 【VUE3】【Naive UI】<NCard> 标签 【VUE3】【Naive UI】<n-button> 标签 【VUE3】【Naive UI】<a> 标签 【VUE3】【Naive UI】<…...
)
技术总结(四十一)
一、MySQL 索引概述 索引的概念:索引就好比一本书的目录,它能帮助 MySQL 快速定位到表中的数据行,而不用全表扫描。通过创建合适的索引,可以大大提高查询的效率。例如,在一个存储了大量员工信息的表中,如果…...

Android布局
一、线性布局 属性:orientation vertical horizontal layout_weight【水平均分,width"0dp"】 layout_height layout_width 小动物连连看 1<?xml version"1.0" encoding"utf-8"?>2<LinearLayout xmlns:and…...

k8s集成skywalking
如果能科学上网的话,安装应该不难,如果有问题可以给我留言 本篇文章我将给大家介绍“分布式链路追踪”的内容,对于目前大部分采用微服务架构的公司来说,分布式链路追踪都是必备的,无论它是传统微服务体系亦或是新一代…...

如何写一份优质技术文档
作者简介: 本文作者拥有区块链创新专利30,是元宇宙标准化工作组成员、香港web3标准工作组成员,参与编写《数据资产确权与交易安全评价标准》、《链接元宇宙:应用与实践》、《香港Web3.0标准化白皮书》等标准,下面提供…...

LeetCode:206.反转链表
跟着carl学算法,本系列博客仅做个人记录,建议大家都去看carl本人的博客,写的真的很好的! 代码随想录 LeetCode:206.反转链表 给你单链表的头节点 head ,请你反转链表,并返回反转后的链表。 示例…...

详解高斯消元
详解高斯消元 好东西,可以求所有一次方程组的解。 \color {red} 好东西,可以求所有一次方程组的解。 好东西,可以求所有一次方程组的解。 前置知识 一般消元法的公理: 两方程互换,解不变; 一方程乘以非零数 k k k,解不变; 一方程乘以数 k k k加上另一方程,解不变。 …...

Maven - 优雅的管理多模块应用的统一版本号
文章目录 概述一、使用 versions-maven-plugin 插件1. 在主 pom.xml 中定义插件2. 修改版本号3. 回退修改4. 提交修改 二、使用占位符统一管理版本号1. 在主 pom.xml 中定义占位符2. 使用 flatten-maven-plugin 插件自动替换占位符3. 修改版本号4. 为什么这种方式更方便&#x…...

国际网络安全趋势
1. 亲近拥抱人工智能自动化。 随着安全协调、人工智能自动化和响应(SOAR)的日益普及,人工智能自动化开始成为现实并将继续扩展到其他安全行动领域。寻求将人工智能自动化整合到原有的工具中,通过将威胁情报整合在一起,将其转换为可用格式并主…...

基于米尔全志T527开发板的FacenetPytorch人脸识别方案
本篇测评由优秀测评者“小火苗”提供。 本文将介绍基于米尔电子MYD-LT527开发板(米尔基于全志 T527开发板)的FacenetPytorch人脸识别方案测试。 一、facenet_pytorch算法实现人脸识别 深度神经网络 1.简介 Facenet-PyTorch 是一个基于 PyTorch 框架实…...

Altium Designer脚本工具定制
原理图设计自动化 ➡️Altium原理图检查工具 ➡️元器件参数集导入导出 ➡️原理图符号自动创建 ➡️原理图高级查找 ➡️原理图库文档高级查找 ➡️原理图文档对比 ➡️原理图库文档对比 PCB设计自动化 ➡️各种各样的PCB线圈自动创建 ➡️PCB文档导出成SVG格式文档…...

贝锐自研智慧网关系统OrayOS升级,适配Banana PI开发板BPI-R3 Mini
为了满足多元化的应用场景,贝锐与Banana PI携手合作,贝锐自研新一代云智慧网关系统OrayOS不仅已成功适配BPI-R3,还进一步扩展至BPI-R3 Mini,提供了更丰富的选择。在全球工业物联网、视频监控管理以及企业级办公存储等领域…...

搭建环境-PHP简介及环境搭建教程
搭建环境-PHP简介及环境搭建教程 前言 在现代Web开发中,PHP是一种广泛使用的服务器端脚本语言,它以简洁、高效和跨平台的特性受到开发者的青睐。无论是小型网站还是大型企业应用,PHP都能提供强大的支持。本文将为您详细介绍PHP的基本概念、特点,以及如何搭建PHP开发环境。…...

Maven 配置
参考学习: eclipse(或myeclipse)通过maven配置连接neo4j_eclipse 链接 neo4j-CSDN博客 爆肝十小时—我终于用Java连上Neo4j数据库 - 知乎 全站最全Maven下载安装配置教学(2024更新...全版本)建议收藏...赠送IDEA配置Ma…...

js常见函数实现
文章目录 一、数组Array1、forEach2、filter3、map4、reduce5、find6、findIndex7、includes8、join 二、对象Object1、Object.keys2、深复制 js环境中有很多工具函数,比如es6添加了很多新的属性和方法,这些方法也可以自定义实现,但是官方也提…...

点云3DHarris角点检测算法推导
先回顾2D的Harris角点检测算法推导 自相关矩阵是Harris角点检测算法的核心之一,它通过计算图像局部区域的梯度信息来描述该区域的特征。在推导Harris角点检测算法中的自相关矩阵时,我们首先需要了解自相关矩阵的基本思想和数学背景。 参考 1. 能量函数…...

mysql-binlog的三种模式
MySQL的binlog(二进制日志)有三种主要模式,分别是Statement、Row和Mixed。这三种模式在记录数据库更改的方式上有显著的区别,以下是对这三种模式的详细解释及对比: 一、Statement模式(基于SQL语句的复制&a…...

Android Wi-Fi 连接失败日志分析
1. Android wifi 关键日志总结 (1) Wi-Fi 断开 (CTRL-EVENT-DISCONNECTED reason3) 日志相关部分: 06-05 10:48:40.987 943 943 I wpa_supplicant: wlan0: CTRL-EVENT-DISCONNECTED bssid44:9b:c1:57:a8:90 reason3 locally_generated1解析: CTR…...
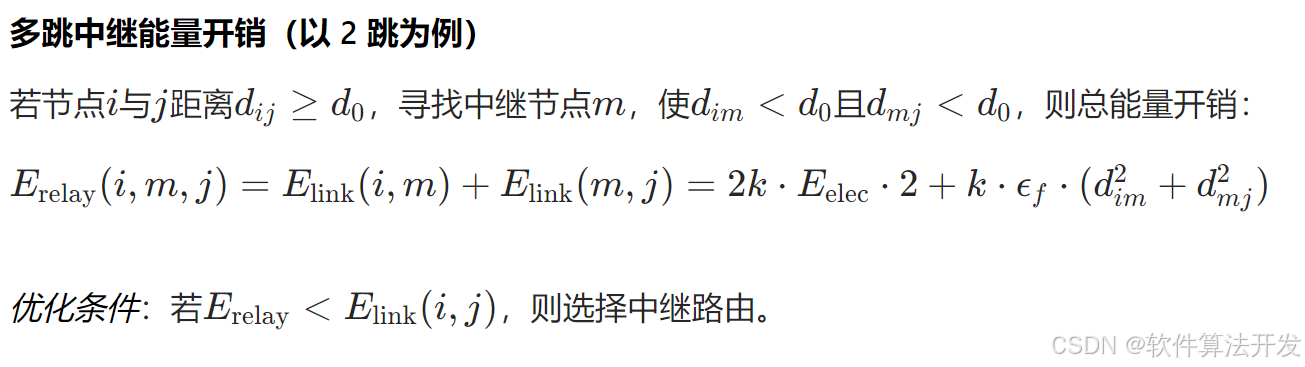
基于距离变化能量开销动态调整的WSN低功耗拓扑控制开销算法matlab仿真
目录 1.程序功能描述 2.测试软件版本以及运行结果展示 3.核心程序 4.算法仿真参数 5.算法理论概述 6.参考文献 7.完整程序 1.程序功能描述 通过动态调整节点通信的能量开销,平衡网络负载,延长WSN生命周期。具体通过建立基于距离的能量消耗模型&am…...

智慧工地云平台源码,基于微服务架构+Java+Spring Cloud +UniApp +MySql
智慧工地管理云平台系统,智慧工地全套源码,java版智慧工地源码,支持PC端、大屏端、移动端。 智慧工地聚焦建筑行业的市场需求,提供“平台网络终端”的整体解决方案,提供劳务管理、视频管理、智能监测、绿色施工、安全管…...

在rocky linux 9.5上在线安装 docker
前面是指南,后面是日志 sudo dnf config-manager --add-repo https://download.docker.com/linux/centos/docker-ce.repo sudo dnf install docker-ce docker-ce-cli containerd.io -y docker version sudo systemctl start docker sudo systemctl status docker …...

线程同步:确保多线程程序的安全与高效!
全文目录: 开篇语前序前言第一部分:线程同步的概念与问题1.1 线程同步的概念1.2 线程同步的问题1.3 线程同步的解决方案 第二部分:synchronized关键字的使用2.1 使用 synchronized修饰方法2.2 使用 synchronized修饰代码块 第三部分ÿ…...
Cilium动手实验室: 精通之旅---20.Isovalent Enterprise for Cilium: Zero Trust Visibility
Cilium动手实验室: 精通之旅---20.Isovalent Enterprise for Cilium: Zero Trust Visibility 1. 实验室环境1.1 实验室环境1.2 小测试 2. The Endor System2.1 部署应用2.2 检查现有策略 3. Cilium 策略实体3.1 创建 allow-all 网络策略3.2 在 Hubble CLI 中验证网络策略源3.3 …...
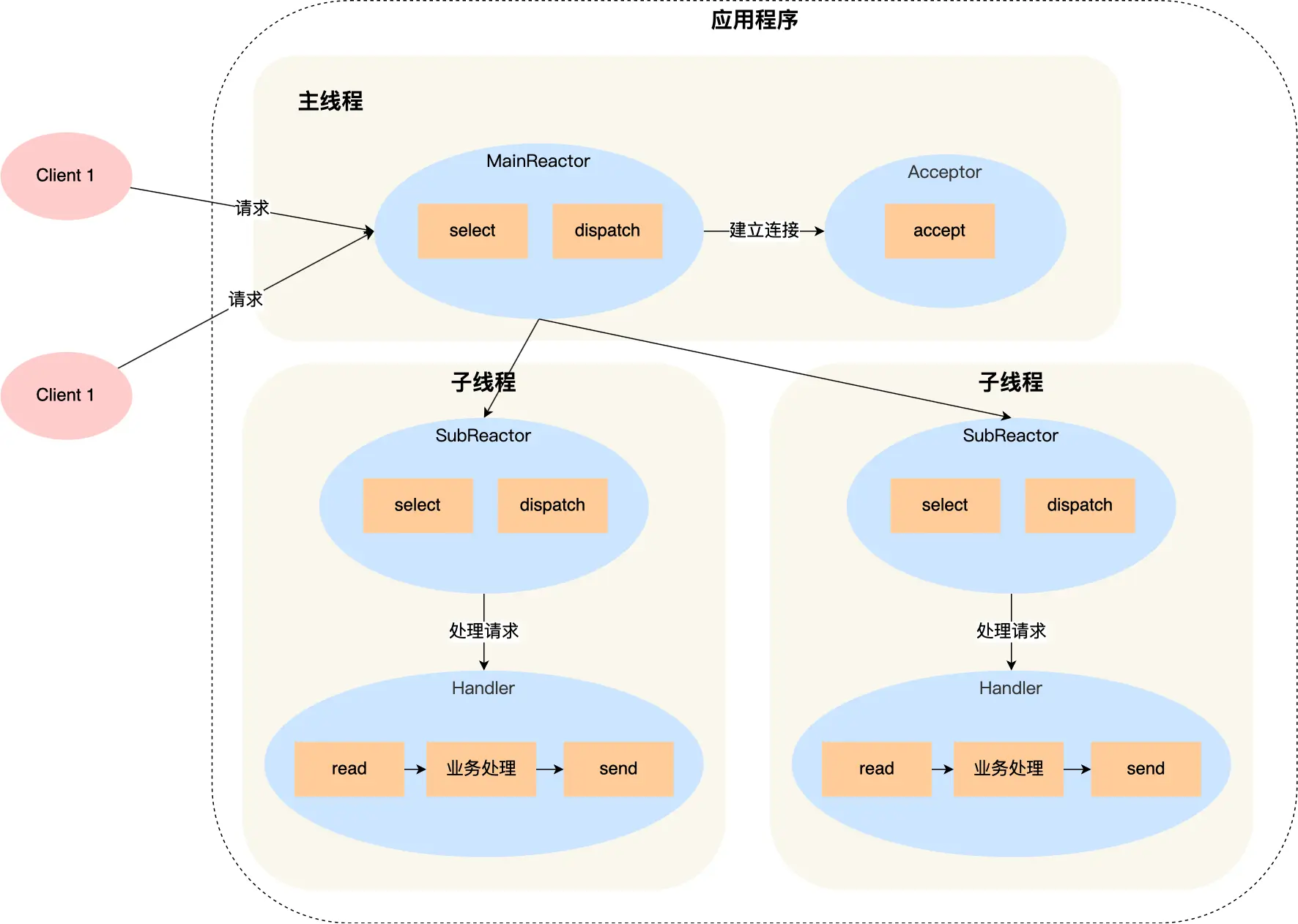
select、poll、epoll 与 Reactor 模式
在高并发网络编程领域,高效处理大量连接和 I/O 事件是系统性能的关键。select、poll、epoll 作为 I/O 多路复用技术的代表,以及基于它们实现的 Reactor 模式,为开发者提供了强大的工具。本文将深入探讨这些技术的底层原理、优缺点。 一、I…...
【开发技术】.Net使用FFmpeg视频特定帧上绘制内容
目录 一、目的 二、解决方案 2.1 什么是FFmpeg 2.2 FFmpeg主要功能 2.3 使用Xabe.FFmpeg调用FFmpeg功能 2.4 使用 FFmpeg 的 drawbox 滤镜来绘制 ROI 三、总结 一、目的 当前市场上有很多目标检测智能识别的相关算法,当前调用一个医疗行业的AI识别算法后返回…...
Reasoning over Uncertain Text by Generative Large Language Models
https://ojs.aaai.org/index.php/AAAI/article/view/34674/36829https://ojs.aaai.org/index.php/AAAI/article/view/34674/36829 1. 概述 文本中的不确定性在许多语境中传达,从日常对话到特定领域的文档(例如医学文档)(Heritage 2013;Landmark、Gulbrandsen 和 Svenevei…...
CSS | transition 和 transform的用处和区别
省流总结: transform用于变换/变形,transition是动画控制器 transform 用来对元素进行变形,常见的操作如下,它是立即生效的样式变形属性。 旋转 rotate(角度deg)、平移 translateX(像素px)、缩放 scale(倍数)、倾斜 skewX(角度…...