URDF(描述机器人模型)和SDF(Gazebo中用于描述仿真环境)
使用URDF(Unified Robot Description Format)
URDF是ROS中用于描述机器人模型的XML格式文件。你可以使用XML文件定义机器人的几何形状、惯性参数、关节和链接等。
示例URDF文件(my_robot.urdf):
<?xml version="1.0"?>
<robot name="my_robot"><link name="base_link"><visual><geometry><box size="0.5 0.5 0.2"/></geometry><material name="blue"><color rgba="0 0 1 1"/></material></visual><collision><geometry><box size="0.5 0.5 0.2"/></geometry></collision><inertial><mass value="10"/><inertia ixx="1" ixy="0" ixz="0" iyy="1" iyz="0" izz="1"/></inertial></link><joint name="base_to_arm" type="fixed"><parent link="base_link"/><child link="arm_link"/><origin xyz="0 0 0.2"/></joint><link name="arm_link"><visual><geometry><cylinder radius="0.05" length="0.5"/></geometry><material name="red"><color rgba="1 0 0 1"/></material></visual><collision><geometry><cylinder radius="0.05" length="0.5"/></geometry></collision><inertial><mass value="2"/><inertia ixx="0.1" ixy="0" ixz="0" iyy="0.1" iyz="0" izz="0.1"/></inertial></link>
</robot>
使用SDF(Simulation Description Format)
SDF是Gazebo中用于描述仿真环境的XML格式文件。你可以使用SDF定义仿真世界、机器人模型、传感器等。
示例SDF文件(my_world.world):
<?xml version="1.0"?>
<sdf version="1.6"><world name="default"><include><uri>model://ground_plane</uri></include><include><uri>model://sun</uri></include><model name="my_robot"><pose>0 0 0.1 0 0 0</pose><link name="base_link"><collision name="base_collision"><geometry><box><size>0.5 0.5 0.2</size></geometry></collision><visual name="base_visual"><geometry><box><size>0.5 0.5 0.2</size></geometry><material><ambient>0 0 1 1</ambient><diffuse>0 0 1 1</diffuse></material></visual><inertial><mass>10</mass><inertia><ixx>1</ixx><ixy>0</ixy><ixz>0</ixz><iyy>1</iyy><iyz>0</iyz><izz>1</izz></inertia></inertial></link><link name="arm_link"><collision name="arm_collision"><geometry><cylinder><radius>0.05</radius><length>0.5</length></cylinder></geometry></collision><visual name="arm_visual"><geometry><cylinder><radius>0.05</radius><length>0.5</length></cylinder></geometry><material><ambient>1 0 0 1</ambient><diffuse>1 0 0 1</diffuse></material></visual><inertial><mass>2</mass><inertia><ixx>0.1</ixx><ixy>0</ixy><ixz>0</ixz><iyy>0.1</iyy><iyz>0</iyz><izz>0.1</izz></inertia></inertial></link><joint name="base_to_arm" type="fixed"><parent>base_link</parent><child>arm_link</child><pose>0 0 0.2 0 0 0</pose></joint></model></world>
</sdf>下面是一个包含GNSS(全球导航卫星系统)、IMU(惯性测量单元)、LiDAR(激光雷达)和Camera(摄像头)等多种传感器的机器人的.xacro模型文件示例。我们将使用Xacro(XML Macros)来简化模型描述。
1. 创建my_robot.xacro文件
<?xml version="1.0"?>
<robot name="my_robot" xmlns:xacro="http://www.ros.org/wiki/xacro"><!-- Robot base link --><link name="base_link"><visual><geometry><box size="0.5 0.5 0.2"/></geometry><material name="blue"><color rgba="0 0 1 1"/></material></visual><collision><geometry><box size="0.5 0.5 0.2"/></geometry></collision><inertial><mass value="10"/><inertia ixx="1" ixy="0" ixz="0" iyy="1" iyz="0" izz="1"/></inertial></link><!-- GNSS Sensor --><xacro:macro name="gnss_sensor" params="parent xyz rpy"><link name="gnss_link"><visual><geometry><box size="0.05 0.05 0.02"/></geometry><material name="green"><color rgba="0 1 0 1"/></material></visual><collision><geometry><box size="0.05 0.05 0.02"/></geometry></collision><inertial><mass value="0.1"/><inertia ixx="0.001" ixy="0" ixz="0" iyy="0.001" iyz="0" izz="0.001"/></inertial></link><joint name="gnss_joint" type="fixed"><parent link="${parent}"/><child link="gnss_link"/><origin xyz="${xyz}" rpy="${rpy}"/></joint></xacro:macro><!-- IMU Sensor --><xacro:macro name="imu_sensor" params="parent xyz rpy"><link name="imu_link"><visual><geometry><box size="0.05 0.05 0.02"/></geometry><material name="yellow"><color rgba="1 1 0 1"/></material></visual><collision><geometry><box size="0.05 0.05 0.02"/></geometry></collision><inertial><mass value="0.1"/><inertia ixx="0.001" ixy="0" ixz="0" iyy="0.001" iyz="0" izz="0.001"/></inertial></link><joint name="imu_joint" type="fixed"><parent link="${parent}"/><child link="imu_link"/><origin xyz="${xyz}" rpy="${rpy}"/></joint></xacro:macro><!-- LiDAR Sensor --><xacro:macro name="lidar_sensor" params="parent xyz rpy"><link name="lidar_link"><visual><geometry><cylinder radius="0.05" length="0.1"/></geometry><material name="gray"><color rgba="0.5 0.5 0.5 1"/></material></visual><collision><geometry><cylinder radius="0.05" length="0.1"/></geometry></collision><inertial><mass value="0.5"/><inertia ixx="0.01" ixy="0" ixz="0" iyy="0.01" iyz="0" izz="0.01"/></inertial></link><joint name="lidar_joint" type="fixed"><parent link="${parent}"/><child link="lidar_link"/><origin xyz="${xyz}" rpy="${rpy}"/></joint></xacro:macro><!-- Camera Sensor --><xacro:macro name="camera_sensor" params="parent xyz rpy"><link name="camera_link"><visual><geometry><box size="0.03 0.03 0.03"/></geometry><material name="black"><color rgba="0 0 0 1"/></material></visual><collision><geometry><box size="0.03 0.03 0.03"/></geometry></collision><inertial><mass value="0.2"/><inertia ixx="0.001" ixy="0" ixz="0" iyy="0.001" iyz="0" izz="0.001"/></inertial></link><joint name="camera_joint" type="fixed"><parent link="${parent}"/><child link="camera_link"/><origin xyz="${xyz}" rpy="${rpy}"/></joint></xacro:macro><!-- Instantiate sensors --><xacro:gnss_sensor parent="base_link" xyz="0.25 0 0.1" rpy="0 0 0"/><xacro:imu_sensor parent="base_link" xyz="0.25 0 0.15" rpy="0 0 0"/><xacro:lidar_sensor parent="base_link" xyz="0.25 0 0.2" rpy="0 0 0"/><xacro:camera_sensor parent="base_link" xyz="0.25 0 0.25" rpy="0 0 0"/></robot>
2. 将.xacro文件转换为.urdf文件
您可以使用以下命令将.xacro文件转换为.urdf文件:
rosrun xacro xacro --inorder my_robot.xacro > my_robot.urdf
3. 在Gazebo中加载模型
创建一个.world文件(例如my_world.world)并包含您的机器人模型:
<?xml version="1.0"?>
<sdf version="1.6"><world name="default"><include><uri>model://ground_plane</uri></include><include><uri>model://sun</uri></include><model name="my_robot"><include><uri>model://my_robot</uri></include></model></world>
</sdf>
然后在终端中运行:
roslaunch gazebo_ros empty_world.launch world_name:=my_world.world
相关文章:
和SDF(Gazebo中用于描述仿真环境))
URDF(描述机器人模型)和SDF(Gazebo中用于描述仿真环境)
使用URDF(Unified Robot Description Format) URDF是ROS中用于描述机器人模型的XML格式文件。你可以使用XML文件定义机器人的几何形状、惯性参数、关节和链接等。 示例URDF文件(my_robot.urdf): <?xml version&…...
时间插入、删除和获取随机数)
力扣380:O(1)时间插入、删除和获取随机数
实现RandomizedSet 类: RandomizedSet() 初始化 RandomizedSet 对象bool insert(int val) 当元素 val 不存在时,向集合中插入该项,并返回 true ;否则,返回 false 。bool remove(int val) 当元素 val 存在时࿰…...

【C++boost::asio网络编程】有关socket的创建和连接的笔记
socket的创建和连接 tcp客户端创建端点tcp服务端创建端点创建socket创建TCP 服务器端的 acceptor 套接字创建 acceptor 套接字并绑定客户端连接到服务器通过ip地址解析通过域名解析 服务端接收新连接 tcp客户端创建端点 int client_end_point() {std::string raw_ip_address …...

超级灵感:前端页面功能统一管理方案
前端页面功能统一管理方案 引言 我和朋友聊天想到一个灵感,关于支付状态机管理,这个类可以让我们知道具体上一个状态和下一个状态,这是由于那个事件触发改变,这个功能设计非常好! 从而讨论出为什么我们不能把某一个…...

力扣第 77 题 组合
题目描述 给定两个整数 n 和 k,返回范围 [1, n] 中所有可能的 k 个数的组合。 你可以按任意顺序返回答案。 示例 示例 1 输入: n 4, k 2输出: [[1, 2], [1, 3], [1, 4], [2, 3], [2, 4], [3, 4]]示例 2 输入: n 1, k …...

(超详细图文)PLSQL Developer 配置连接远程 Oracle 服务
1、下载配置文件 (超详细图文详情)Navicat 配置连接 Oracle-CSDN博客 将下载的文件解压到单独文件夹,如:D:\App\App_Java\Oracle\instantclient-basic-windows.x64-19.25.0.0.0dbru 2、配置 打开 PLSQL Developer,登…...

元器件选型与参数13 电源的分类-线性电源参数 RT9013 AMS1117 PCB布局布线
目录 一、线性电源 1、重要参数 2、线性电源效率一定低吗 3、线性电源并联扩流 4、常见电路 RT9013-LDO AMS1117-xx-LDO 5、布局布线 6、外置输入与电池供电 7、单片机控制其他模组供电实现低功耗 二、开关电源与线性电源配合 1、高效率与低噪声 DC-DC电源大致分为…...

RHEL7+Oracle11.2 RAC集群-多路径(multipath+udev)安装步骤
RHEL7Oracle11.2RAC集群-多路径(multipathudev)安装 配置虚拟存储 使用StarWind Management Console软件,配置存储 dggrid1: 1g*3 Dggrid2: 1g*3 Dgsystem: 5g*1 系统表空间,临时表空间,UNDO,参数文件…...

每日速记10道java面试题03
其他资料 每日速记10道java面试题01-CSDN博客 每日速记10道java面试题02-CSDN博客 目录 一、你使用过java的反射机制吗?如何应用反射? 二、什么是泛型?泛型的作用是什么? 三、java的泛型擦除是什么? 四、Java 中…...

Vue 3 的双向绑定原理
Vue 3 的双向绑定原理是基于 响应式系统 和 数据劫持 技术来实现的。在 Vue 3 中,双向绑定通常是通过 v-model 指令来完成的,它本质上是数据的双向同步:当数据改变时,视图自动更新,反之,视图的修改也会更新…...

如何使用 Chrome 无痕浏览模式访问网站?
无痕浏览(Incognito Mode)是 Google Chrome 浏览器提供的一种隐私保护功能,它允许用户在一个独立的会话中浏览网页,而不会记录用户的浏览历史、下载历史、表单数据等。这对于希望保护个人隐私或进行临时性匿名浏览的用户来说非常有…...

Idea 2024.3 突然出现点击run 运行没有反应,且没有任何提示。
写这篇文章的目的是为了提供一个新的解决思路,因为存在同病不同原因。 如果你进行了1. 检查运行配置 (Run Configuration) 2. 清理和重建项目 3. 清除缓存并重启 IDEA 4.排除kotlin 5.重装idea等等操作之后仍然没有解决,可以试着按一下步骤进行解决。 检…...

【小白学机器学习36】关于独立概率,联合概率,交叉概率,交叉概率和,总概率等 概念辨析的例子
目录 1 先说结论 2 联合概率 3 边缘概率 4 (行/列)边缘概率的和 总概率1 5 条件概率 5.1 条件概率的除法公式 5.2 条件概率和联合概率区别 1 先说结论 关于独立概率,联合概率,交叉概率,交叉概率和,总概率 类型含义 …...

Spring Boot 项目——分层架构
在创建一个 Spring Boot 项目时,为了提高代码的可维护性、可扩展性和清晰度,通常会按照一定的分层架构进行设计。常见的分层架构包括以下几层: 1. Controller 层(Web 层) 作用:接收用户请求,并…...

wordpress网站首页底部栏显示网站备案信息
一、页脚文件footer.php 例如,wordpress主题使用的是simple-life主题,服务器IP为192.168.68.89,在wordpress主题文件中有个页脚文件footer.php,这是一个包含网站页脚代码的文件。 footer.php 路径如下: /www/wwwroot/192.168.68…...

python面向对象编程练习
学生成绩管理系统 定义一个Student类,包括属性(姓名、成绩)和方法(设置成绩、获取成绩、计算平均成绩)。 实例化多个学生对象并调用方法。 功能说明: Student 类: init(self, name):…...

OpenCV_Code_LOG
孔洞填充 void fillHole(const Mat srcBw, Mat &dstBw) {Size m_Size srcBw.size();Mat TempMat::zeros(m_Size.height2,m_Size.width2,srcBw.type());//延展图像srcBw.copyTo(Temp(Range(1, m_Size.height 1), Range(1, m_Size.width 1)));cv::floodFill(Temp, Point(…...

力扣第 74 题是 搜索二维矩阵
题目描述 给定一个 m x n 的矩阵 matrix 和一个目标值 target,请你编写一个函数来判断目标值 target 是否在矩阵中。 每行的元素按升序排列。每列的元素按升序排列。 示例 1 输入: matrix [[1, 4, 7, 11],[2, 5, 8, 12],[3, 6, 9, 16],[10, 13, 14…...

[极客大挑战 2019]BabySQL--详细解析
信息搜集 进入界面: 输入用户名为admin,密码随便输一个: 发现是GET传参,有username和password两个传参点。 我们测试一下password点位能不能注入: 单引号闭合报错,根据报错信息,我们可以判断…...

实现Linux平台自定义协议族
一 简介 我们常常在Linux系统中编写socket接收TCP/UDP协议数据,大家有没有想过它怎么实现的,如果我们要实现socket接收自定义的协议数据又该怎么做呢?带着这个疑问,我们一起往下看吧~~ 二 Linux内核函数简介 在Linux系统中要想…...

Qwen3-Embedding-0.6B深度解析:多语言语义检索的轻量级利器
第一章 引言:语义表示的新时代挑战与Qwen3的破局之路 1.1 文本嵌入的核心价值与技术演进 在人工智能领域,文本嵌入技术如同连接自然语言与机器理解的“神经突触”——它将人类语言转化为计算机可计算的语义向量,支撑着搜索引擎、推荐系统、…...
k8s业务程序联调工具-KtConnect
概述 原理 工具作用是建立了一个从本地到集群的单向VPN,根据VPN原理,打通两个内网必然需要借助一个公共中继节点,ktconnect工具巧妙的利用k8s原生的portforward能力,简化了建立连接的过程,apiserver间接起到了中继节…...

Java求职者面试指南:Spring、Spring Boot、MyBatis框架与计算机基础问题解析
Java求职者面试指南:Spring、Spring Boot、MyBatis框架与计算机基础问题解析 一、第一轮提问(基础概念问题) 1. 请解释Spring框架的核心容器是什么?它在Spring中起到什么作用? Spring框架的核心容器是IoC容器&#…...
排序算法总结(C++)
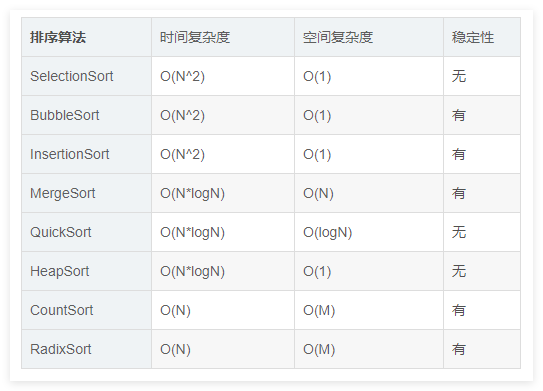
目录 一、稳定性二、排序算法选择、冒泡、插入排序归并排序随机快速排序堆排序基数排序计数排序 三、总结 一、稳定性 排序算法的稳定性是指:同样大小的样本 **(同样大小的数据)**在排序之后不会改变原始的相对次序。 稳定性对基础类型对象…...

作为测试我们应该关注redis哪些方面
1、功能测试 数据结构操作:验证字符串、列表、哈希、集合和有序的基本操作是否正确 持久化:测试aof和aof持久化机制,确保数据在开启后正确恢复。 事务:检查事务的原子性和回滚机制。 发布订阅:确保消息正确传递。 2、性…...
基于PHP的连锁酒店管理系统
有需要请加文章底部Q哦 可远程调试 基于PHP的连锁酒店管理系统 一 介绍 连锁酒店管理系统基于原生PHP开发,数据库mysql,前端bootstrap。系统角色分为用户和管理员。 技术栈 phpmysqlbootstrapphpstudyvscode 二 功能 用户 1 注册/登录/注销 2 个人中…...
django blank 与 null的区别
1.blank blank控制表单验证时是否允许字段为空 2.null null控制数据库层面是否为空 但是,要注意以下几点: Django的表单验证与null无关:null参数控制的是数据库层面字段是否可以为NULL,而blank参数控制的是Django表单验证时字…...
HybridVLA——让单一LLM同时具备扩散和自回归动作预测能力:训练时既扩散也回归,但推理时则扩散
前言 如上一篇文章《dexcap升级版之DexWild》中的前言部分所说,在叠衣服的过程中,我会带着团队对比各种模型、方法、策略,毕竟针对各个场景始终寻找更优的解决方案,是我个人和我司「七月在线」的职责之一 且个人认为,…...
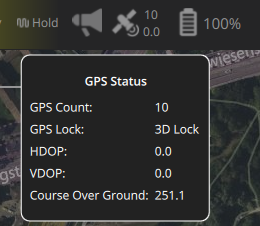
【PX4飞控】mavros gps相关话题分析,经纬度海拔获取方法,卫星数锁定状态获取方法
使用 ROS1-Noetic 和 mavros v1.20.1, 携带经纬度海拔的话题主要有三个: /mavros/global_position/raw/fix/mavros/gpsstatus/gps1/raw/mavros/global_position/global 查看 mavros 源码,来分析他们的发布过程。发现前两个话题都对应了同一…...

用js实现常见排序算法
以下是几种常见排序算法的 JS实现,包括选择排序、冒泡排序、插入排序、快速排序和归并排序,以及每种算法的特点和复杂度分析 1. 选择排序(Selection Sort) 核心思想:每次从未排序部分选择最小元素,与未排…...