【C++boost::asio网络编程】有关异步读写api的笔记
异步读写api
- 异步写操作
- async_write_some
- async_send
- 异步读操作
- async_read_some
- async_receive
定义一个Session类,主要是为了服务端专门为客户端服务创建的管理类
class Session {
public:Session(std::shared_ptr<asio::ip::tcp::socket> socket);void Connect(const asio::ip::tcp::endpoint& ep);
private:std::shared_ptr<asio::ip::tcp::socket> _socket;
};
异步写操作
在介绍异步写之前,需要先封装一个Node结构,用来管理发送的数据
class MsgNode
{friend class Session;
public:MsgNode(const char* msg, int total_len):_total_len(total_len),_cur_len(0){_msg = new char[total_len];memcpy(_msg, msg, total_len);}MsgNode(int total_len):_total_len(total_len),_cur_len(0){_msg = new char[_total_len];}~MsgNode(){delete[] _msg;}
private:char* _msg;int _total_len;int _cur_len;
};
其中,_msg表示要发送的数据,_cur_len表示已经发送的长度,而_total_len表示数据的总长度
async_write_some

通过源码可以看出,async_write_some需要两个参数。第一个参数是buffer结构的数据,用来放需要发送的数据;第二个参数是一个回调函数,这个回调函数又有两个参数,一个是用来存放错误码的对象,另一个是无符号整数(这个无符号整数代表的就是当前具体发送数据的大小)
当调用完async_write_some之后(即一次异步写操作结束之后),系统会调用这个回调函数。
void Session::WriteCallBackErr(const boost::system::error_code& ec, std::size_t bytes_transferred, std::shared_ptr<MsgNode> node)
{if (node->_cur_len + bytes_transferred <= node->_total_len){node->_cur_len += bytes_transferred;this->_socket->async_write_some(boost::asio::buffer(node->_msg + node->_cur_len, node->_total_len - node->_cur_len),std::bind(&Session::WriteCallBackErr, this, std::placeholders::_1, std::placeholders::_2, _send_node));}
}void Session::WriteToSocketErr(const std::string& buf)
{_send_node = std::make_shared<MsgNode>(buf.c_str(), buf.size());_socket->async_write_some(boost::asio::buffer(buf.c_str(), buf.size()),std::bind(&Session::WriteCallBackErr, this, std::placeholders::_1, std::placeholders::_2, _send_node));
}
在以上代码中,先在WriteToSocketErr函数中创建一个消息结点,然后调用async_write_some将数据发送出去。当一次写操作结束之后。系统会将错误码和已写入数据的长度作为参数给回调函数。
if (node->_cur_len + bytes_transferred <= node->_total_len)
在回调函数中判断是否已经将数据全部发送出去了,如果没有,则更新_cur_len,然后继续执行异步发送操作
但是,以上代码逻辑中存在一个漏洞。在异步执行的逻辑中,代码调用的顺序是不确定的。
举个例子,当需要连续两次发送hello world
//连续两次调用
WriteToSocketErr("HelloWorld");
WriteToSocketErr("HelloWorld");
可能会发生第一次进行写入的时候只写入了Hello,这时按照逻辑需要执行回调函数,当在回调函数中发现数据并没有发送完全,于是再次调用async_write_some想继续写入World,但此时第二次调用WriteToSocketErr("HelloWorld");中,已经提前一步调用了async_write_some并将数据全部写完,然后才轮到第一次发送时的回调函数将剩下的World继续发完。这最终导致的结果时对方收到的数据为HelloHelloWorldWorld.
为了确保发送顺序的问题,可以在Session类中定义一个队列用来管理需要发送的结点和i一个布尔类型变量用来表示当前是否有数据正在被发送(初始化为false)
class Session{
public:Session(std::shared_ptr<boost::asio::ip::tcp::socket> socket):_socket(socket),_send_pending(false){}void WriteCallBack(const boost::system::error_code& ec, std::size_t bytes_transferred);void WriteToSocket(const std::string &buf);
private:std::queue<std::shared_ptr<MsgNode>> _send_queue;std::shared_ptr<asio::ip::tcp::socket> _socket;bool _send_pending;
};
此时再对写操作进行改进
void Session::WriteCallBack(const boost::system::error_code& ec, std::size_t bytes_transferred)
{if (ec.value() != 0){std::cout << "Error! Code is " << ec.value() << ".Message is " << ec.message() << std::endl;return;}std::shared_ptr<MsgNode>&node = _send_queue.front();node->_cur_len += bytes_transferred;if (node->_cur_len + bytes_transferred < node->_total_len)//还没有发送完{_socket->async_write_some(boost::asio::buffer(node->_msg + node->_cur_len, node->_total_len - bytes_transferred),std::bind(&WriteCallBack, this, std::placeholders::_1, std::placeholders::_2));return;}_send_queue.pop();if (_send_queue.empty()){_send_pending = false;}else{std::shared_ptr<MsgNode>& node = _send_queue.front();_socket->async_write_some(boost::asio::buffer(node->_msg, node->_total_len),std::bind(&Session::WriteCallBack, std::placeholders::_1, std::placeholders::_2));}
}void Session::WriteToSocket(const std::string& buf)
{_send_queue.push(std::make_shared<MsgNode>(buf.c_str(), buf.size()));if (_send_pending)//当前有消息正在发{return;}_socket->async_write_some(boost::asio::buffer(buf.c_str(), buf.size()),std::bind(&Session::WriteCallBack, this, std::placeholders::_1, std::placeholders::_2));_send_pending = true;
}
在WriteToSocket函数中,先不着急将数据立马发送出去,而是将数据节点放入到发送队列中,然后判断当前是否有数据正在发送,如果有就返回避免冲突;没有就直接调用async_write_some,在回调函数中,永远都是取出队首的结点进行发送,如果判断队首的元素数据已经发送完了就pop掉,并且检查队列中是否还有需要发送的元素:如果有,继续执行发送逻辑;如果没有就将_send_pending置为false表示当前已经没有数据正在发送了。
async_send
async_send的作用是直接将所有数据全部发送完,代码逻辑也比async_write_some要简单一些
void Session::WriteAllToSocket(const std::string& buf)
{_send_queue.push(std::make_shared<MsgNode>(buf.c_str(), buf.size()));if (_send_pending){return;}_socket->async_send(boost::asio::buffer(buf.c_str(), buf.size()),std::bind(&Session::WriteAllCallBck, this, std::placeholders::_1, std::placeholders::_2));_send_pending = true;
}void Session::WriteAllCallBck(const boost::system::error_code& ec, std::size_t bytes_tranferred)
{if (ec.value() != 0){std::cout << "Error! Code is " << ec.value() << ".Message is " << ec.message() << std::endl;return;}_send_queue.pop();if (_send_queue.empty()){_send_pending = false;}else{std::shared_ptr<MsgNode>& node = _send_queue.front();_socket->async_send(boost::asio::buffer(node->_msg, node->_total_len),std::bind(&Session::WriteAllCallBck, this, std::placeholders::_1, std::placeholders::_2));}
}
注意
async_send和async_write_some不要放在一起使用,因为async_send底层还是多次调用的async_write_some。如果一起使用,还是会引发数据冲突的问题
异步读操作
为了准备读操作,需要在Session类中添加数据结点_recv_node和一个布尔变量_recv_pending
class Session
{
public:Session(std::shared_ptr<boost::asio::ip::tcp::socket> socket):_socket(socket),_send_pending(false),_recv_pending(false){}void Connect(boost::asio::ip::tcp::endpoint& ep);void WriteCallBackErr(const boost::system::error_code& ec, std::size_t bytes_transferred, std::shared_ptr<MsgNode>);void WriteToSocketErr(const std::string& buf);void WriteCallBack(const boost::system::error_code& ec, std::size_t bytes_transferred);void WriteToSocket(const std::string& buf);void WriteAllToSocket(const std::string& buf);void WriteAllCallBck(const boost::system::error_code& ec, std::size_t bytes_tranferred);void ReadFromSocket();void ReadCallBack(const boost::system::error_code& ec, std::size_t bytes_transferred);void ReadAllFromSocket();void ReadAllCallBack(const boost::system::error_code& ec, std::size_t bytes_transferred);private:std::shared_ptr<boost::asio::ip::tcp::socket> _socket;std::shared_ptr<MsgNode> _send_node;std::queue<std::shared_ptr<MsgNode>> _send_queue;std::shared_ptr<MsgNode> _recv_node;bool _recv_pending;bool _send_pending;
};
由于接收的数据在TCP缓冲区里面已经是排好序了的,所以并不需要队列来维护顺序
async_read_some
其实异步读和异步写的逻辑类似,这里就不多介绍了
void Session::ReadFromSocket()
{if (_recv_pending){return;}_recv_node = std::make_shared<MsgNode>(RECVSIZE);_socket->async_read_some(boost::asio::buffer(_recv_node->_msg, _recv_node->_total_len),std::bind(&Session::ReadCallBack, this, std::placeholders::_1, std::placeholders::_2));_recv_pending = true;
}
void Session::ReadCallBack(const boost::system::error_code& ec, std::size_t bytes_transferred)
{if (ec.value() != 0){std::cout << "Error! Code is " << ec.value() << ".Message is " << ec.message() << std::endl;return;}if (_recv_node->_cur_len + bytes_transferred < _recv_node->_total_len){_recv_node->_cur_len += bytes_transferred;_socket->async_read_some(boost::asio::buffer(_recv_node->_msg + _recv_node->_cur_len, _recv_node->_total_len - _recv_node->_cur_len),std::bind(&Session::ReadCallBack, this, std::placeholders::_1, std::placeholders::_2));return;}_recv_pending = false;
}
async_receive
void Session::ReadCallBack(const boost::system::error_code& ec, std::size_t bytes_transferred)
{if (ec.value() != 0){std::cout << "Error! Code is " << ec.value() << ".Message is " << ec.message() << std::endl;return;}if (_recv_node->_cur_len + bytes_transferred < _recv_node->_total_len){_recv_node->_cur_len += bytes_transferred;_socket->async_read_some(boost::asio::buffer(_recv_node->_msg + _recv_node->_cur_len, _recv_node->_total_len - _recv_node->_cur_len),std::bind(&Session::ReadCallBack, this, std::placeholders::_1, std::placeholders::_2));return;}_recv_pending = false;
}void Session::ReadAllFromSocket()
{if (_recv_pending){return;}_recv_node = std::make_shared<MsgNode>(RECVSIZE);_socket->async_receive(boost::asio::buffer(_recv_node->_msg, _recv_node->_total_len),std::bind(&Session::ReadAllCallBack, this, std::placeholders::_1, std::placeholders::_2));_recv_pending = true;
}
void Session::ReadAllCallBack(const boost::system::error_code& ec, std::size_t bytes_transferred)
{if (ec.value() != 0){std::cout << "Error! Code is " << ec.value() << ".Message is " << ec.message() << std::endl;return;}_recv_pending = false;
}
相关文章:
【C++boost::asio网络编程】有关异步读写api的笔记
异步读写api 异步写操作async_write_someasync_send 异步读操作async_read_someasync_receive 定义一个Session类,主要是为了服务端专门为客户端服务创建的管理类 class Session { public:Session(std::shared_ptr<asio::ip::tcp::socket> socket);void Conn…...

Elasticsearch 的存储与查询
Elasticsearch 的存储与查询 在搜索系统领域,数据的存储与查询是两个最基础且至关重要的环节。Elasticsearch(ES) 在这两方面进行了深度优化,使其在关系型数据库或非关系型数据库中脱颖而出,成为搜索系统的首选。 映射 (Mapping) 映射 (Ma…...

008静态路由-特定主机路由
按照如上配置,用192.168.0.1 电脑ping 192.168.1.1 发现能够ping通 用192.168.0.1 电脑ping 192.168.2.1 发现不能ping通 这是因为192.168.0.1 和 192.168.1.1 使用的是同一个路由器R1。 192.168.0.1 和 192.168.2.1 通信需要先经过R1,再经过R2 …...

SystemUI 下拉框 Build 版本信息去掉
需求及场景 去掉SystemUI 下拉框 Build 版本信息 如下图所示:去掉 12 (SP1A.201812.016) 了解 去掉之前我们先了解它是个什么东西:其实就是一个Build RTM 信息显示 Android_12_build_SP1A.210812.016 修改文件 /frameworks/base/packages/Syste…...

【JS】栈内存、堆内存、事件机制区别、深拷贝、浅拷贝
js中,内存主要分为两种类型:栈内存(stack)、堆内存(heap),两种内存区域在存储和管理数据时有各自的特点和用途。 栈内存 访问顺序 栈是先进后出、后进先出的数据结构,栈内存是内存用…...

如何确保Java爬虫获得1688商品详情数据的准确性
在数字化商业时代,数据的价值日益凸显,尤其是对于电商平台而言。1688作为中国领先的B2B电子商务平台,提供了海量的商品数据接口,这些数据对于市场分析、库存管理、价格策略制定等商业活动至关重要。本文将详细介绍如何使用Java编写…...

【蓝牙通讯】iOS蓝牙开发基础介绍
1. iOS 蓝牙开发基础 在 iOS 中,蓝牙的操作主要是通过 Core Bluetooth 框架来实现。理解 Core Bluetooth 的基本组件和工作原理是学习 iOS 蓝牙开发的第一步。 核心知识点: Core Bluetooth 框架:这是 iOS 系统提供的专门用于蓝牙低功耗&am…...

Vue 90 ,Element 13 ,Vue + Element UI 中 el-switch 使用小细节解析,避免入坑(获取后端的数据类型自动转变)
目录 前言 在开发过程中,我们经常遇到一些看似简单的问题,但有时正是这些细节问题让我们头疼不已。今天,我就来和大家分享一个我在开发过程中遇到的 el-switch 使用的小坑,希望大家在使用时能够避免。 一. 问题背景 二. 问题分…...

echarts的双X轴,父级居中的相关配置
前言:折腾了一个星期,在最后一天中午,都快要放弃了,后来坚持下来,才有下面结果。 这个效果就相当是复合表头,第一行是子级,第二行是父级。 子级是奇数个时,父级label居中很简单&…...
)
RuoYi-Vue部署到Linux服务器(Jar+Nginx)
一、本地环境准备 源码下载、本地Jdk及Node.js环境安装,参考以下文章。 附:RuoYi-Vue下载与运行 二、服务器环境准备 1.安装Jdk 附:JDK8下载安装与配置环境变量(linux) 2.安装MySQL 附:MySQL8免安装版下载安装与配置(linux) 3.安装Redis 附:Redis下载安装与配置(…...

Linux firewalld常用命令
启动防火墙 systemctl start firewalld 停止防火墙 systemctl stop firewalld 防火墙开机自启动 systemctl enable firewalld 禁止防火墙开机自启动 systemctl disable firewalld 检查防火墙的状态 systemctl status firewalld 重新加载防火墙的配置 firewall-cmd -…...

Vue 组件之间的通信方式
Vue.js 中组件之间的通信是构建复杂应用的关键部分。以下是一些常见的Vue组件通信方式: 1. Props 和 Emit(父子组件通信) Props:父组件通过props向子组件传递数据。Emit:子组件通过emit触发事件,向父组件…...

el-select 修改样式
这样漂亮的页面,搭配的却是一个白色风格的下拉框 ,这也过于刺眼。。。 调整后样式为: 灯红酒绿总有人看着眼杂,但将风格统一终究是上上选择。下面来处理这个问题。 分为两部分。 第一部分:是修改触发框的样式 第二部…...

Java项目实战II基于微信小程序的亿家旺生鲜云订单零售系统的设计与实现(开发文档+数据库+源码)
目录 一、前言 二、技术介绍 三、系统实现 四、核心代码 五、源码获取 全栈码农以及毕业设计实战开发,CSDN平台Java领域新星创作者,专注于大学生项目实战开发、讲解和毕业答疑辅导。获取源码联系方式请查看文末 一、前言 随着移动互联网技术的不断…...
)
算法训练营day27(回溯算法03:组合总和,组合总和2,分割回文串)
第七章 回溯算法part03● 39. 组合总和 ● 40.组合总和II ● 131.分割回文串详细布置 39. 组合总和 本题是 集合里元素可以用无数次,那么和组合问题的差别 其实仅在于 startIndex上的控制题目链接/文章讲解:https://programmercarl.com/0039.%E7%BB%84%E…...

【青牛科技】D8331 流量计电路芯片,兼容 CTs,电阻分流器和罗氏线圈传感器
概述: D8331 系列超低功耗混合信号处理器由多种设备组成,具有针对电能表应用的不 同外围设备。它们集成了模拟前端和固定功能 DSP 解决方案与一个增强型 8052 单片 机核心,RTC 和 LCD 驱动程序集成在一个单一部件中。测量内核包括有功、无功…...

R语言森林生态系统结构、功能与稳定性分析与可视化实践高级应用
在生态学研究中,森林生态系统的结构、功能与稳定性是核心研究内容之一。这些方面不仅关系到森林动态变化和物种多样性,还直接影响森林提供的生态服务功能及其应对环境变化的能力。森林生态系统的结构主要包括物种组成、树种多样性、树木的空间分布与密度…...

【IntelliJ IDEA 中 Run Dashboard 不显示端口号问题解决办法】
IntelliJ IDEA 中 Run Dashboard 不显示端口号问题解决办法 解决 IntelliJ IDEA Run Dashboard 不显示端口号问题方法一:删除临时文件方法二:设置启动参数方法三:编辑 Run/Debug Configurations方法四:检查端口占用情况方法五&…...

idea中git的将A分支某次提交记录合并到B分支
一 实操案例 1.1 背景描述 在开发过程中,有时候需要将A分支某次提交记录功能合并到B分支上。主要原理用到git的cherry pick功能。 1.2 案例 实现的功能: master分支的11.24提交记录合并到feature_A分支; 1.master分支提交的记录 2.fea…...

华为关键词覆盖应用市场ASO优化覆盖技巧
在我国的消费者群体当中,华为的品牌形象较高,且产品质量过硬,因此用户基数也大。与此同时,随着影响力的增大,华为不断向外扩张,也逐渐成为了海外市场的香饽饽。作为开发者和运营者,我们要认识到…...

19c补丁后oracle属主变化,导致不能识别磁盘组
补丁后服务器重启,数据库再次无法启动 ORA01017: invalid username/password; logon denied Oracle 19c 在打上 19.23 或以上补丁版本后,存在与用户组权限相关的问题。具体表现为,Oracle 实例的运行用户(oracle)和集…...

.Net框架,除了EF还有很多很多......
文章目录 1. 引言2. Dapper2.1 概述与设计原理2.2 核心功能与代码示例基本查询多映射查询存储过程调用 2.3 性能优化原理2.4 适用场景 3. NHibernate3.1 概述与架构设计3.2 映射配置示例Fluent映射XML映射 3.3 查询示例HQL查询Criteria APILINQ提供程序 3.4 高级特性3.5 适用场…...

vue3 定时器-定义全局方法 vue+ts
1.创建ts文件 路径:src/utils/timer.ts 完整代码: import { onUnmounted } from vuetype TimerCallback (...args: any[]) > voidexport function useGlobalTimer() {const timers: Map<number, NodeJS.Timeout> new Map()// 创建定时器con…...

CRMEB 框架中 PHP 上传扩展开发:涵盖本地上传及阿里云 OSS、腾讯云 COS、七牛云
目前已有本地上传、阿里云OSS上传、腾讯云COS上传、七牛云上传扩展 扩展入口文件 文件目录 crmeb\services\upload\Upload.php namespace crmeb\services\upload;use crmeb\basic\BaseManager; use think\facade\Config;/*** Class Upload* package crmeb\services\upload* …...

学习STC51单片机32(芯片为STC89C52RCRC)OLED显示屏2
每日一言 今天的每一份坚持,都是在为未来积攒底气。 案例:OLED显示一个A 这边观察到一个点,怎么雪花了就是都是乱七八糟的占满了屏幕。。 解释 : 如果代码里信号切换太快(比如 SDA 刚变,SCL 立刻变&#…...
ABAP设计模式之---“简单设计原则(Simple Design)”
“Simple Design”(简单设计)是软件开发中的一个重要理念,倡导以最简单的方式实现软件功能,以确保代码清晰易懂、易维护,并在项目需求变化时能够快速适应。 其核心目标是避免复杂和过度设计,遵循“让事情保…...

【生成模型】视频生成论文调研
工作清单 上游应用方向:控制、速度、时长、高动态、多主体驱动 类型工作基础模型WAN / WAN-VACE / HunyuanVideo控制条件轨迹控制ATI~镜头控制ReCamMaster~多主体驱动Phantom~音频驱动Let Them Talk: Audio-Driven Multi-Person Conversational Video Generation速…...
大模型——基于Docker+DeepSeek+Dify :搭建企业级本地私有化知识库超详细教程
基于Docker+DeepSeek+Dify :搭建企业级本地私有化知识库超详细教程 下载安装Docker Docker官网:https://www.docker.com/ 自定义Docker安装路径 Docker默认安装在C盘,大小大概2.9G,做这行最忌讳的就是安装软件全装C盘,所以我调整了下安装路径。 新建安装目录:E:\MyS…...

【版本控制】GitHub Desktop 入门教程与开源协作全流程解析
目录 0 引言1 GitHub Desktop 入门教程1.1 安装与基础配置1.2 核心功能使用指南仓库管理日常开发流程分支管理 2 GitHub 开源协作流程详解2.1 Fork & Pull Request 模型2.2 完整协作流程步骤步骤 1: Fork(创建个人副本)步骤 2: Clone(克隆…...
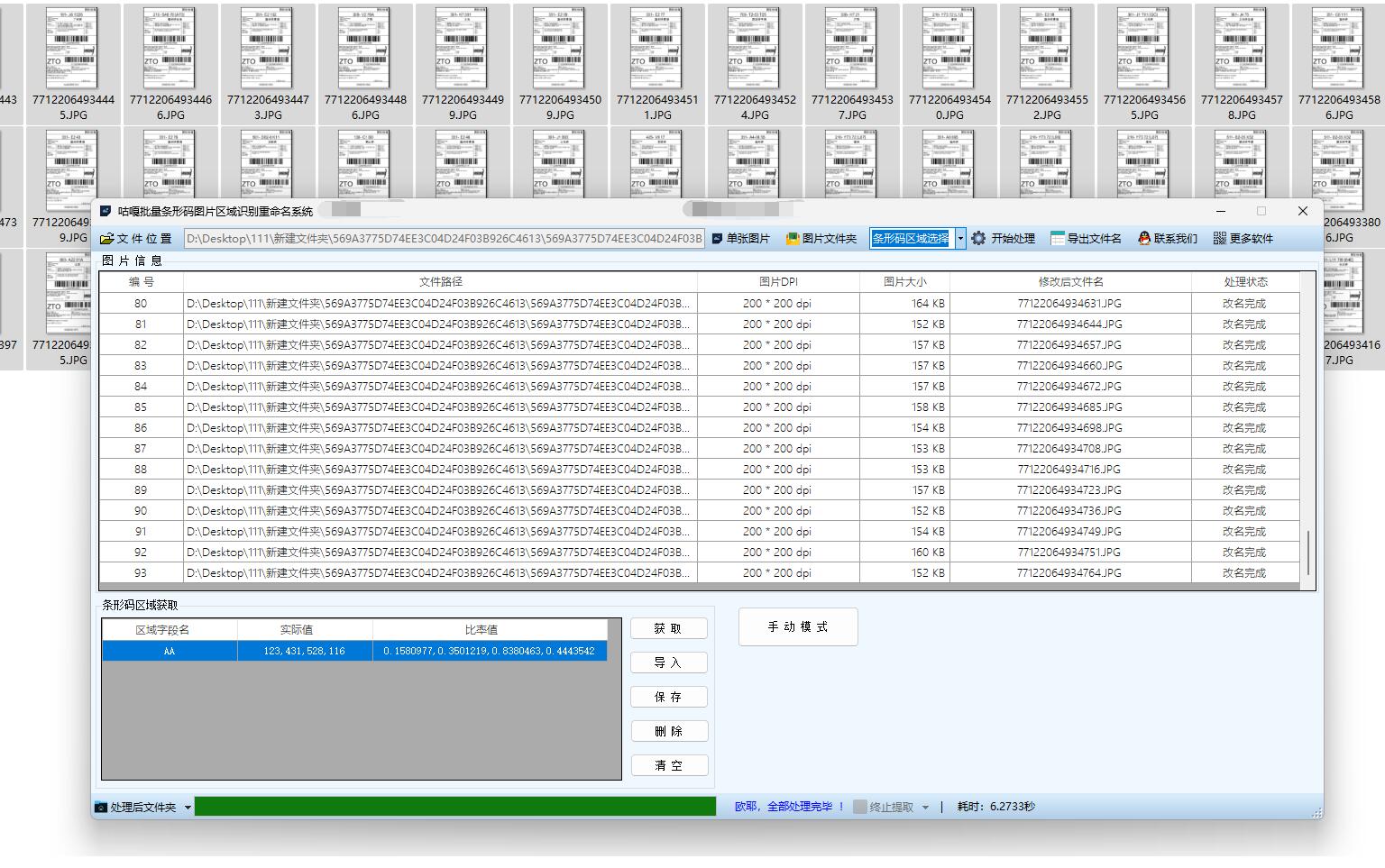
【工具教程】多个条形码识别用条码内容对图片重命名,批量PDF条形码识别后用条码内容批量改名,使用教程及注意事项
一、条形码识别改名使用教程 打开软件并选择处理模式:打开软件后,根据要处理的文件类型,选择 “图片识别模式” 或 “PDF 识别模式”。如果是处理包含条形码的 PDF 文件,就选择 “PDF 识别模式”;若是处理图片文件&…...