OpenCV相机标定与3D重建(7)鱼眼镜头立体校正的函数stereoRectify()的使用
- 操作系统:ubuntu22.04
- OpenCV版本:OpenCV4.9
- IDE:Visual Studio Code
- 编程语言:C++11
算法描述
cv::fisheye::stereoRectify 是 OpenCV 中用于鱼眼镜头立体校正的函数。该函数计算两个相机之间的校正变换,使得从两个相机拍摄的图像中的对应点在行上对齐。这一步骤对于后续的立体匹配和深度估计非常重要。
函数原型
void cv::fisheye::stereoRectify
(InputArray K1,InputArray D1,InputArray K2,InputArray D2,const Size & imageSize,InputArray R,InputArray tvec,OutputArray R1,OutputArray R2,OutputArray P1,OutputArray P2,OutputArray Q,int flags,const Size & newImageSize = Size(),double balance = 0.0,double fov_scale = 1.0
)
参数
- 参数K1: 第一个相机的内参矩阵。
- 参数D1: 第一个相机的畸变参数。
- 参数K2: 第二个相机的内参矩阵。
- 参数D2: 第二个相机的畸变参数。
- 参数imageSize: 用于立体标定的图像尺寸。
- 参数R: 第一和第二个相机坐标系之间的旋转矩阵。
- 参数tvec: 相机坐标系之间的平移向量。
- 参数R1: 输出第一个相机的3x3校正变换(旋转矩阵)。
- 参数R2: 输出第二个相机的3x3校正变换(旋转矩阵)。
- 参数P1: 在新的(校正后的)坐标系统中,输出第一个相机的3x4投影矩阵。
- 参数P2: 在新的(校正后的)坐标系统中,输出第二个相机的3x4投影矩阵。
- 参数Q: 输出4×4的视差到深度映射矩阵(见 reprojectImageTo3D 函数)。
- 参数flags: 操作标志,可以是0或 fisheye::CALIB_ZERO_DISPARITY。如果设置了该标志,函数将使每个相机的主点在校正后的视图中具有相同的像素坐标。如果没有设置该标志,函数可能仍然会在水平或垂直方向上移动图像(取决于极线的方向),以最大化有用的图像区域。
- 参数newImageSize: 校正后的新图像分辨率。应将相同的大小传递给 initUndistortRectifyMap(参见OpenCV示例目录中的 stereo_calib.cpp)。当传递 (0,0) 时(默认值),它被设置为原始的 imageSize。将其设置为更大的值可以帮助你保留原始图像中的细节,特别是在存在较大径向畸变的情况下。
- 参数balance: 设置新的焦距范围在最小焦距和最大焦距之间。平衡值在 [0, 1] 范围内。
- 参数fov_scale: 新焦距的除数。
代码示例
#include <opencv2/opencv.hpp>
#include <iostream>int main() {// 相机内参矩阵 K1 和 K2cv::Mat K1 = (cv::Mat_<double>(3, 3) << 458.654, 0, 367.215, 0, 457.296, 248.375, 0, 0, 1);cv::Mat K2 = (cv::Mat_<double>(3, 3) << 458.654, 0, 367.215, 0, 457.296, 248.375, 0, 0, 1);// 畸变系数 D1 和 D2cv::Mat D1 = (cv::Mat_<double>(1, 4) << 0.0695303, -0.160713, -0.00480225, 0.000911994);cv::Mat D2 = (cv::Mat_<double>(1, 4) << 0.0695303, -0.160713, -0.00480225, 0.000911994);// 图像尺寸cv::Size imageSize(720, 576);// 旋转矩阵 R 和平移向量 tveccv::Mat R = (cv::Mat_<double>(3, 3) << 1, 0, 0, 0, 1, 0, 0, 0, 1); // 示例数据cv::Mat tvec = (cv::Mat_<double>(3, 1) << 0.1, 0.05, 0.02); // 示例数据// 输出的校正旋转矩阵cv::Mat R1, R2;// 输出的投影矩阵cv::Mat P1, P2;// 输出的重投影矩阵cv::Mat Q;// 进行立体校正cv::fisheye::stereoRectify(K1, D1, K2, D2,imageSize, R, tvec,R1, R2, P1, P2, Q,cv::CALIB_ZERO_DISPARITY,imageSize, 0.0, 1.0);// 打印结果std::cout << "R1: " << std::endl << R1 << std::endl;std::cout << "R2: " << std::endl << R2 << std::endl;std::cout << "P1: " << std::endl << P1 << std::endl;std::cout << "P2: " << std::endl << P2 << std::endl;std::cout << "Q: " << std::endl << Q << std::endl;return 0;
}
运行结果
R1:
[0.8804509063256238, 0.4402254531628119, 0.1760901812651247;-0.4402254531628119, 0.8969404364876068, -0.04122382540495731;-0.1760901812651247, -0.04122382540495731, 0.9835104698380172]
R2:
[0.8804509063256238, 0.4402254531628119, 0.1760901812651247;-0.4402254531628119, 0.8969404364876068, -0.04122382540495731;-0.1760901812651247, -0.04122382540495731, 0.9835104698380172]
P1:
[463.3157037596288, 0, 216.7917896240862, 0;0, 463.3157037596288, 262.3111277744742, 0;0, 0, 1, 0]
P2:
[463.3157037596288, 0, 216.7917896240862, 52.62254833641767;0, 463.3157037596288, 262.3111277744742, 0;0, 0, 1, 0]
Q:
[1, 0, 0, -216.7917896240862;0, 1, 0, -262.3111277744742;0, 0, 0, 463.3157037596288;0, 0, -8.804509063256239, 0]相关文章:
鱼眼镜头立体校正的函数stereoRectify()的使用)
OpenCV相机标定与3D重建(7)鱼眼镜头立体校正的函数stereoRectify()的使用
操作系统:ubuntu22.04 OpenCV版本:OpenCV4.9 IDE:Visual Studio Code 编程语言:C11 算法描述 cv::fisheye::stereoRectify 是 OpenCV 中用于鱼眼镜头立体校正的函数。该函数计算两个相机之间的校正变换,使得从两个相机拍摄的图像…...

前端如何获取unpkg的资源链接
在现代前端开发中,快速获取和使用npm包是一个常见需求。unpkg是一个全球性的CDN服务,它为npm上的每个包提供了快速访问。通过unpkg,你可以轻松地通过URL获取任何npm包的文件。本文将介绍如何获取unpkg的资源链接。 unpkg简介 unpkg是一个快…...

Flink 离线计算
文章目录 一、样例一:读 csv 文件生成 csv 文件二、样例二:读 starrocks 写 starrocks三、样例三:DataSet、Table Sql 处理后写入 StarRocks四、遇到的坑 <dependency><groupId>org.apache.flink</groupId><artifactId&…...

Git | 理解团队合作中Git分支的合并操作
合并操作 团队合作中Git分支的合并操作分支合并过程1.创建feature/A分支的过程2. 创建分支feature/A-COPY3.合并分支查看代码是否改变 团队合作中Git分支的合并操作 需求 假设团队项目中的主分支是main,团队成员A基于主分支main创建了feature/A,而我又在团队成员A创…...

C++多态的实现原理
【欢迎关注编码小哥,学习更多实用的编程方法和技巧】 1、类的继承 子类对象在创建时会首先调用父类的构造函数 父类构造函数执行结束后,执行子类的构造函数 当父类的构造函数有参数时,需要在子类的初始化列表中显式调用 Child(int i) : …...

[极客大挑战 2019]PHP--详细解析
信息搜集 想查看页面源代码,但是右键没有这个选项。 我们可以ctrlu或者在url前面加view-source:查看: 没什么有用信息。根据页面的hint,我们考虑扫一下目录看看能不能扫出一些文件. 扫到了备份文件www.zip,解压一下查看网站源代码…...

map用于leetcode
//第一种map方法 function groupAnagrams(strs) {let map new Map()for (let str of strs) {let key str ? : str.split().sort().join()if (!map.has(key)) {map.set(key, [])}map.get(key).push(str)} //此时map为Map(3) {aet > [ eat, tea, ate ],ant > [ tan,…...

CommonJS 和 ES Modules 的 区别
CommonJS 和 ES Modules 的 区别 1. CommonJS 和 ES Modules 区别?1.1 语法差异CommonJS:ES Modules: 1.2. 加载机制CommonJS:ES Modules: 1.3. 运行时行为CommonJS:ES Modules: 1.4. 兼容性和使用场景Com…...

科技为翼 助残向新 高德地图无障碍导航规划突破1.5亿次
今年12月03日是第33个国际残疾人日。在当下科技发展日新月异的时代,如何让残障人士共享科技红利、平等地参与社会生活,成为当前社会关注的热点。 中国有超过8500万残障人士,其中超过2400万为肢残人群,视力障碍残疾人数超过1700万…...

Flink四大基石之Time (时间语义) 的使用详解
目录 一、引言 二、Time 的分类及 EventTime 的重要性 Time 分类详述 EventTime 重要性凸显 三、Watermark 机制详解 核心原理 Watermark能解决什么问题,如何解决的? Watermark图解原理 举例 总结 多并行度的水印触发 Watermark代码演示 需求 代码演示ÿ…...

Spring WebFlux与Spring MVC
Spring WebFlux 是对 Spring Boot 项目中传统 Spring MVC 部分的一种替代选择,主要是为了解决现代 Web 应用在高并发和低延迟场景下的性能瓶颈。 1.WebFlux 是对 Spring MVC 的替代 架构替代: Spring MVC 使用的是基于 Servlet 规范的阻塞式模型…...

【深度学习基础】一篇入门模型评估指标(分类篇)
🌈 个人主页:十二月的猫-CSDN博客 🔥 系列专栏: 🏀深度学习_十二月的猫的博客-CSDN博客 💪🏻 十二月的寒冬阻挡不了春天的脚步,十二点的黑夜遮蔽不住黎明的曙光 目录 1. 前言 2. 模…...

D80【 python 接口自动化学习】- python基础之HTTP
day80 requests请求加入headers 学习日期:20241126 学习目标:http定义及实战 -- requests请求加入headers 学习笔记: requests请求加入headers import requestsurlhttps://movie.douban.com/j/search_subjects params{"type":…...

⽂件操作详解
⽬录 一 文件操作的引入 1 为什么使⽤⽂件? 2 什么是⽂件? 3 文件分类(1 从⽂件功能的⻆度来分类:程序⽂件/数据⽂件 2根据数据的组织形式:为⽂本⽂件/⼆进制⽂件) 二 ⽂件的打开和关闭 1 …...

双高(高比例新能源发电和高比例电力电子设备)系统宽频振荡研究现状
1 为什么会形成双高电力系统 (1)新能源发电比例增加 双碳计划,新能源革命,可再生能源逐步代替传统化石能源,未来新能源发电将成为最终能源需求的主要来源。 (2)电力电子设备数量增加 为了实…...

TorchMoji使用教程/环境配置(2024)
TorchMoji使用教程/环境配置(2024) TorchMoji简介 这是一个基于pytorch库,用于将文本分类成不同的多种emoji表情的库,适用于文本的情感分析 配置流程 从Anaconda官网根据提示安装conda git拉取TorchMoji git clone https://gi…...

使用 Python 中的 TripoSR 根据图像创建 3D 对象
使用 Python 中的 TripoSR 根据图像创建 3D 对象 1. 效果图2. 步骤图像到 3D 对象设置环境导入必要的库设置设备创建计时器实用程序上传并准备图像处理输入图像生成 3D 模型并渲染下载.stl 文件展示结果3. 源码4. 遇到的问题及解决参考这篇博客将引导如何使用Python 及 TripoSR…...
和 IoC(控制反转))
Spring 框架中AOP(面向切面编程)和 IoC(控制反转)
在 Spring 框架中,AOP(面向切面编程)和 IoC(控制反转)是两个核心概念,它们分别负责不同的功能。下面我将通过通俗易懂的解释来帮助你理解这两个概念。 IoC(控制反转) IoC 是 Inver…...
电机瞬态分析基础(7):坐标变换(3)αβ0变换,dq0变换
1. 三相静止坐标系与两相静止坐标系的坐标变换―αβ0坐标变换 若上述x、y坐标系在空间静止不动,且x轴与A轴重合,即,如图1所示,则为两相静止坐标系,常称为坐标系,考虑到零轴分量,也称为αβ0坐标…...

Open3D (C++) 生成任意3D椭圆点云
目录 一、算法原理1、几何参数2、数学公式二、代码实现三、结果展示一、算法原理 1、几何参数 在三维空间中,椭圆由以下参数定义: 椭圆中心点 c = ( x 0 , y 0 , z...

谷歌浏览器插件
项目中有时候会用到插件 sync-cookie-extension1.0.0:开发环境同步测试 cookie 至 localhost,便于本地请求服务携带 cookie 参考地址:https://juejin.cn/post/7139354571712757767 里面有源码下载下来,加在到扩展即可使用FeHelp…...
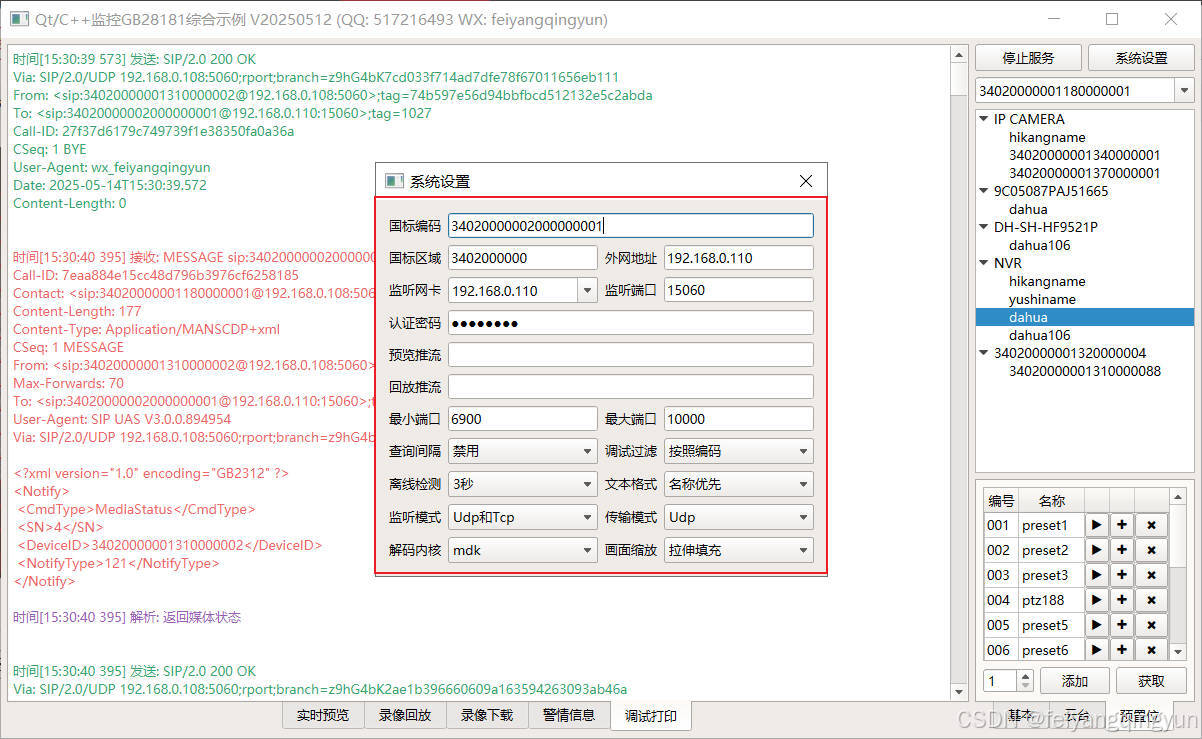
Qt/C++开发监控GB28181系统/取流协议/同时支持udp/tcp被动/tcp主动
一、前言说明 在2011版本的gb28181协议中,拉取视频流只要求udp方式,从2016开始要求新增支持tcp被动和tcp主动两种方式,udp理论上会丢包的,所以实际使用过程可能会出现画面花屏的情况,而tcp肯定不丢包,起码…...
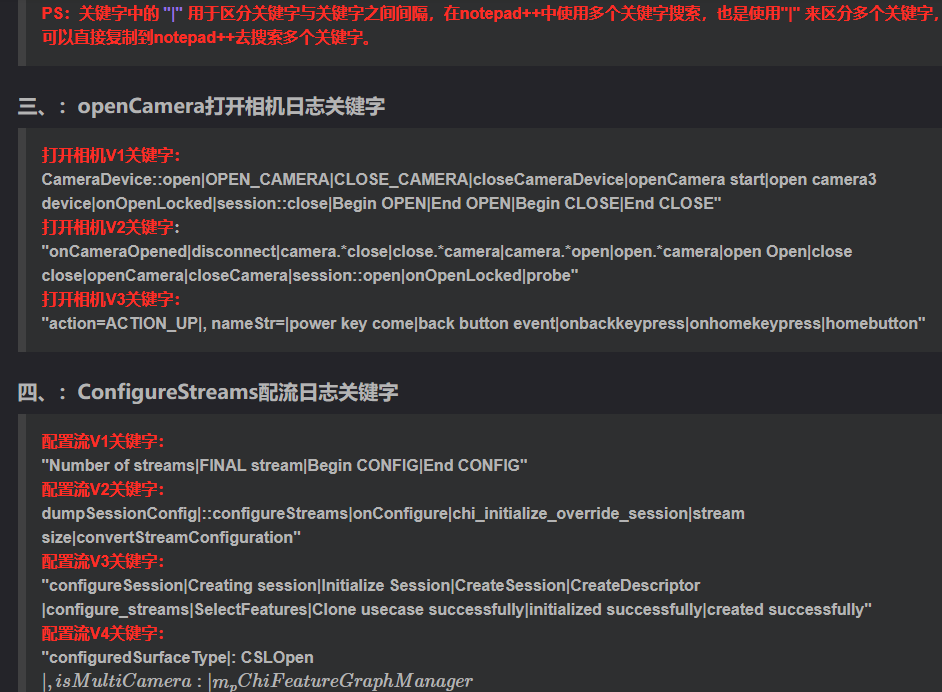
相机Camera日志实例分析之二:相机Camx【专业模式开启直方图拍照】单帧流程日志详解
【关注我,后续持续新增专题博文,谢谢!!!】 上一篇我们讲了: 这一篇我们开始讲: 目录 一、场景操作步骤 二、日志基础关键字分级如下 三、场景日志如下: 一、场景操作步骤 操作步…...

vscode(仍待补充)
写于2025 6.9 主包将加入vscode这个更权威的圈子 vscode的基本使用 侧边栏 vscode还能连接ssh? debug时使用的launch文件 1.task.json {"tasks": [{"type": "cppbuild","label": "C/C: gcc.exe 生成活动文件"…...
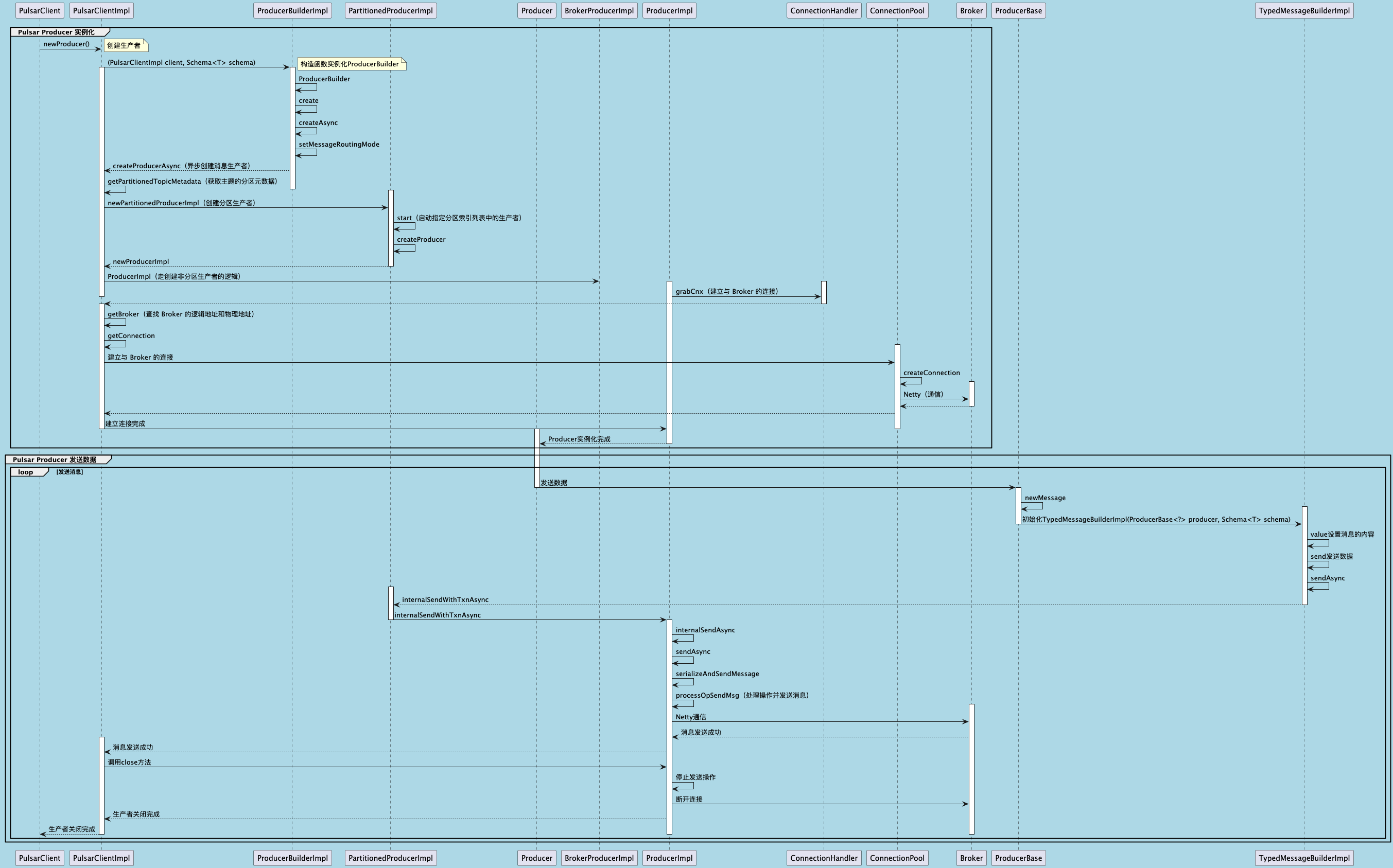
聊聊 Pulsar:Producer 源码解析
一、前言 Apache Pulsar 是一个企业级的开源分布式消息传递平台,以其高性能、可扩展性和存储计算分离架构在消息队列和流处理领域独树一帜。在 Pulsar 的核心架构中,Producer(生产者) 是连接客户端应用与消息队列的第一步。生产者…...
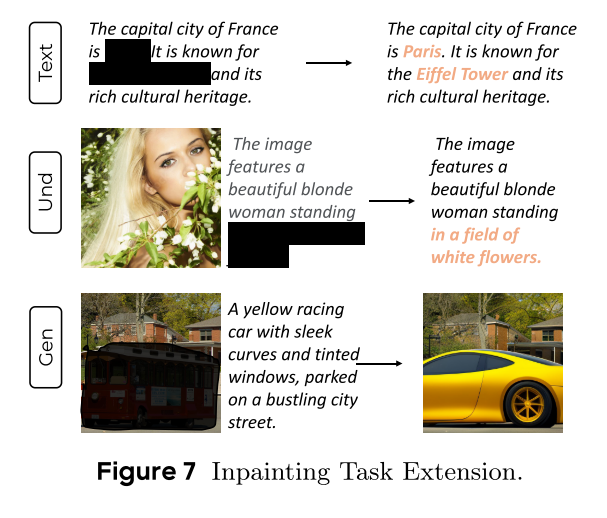
MMaDA: Multimodal Large Diffusion Language Models
CODE : https://github.com/Gen-Verse/MMaDA Abstract 我们介绍了一种新型的多模态扩散基础模型MMaDA,它被设计用于在文本推理、多模态理解和文本到图像生成等不同领域实现卓越的性能。该方法的特点是三个关键创新:(i) MMaDA采用统一的扩散架构…...
Vue2 第一节_Vue2上手_插值表达式{{}}_访问数据和修改数据_Vue开发者工具
文章目录 1.Vue2上手-如何创建一个Vue实例,进行初始化渲染2. 插值表达式{{}}3. 访问数据和修改数据4. vue响应式5. Vue开发者工具--方便调试 1.Vue2上手-如何创建一个Vue实例,进行初始化渲染 准备容器引包创建Vue实例 new Vue()指定配置项 ->渲染数据 准备一个容器,例如: …...
P3 QT项目----记事本(3.8)
3.8 记事本项目总结 项目源码 1.main.cpp #include "widget.h" #include <QApplication> int main(int argc, char *argv[]) {QApplication a(argc, argv);Widget w;w.show();return a.exec(); } 2.widget.cpp #include "widget.h" #include &q…...
)
WEB3全栈开发——面试专业技能点P2智能合约开发(Solidity)
一、Solidity合约开发 下面是 Solidity 合约开发 的概念、代码示例及讲解,适合用作学习或写简历项目背景说明。 🧠 一、概念简介:Solidity 合约开发 Solidity 是一种专门为 以太坊(Ethereum)平台编写智能合约的高级编…...

IoT/HCIP实验-3/LiteOS操作系统内核实验(任务、内存、信号量、CMSIS..)
文章目录 概述HelloWorld 工程C/C配置编译器主配置Makefile脚本烧录器主配置运行结果程序调用栈 任务管理实验实验结果osal 系统适配层osal_task_create 其他实验实验源码内存管理实验互斥锁实验信号量实验 CMISIS接口实验还是得JlINKCMSIS 简介LiteOS->CMSIS任务间消息交互…...