【六足机器人】01功能开发
包含:WIFI模块、GPS模块、语言模块、调试信息接口。
一、硬件连接
huart4( PA0、 PA1 )与GPS模块连接。
huart3(PB10、PB11)与ESP8266模块连接。
huart2( PA2、 PA3 )与语音模块连接。
huart1(PB14、PB15)与PC端连接,用于打印调试信息。
二、串口配置代码
2.1 开启中断:
开启串口的接收中断 or 空闲中断。
/* 该函数会开启接收中断:标志位UART_IT_RXNE,并且设置接收缓冲以及接收缓冲接收最大数据量 */HAL_UART_Receive_IT(&huart1, (uint8_t *)g_rx_buffer, 1);// __HAL_UART_ENABLE_IT(&huart3, UART_IT_IDLE);// HAL_UART_Receive_DMA(&huart3,(uint8_t*)ATCmdRxBuffer,ATCmdRxBuffe_MAX_SIZE); //重新启动DMA接收__HAL_UART_ENABLE_IT(&huart2, UART_IT_IDLE); //使能IDLE中断 HAL_UART_Receive_DMA(&huart2, voiceBuf, voiceBuf_MAX_SIZE);
//HAL_UART_Receive_DMA(&huart3, (uint8_t *)g_rx_buffer, 1);__HAL_UART_ENABLE_IT(&huart3, UART_IT_RXNE); /* 使能UART接收中断 */__HAL_UART_ENABLE_IT(&huart3, UART_IT_IDLE); /* 使能UART总线空闲中断 */2.2 中断函数:
/* USER CODE BEGIN 1 */void HAL_UART_MyIdleCpltCallback(UART_HandleTypeDef *huart)
{if (huart->Instance == USART2){Voice_Length = voiceBuf_MAX_SIZE - __HAL_DMA_GET_COUNTER(&hdma_usart2_rx);flag_voice = 1; // 设置接收完成标志}
}void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) // 串口接收完成中断回调函数
{if (huart->Instance == USART1) /* 如果是串口1 */{if ((myHexapodRx.recv_end_flag & 0x8000) == 0) /* 接收未完成 1000 0000 0000 0000 */ {if (myHexapodRx.recv_end_flag & 0x4000) /* 接收到了0x0D /r 0100 0000 0000 0000 */{if (g_rx_buffer[0] != 0x0a) /* \n 0x0A*/{myHexapodRx.recv_end_flag = 0; /* 接收错误,重新开始 */}else{myHexapodRx.recv_end_flag |= 0x8000; /* 接收完成了 */}}else /* 还没收到0X0D */{if (g_rx_buffer[0] == 0x0d){myHexapodRx.recv_end_flag |= 0x4000;} else{ //0011 1111 1111 1111myHexapodRx.HexapodRxBuf[myHexapodRx.recv_end_flag & 0X3FFF] = g_rx_buffer[0];myHexapodRx.recv_end_flag++;if (myHexapodRx.recv_end_flag > (HexapodRxBuf_MAX_SIZE - 1)){myHexapodRx.recv_end_flag = 0; /* 接收数据错误,重新开始接收 */}}}}HAL_UART_Receive_IT(&huart1, (uint8_t *)g_rx_buffer, 1);}if (huart->Instance == USART2){HAL_UART_Receive_DMA(&huart2, (uint8_t *)voiceBuf, voiceBuf_MAX_SIZE);}三、功能模块
3.1 ESP8266模块
3.1.1 atk_ESP8266D
atk_mw8266d_usart.c
#include "atk_mw8266d_usart.h"
#include "usart.h"
#include <stdarg.h>
#include <stdio.h>
#include <string.h>g_uart_rx_frame myATCmdRx = {0};static uint8_t g_uart_tx_buf[ATK_MW8266D_UART_TX_BUF_SIZE]; /* ATK-MW8266D UART发送缓冲 *//*** @brief ATK-MW8266D UART printf* @param fmt: 待发送的数据* @retval 无*/
void atk_mw8266d_uart_printf(char *fmt, ...)
{va_list ap;uint16_t len;va_start(ap, fmt);vsprintf((char *)g_uart_tx_buf, fmt, ap);va_end(ap);len = strlen((const char *)g_uart_tx_buf);HAL_UART_Transmit(&g_uart_handle, g_uart_tx_buf, len, HAL_MAX_DELAY);//HAL_UART_Transmit_IT(&g_uart_handle, g_uart_tx_buf, sizeof(g_uart_tx_buf));
}/*** @brief ATK-MW8266D UART重新开始接收数据* @param 无* @retval 无*/
void atk_mw8266d_uart_rx_restart(void)
{myATCmdRx.sta.len = 0;myATCmdRx.sta.finsh = 0;
}/*** @brief 获取ATK-MW8266D UART接收到的一帧数据* @param 无* @retval NULL: 未接收到一帧数据* 其他: 接收到的一帧数据*/
uint8_t *atk_mw8266d_uart_rx_get_frame(void)
{if (myATCmdRx.sta.finsh == 1){myATCmdRx.buf[myATCmdRx.sta.len] = '\0';//printf("接收到的数据: %s\r\n", myATCmdRx.buf);return myATCmdRx.buf; }else{return NULL;}
}/*** @brief 获取ATK-MW8266D UART接收到的一帧数据的长度* @param 无* @retval 0 : 未接收到一帧数据* 其他: 接收到的一帧数据的长度*/
uint16_t atk_mw8266d_uart_rx_get_frame_len(void)
{if (myATCmdRx.sta.finsh == 1){return myATCmdRx.sta.len;}else{return 0;}
}/*** @brief ATK-MW8266D UART初始化* @param baudrate: UART通讯波特率* @retval 无*/
void atk_mw8266d_uart_init(uint32_t baudrate)
{g_uart_handle.Instance = ATK_MW8266D_UART_INTERFACE; /* ATK-MW8266D UART */g_uart_handle.Init.BaudRate = baudrate; /* 波特率 */g_uart_handle.Init.WordLength = UART_WORDLENGTH_8B; /* 数据位 */g_uart_handle.Init.StopBits = UART_STOPBITS_1; /* 停止位 */g_uart_handle.Init.Parity = UART_PARITY_NONE; /* 校验位 */g_uart_handle.Init.Mode = UART_MODE_TX_RX; /* 收发模式 */g_uart_handle.Init.HwFlowCtl = UART_HWCONTROL_NONE; /* 无硬件流控 */g_uart_handle.Init.OverSampling = UART_OVERSAMPLING_16; /* 过采样 */HAL_UART_Init(&g_uart_handle); /* 使能ATK-MW8266D UART* HAL_UART_Init()会调用函数HAL_UART_MspInit()* 该函数定义在文件usart.c中*/
}/*** @brief ATK-MW8266D UART中断回调函数* @param 无* @retval 无*/
void ATK_MW8266D_UART_IRQHandler(void)
{uint8_t tmp;if (__HAL_UART_GET_FLAG(&g_uart_handle, UART_FLAG_ORE) != RESET) /* UART接收过载错误中断 */{__HAL_UART_CLEAR_OREFLAG(&g_uart_handle); /* 清除接收过载错误中断标志 */(void)g_uart_handle.Instance->ISR; /* I先读SR寄存器,再读RDR寄存器 */(void)g_uart_handle.Instance->RDR;}if (__HAL_UART_GET_FLAG(&g_uart_handle, UART_FLAG_RXNE) != RESET) /* UART接收中断 */{HAL_UART_Receive(&g_uart_handle, &tmp, 1, 1000); /* UART接收数据 */if (myATCmdRx.sta.len < (ATK_MW8266D_UART_RX_BUF_SIZE - 1)) /* 判断UART接收缓冲是否溢出* 留出一位给结束符'\0'*/{myATCmdRx.buf[myATCmdRx.sta.len] = tmp; /* 将接收到的数据写入缓冲 */myATCmdRx.sta.len++; /* 更新接收到的数据长度 */}else /* UART接收缓冲溢出 */{myATCmdRx.sta.len = 0; /* 覆盖之前收到的数据 */myATCmdRx.buf[myATCmdRx.sta.len] = tmp; /* 将接收到的数据写入缓冲 */myATCmdRx.sta.len++; /* 更新接收到的数据长度 */}}if (__HAL_UART_GET_FLAG(&g_uart_handle, UART_FLAG_IDLE) != RESET) /* UART总线空闲中断 */{myATCmdRx.sta.finsh = 1; /* 标记帧接收完成 */__HAL_UART_CLEAR_IDLEFLAG(&g_uart_handle); /* 清除UART总线空闲中断 */}
}
atk_mw8266d_usart.h
#ifndef __ATK_MW8266D_UART_H
#define __ATK_MW8266D_UART_H#include "main.h"/* 引脚定义 */
#define ATK_MW8266D_UART_TX_GPIO_PORT GPIOB
#define ATK_MW8266D_UART_TX_GPIO_PIN GPIO_PIN_10
#define ATK_MW8266D_UART_TX_GPIO_AF GPIO_AF7_USART2
#define ATK_MW8266D_UART_TX_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOB_CLK_ENABLE(); }while(0) /* PA口时钟使能 */#define ATK_MW8266D_UART_RX_GPIO_PORT GPIOB
#define ATK_MW8266D_UART_RX_GPIO_PIN GPIO_PIN_11
#define ATK_MW8266D_UART_RX_GPIO_AF GPIO_AF7_USART2
#define ATK_MW8266D_UART_RX_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOB_CLK_ENABLE(); }while(0) /* PA口时钟使能 */#define ATK_MW8266D_UART_INTERFACE USART3
#define ATK_MW8266D_UART_IRQn USART3_IRQn
//#define ATK_MW8266D_UART_IRQHandler USART3_IRQHandler
#define ATK_MW8266D_UART_CLK_ENABLE() do{ __HAL_RCC_USART3_CLK_ENABLE(); }while(0) /* USART3 时钟使能 *//* UART收发缓冲大小 */
#define ATK_MW8266D_UART_RX_BUF_SIZE 128
#define ATK_MW8266D_UART_TX_BUF_SIZE 64
#define g_uart_handle huart3typedef struct
{uint8_t buf[ATK_MW8266D_UART_RX_BUF_SIZE]; /* 帧接收缓冲 */struct{uint16_t len : 15; /* 帧接收长度,sta[14:0] */uint16_t finsh : 1; /* 帧接收完成标志,sta[15] */} sta; /* 帧状态信息 */
} g_uart_rx_frame; /* ATK-MW8266D UART接收帧缓冲信息结构体 */extern g_uart_rx_frame myATCmdRx;/* 操作函数 */
void atk_mw8266d_uart_printf(char *fmt, ...); /* ATK-MW8266D UART printf */
void atk_mw8266d_uart_rx_restart(void); /* ATK-MW8266D UART重新开始接收数据 */
uint8_t *atk_mw8266d_uart_rx_get_frame(void); /* 获取ATK-MW8266D UART接收到的一帧数据 */
uint16_t atk_mw8266d_uart_rx_get_frame_len(void); /* 获取ATK-MW8266D UART接收到的一帧数据的长度 */
void atk_mw8266d_uart_init(uint32_t baudrate); /* ATK-MW8266D UART初始化 */
void ATK_MW8266D_UART_IRQHandler(void);
#endif
3.1.2 myTask_atk8266D
myTask_atk8266D.c
#include "myTask_ATK8266D.h"
#include "atk_mw8266d.h"
#include "usart.h"
#include "main.h"
#include "stdio.h"
#include "string.h"
#include "led.h"#define DEMO_WIFI_SSID "guilin88"
#define DEMO_WIFI_PWD "12345678"
#define DEMO_TCP_SERVER_IP "192.168.96.95"
#define DEMO_TCP_SERVER_PORT "6688"void myTask_ATK8266D(void)
{uint8_t ret;//char ip_buf[16];/* 初始化ATK-MW8266D */printf("开始连接AP.......\r\n");ret = atk_mw8266d_init(115200);if (ret != 0){printf("ATK-MW8266D init failed!\r\n");while (1){LED_R_Toggle;delay_ms(200);}}
// printf("正在恢复出厂设置...\r\n");
// while (atk_mw8266d_restore())
// {
// color_debug();
// }printf("正在进行AT测试...\r\n");while (atk_mw8266d_at_test()){color_debug();}
// printf("正在设置波特率...\r\n");
// ret = atk_mw8266d_send_at_cmd("AT+UART=115200,8,1,0,0", "OK", 500);
// while (ret != 0)
// {
// color_debug();
// }printf("正在设置Station模式...\r\n");while (atk_mw8266d_set_mode(1)){color_debug();}
// printf("正在进行软件复位...\r\n");
// while (atk_mw8266d_sw_reset())
// {
// color_debug();
// }
// printf("关闭回显功能...\r\n");
// while (atk_mw8266d_ate_config(0))
// {
// color_debug();
// }printf("正在连接WIFI...\r\n");while (atk_mw8266d_join_ap(DEMO_WIFI_SSID, DEMO_WIFI_PWD)){printf("Error to connect tcp server! 2秒后重新连接!\r\n");color_debug();}
// printf("获取IP地址中...\r\n");
// while (atk_mw8266d_get_ip(ip_buf))
// {
// color_debug();
// }// printf("IP: %s\r\n", ip_buf);/* 连接TCP服务器 */printf("正在连接TCP服务器...\r\n");while (atk_mw8266d_connect_tcp_server(DEMO_TCP_SERVER_IP, DEMO_TCP_SERVER_PORT)){printf("Error to connect tcp server! 2秒后重新连接!\r\n");color_debug();}/* 进入透传 */printf("进入透传...\r\n");while (atk_mw8266d_enter_unvarnished()){color_debug();}printf("成功进入透传\r\n");atk_mw8266d_uart_rx_restart(); // 重新开始接收数据
}
myTask_atk8266D.h
#ifndef _MYTASK_ATK8266D_H
#define _MYTASK_ATK8266D_Hvoid myTask_ATK8266D(void);#endif
3.2 GPS模块
3.2.1 ATGM336H
ATGM336H.c
#include "ATGM336H.h"
#include "main.h"
#include "usart.h"
#include "string.h"
#include "stdio.h"char rxdatabufer;
u16 point1 = 0;_SaveData Save_Data;
LatitudeAndLongitude_s g_LatAndLongData =
{.E_W = 0,.N_S = 0,.latitude = 0.0,.longitude = 0.0
};// 串口1中断服务程序
// 注意,读取USARTx->SR能避免莫名其妙的错误
char USART_RX_BUF[USART_REC_LEN]; // 接收缓冲,最大USART_REC_LEN个字节.
uint8_t uart_A_RX_Buff;// 接收状态
// bit15, 接收完成标志
// bit14, 接收到0x0d
// bit13~0, 接收到的有效字节数目
u16 USART_RX_STA=0; // 接收状态标记void atgm336h_init(void)
{clrStruct();HAL_UART_Receive_IT(&huart4, &uart_A_RX_Buff, 1);
}//GPS中断回调函数,需要放入串口接收中断中
void atgm336h_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{if(huart->Instance == UART4){
// printf("%c", uart_A_RX_Buff);if(uart_A_RX_Buff == '$'){point1 = 0;}USART_RX_BUF[point1++] = uart_A_RX_Buff;if(USART_RX_BUF[0] == '$' && USART_RX_BUF[4] == 'M' && USART_RX_BUF[5] == 'C') //确定是否收到"GPRMC/GNRMC"这一帧数据{if(uart_A_RX_Buff == '\n'){memset(Save_Data.GPS_Buffer, 0, GPS_Buffer_Length); //清空memcpy(Save_Data.GPS_Buffer, USART_RX_BUF, point1); //保存数据Save_Data.isGetData = true;point1 = 0;memset(USART_RX_BUF, 0, USART_REC_LEN); //清空}}if(point1 >= USART_REC_LEN){point1 = USART_REC_LEN;}HAL_UART_Receive_IT(&huart4, &uart_A_RX_Buff, 1);}
}u8 Hand(char *a) // 串口命令识别函数
{if(strstr(USART_RX_BUF, a)!=NULL)return 1;elsereturn 0;
}void CLR_Buf(void) // 串口缓存清理
{memset(USART_RX_BUF, 0, USART_REC_LEN); //清空point1 = 0;
}void clrStruct(void)
{Save_Data.isGetData = false;Save_Data.isParseData = false;Save_Data.isUsefull = false;memset(Save_Data.GPS_Buffer, 0, GPS_Buffer_Length); //清空memset(Save_Data.UTCTime, 0, UTCTime_Length);memset(Save_Data.latitude, 0, latitude_Length);memset(Save_Data.N_S, 0, N_S_Length);memset(Save_Data.longitude, 0, longitude_Length);memset(Save_Data.E_W, 0, E_W_Length);
}void errorLog(int num)
{while (1){printf("ERROR%d\r\n",num);}
}void parseGpsBuffer(void)
{char *subString;char *subStringNext;char i = 0;uint16_t Number=0, Integer=0, Decimal=0;if (Save_Data.isGetData){Save_Data.isGetData = false;printf("**************\r\n");printf("%s\r\n", Save_Data.GPS_Buffer);for (i = 0 ; i <= 6 ; i++){if (i == 0){if ((subString = strstr(Save_Data.GPS_Buffer, ",")) == NULL)errorLog(1); //解析错误}else{subString++;if ((subStringNext = strstr(subString, ",")) != NULL){char usefullBuffer[2];switch(i){case 1:memcpy(Save_Data.UTCTime, subString, subStringNext - subString);break; //获取UTC时间case 2:memcpy(usefullBuffer, subString, subStringNext - subString);break; //获取UTC时间case 3:memcpy(Save_Data.latitude, subString, subStringNext - subString);break; //获取纬度信息case 4:memcpy(Save_Data.N_S, subString, subStringNext - subString);break; //获取N/Scase 5:memcpy(Save_Data.longitude, subString, subStringNext - subString);break; //获取经度信息case 6:memcpy(Save_Data.E_W, subString, subStringNext - subString);break; //获取E/Wdefault:break;}subString = subStringNext;Save_Data.isParseData = true;if(usefullBuffer[0] == 'A')Save_Data.isUsefull = true;else if(usefullBuffer[0] == 'V')Save_Data.isUsefull = false;}else{errorLog(2); //解析错误}}}if (Save_Data.isParseData){if(Save_Data.isUsefull){// 获取 N/S 和 E/Wg_LatAndLongData.N_S = Save_Data.N_S[0];g_LatAndLongData.E_W = Save_Data.E_W[0];// 获取纬度for(uint8_t i=0; i<9; i++){if(i<2){Number *= 10;Number += Save_Data.latitude[i]-'0';}else if(i<4){Integer *= 10;Integer += Save_Data.latitude[i]-'0';}else if(i==4);else if(i<9){Decimal *= 10;Decimal += Save_Data.latitude[i]-'0';}}g_LatAndLongData.latitude = 1.0*Number + (1.0*Integer+1.0*Decimal/10000)/60;Number = 0;Integer = 0;Decimal = 0;// 获取经度for(uint8_t i=0; i<10; i++){if(i<3){Number *= 10;Number += Save_Data.longitude[i]-'0';}else if(i<5){Integer *= 10;Integer += Save_Data.longitude[i]-'0';}else if(i==5);else if(i<10){Decimal *= 10;Decimal += Save_Data.longitude[i]-'0';}}g_LatAndLongData.longitude = 1.0*Number + (1.0*Integer+1.0*Decimal/10000)/60;}}}
}void printGpsBuffer(void)
{if (Save_Data.isParseData){Save_Data.isParseData = false;printf("Save_Data.UTCTime = %s\r\n", Save_Data.UTCTime);if(Save_Data.isUsefull){Save_Data.isUsefull = false;printf("Save_Data.latitude = %s\r\n", Save_Data.latitude);printf("Save_Data.N_S = %s", Save_Data.N_S);printf("Save_Data.longitude = %s", Save_Data.longitude);printf("Save_Data.E_W = %s\r\n", Save_Data.E_W);printf("latitude: %c,%.4f\r\n", g_LatAndLongData.N_S, g_LatAndLongData.latitude);printf("longitude: %c,%.4f\r\n", g_LatAndLongData.E_W, g_LatAndLongData.longitude);}else{printf("GPS DATA is not usefull!\r\n");}}
}
ATGM336H.h
#ifndef __ATGM336H_H
#define __ATGM336H_H#include "usart.h"
#include "sys.h"
// #include "stdbool.h"#define USART_REC_LEN 200 // 定义最大接收字节数 200
#define EN_USART1_RX 1 // 使能(1)/禁止(0)串口1接收#define false 0
#define true 1// 定义数组长度
#define GPS_Buffer_Length 80
#define UTCTime_Length 11
#define latitude_Length 11
#define N_S_Length 2
#define longitude_Length 12
#define E_W_Length 2typedef struct SaveData
{char GPS_Buffer[GPS_Buffer_Length];char isGetData; // 是否获取到GPS数据char isParseData; // 是否解析完成char UTCTime[UTCTime_Length]; // UTC时间char latitude[latitude_Length]; // 纬度char N_S[N_S_Length]; // N/Schar longitude[longitude_Length]; // 经度char E_W[E_W_Length]; // E/Wchar isUsefull; // 定位信息是否有效
} _SaveData;// 经纬度数据
typedef struct _LatitudeAndLongitude_s
{float latitude; // 纬度float longitude; // 经度char N_S; // 北南char E_W; // 东西
} LatitudeAndLongitude_s;extern char rxdatabufer;
extern u16 point1;
extern _SaveData Save_Data;
extern LatitudeAndLongitude_s g_LatAndLongData;void atgm336h_UART_RxCpltCallback(UART_HandleTypeDef *huart);
void atgm336h_init(void); // 初始化
void clrStruct(void); // 清除结构体数据
void parseGpsBuffer(void); // 解包函数
void printGpsBuffer(void); // 打印函数#endif // __ATGM336H_H
3.2.2 myTask_GPS
myTask_GPS.c
#include "myTask_GPS.h"
#include "stdio.h"
#include "ATGM336H.h"void myTask_GPS(void){atgm336h_init();while (1){if (Save_Data.isParseData){Save_Data.isParseData = false;if(Save_Data.isUsefull){Save_Data.isUsefull = false;printf("latitude: %c,%.4f\r\n", g_LatAndLongData.N_S, g_LatAndLongData.latitude);printf("longitude: %c,%.4f\r\n", g_LatAndLongData.E_W, g_LatAndLongData.longitude);}else{printf("GPS DATA is not usefull!\r\n");}}HAL_Delay(30);}
}3.3 语音模块
直接使用串口2接收指令信息。
3.4 串口重定义
支持printf函数,便于打印调试信息到PC端,适配STM32H7系列。其他系列需要查看不同的芯片手册。
/******************************************************************************************/
/* 加入以下代码, 支持printf函数, 而不需要选择use MicroLIB */#if 1
#if (__ARMCC_VERSION >= 6010050) /* 使用AC6编译器时 */
__asm(".global __use_no_semihosting\n\t"); /* 声明不使用半主机模式 */
__asm(".global __ARM_use_no_argv \n\t"); /* AC6下需要声明main函数为无参数格式,否则部分例程可能出现半主机模式 */#else
/* 使用AC5编译器时, 要在这里定义__FILE 和 不使用半主机模式 */
#pragma import(__use_no_semihosting)struct __FILE
{int handle;/* Whatever you require here. If the only file you are using is *//* standard output using printf() for debugging, no file handling *//* is required. */
};#endif/* 不使用半主机模式,至少需要重定义_ttywrch\_sys_exit\_sys_command_string函数,以同时兼容AC6和AC5模式 */
int _ttywrch(int ch)
{ch = ch;return ch;
}/* 定义_sys_exit()以避免使用半主机模式 */
void _sys_exit(int x)
{x = x;
}char *_sys_command_string(char *cmd, int len)
{return NULL;
}/* FILE 在 stdio.h里面定义. */
FILE __stdout;/* 重定义fputc函数, printf函数最终会通过调用fputc输出字符串到串口 */
int fputc(int ch, FILE *f)
{while ((USART1->ISR & 0X40) == 0); /* 等待上一个字符发送完成 */USART1->TDR = (uint8_t)ch; /* 将要发送的字符 ch 写入到DR寄存器 */return ch;
}
#endif
/***********************************************END*******************************************/相关文章:

【六足机器人】01功能开发
包含:WIFI模块、GPS模块、语言模块、调试信息接口。 一、硬件连接 huart4( PA0、 PA1 )与GPS模块连接。 huart3(PB10、PB11)与ESP8266模块连接。 huart2( PA2、 PA3 )与语音模块连接。 hu…...

notepad++安装教程(超详细)
1.下载地址(可以私信博主) https://notepad-plus.en.softonic.com/download 2.解压安装...

创建简单的 PL/pgSQL 存储过程
文章目录 创建简单的 PL/pgSQL 存储过程CREATE OR REPLACE FUNCTIONadd_two_numbers(a integer, b integer)RETURNS integerAS$$ ... $$函数体LANGUAGE plpgsql 创建带有 IN 和 OUT 参数的存储过程创建修改数据的存储过程创建带有异常处理的复杂存储过程 在 PostgreSQL 中&…...

Java项目实战II基于微信小程序的无中介租房系统(开发文档+数据库+源码)
目录 一、前言 二、技术介绍 三、系统实现 四、核心代码 五、源码获取 全栈码农以及毕业设计实战开发,CSDN平台Java领域新星创作者,专注于大学生项目实战开发、讲解和毕业答疑辅导。 一、前言 随着城市化进程的加速,租房市场日益繁荣&a…...

Node.js实现WebSocket教程
Node.js实现WebSocket教程 1. WebSocket简介 WebSocket是一种在单个TCP连接上提供全双工通信的协议,允许服务器和客户端之间进行实时、双向通信。本教程将详细讲解如何在Node.js中实现WebSocket。 2. 技术选型 我们将使用ws库来实现WebSocket服务器,…...

Docker Compose实战一( 轻松部署 Nginx)
通过过前面的文章(Docker Compose基础语法)你已经掌握基本语法和常用指令认识到Docker Compose作为一款强大工具的重要性,它极大地简化了多容器Docker应用程序的部署与管理流程。本文将详细介绍如何使用 Docker Compose 部署 Nginx࿰…...

hive分区分桶、数据倾斜总结
一、hive的基本概念 hive是一个构建在hadoop上的数据仓库工具,可以将结构化的数据文件映射为一张数据库表并提供数据查询功能 二、hive的特点 (1)数据是存储在hdfs上 (2)底层是将sql转换为MapReduce任务进行计算 …...

unity打包到安卓帧率降低
这个问题遇到过很多次了我的做法就是直接设置Application.targetFrameRate60 参考...

【Python3】装饰器 自动更新缓存
自动更新缓存的需求场景 在某些应用中,我们可能需要定期从外部数据源(如 Redis 或者远程接口)拉取数据,并将其缓存在内存中。当有其他代码需要访问这些数据时,可以立刻从内存获取最新数据,而无需每次都进行…...

通过EPEL 仓库,在 CentOS 7 上安装 OpenResty
通过EPEL 仓库,在 CentOS 7 上安装 OpenResty 通过EPEL 仓库,在 CentOS 7 上安装 OpenResty步骤 1: 安装 EPEL 仓库步骤 2: 安装 OpenResty步骤 3: 启动 OpenResty步骤 4: 设置开机自启步骤 5: 验证安装说明 通过EPEL 仓库,在 CentOS 7 上安装…...

[RabbitMQ] RabbitMQ常见应用问题
🌸个人主页:https://blog.csdn.net/2301_80050796?spm1000.2115.3001.5343 🏵️热门专栏: 🧊 Java基本语法(97平均质量分)https://blog.csdn.net/2301_80050796/category_12615970.html?spm1001.2014.3001.5482 🍕 Collection与…...

每日速记10道java面试题13-MySQL篇
其他资料 每日速记10道java面试题01-CSDN博客 每日速记10道java面试题02-CSDN博客 每日速记10道java面试题03-CSDN博客 每日速记10道java面试题04-CSDN博客 每日速记10道java面试题05-CSDN博客 每日速记10道java面试题06-CSDN博客 每日速记10道java面试题07-CSDN博客 每…...
)
乐鑫科技嵌入式面试题及参考答案(3万字长文)
嵌入式开发为什么用 C 语言,而不用 C++ 语言? 在嵌入式开发中,C 语言被广泛使用而 C++ 相对少用有以下一些原因。 首先,C 语言具有更高的效率。嵌入式系统通常资源受限,包括处理器速度、内存容量等。C 语言的代码生成效率高,能够生成紧凑的机器码,占用较少的内存空间和处…...

Leetcode 每日一题 56.合并区间
目录 问题描述 示例 示例 1 示例 2 问题分析 算法设计 步骤 1:排序 步骤 2:合并区间 步骤 3:返回结果 过题图片 代码实现 复杂度分析 题目链接 结语 问题描述 给定一个区间数组 intervals,其中每个区间由两个整数 s…...

【Vue】v-model、ref获取DOM
目录 v-moel v-model的原理 v-model用在组件标签上 方式 defineModel()简写 ref属性 获取原生DOM 获取组件实例 nextTick() v-moel v-model:双向数据绑定指令 数据变了,视图跟着变(数据驱动视图)视图变了,数…...

Python 类的设计(以植物大战僵尸为例)
关于类的设计——以植物大战僵尸为例 一、设计类需满足的三要素1. 类名2. 属性和方法 二、以植物大战僵尸的为例的类的设计1. 尝试分类2. 创建对象调用类的属性和方法*【代码二】*3. 僵尸的继承 三、代码实现 一、设计类需满足的三要素 1. 类名 类名:某类事物的名…...

python中权重剪枝,低秩分解,量化技术 代码
目录 python中权重剪枝,低秩分解,量化技术 代码 权重剪枝 低秩分解 scipy 量化技术 python中权重剪枝,低秩分解,量化技术 代码 权重剪枝 权重剪枝可以通过PyTorch的torch.nn.utils.prune模块实现。以下是一个简单的例子: import torch import torch.nn as nn impor…...

调用matlab用户自定义的function函数时,有多个输出变量只输出第一个变量
很多朋友在使用matlab时,会使用或自己编辑多个function函数,来满足自己对任务处理的要求,但是在调用function函数时,会出现这个问题:调用matlab用户自定义的function函数时,有多个输出变量只输出第一个变量…...

RabbitMQ七种工作模式之简单模式, 工作队列模式, 发布订阅模式, 路由模式, 通配符模式
文章目录 一. Simple(简单模式)公共代码:生产者:消费者: 二. Work Queue(工作队列模式)公共代码:生产者:消费者1, 消费者2(代码相同): 三. Publish/Subscribe(发布/订阅模式)公共代码:生产者:消费者: 四. Routing(路由模式)公共代码:消费者: 五. Topics(通配符模式)公共代码:生…...

Win10安装kafka并用C#调用
kafka安装 jdk、kafka版本如下,zookeeper使用kafka自带版本 安装包下载位置:https://download.csdn.net/download/henreash/90087368 (赚点csdn下载资源分) 安装jdk后,解压kafka压缩包,修改配置文件: kafka_2.13-3.9.0\config\…...
。】2022-5-15)
【根据当天日期输出明天的日期(需对闰年做判定)。】2022-5-15
缘由根据当天日期输出明天的日期(需对闰年做判定)。日期类型结构体如下: struct data{ int year; int month; int day;};-编程语言-CSDN问答 struct mdata{ int year; int month; int day; }mdata; int 天数(int year, int month) {switch (month){case 1: case 3:…...

如何为服务器生成TLS证书
TLS(Transport Layer Security)证书是确保网络通信安全的重要手段,它通过加密技术保护传输的数据不被窃听和篡改。在服务器上配置TLS证书,可以使用户通过HTTPS协议安全地访问您的网站。本文将详细介绍如何在服务器上生成一个TLS证…...
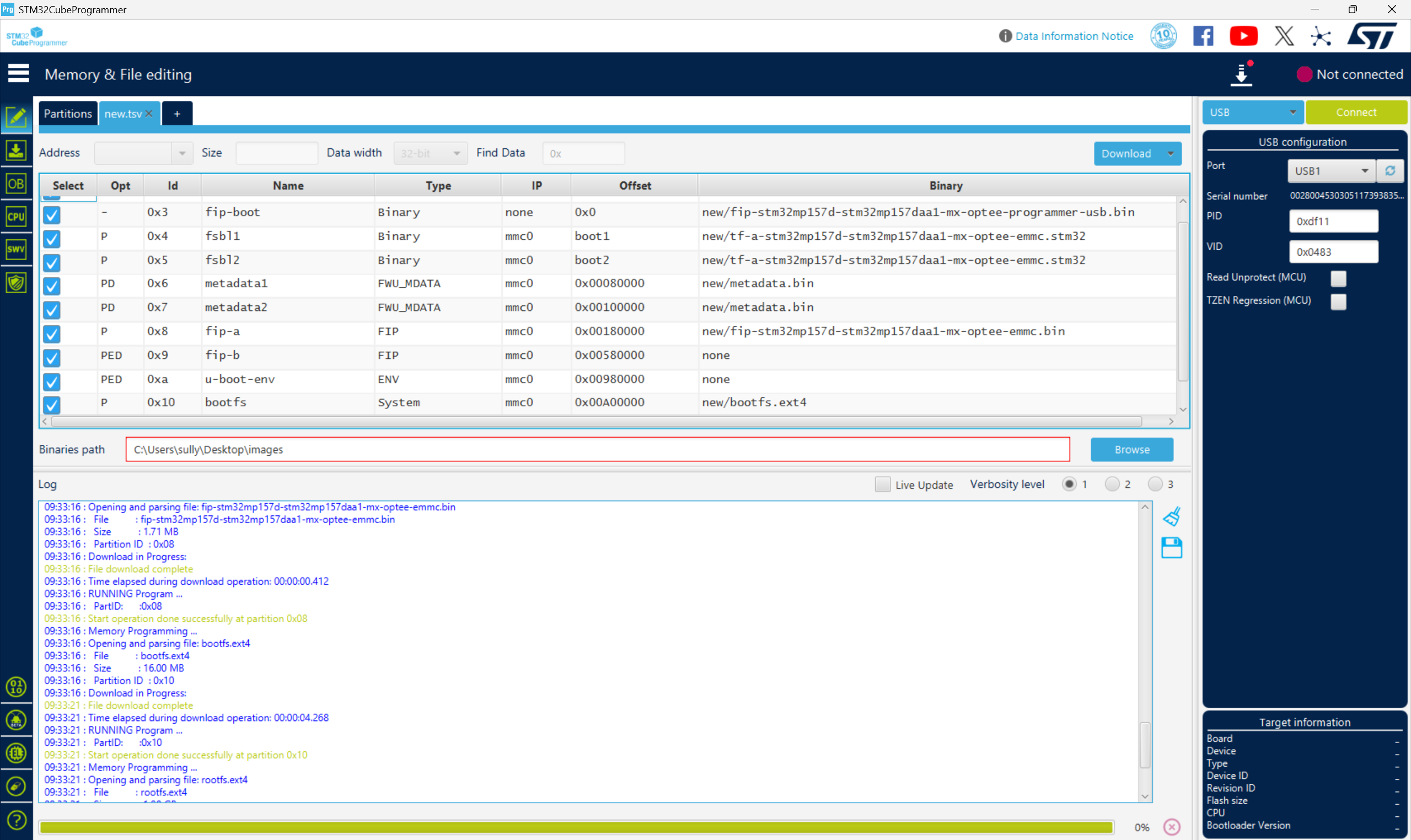
从零开始打造 OpenSTLinux 6.6 Yocto 系统(基于STM32CubeMX)(九)
设备树移植 和uboot设备树修改的内容同步到kernel将设备树stm32mp157d-stm32mp157daa1-mx.dts复制到内核源码目录下 源码修改及编译 修改arch/arm/boot/dts/st/Makefile,新增设备树编译 stm32mp157f-ev1-m4-examples.dtb \stm32mp157d-stm32mp157daa1-mx.dtb修改…...

什么?连接服务器也能可视化显示界面?:基于X11 Forwarding + CentOS + MobaXterm实战指南
文章目录 什么是X11?环境准备实战步骤1️⃣ 服务器端配置(CentOS)2️⃣ 客户端配置(MobaXterm)3️⃣ 验证X11 Forwarding4️⃣ 运行自定义GUI程序(Python示例)5️⃣ 成功效果
学校时钟系统,标准考场时钟系统,AI亮相2025高考,赛思时钟系统为教育公平筑起“精准防线”
2025年#高考 将在近日拉开帷幕,#AI 监考一度冲上热搜。当AI深度融入高考,#时间同步 不再是辅助功能,而是决定AI监考系统成败的“生命线”。 AI亮相2025高考,40种异常行为0.5秒精准识别 2025年高考即将拉开帷幕,江西、…...

日常一水C
多态 言简意赅:就是一个对象面对同一事件时做出的不同反应 而之前的继承中说过,当子类和父类的函数名相同时,会隐藏父类的同名函数转而调用子类的同名函数,如果要调用父类的同名函数,那么就需要对父类进行引用&#…...
)
华为OD最新机试真题-数组组成的最小数字-OD统一考试(B卷)
题目描述 给定一个整型数组,请从该数组中选择3个元素 组成最小数字并输出 (如果数组长度小于3,则选择数组中所有元素来组成最小数字)。 输入描述 行用半角逗号分割的字符串记录的整型数组,0<数组长度<= 100,0<整数的取值范围<= 10000。 输出描述 由3个元素组成…...
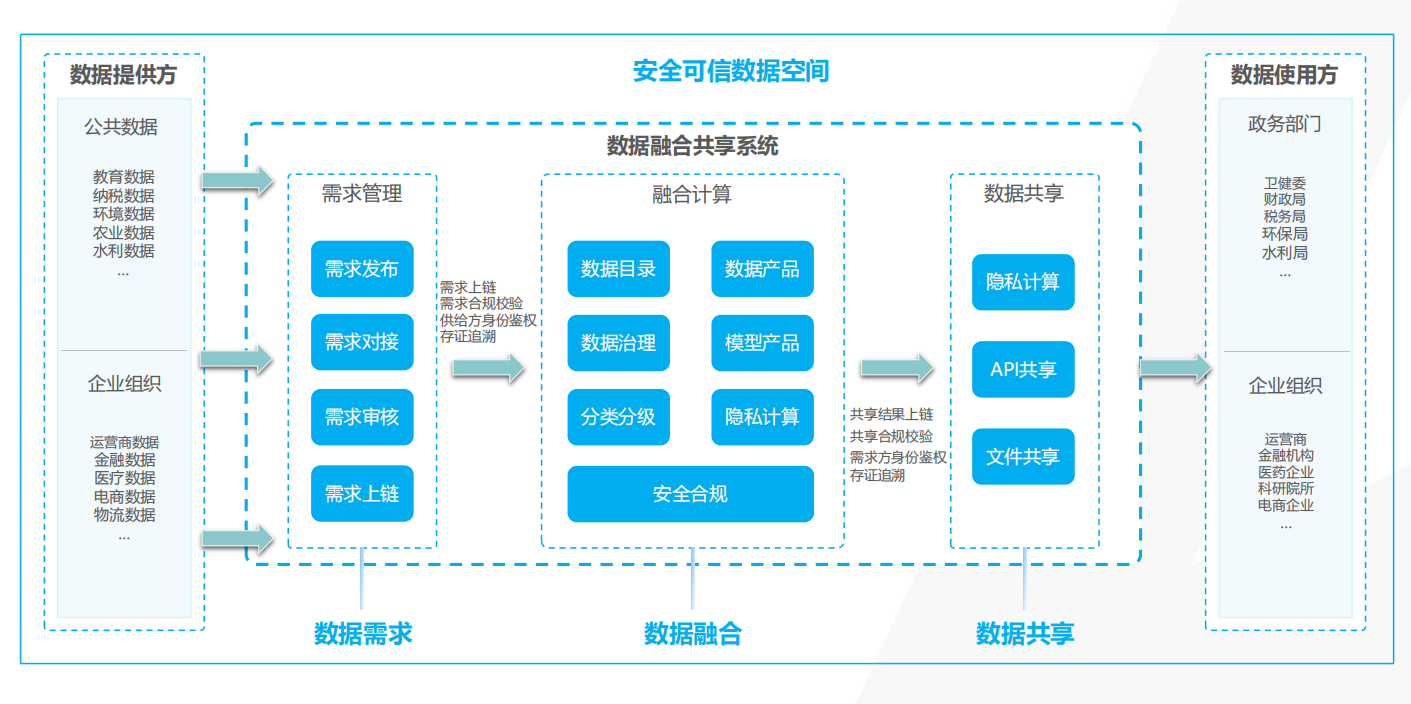
热烈祝贺埃文科技正式加入可信数据空间发展联盟
2025年4月29日,在福州举办的第八届数字中国建设峰会“可信数据空间分论坛”上,可信数据空间发展联盟正式宣告成立。国家数据局党组书记、局长刘烈宏出席并致辞,强调该联盟是推进全国一体化数据市场建设的关键抓手。 郑州埃文科技有限公司&am…...

ubuntu22.04 安装docker 和docker-compose
首先你要确保没有docker环境或者使用命令删掉docker sudo apt-get remove docker docker-engine docker.io containerd runc安装docker 更新软件环境 sudo apt update sudo apt upgrade下载docker依赖和GPG 密钥 # 依赖 apt-get install ca-certificates curl gnupg lsb-rel…...
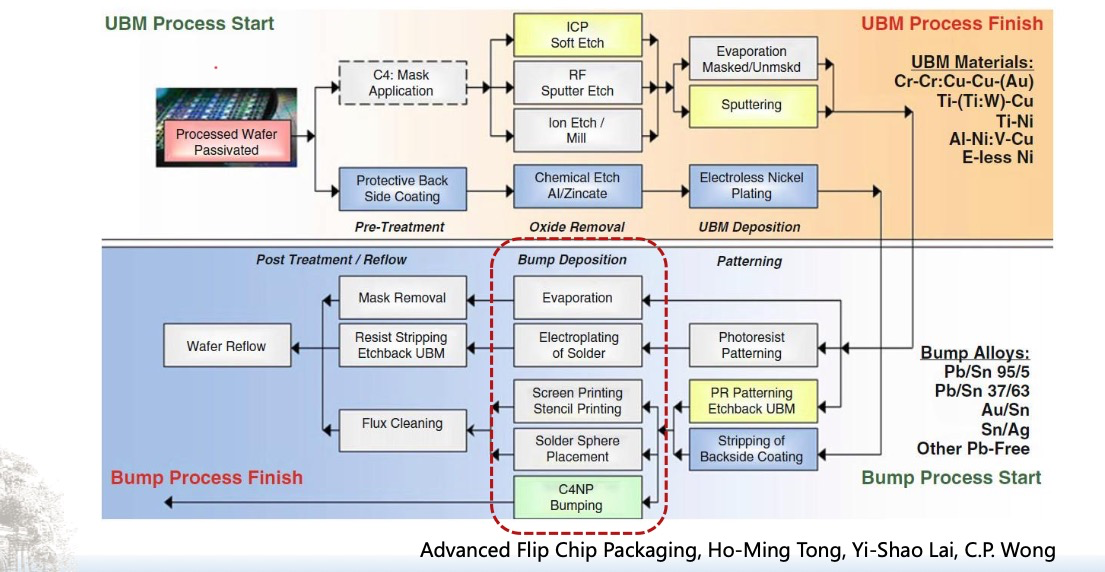
倒装芯片凸点成型工艺
UBM(Under Bump Metallization)与Bump(焊球)形成工艺流程。我们可以将整张流程图分为三大阶段来理解: 🔧 一、UBM(Under Bump Metallization)工艺流程(黄色区域ÿ…...