点云3DHarris角点检测算法推导
先回顾2D的Harris角点检测算法推导
自相关矩阵是Harris角点检测算法的核心之一,它通过计算图像局部区域的梯度信息来描述该区域的特征。在推导Harris角点检测算法中的自相关矩阵时,我们首先需要了解自相关矩阵的基本思想和数学背景。
参考
1. 能量函数的定义
在图像中,角点通常表现为局部区域内灰度值发生急剧变化的地方,因此,我们需要通过图像的梯度信息来量化图像变化的程度。为了描述图像在局部区域的变化程度,Harris角点检测算法使用了 能量函数,它度量了图像强度在局部区域内的变化。
首先,我们定义图像的梯度:
- 水平梯度 I x = ∂ I ∂ x I_x = \frac{\partial I}{\partial x} Ix=∂x∂I
- 垂直梯度 I y = ∂ I ∂ y I_y = \frac{\partial I}{\partial y} Iy=∂y∂I
然后,我们通过计算图像局部区域的强度变化,来定义 能量函数,该函数通常用梯度的平方来表示变化:
E = ∑ x , y ( ( I x ( x , y ) ) 2 + ( I y ( x , y ) ) 2 ) ⋅ w ( x , y ) E = \sum_{x, y} \left( \left( I_x(x, y) \right)^2 + \left( I_y(x, y) \right)^2 \right) \cdot w(x, y) E=x,y∑((Ix(x,y))2+(Iy(x,y))2)⋅w(x,y)
其中, w ( x , y ) w(x, y) w(x,y) 是一个权重函数,通常使用 高斯窗口 来加权周围像素,以降低远离中心点的像素对结果的影响。
2. 协方差矩阵的推导
Harris算法的核心是通过 自相关矩阵 来描述局部图像的变化程度。我们从能量函数出发,推导出协方差矩阵的定义。自相关矩阵反映了局部区域的梯度变化,通常由以下几个部分组成:
M = ( ∑ w ( x , y ) I x 2 ( x , y ) ∑ w ( x , y ) I x ( x , y ) I y ( x , y ) ∑ w ( x , y ) I x ( x , y ) I y ( x , y ) ∑ w ( x , y ) I y 2 ( x , y ) ) M = \begin{pmatrix} \sum w(x, y) I_x^2(x, y) & \sum w(x, y) I_x(x, y) I_y(x, y) \\ \sum w(x, y) I_x(x, y) I_y(x, y) & \sum w(x, y) I_y^2(x, y) \end{pmatrix} M=(∑w(x,y)Ix2(x,y)∑w(x,y)Ix(x,y)Iy(x,y)∑w(x,y)Ix(x,y)Iy(x,y)∑w(x,y)Iy2(x,y))
2.1 矩阵元素的物理意义
这个自相关矩阵是通过局部区域的梯度信息构建的,矩阵的每个元素代表图像局部区域的梯度相关信息。具体来说:
- M 11 = ∑ w ( x , y ) I x 2 ( x , y ) M_{11} = \sum w(x, y) I_x^2(x, y) M11=∑w(x,y)Ix2(x,y):表示图像在水平方向的变化强度,经过加权求和得到的值。
- M 12 = M 21 = ∑ w ( x , y ) I x ( x , y ) I y ( x , y ) M_{12} = M_{21} = \sum w(x, y) I_x(x, y) I_y(x, y) M12=M21=∑w(x,y)Ix(x,y)Iy(x,y):表示图像在两个方向上的共同变化程度,衡量了水平方向和垂直方向的梯度协方差。
- M 22 = ∑ w ( x , y ) I y 2 ( x , y ) M_{22} = \sum w(x, y) I_y^2(x, y) M22=∑w(x,y)Iy2(x,y):表示图像在垂直方向的变化强度。
这些加权求和的值构成了自相关矩阵 M M M,该矩阵包含了图像在局部区域的 梯度信息,用于描述局部特征。
2.2 局部平移不变性
图像中每个像素的梯度是局部信息的反映,而自相关矩阵 M M M 聚合了局部区域内所有像素的梯度信息。通过自相关矩阵计算的响应函数 R R R 对于平移变换具有不变性。即,如果我们平移图像的局部区域,计算出的响应函数值将不受平移影响,这使得Harris角点检测算法在不同位置的图像上都能得到一致的特征。
3. 响应函数
为了从自相关矩阵中提取角点,Harris算法定义了 响应函数 R R R,用于评估点 p i = ( x , y ) p_i = (x, y) pi=(x,y) 是否为角点。响应函数的定义如下:
R = det ( M ) − k ⋅ ( trace ( M ) ) 2 R = \text{det}(M) - k \cdot (\text{trace}(M))^2 R=det(M)−k⋅(trace(M))2
- det ( M ) \text{det}(M) det(M) 是自相关矩阵 M M M 的行列式,表示局部区域的变化程度。
- trace ( M ) \text{trace}(M) trace(M) 是自相关矩阵 M M M 的迹,表示图像梯度的总变化。
- k k k 是经验常数,通常取值在 0.04 0.04 0.04 到 0.06 0.06 0.06 之间。
通过计算 R R R 值,Harris算法可以识别出角点。当 R R R 值较大时,说明该点局部区域的变化较大,且可能是角点。
4. 行列式和迹的几何意义
自相关矩阵的行列式和迹反映了图像局部区域的不同形状特征:
- 行列式 det ( M ) \text{det}(M) det(M) 衡量的是局部区域在两个主方向上的变化程度。行列式较大表示局部区域在两个方向上都有较强的变化,通常对应于角点。
- 迹 trace ( M ) \text{trace}(M) trace(M) 衡量的是局部区域的整体变化程度。如果局部区域在两个方向上的变化程度相似,则迹值较大,可能表示图像区域较为平坦,或是边缘区域。
5. 总结
自相关矩阵 M M M 是通过计算图像梯度的加权平方和得到的,它包含了图像局部区域的梯度信息。在Harris角点检测算法中,自相关矩阵用于描述局部区域的变化,通过计算行列式和迹来定义响应函数 R R R。响应函数可以帮助我们判断某个点是否为角点。这个过程结合了局部图像区域的梯度信息,能够有效地检测出角点等图像特征。
迹的意义
在 Harris 角点检测中,trace(矩阵的迹)是自相关矩阵 M M M 的一个重要特征,它反映了图像局部区域的总体变化。具体来说,矩阵的迹是其对角线元素的和,数学上表示为:
trace ( M ) = λ 1 + λ 2 \text{trace}(M) = \lambda_1 + \lambda_2 trace(M)=λ1+λ2
其中, λ 1 \lambda_1 λ1 和 λ 2 \lambda_2 λ2 是自相关矩阵 M M M 的两个特征值。
1. 迹的几何意义
自相关矩阵 M M M 描述了图像局部区域在 x − x- x−和 y − y- y−方向上的灰度变化。特征值 λ 1 \lambda_1 λ1 和 λ 2 \lambda_2 λ2 分别表示图像在这两个方向上的变化强度。
- 迹 trace ( M ) = λ 1 + λ 2 \text{trace}(M) = \lambda_1 + \lambda_2 trace(M)=λ1+λ2 表示图像在这两个方向上的整体变化程度。它是矩阵对角线元素的和,反映了局部区域的总变化量。
2. 迹在 Harris 角点检测中的作用
在 Harris 角点检测中,响应函数 RR 是通过自相关矩阵的行列式和迹计算的,具体公式为:
R = det ( M ) − k ⋅ ( trace ( M ) ) 2 R = \text{det}(M) - k \cdot (\text{trace}(M))^2 R=det(M)−k⋅(trace(M))2
其中:
- 行列式 det ( M ) = λ 1 λ 2 \text{det}(M) = \lambda_1 \lambda_2 det(M)=λ1λ2,表示图像局部区域沿两个主方向的整体变化强度。
- 迹 trace ( M ) = λ 1 + λ 2 \text{trace}(M) = \lambda_1 + \lambda_2 trace(M)=λ1+λ2,表示图像局部区域的总变化程度。
迹的作用是提供对图像局部区域总变化的一个量化。它有以下几种作用:
2.1 描述整体变化程度
迹 trace ( M ) \text{trace}(M) trace(M) 表示局部区域在两个方向上的总变化:
- 如果迹较大,说明图像在这两个方向上的变化较强,可能是边缘或角点。
- 如果迹较小,说明图像在这两个方向上的变化较弱,可能是平坦区域。
2.2 区分角点和边缘
在 Harris 角点检测中,行列式 det ( M ) \text{det}(M) det(M) 和迹 trace ( M ) \text{trace}(M) trace(M) 共同决定了一个点是否为角点。具体来说:
- 角点:当 λ 1 \lambda_1 λ1 和 λ 2 \lambda_2 λ2 都较大时,表示图像在两个方向上都有显著变化,这时 R R R 的值较大,响应函数 R R R 也较大,通常认为该点为角点。
- 边缘:当 λ 1 \lambda_1 λ1 很大, λ 2 \lambda_2 λ2 很小(或接近零)时,表示图像在一个方向上有显著变化,而在另一个方向上变化较小。这时,尽管迹值可能不小,但由于 λ 2 \lambda_2 λ2 较小,行列式 det ( M ) \text{det}(M) det(M) 也较小,导致 R R R 较小,响应函数值较小,因此不会被认为是角点。
- 平坦区域:当 λ 1 \lambda_1 λ1 和 λ 2 \lambda_2 λ2 都较小,表示图像在两个方向上的变化都很弱,这时 trace ( M ) \text{trace}(M) trace(M) 较小,行列式 det ( M ) \text{det}(M) det(M) 也很小,响应函数值接近零,表示该点是平坦区域。
2.3 惩罚作用
在 Harris 角点检测的响应函数中,迹的平方项( k ⋅ ( trace ( M ) ) 2 k \cdot (\text{trace}(M))^2 k⋅(trace(M))2)作为一个惩罚项,用于抑制那些虽然有较大行列式(即较强的变化),但局部变化是均匀的(即沿一个方向变化而另一个方向变化很小)的区域。这个惩罚项使得响应函数值对于边缘和角点之间的差异更加敏感,从而提高角点检测的准确性。
3. 总结
- 迹(trace) 是自相关矩阵 M M M 中两个特征值的和,反映了图像局部区域在两个方向上的总体变化。
- 在 Harris 角点检测中,迹 trace ( M ) \text{trace}(M) trace(M) 反映了图像局部变化的整体程度,结合行列式 det ( M ) \text{det}(M) det(M),通过响应函数 R R R 判断一个点是否为角点。
- 通过响应函数中的迹项,可以有效区分角点、边缘和平坦区域,从而实现角点的检测。
为什么det(M)等于特征值的积
在矩阵的线性代数理论中,行列式和特征值之间有着直接的关系。具体来说,对于一个 2 × 2 2 \times 2 2×2 的矩阵 M M M,其行列式等于该矩阵的特征值的乘积。这一结论可以通过以下推导来理解。
1. 矩阵的特征值与行列式的关系
假设矩阵 M M M 是一个 2 × 2 2 \times 2 2×2 的对称矩阵(因为自相关矩阵 M M M 通常是对称矩阵):
M = [ a b b c ] M = \begin{bmatrix} a & b \\ b & c \end{bmatrix} M=[abbc]
该矩阵的特征值是矩阵的本征值(eigenvalues),我们设其特征值为 λ 1 \lambda_1 λ1 和 λ 2 \lambda_2 λ2。
为了计算特征值,需要解矩阵的特征方程:
det ( M − λ I ) = 0 \text{det}(M - \lambda I) = 0 det(M−λI)=0
其中 I I I 是单位矩阵, λ \lambda λ 是特征值。矩阵 M − λ I M - \lambda I M−λI 为:
M − λ I = [ a − λ b b c − λ ] M - \lambda I = \begin{bmatrix} a - \lambda & b \\ b & c - \lambda \end{bmatrix} M−λI=[a−λbbc−λ]
它的行列式为:
det ( M − λ I ) = ( a − λ ) ( c − λ ) − b 2 = 0 \text{det}(M - \lambda I) = (a - \lambda)(c - \lambda) - b^2 = 0 det(M−λI)=(a−λ)(c−λ)−b2=0
展开得到:
λ 2 − ( a + c ) λ + ( a c − b 2 ) = 0 \lambda^2 - (a + c)\lambda + (ac - b^2) = 0 λ2−(a+c)λ+(ac−b2)=0
这个方程的解就是 λ 1 \lambda_1 λ1 和 λ 2 \lambda_2 λ2,即矩阵 M M M 的特征值。
2. 行列式与特征值的关系
根据上面的特征方程,我们可以得到两个重要的结论:
- 特征值的和为 λ 1 + λ 2 = a + c = trace ( M ) \lambda_1 + \lambda_2 = a + c = \text{trace}(M) λ1+λ2=a+c=trace(M),即矩阵的迹(trace)等于特征值的和。
- 特征值的积为 λ 1 λ 2 = a c − b 2 = det ( M ) \lambda_1 \lambda_2 = ac - b^2 = \text{det}(M) λ1λ2=ac−b2=det(M),即矩阵的行列式(det)等于特征值的积。
3. 为什么行列式等于特征值的积
行列式 det ( M ) \text{det}(M) det(M) 是矩阵的一种不变量,它可以通过矩阵的特征值来表示。对于一个 n × n n \times n n×n 的矩阵 M M M,行列式可以写成所有特征值的积:
det ( M ) = ∏ i = 1 n λ i \text{det}(M) = \prod_{i=1}^{n} \lambda_i det(M)=i=1∏nλi
其中 λ i \lambda_i λi 是矩阵 M M M 的第 i i i 个特征值。
对于 2 × 2 2 \times 2 2×2 矩阵 M M M,其行列式就是特征值 λ 1 \lambda_1 λ1 和 λ 2 \lambda_2 λ2 的积,因此:
det ( M ) = λ 1 ⋅ λ 2 \text{det}(M) = \lambda_1 \cdot \lambda_2 det(M)=λ1⋅λ2
4. 在 Harris 角点检测中的应用
在 Harris 角点检测中,矩阵 M M M 是局部图像窗口的自相关矩阵,通常表示为:
M = [ I x 2 I x I y I x I y I y 2 ] M = \begin{bmatrix} I_x^2 & I_x I_y \\ I_x I_y & I_y^2 \end{bmatrix} M=[Ix2IxIyIxIyIy2]
其中 I x I_x Ix 和 I y I_y Iy 分别是图像在 x − x- x−和 y − y- y−方向的梯度。矩阵 M M M 的特征值 λ 1 \lambda_1 λ1 和 λ 2 \lambda_2 λ2 反映了图像局部区域在两个主方向上的变化程度:
- 行列式 det ( M ) = λ 1 ⋅ λ 2 \text{det}(M) = \lambda_1 \cdot \lambda_2 det(M)=λ1⋅λ2 反映了图像局部区域在两个方向上的整体变化强度。
- 迹 trace ( M ) = λ 1 + λ 2 \text{trace}(M) = \lambda_1 + \lambda_2 trace(M)=λ1+λ2 反映了图像局部区域的总变化程度。
因此,行列式 det ( M ) \text{det}(M) det(M) 和迹 trace ( M ) \text{trace}(M) trace(M) 是用来区分图像角点、边缘和平坦区域的重要指标。
det(M − λI) = 0怎么来的
det(M − λI) = 0 这个等式是 特征值问题 的核心,它来源于 矩阵的特征方程,用于求解矩阵的特征值。让我们从头开始推导,理解为什么需要这个方程。
1. 特征值与特征向量的定义
假设我们有一个方阵 M M M,我们想要找到这个矩阵的特征值和特征向量。根据定义,一个特征值 λ \lambda λ 和特征向量 v \mathbf{v} v 满足以下关系:
M v = λ v M \mathbf{v} = \lambda \mathbf{v} Mv=λv
这里, v \mathbf{v} v 是非零向量,称为特征向量,而 λ \lambda λ 是与之对应的特征值。
2. 转化为矩阵方程
为了从上面的方程中解出特征值 λ \lambda λ,我们首先将其改写成以下形式:
M v − λ v = 0 M \mathbf{v} - \lambda \mathbf{v} = 0 Mv−λv=0
将这个方程右边提取公共因子 v \mathbf{v} v 后,我们得到:
( M − λ I ) v = 0 (M - \lambda I) \mathbf{v} = 0 (M−λI)v=0
这里, I I I 是单位矩阵,形状与矩阵 M M M 相同,$\lambda I 表示矩阵 $ λ \lambda λ 乘以单位矩阵。这个方程表示的是一个线性方程组,我们的目标是找到 λ \lambda λ 和 v \mathbf{v} v。
3. 求解非平凡解
为了让这个方程有非平凡解(即解不为零的特征向量 v \mathbf{v} v),根据线性代数的理论,矩阵 ( M − λ I ) (M - \lambda I) (M−λI) 必须是 奇异矩阵(singular matrix)。即:
det ( M − λ I ) = 0 \text{det}(M - \lambda I) = 0 det(M−λI)=0
这里的行列式为零是因为矩阵奇异的条件是它的行列式为零。当行列式为零时,矩阵的秩下降,导致存在非零解 v \mathbf{v} v。
4. 得到特征值的特征方程
所以,求解特征值的过程就转化为求解以下方程:
det ( M − λ I ) = 0 \text{det}(M - \lambda I) = 0 det(M−λI)=0
这个方程被称为 特征方程。解这个方程得到的 λ \lambda λ 就是矩阵 M M M 的特征值。
5. 如何求解特征值
特征方程是一个关于 λ \lambda λ 的多项式方程,方程的次数等于矩阵的大小(维度)。例如,对于一个 2 × 2 2 \times 2 2×2 矩阵 M M M,特征方程是一个二次方程,解得两个特征值 λ 1 \lambda_1 λ1 和 λ 2 \lambda_2 λ2。
6. 举个例子
假设有一个 2 × 2 2 \times 2 2×2 矩阵 M M M:
M = [ a b c d ] M = \begin{bmatrix} a & b \\ c & d \end{bmatrix} M=[acbd]
为了找到它的特征值,我们构造矩阵 ( M − λ I ) (M - \lambda I) (M−λI):
M − λ I = [ a − λ b c d − λ ] M - \lambda I = \begin{bmatrix} a-\lambda & b \\ c & d-\lambda \end{bmatrix} M−λI=[a−λcbd−λ]
然后,计算行列式:
det ( M − λ I ) = ( a − λ ) ( d − λ ) − b c \text{det}(M - \lambda I) = (a-\lambda)(d-\lambda) - bc det(M−λI)=(a−λ)(d−λ)−bc
展开后得到:
det ( M − λ I ) = λ 2 − ( a + d ) λ + ( a d − b c ) \text{det}(M - \lambda I) = \lambda^2 - (a+d)\lambda + (ad - bc) det(M−λI)=λ2−(a+d)λ+(ad−bc)
这就是矩阵 M M M 的特征方程。解这个方程可以得到 λ 1 \lambda_1 λ1 和 λ 2 \lambda_2 λ2,即矩阵的特征值。
7. 总结
特征值方程 det(M − λI) = 0 是从特征向量的定义出发推导出来的,目的是为了找出使得矩阵 M M M 在作用于特征向量时仅引起缩放而不改变方向的标量 λ \lambda λ,即特征值。通过解这个方程,我们可以得到矩阵的特征值,从而深入了解矩阵的性质。
奇异矩阵(Singular Matrix)
一个矩阵是 奇异矩阵,如果它不具有 逆矩阵。换句话说,一个矩阵 A A A 是奇异的,如果不存在一个矩阵 B B B,使得:
A ⋅ B = I A \cdot B = I A⋅B=I
其中 I I I 是单位矩阵。简单来说,奇异矩阵是“无法反转”的矩阵。
奇异矩阵的几个特征
-
行列式为零: 奇异矩阵的一个最基本的特征是它的行列式(determinant)为零:
det ( A ) = 0 \text{det}(A) = 0 det(A)=0
行列式为零意味着矩阵在某些方面“退化”了,这也表示它的列向量(或行向量)是线性相关的。也就是说,矩阵的列或行之间存在线性依赖关系,无法形成一个完整的线性空间。 -
不可逆: 奇异矩阵无法求逆。对于一个方阵 A A A,如果它是奇异的,那么它就没有逆矩阵。只有行列式非零的矩阵才有逆矩阵。对于奇异矩阵来说,计算其逆矩阵会导致错误或不定义。
-
线性依赖: 如果矩阵 A A A 的行或列是线性相关的,即矩阵的某一行或某一列可以表示为其他行或列的线性组合,那么这个矩阵就是奇异矩阵。
-
秩小于矩阵的维度: 奇异矩阵的秩小于矩阵的维度。秩是一个矩阵的重要性质,表示矩阵列向量(或行向量)中线性无关的最大数目。如果矩阵的秩小于其维度(比如 n × n n \times n n×n 矩阵的秩小于 n n n),那么该矩阵就是奇异的。
直观解释
可以通过一个简单的二维矩阵来理解奇异矩阵。例如,考虑下面的 2 × 2 2 \times 2 2×2 矩阵:
A = [ 1 2 2 4 ] A = \begin{bmatrix} 1 & 2 \\ 2 & 4 \end{bmatrix} A=[1224]
在这个矩阵中,第二行是第一行的两倍,因此它们是线性相关的。我们可以看到,这个矩阵的行列式为零:
det ( A ) = 1 × 4 − 2 × 2 = 0 \text{det}(A) = 1 \times 4 - 2 \times 2 = 0 det(A)=1×4−2×2=0
因为行列式为零,矩阵是奇异的,表示它无法反转。在几何意义上,这个矩阵表示一个缩放变换,其中两条线(列向量)落在了同一条直线上,导致它们无法提供完整的二维空间的基。
奇异矩阵的数学背景
考虑矩阵的特征值与特征向量问题,如果矩阵 A A A 是奇异的,那么它的行列式为零,意味着矩阵的某些特征值是零。特征值为零的矩阵无法被逆转(因为零不能作为逆的因子)。
在实际应用中,奇异矩阵常常表示数据丢失或线性相关性,可能会导致计算中的不稳定性。比如,在求解线性方程组时,如果矩阵是奇异的,可能没有唯一解。
如何判断一个矩阵是否奇异
- 计算矩阵的行列式。如果行列式为零,则矩阵是奇异的。
- 如果矩阵的秩小于它的行或列数,那么它也是奇异的。
- 对于矩阵的特征值,若存在特征值为零的情况,则矩阵是奇异的。
举例:奇异矩阵与非奇异矩阵
非奇异矩阵
例如,考虑下面的矩阵:
B = [ 2 1 1 2 ] B = \begin{bmatrix} 2 & 1 \\ 1 & 2 \end{bmatrix} B=[2112]
计算它的行列式:
det ( B ) = 2 × 2 − 1 × 1 = 4 − 1 = 3 \text{det}(B) = 2 \times 2 - 1 \times 1 = 4 - 1 = 3 det(B)=2×2−1×1=4−1=3
由于行列式不为零,矩阵 B B B 是非奇异的,存在逆矩阵。
奇异矩阵
再看一个例子:
C = [ 1 2 2 4 ] C = \begin{bmatrix} 1 & 2 \\ 2 & 4 \end{bmatrix} C=[1224]
计算它的行列式:
det ( C ) = 1 × 4 − 2 × 2 = 4 − 4 = 0 \text{det}(C) = 1 \times 4 - 2 \times 2 = 4 - 4 = 0 det(C)=1×4−2×2=4−4=0
由于行列式为零,矩阵 C C C 是奇异矩阵,不能求逆。
总结
奇异矩阵是指没有逆矩阵的矩阵,它的行列式为零,矩阵的行或列是线性相关的,导致秩小于矩阵的维度。奇异矩阵通常用于表示一些在几何或物理模型中无法逆转的情况。
Harris 3D 关键点检测算法的数学推导
Harris 3D 算法是基于 Harris 角点检测 的思想扩展到 三维点云数据 上的。其基本思想是通过分析点云局部表面的变化,来寻找点云中显著的特征点(即关键点),通常用于在点云配准、三维重建等任务中提取关键特征。
Harris 3D 关键点检测的数学推导和过程通常包括以下几个步骤:
1. 局部点云表面估计:
对于三维点云中的每个点 p i p_i pi,我们首先计算其 局部邻域,这个邻域是由点 p i p_i pi 周围一定范围内的点组成,通常使用 K-D树 或其他方式来搜索这些邻域点。
然后,我们使用 主成分分析(PCA) 来估计该点的 局部法线 和 曲率,这些信息能够反映局部表面的几何特征。
具体步骤如下:
- 对于点 p i p_i pi,通过其邻域点 N ( p i ) \mathcal{N}(p_i) N(pi) 来计算局部点云的 协方差矩阵 M M M。
- 协方差矩阵 M M M 是通过对邻域内每个点相对于 p i p_i pi 的位置进行偏差(即差值)求和得到的。
2. 协方差矩阵的计算:
协方差矩阵 M M M 用于描述点云局部的几何形态。假设我们已经得到邻域点集 N ( p i ) = { p 1 , p 2 , … , p n } \mathcal{N}(p_i) = \{ p_1, p_2, \dots, p_n \} N(pi)={p1,p2,…,pn},则协方差矩阵的计算公式为:
M = 1 ∣ N ( p i ) ∣ ∑ j ∈ N ( p i ) ( p j − p i ˉ ) ( p j − p i ˉ ) T M = \frac{1}{|\mathcal{N}(p_i)|} \sum_{j \in \mathcal{N}(p_i)} (p_j - \bar{p_i}) (p_j - \bar{p_i})^T M=∣N(pi)∣1j∈N(pi)∑(pj−piˉ)(pj−piˉ)T
其中, p i ˉ \bar{p_i} piˉ 是点 p i p_i pi 的邻域质心:
p i ˉ = 1 ∣ N ( p i ) ∣ ∑ j ∈ N ( p i ) p j \bar{p_i} = \frac{1}{|\mathcal{N}(p_i)|} \sum_{j \in \mathcal{N}(p_i)} p_j piˉ=∣N(pi)∣1j∈N(pi)∑pj
协方差矩阵 M M M 是一个 3 × 3 3 \times 3 3×3 矩阵,它的特征值反映了该点邻域内的 局部变化 情况。具体来说:
- 特征值 λ 1 , λ 2 , λ 3 \lambda_1, \lambda_2, \lambda_3 λ1,λ2,λ3 描述了点云在各个主方向上的变化程度(即局部的变异程度)。其中 λ 1 \lambda_1 λ1 是最大的特征值,对应主方向, λ 2 \lambda_2 λ2 和 λ 3 \lambda_3 λ3 分别是次主方向和最小主方向的特征值。
对于点云中的每一个点 p i p_i pi,我们通过其邻域点 $\mathcal{N}(p_i) $计算出协方差矩阵 M M M。协方差矩阵反映了该点周围局部表面的几何特性,它是通过对该点邻域的点进行 PCA(主成分分析)来估计的。
协方差矩阵 M M M 通常是一个 3 × 3 3 \times 3 3×3 的矩阵,描述了点云局部区域的三维几何形态。协方差矩阵的特征值 λ 1 , λ 2 , λ 3 \lambda_1, \lambda_2, \lambda_3 λ1,λ2,λ3 反映了点云在各个主方向上的变化程度。
3. 响应函数的计算:
Harris 3D 关键点检测的核心在于计算 响应函数 R R R,用来评估点 p i p_i pi 是否为一个关键点。这个响应函数通常与 协方差矩阵 的行列式和迹(trace)相关,公式为:
R = det ( M ) − k ⋅ ( trace ( M ) ) 2 R = \det(M) - k \cdot (\text{trace}(M))^2 R=det(M)−k⋅(trace(M))2
其中:
-
det ( M ) \det(M) det(M) 是矩阵 M M M 的行列式,反映了局部表面的 体积 变化,表明点云局部区域的变化程度。
-
trace ( M ) \text{trace}(M) trace(M) 是协方差矩阵的迹,即三个特征值的和,反映了局部表面变化的 总变异。
-
k k k 是常数,通常取值在 [0.04,0.06][0.04, 0.06] 之间,用于控制响应函数的敏感度。
-
行列式 det ( M ) \det(M) det(M):反映了协方差矩阵的 体积,即局部点云区域的空间分布。行列式越大,意味着局部区域的几何变化越大,点云在局部区域内的分布更为分散。
-
迹 trace ( M ) \text{trace}(M) trace(M):是协方差矩阵的对角线元素之和,反映了点云在各个方向上的总体变化程度。简单来说,迹是特征值的和:
trace ( M ) = λ 1 + λ 2 + λ 3 \text{trace}(M) = \lambda_1 + \lambda_2 + \lambda_3 trace(M)=λ1+λ2+λ3
迹越大,意味着局部点云区域的整体变化越显著。
4. 响应函数的解释:
- 如果 R R R 的值较大,意味着点 p i p_i pi 周围的表面变化非常显著(即有一个 显著的曲率变化)。这种点通常位于 边缘 或 角点 等重要的几何特征处。
- 如果 R R R 的值接近于零,意味着点 p i p_i pi 周围的表面几乎是平坦的,没有显著的几何变化。
5. 最大值抑制(Non-Maximum Suppression):
为了确保关键点是局部极值点,Harris 3D 会使用 最大值抑制 方法,在点云的邻域中抑制掉非极值点,只保留响应值 R R R 最大的点作为关键点。
6. 关键点的筛选:
通过计算响应函数 R R R,我们可以得到每个点的显著性值。根据一个设定的阈值,筛选出关键点:
- 如果 Threshold \text{Threshold} Threshold,则该点 p i p_i pi 被认为是一个关键点。
此外,通常还会使用 非最大抑制 来进一步去除那些在局部邻域内不具备最大响应的点。
总结:Harris 3D 关键点检测算法的数学推导过程
- 局部点云估计:对点 p i p_i pi 的邻域进行 PCA,计算协方差矩阵 M M M。
- 协方差矩阵的特征值:计算协方差矩阵 M M M 的特征值 λ 1 , λ 2 , λ 3 \lambda_1, \lambda_2, \lambda_3 λ1,λ2,λ3,用于描述局部表面的变化。
- 计算响应函数:基于特征值计算响应函数 R R R。
- 最大值抑制:通过非最大抑制来筛选出局部极值点。
- 关键点筛选:通过设定阈值来选择最终的关键点。
该算法通过分析点云的 局部表面变化 和 曲率,能够有效地提取出点云中的 角点 和 边缘点,适用于在三维重建、点云配准等任务中的关键点提取。
Harris 3D 关键点检测的核心在于计算 响应函数 RR,用来评估点 pip_i 是否为一个关键点。这个响应函数反映了点云局部表面变化的显著性,通常与 协方差矩阵 MM 的行列式 det(M)\det(M) 和迹(trace) trace(M)\text{trace}(M) 相关。
行列式和秩
行列式和秩是线性代数中两个非常重要的概念,它们在数学和工程中具有广泛的应用。它们不仅描述了矩阵本身的性质,还在解方程、特征值问题、几何学、图像处理等领域中起着重要作用。下面是对这两个概念的详细解释和它们的实际意义:
1. 行列式 (Determinant)
行列式是一个数值,表示矩阵在某些变换下的伸缩因子,反映了矩阵的“规模”或“体积”变化。行列式通常仅定义于方阵,即行数和列数相等的矩阵。
行列式的定义:
对于一个 n × n n \times n n×n 的方阵 A = [ a i j ] A = [a_{ij}] A=[aij],行列式记作 det ( A ) \det(A) det(A) 或 ∣ A ∣ |A| ∣A∣,它是通过递归的方式计算的。对一个 $2 \times 2 $矩阵:
A = [ a b c d ] , det ( A ) = a d − b c A = \begin{bmatrix} a & b \\ c & d \end{bmatrix}, \quad \det(A) = ad - bc A=[acbd],det(A)=ad−bc
对于更高维的矩阵,行列式的计算则涉及到展开式。
行列式的几何意义:
行列式可以用来度量由矩阵表示的线性变换对空间体积的改变。对于一个方阵 A A A:
- 行列式的绝对值 ∣ det ( A ) ∣ |\det(A)| ∣det(A)∣ 表示矩阵对应的线性变换对单位体积的 扩展 或 缩放。例如,二维矩阵的行列式 ∣ det ( A ) ∣ |\det(A)| ∣det(A)∣ 表示通过该变换后的单位平行四边形的面积,三维矩阵的行列式 $|\det(A)| $表示变换后的单位立方体的体积。
- 行列式的符号:如果 det ( A ) > 0 \det(A) > 0 det(A)>0,表示该线性变换没有改变空间的方向(例如,旋转或缩放);如果 det ( A ) < 0 \det(A) < 0 det(A)<0,则表示空间的方向发生了反转(例如,镜像反射)。
行列式的实际意义:
- 矩阵是否可逆:行列式是判断矩阵是否可逆的重要工具。如果 det ( A ) = 0 \det(A) = 0 det(A)=0,矩阵 A A A 不可逆,即矩阵的列(或行)线性相关,表示矩阵在某些变换下将空间压缩到低维度。反之,如果 det ( A ) ≠ 0 \det(A) \neq 0 det(A)=0,则矩阵是可逆的。
- 求解线性方程组:行列式可以用来判断线性方程组是否有唯一解。如果系数矩阵的行列式为零,方程组可能没有解或有无穷多解。
- 变换后的几何体积:在计算几何中,行列式可以用来计算空间变换(如旋转、缩放、剪切)对几何体积的影响。
2. 秩 (Rank)
秩是矩阵的一个重要概念,它描述了矩阵的线性独立性和有效维度。矩阵的秩反映了矩阵中行或列的最大线性独立数目。
秩的定义:
对于一个 m × n m \times n m×n 的矩阵 A A A,其秩 rank ( A ) \text{rank}(A) rank(A) 是矩阵中线性无关的行(或列)的最大数量。秩有以下几种定义方式:
- 行秩:矩阵中最大数量的线性无关的行。
- 列秩:矩阵中最大数量的线性无关的列。
根据 秩-零化定理,对于任意矩阵,其行秩等于列秩。
秩的几何意义:
秩可以看作是矩阵在空间中所能“张成”的最大维度:
- 秩为 0:矩阵的所有行和列都是线性相关的,表示矩阵将整个空间压缩到一个点(或一条直线)。
- 秩为 1:矩阵的行或列之间有一定的线性关系,但它们可以张成一条直线。
- 秩为 2:矩阵的行或列可以张成一个平面。
- 秩为 3:矩阵的行或列可以张成整个三维空间。
秩的实际意义:
- 线性独立性:矩阵的秩反映了其列或行向量的线性独立性。如果矩阵的秩等于矩阵的列数(对于列满秩矩阵),那么矩阵的列是线性无关的,反之则存在线性相关的列。
- 可逆性:如果矩阵是 n × n n \times n n×n 的方阵,且秩为 n n n,则矩阵是可逆的。
- 矩阵的降维性:秩可以用来衡量矩阵数据的有效维度。在机器学习和信号处理中,秩常常与降维(例如,PCA、SVD等)相关,秩较小的矩阵表示数据的有效维度较低。
- 解线性方程组:秩也可以用来判断线性方程组的解的个数。如果系数矩阵的秩小于方程组的未知数个数,方程组将有无穷多解;如果秩等于未知数的个数且等于增广矩阵的秩,则方程组有唯一解。
3. 行列式和秩的关系
- 行列式和秩在判断矩阵是否可逆方面密切相关:
- 如果矩阵的秩等于矩阵的行数(对于方阵),则行列式非零,矩阵可逆。
- 如果矩阵的秩小于行数(对于方阵),则行列式为零,矩阵不可逆。
总结
- 行列式反映了矩阵变换的规模和方向性,特别是对几何体积和变换的影响。如果行列式为零,矩阵是奇异的,表示空间被压缩至低维。
- 秩反映了矩阵的线性独立性和它在空间中张成的有效维度。秩为零表示没有有效维度,秩为最大值则表示矩阵完全张成空间。
这两个概念在许多实际问题中都非常重要,尤其在数据分析、信号处理、优化、计算几何等领域有着广泛的应用。
代码
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
// 包含相关头文件
#include <pcl/keypoints/harris_3d.h>
#include "resolution.h" // 用于计算模型分辨率
typedef pcl::PointXYZ PointT;
int main(int argc, char** argv)
{// 读取点云pcl::PointCloud<PointT>::Ptr cloud(new pcl::PointCloud<PointT>);pcl::io::loadPCDFile(argv[1], *cloud);std::cout << "original cloud size : " << cloud->size() << std::endl;double resolution = computeCloudResolution(cloud);pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>());pcl::HarrisKeypoint3D<PointT, pcl::PointXYZI> detector;pcl::PointCloud<pcl::PointXYZI>::Ptr keypoints_temp(new pcl::PointCloud<pcl::PointXYZI>);detector.setNonMaxSupression(true);detector.setRadiusSearch(10 * resolution);detector.setThreshold(1E-6);detector.setSearchMethod(tree); // 不写也可以,默认构建kdtreedetector.setInputCloud(cloud);detector.compute(*keypoints_temp);pcl::console::print_highlight("Detected %d points !\n", keypoints_temp->size());pcl::PointCloud<PointT>::Ptr keys(new pcl::PointCloud<pcl::PointXYZ>);pcl::copyPointCloud(*keypoints_temp, *keys);system("pause");return 0;
}
你提供的代码实现了一个 Harris 3D 关键点检测 的功能,它是基于 PCL(Point Cloud Library)库的。这个代码的作用是从点云数据中检测关键点,通常用于点云的特征提取、配准或者其他三维处理任务。让我详细解析一下代码中的每个关键部分及其作用。
代码解析:
1. 读取点云数据:
pcl::PointCloud<PointT>::Ptr cloud(new pcl::PointCloud<PointT>);
pcl::io::loadPCDFile(argv[1], *cloud);
std::cout << "original cloud size : " << cloud->size() << std::endl;
- 这部分代码使用 PCL 库的
pcl::io::loadPCDFile函数从 PCD 文件(点云文件格式)加载数据,并将其存储在cloud变量中。 PointT是点云数据类型,pcl::PointXYZ表示三维坐标的点(x, y, z)。- 读取点云之后,输出原始点云的大小。
2. 计算模型分辨率:
double resolution = computeCloudResolution(cloud);
- 这行代码计算了点云的分辨率,
computeCloudResolution是一个外部函数,可能根据点云的稀疏程度或其他特性来计算。
3. 初始化 Kd-Tree:
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>());
- 使用 Kd-Tree 结构作为邻域搜索的基础。Kd-Tree 是一种高效的数据结构,用于在点云中寻找最近邻点。
4. 初始化 Harris 3D 关键点检测器:
pcl::HarrisKeypoint3D<PointT, pcl::PointXYZI> detector;
HarrisKeypoint3D是 PCL 库中实现的三维 Harris 关键点检测算法。它用于检测点云中显著的几何变化点(如角点或边缘点)。
5. 设置 Harris 3D 关键点检测的参数:
detector.setNonMaxSupression(true); // 启用非极大值抑制
detector.setRadiusSearch(10 * resolution); // 搜索半径,取决于点云分辨率
detector.setThreshold(1E-6); // 阈值,用于控制检测到的关键点的显著性
detector.setSearchMethod(tree); // 使用之前构建的 KdTree 进行邻域搜索
detector.setInputCloud(cloud); // 输入点云数据
setNonMaxSupression(true):启用非极大值抑制,确保关键点是局部区域中最显著的点。setRadiusSearch(10 * resolution):设置邻域搜索的半径为10 * resolution,这是与点云分辨率相关的一个参数。setThreshold(1E-6):设置关键点检测的阈值。小的阈值通常表示只有显著的变异区域才会被检测为关键点。setSearchMethod(tree):指定使用 Kd-Tree 进行邻域查询,以加速搜索过程。setInputCloud(cloud):将输入的点云数据传递给检测器。
6. 计算关键点:
pcl::PointCloud<pcl::PointXYZI>::Ptr keypoints_temp(new pcl::PointCloud<pcl::PointXYZI>);
detector.compute(*keypoints_temp);
- 这行代码执行 Harris 3D 关键点检测,
compute方法会计算关键点并将结果存储到keypoints_temp中。
7. 输出检测结果:
pcl::console::print_highlight("Detected %d points !\n", keypoints_temp->size());
- 输出检测到的关键点的数量。
8. 转换和存储关键点:
pcl::PointCloud<PointT>::Ptr keys(new pcl::PointCloud<pcl::PointXYZ>);
pcl::copyPointCloud(*keypoints_temp, *keys);
- 将
keypoints_temp中的pcl::PointXYZI类型的关键点云转换为pcl::PointXYZ类型,后者只包含位置数据(不含强度信息)。 - 将结果存储到
keys中。
9. 程序暂停:
system("pause");
- 程序会在此处暂停,通常是为了调试时查看输出结果。
主要算法原理:
Harris 3D 关键点检测算法是基于 Harris 角点检测 方法的一种三维扩展。其主要思想是利用点云局部区域的 变化率 来检测关键点:
- 对每个点,考虑其周围邻域的几何形状。
- 计算该邻域的协方差矩阵,通过矩阵的特征值来描述局部结构的变化情况。
- 通过特征值来判断点的显著性,特征值较大时表示该点周围的结构变化明显,通常是角点、边缘点或其他关键点。
- 非极大值抑制用于去除周围的冗余点,确保保留最显著的关键点。
适用场景:
- 特征提取:可以用于点云配准、物体识别、三维重建等任务。
- 关键点检测:有效地识别点云中的显著几何特征点(如角点、边缘点等)。
总结:
这段代码实现了基于 Harris 3D 方法的点云关键点检测功能,通过计算点云的局部几何特性,识别出在空间中变化显著的点,为后续的点云处理任务提供基础特征。
相关文章:

点云3DHarris角点检测算法推导
先回顾2D的Harris角点检测算法推导 自相关矩阵是Harris角点检测算法的核心之一,它通过计算图像局部区域的梯度信息来描述该区域的特征。在推导Harris角点检测算法中的自相关矩阵时,我们首先需要了解自相关矩阵的基本思想和数学背景。 参考 1. 能量函数…...

mysql-binlog的三种模式
MySQL的binlog(二进制日志)有三种主要模式,分别是Statement、Row和Mixed。这三种模式在记录数据库更改的方式上有显著的区别,以下是对这三种模式的详细解释及对比: 一、Statement模式(基于SQL语句的复制&a…...
;右值引用和移动语义)
自动类型推导(auto 和 decltype);右值引用和移动语义
1) 自动类型推导(auto 和 decltype) 自动类型推导(auto) 在C11及以后的版本中,auto关键字被引入用于自动类型推导。这意味着编译器会自动推断变量的类型,基于其初始化的表达式。使用auto可以让代码更加简…...
进程控制)
(Linux 系统)进程控制
目录 一、进程创建 1、fork函数初识 二、进程终止 1、正常终止 2、异常终止 三、进程等待 1、进程等待必要性 2、进程等待的方法: 四、获取子进程status 1、基本概念 2、进程的阻塞等待方式 3、进程的非阻塞等待方式 五、进程程序替换 1、六种替换函数…...

【Nativeshell】flutter的pc跨平台框架学习记录<二> 窗口间通信
首先是初始化: 查看Nativeshell的demo代码 // ignore_for_file: undefined_hidden_name, // not in main import package:flutter/material.dart hide MenuItem; import package:nativeshell/nativeshell.dart;import pages/other_window.dart; import pages/plat…...

今日codeforces刷题(1)
一、前言 新栏目,每隔几天就保质保量地刷个10道codeforces题左右的样子 筛选1200-1500难度的题,然后按通过题目的人数降序排列的前10题 二、题目总览 三、具体题目 3.1 25A. IQ test 我的代码 看奇数出现的次数为1还是偶数出现的次数为1,…...

【C++算法】20.二分查找算法_x 的平方根
文章目录 题目链接:题目描述:解法C 算法代码:图解 题目链接: 69. x 的平方根 题目描述: 解法 暴力解法: 如果x17 从1,2,3,4,5......这些数里面找他们的平方…...

图像显示的是矩阵的行和列,修改为坐标范围。
x 3; y 3; f1x x^2 y^2; guance1 f1x; F (x, y) sqrt((x.^2 y.^2 - guance1).^2); % 使用点乘 [x, y] meshgrid(0:1:5, 0:1:5); Z F(x, y); figure; imagesc(Z); % 由于 imagesc 使用矩阵索引作为坐标,我们需要手动添加刻度 % 这里我们假设 x 和 y 的范围…...

通义灵码走进北京大学创新课堂丨阿里云云原生 10 月产品月报
云原生月度动态 云原生是企业数字创新的最短路径。 《阿里云云原生每月动态》,从趋势热点、产品新功能、服务客户、开源与开发者动态等方面,为企业提供数字化的路径与指南。 趋势热点 🥇 通义灵码走进北京大学创新课堂,与 400…...

LeetCode Hot100 1~10
目录 哈希1. 两数之和2. 字母异位词分组3. 最长连续子序列 双指针4. 移动零5. 盛最多水的容器6. 三数之和7. 接雨水 子串8. 无重复字符的最长子串9. 找到字符中所有字母的异位词10. 和为K的子数组 哈希 1. 两数之和 利用哈希表找出当前数字还差多少 看看差值时候在哈希表中即…...
)
npm 最新国内淘宝镜像地址源 (旧版已不能用)
注意:原域名https://registry.npm.taobao.org/ 在 2022.06.30 号正式下线和停止 DNS 解析 最新地址: #最新地址 淘宝 NPM 镜像站喊你切换新域名啦! npm config set registry https://registry.npmmirror.com 查看镜像使用状态 npm config get registr…...

DepthAI 2.29版本 发布
2024年11月29日 增加在设备运行时使用新的 dai::Device.setCalibration() 更改设备校准能力的方法,并使用 dai::Device.getCalibration() 进行检索校准 1🍃 新的立体深度预设属性: 预设 面部 高细节 机器人 2🍃 多项摄像…...
中有错误)
C#反序列化XML时提示XML 文档(1, 1)中有错误
最近在反序列化一个XML时,遇到了如下报错: XML 文档(1, 1)中有错误。 内部异常 XmlException: 根级别上的数据无效。 第 1 行,位置 1。 看描述应该是XML格式的问题,我把XML复制到新建的控制台程序,反序列化又是可以的…...

C# 中的接口:定义行为契约与实现多态性
C#中的接口(Interfaces)。接口是C#中一个非常重要的特性,它允许定义类型的行为契约,而不指定具体实现。通过接口,可以实现多态性、代码的灵活性和可扩展性。以下是一篇关于C#中接口的文章。 引言 接口(Int…...

Redis的基础知识·
Redis是一个基于内存的key-value的结构数据库 基于内存存储 读写性能高适合存储热点数据(热点商品 咨询 新闻) 开启Redis 首先输入命令 redis-server.exe redis.windows.conf 然后重新打开命令行窗口 输入命令 redis-cli.exe 输入密码 …...

qt QProxyStyle详解
1、概述 QProxyStyle是Qt框架中QStyle类的一个子类,它提供了一种代理机制,允许开发者在不直接修改现有样式(QStyle)实现的情况下,对样式行为进行定制或扩展。通过继承QProxyStyle,开发者可以重写其虚方法&…...

AWS CLI 操作指南
AWS CLI 操作指南 世间本来就存在许多乐境,只是现代人为世间所累而未能予以关注,也就失去了许多体验乐境的机会。比如,忙里偷闲看云,以悠闲的心看悠闲的云,便是一种极妙的乐境。 本文将介绍如何配置 AWS CLI࿰…...

海盗王用golang重写的AccountServer功能
自从用golang重写了海盗王的网关gateserver以来,一直想把accountserver也重写了,但是一直没有进行。 趁上次刚写好那个golang版的更新器,还有些熟悉,于是把原来AccountServer的C代码重写读了个大概。它原版的写得太过于复杂&#…...

如何保证spring boot应用程序的安全性?
保证Spring Boot应用程序的安全性是至关重要的,以下是小编为大家列举的一些关键措施和最佳实践: 文章目录 1. 使用Spring Security2. 安全配置3. 数据加密4. 凭证管理5. 输入验证6. 异常处理7. 定期更新依赖8. 日志监控9. 审计日志10. 安全培训 1. 使用S…...

力扣 岛屿数量-200
岛屿数量-200 class Solution {//深度优先搜索 dfs public:int vis[300][300] {0};//用于标记的数组,标记是否遍历过int cnt 0;//岛屿计数//上下左右的移动方向数组int dx[4]{-1,1,0,0};int dy[4]{0,0,-1,1};//深度优先搜索void dfs(vector<vector<char>…...
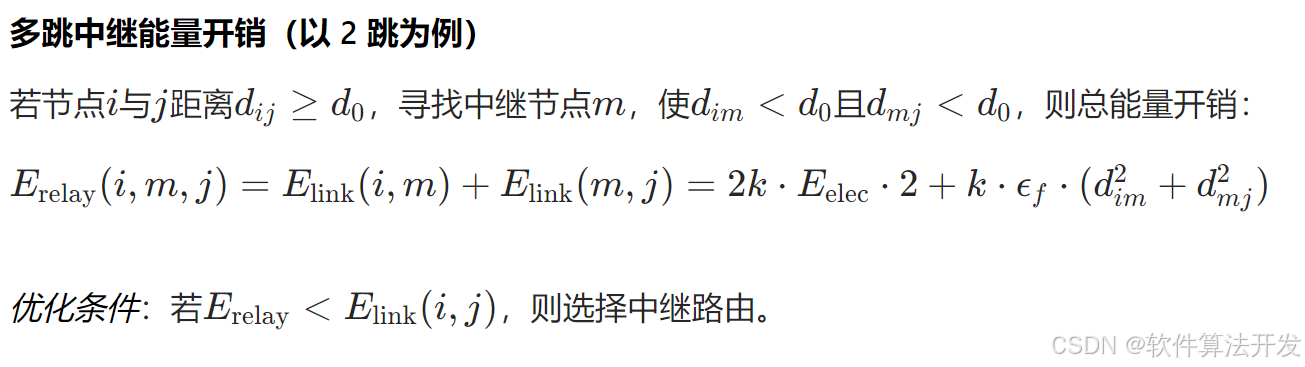
基于距离变化能量开销动态调整的WSN低功耗拓扑控制开销算法matlab仿真
目录 1.程序功能描述 2.测试软件版本以及运行结果展示 3.核心程序 4.算法仿真参数 5.算法理论概述 6.参考文献 7.完整程序 1.程序功能描述 通过动态调整节点通信的能量开销,平衡网络负载,延长WSN生命周期。具体通过建立基于距离的能量消耗模型&am…...

反向工程与模型迁移:打造未来商品详情API的可持续创新体系
在电商行业蓬勃发展的当下,商品详情API作为连接电商平台与开发者、商家及用户的关键纽带,其重要性日益凸显。传统商品详情API主要聚焦于商品基本信息(如名称、价格、库存等)的获取与展示,已难以满足市场对个性化、智能…...
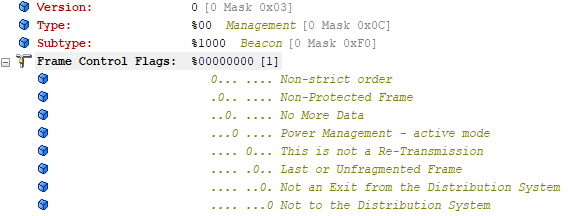
【WiFi帧结构】
文章目录 帧结构MAC头部管理帧 帧结构 Wi-Fi的帧分为三部分组成:MAC头部frame bodyFCS,其中MAC是固定格式的,frame body是可变长度。 MAC头部有frame control,duration,address1,address2,addre…...

鸿蒙中用HarmonyOS SDK应用服务 HarmonyOS5开发一个医院挂号小程序
一、开发准备 环境搭建: 安装DevEco Studio 3.0或更高版本配置HarmonyOS SDK申请开发者账号 项目创建: File > New > Create Project > Application (选择"Empty Ability") 二、核心功能实现 1. 医院科室展示 /…...
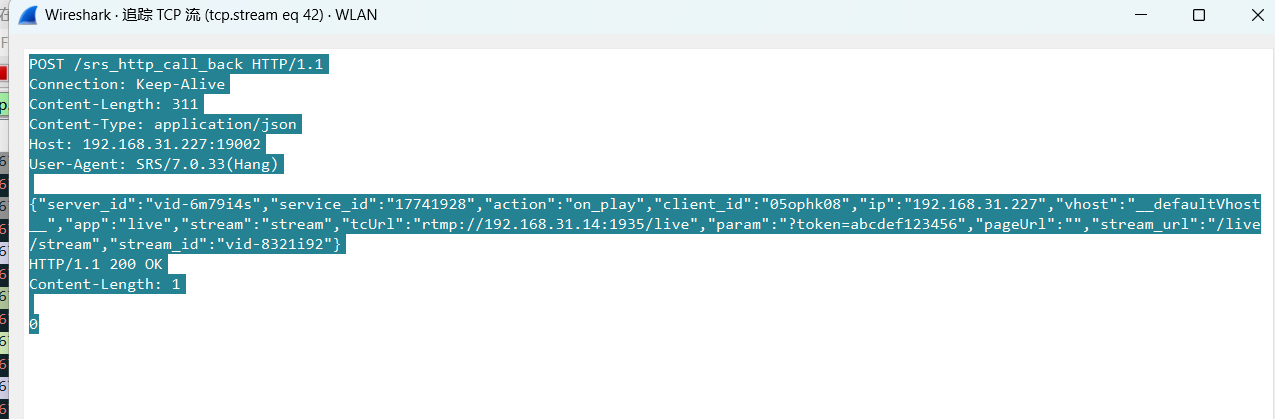
srs linux
下载编译运行 git clone https:///ossrs/srs.git ./configure --h265on make 编译完成后即可启动SRS # 启动 ./objs/srs -c conf/srs.conf # 查看日志 tail -n 30 -f ./objs/srs.log 开放端口 默认RTMP接收推流端口是1935,SRS管理页面端口是8080,可…...
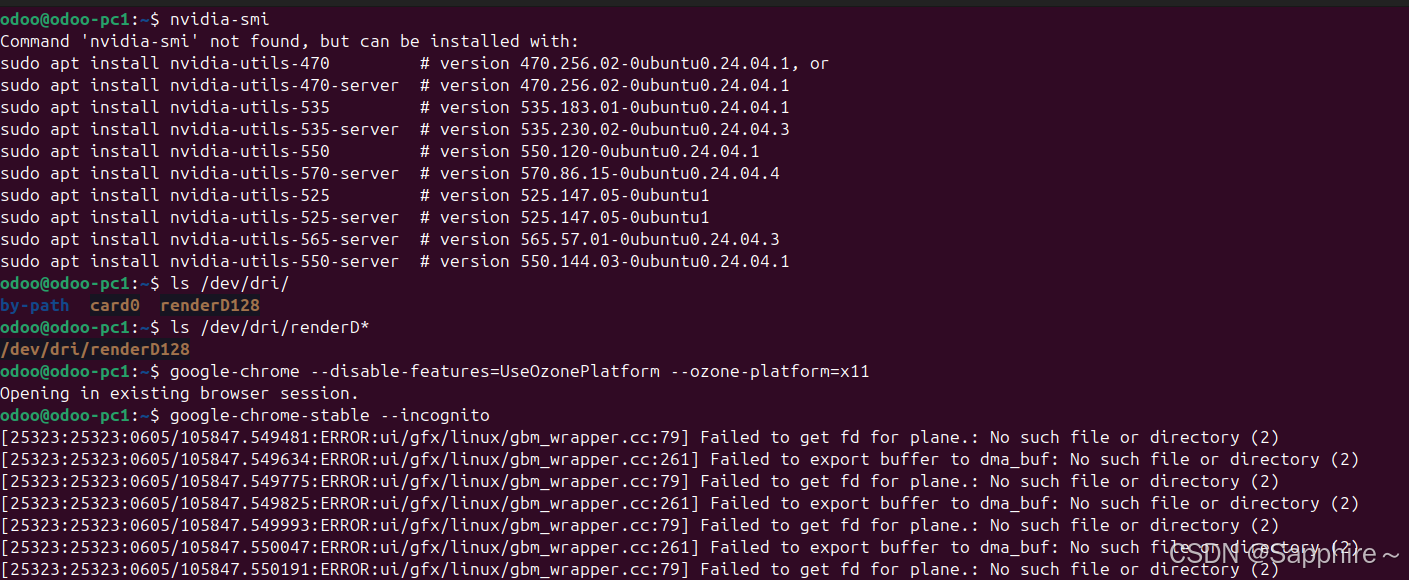
Linux-07 ubuntu 的 chrome 启动不了
文章目录 问题原因解决步骤一、卸载旧版chrome二、重新安装chorme三、启动不了,报错如下四、启动不了,解决如下 总结 问题原因 在应用中可以看到chrome,但是打不开(说明:原来的ubuntu系统出问题了,这个是备用的硬盘&a…...

Ascend NPU上适配Step-Audio模型
1 概述 1.1 简述 Step-Audio 是业界首个集语音理解与生成控制一体化的产品级开源实时语音对话系统,支持多语言对话(如 中文,英文,日语),语音情感(如 开心,悲伤)&#x…...

大模型多显卡多服务器并行计算方法与实践指南
一、分布式训练概述 大规模语言模型的训练通常需要分布式计算技术,以解决单机资源不足的问题。分布式训练主要分为两种模式: 数据并行:将数据分片到不同设备,每个设备拥有完整的模型副本 模型并行:将模型分割到不同设备,每个设备处理部分模型计算 现代大模型训练通常结合…...

服务器--宝塔命令
一、宝塔面板安装命令 ⚠️ 必须使用 root 用户 或 sudo 权限执行! sudo su - 1. CentOS 系统: yum install -y wget && wget -O install.sh http://download.bt.cn/install/install_6.0.sh && sh install.sh2. Ubuntu / Debian 系统…...

Python ROS2【机器人中间件框架】 简介
销量过万TEEIS德国护膝夏天用薄款 优惠券冠生园 百花蜂蜜428g 挤压瓶纯蜂蜜巨奇严选 鞋子除臭剂360ml 多芬身体磨砂膏280g健70%-75%酒精消毒棉片湿巾1418cm 80片/袋3袋大包清洁食品用消毒 优惠券AIMORNY52朵红玫瑰永生香皂花同城配送非鲜花七夕情人节生日礼物送女友 热卖妙洁棉…...