【小制作】米家模拟手指点击
代码功能解释
这段代码是一个基于Arduino平台的控制程序,主要功能包括:
- 初始化:设置引脚模式、初始化编码器、舵机和EEPROM。
- 按键检测:处理按钮的单击、双击和长按事件,并根据事件执行相应操作。
- 编码器更新:检测旋转编码器的状态,调整变量值并控制LED闪烁。
- 舵机控制:根据设定的角度和速度移动舵机。
- LED控制:根据条件交替闪烁两个LED。
详细解释
-
初始化:
- 设置引脚模式为输入或输出。
- 初始化编码器、舵机和EEPROM。
-
主循环:
- 持续检测按键状态。
- 更新编码器状态。
- 控制舵机运动。
- 控制LED闪烁。
-
按键检测:
- 检查每个按钮的状态。
- 根据按键事件(长按、双击、单击)执行不同操作。
-
编码器更新:
- 检测编码器旋转方向。
- 根据旋转方向增加或减少变量值。
- 切换LED状态。
-
舵机控制:
- 根据设定的角度和速度移动舵机。
- 正向和反向移动舵机。
-
LED控制:
- 控制两个LED交替闪烁。
#include "Arduino.h"
#include <Bounce2.h>
#include <Servo.h>
#include <EEPROM.h>// 定义引脚
#define EC11_A PB_2 // 编码器A
#define EC11_B PA_7 // 编码器B
#define BUTTON_1 PA_4 // 按钮1
#define BUTTON_2 PA_6 // 按钮2
#define PWM_1 PB_0 // PWM控制
#define LED_0 PA_0 // LED0
#define LED_1 PA_1 // LED1// 定义常量
const unsigned long debounceTime = 50;
const unsigned long longPressTime = 1000;
const unsigned long doubleClickTime = 300;
const long led_interval = 300;
const int DEFAULT_START_ANGLE = 90;
const int DEFAULT_STEPS = 100;// 定义变量
uint8_t fast_num = 1; // 运动速度
uint8_t fast_delta = 90; // 运动距离
uint8_t Count_step = 1; // 运动速度调节步进
bool Duoji_run_Flag = false;
bool CounterChanged = false;
int pos = 0;
int variableA = 0;
int variableB = 0;
bool isVariableA = true;// 定义LED状态
bool led0State = LOW;
bool led1State = LOW;
unsigned long previousMillis1 = 0;
unsigned long previousMillis2 = 0;
bool led0Blinked = false;
bool led1Blinked = false;// 定义按键状态结构体
struct ButtonState
{int pin;int lastState;int currentState;unsigned long lastDebounceTime;unsigned long lastClickTime;bool isLongPress;bool isSingleClickHandled;
};// 初始化按键状态
ButtonState button1 = {BUTTON_1, HIGH, HIGH, 0, 0, false, false};
ButtonState button2 = {BUTTON_2, HIGH, HIGH, 0, 0, false, false};// 初始化Bounce对象
Bounce encoderPinAButton = Bounce();
Bounce encoderPinBButton = Bounce();// 初始化Servo对象
Servo myservo;// 宏定义调试输出
#define _DRV_TAG_ " line"
#define serial_dbg(fmt, args...) \do \{ \if (1) \{ \Serial.printf("" _DRV_TAG_ "%d [%s] " fmt " \n", __LINE__, __FUNCTION__, ##args); \} \} while (0)// 初始化函数
void setup()
{Serial.begin(115200);serial_dbg("Hello, Air001. \n");// 设置LED引脚为输出模式pinMode(LED_0, OUTPUT);pinMode(LED_1, OUTPUT);// 初始化LED状态为灭digitalWrite(LED_0, LOW);digitalWrite(LED_1, LOW);// 设置按键引脚为输入模式pinMode(BUTTON_1, INPUT);pinMode(BUTTON_2, INPUT);// 初始化编码器sys_RotaryInit();// 初始化PWM频率和分辨率pinMode(PWM_1, OUTPUT);myservo.attach(PWM_1, 500, 2500); // 修正脉冲宽度read_eeprom();//读数据
}// 主循环函数
void loop()
{checkButton(); // 检测按键encoder_update(); // 更新编码器状态duoji(); // 控制舵机led_blink_once(); // 控制LED闪烁
}
void blinkLEDsAlternatingTwice() {// 保存当前LED状态bool savedLed0State = led0State;bool savedLed1State = led1State;// 交替闪烁两次for (int i = 0; i < 2; i++) {digitalWrite(LED_0, HIGH);digitalWrite(LED_1, LOW);delay(led_interval);digitalWrite(LED_0, LOW);digitalWrite(LED_1, HIGH);delay(led_interval);}// 恢复LED状态digitalWrite(LED_0, savedLed0State);digitalWrite(LED_1, savedLed1State);
}
void write_eeprom() {// 写入EEPROMEEPROM.write(0, fast_num);EEPROM.write(1, fast_delta);// 写完EEPROM后两颗LED交替闪烁两次blinkLEDsAlternatingTwice();
}
void read_eeprom() {// 读取EEPROMfast_num = EEPROM.read(0);fast_delta = EEPROM.read(1);if (fast_num == 0 || fast_delta == 0) {fast_num = DEFAULT_START_ANGLE;fast_delta = DEFAULT_STEPS;write_eeprom();}serial_dbg("fast_num: %d, fast_delta: %d", fast_num, fast_delta);
}
// 初始化编码器
void sys_RotaryInit()
{pinMode(EC11_A, INPUT);pinMode(EC11_B, INPUT);pinMode(BUTTON_1, INPUT_PULLUP);encoderPinAButton.attach(EC11_A);encoderPinAButton.interval(5);encoderPinBButton.attach(EC11_B);encoderPinBButton.interval(5);
}// 检测按键状态
void checkButton()
{checkButtonState(button1);checkButtonState(button2);
}// 处理按键状态
void checkButtonState(ButtonState &button)
{int reading = digitalRead(button.pin); // 读取按钮状态// 去抖动处理if (reading != button.lastState){button.lastDebounceTime = millis();}if ((millis() - button.lastDebounceTime) > debounceTime){if (reading != button.currentState){button.currentState = reading;if (button.currentState == LOW){button.lastClickTime = millis();button.isLongPress = false;button.isSingleClickHandled = false; // 新增标志位}else{unsigned long pressDuration = millis() - button.lastClickTime;if (pressDuration > longPressTime){button.isLongPress = true;handleLongPress(button.pin);}else if (!button.isLongPress){// 检查是否为双击if ((millis() - button.lastClickTime) < doubleClickTime && !button.isSingleClickHandled){if (digitalRead(button.pin) == HIGH){handleDoubleClick(button.pin);button.isSingleClickHandled = true; // 标记双击已处理}}else if (!button.isSingleClickHandled){// 如果不是双击,则处理单击事件handleSingleClick(button.pin);button.isSingleClickHandled = true;}}}}}button.lastState = reading;
}// 处理长按事件
void handleLongPress(int pin)
{switch (pin){case BUTTON_1:serial_dbg("Button 1 Long Press");isVariableA = !isVariableA;if (isVariableA){digitalWrite(LED_1, LOW);led1State = LOW;serial_dbg("Switching to Variable A");}else{digitalWrite(LED_1, HIGH);led1State = HIGH;serial_dbg("Switching to Variable B");}break;case BUTTON_2:serial_dbg("Button 2 Long Press");Duoji_run_Flag = true;break;default:break;}
}// 处理双击事件
void handleDoubleClick(int pin)
{switch (pin){case BUTTON_1:serial_dbg("Button 1 Double Click");Duoji_run_Flag = true;break;case BUTTON_2:serial_dbg("Button 2 Double Click");break;default:break;}
}// 处理单击事件
void handleSingleClick(int pin)
{switch (pin){case BUTTON_1:write_eeprom();serial_dbg("Button 1 Single Click");break;case BUTTON_2:serial_dbg("Button 2 Single Click");Duoji_run_Flag = true;break;default:break;}
}// 更新编码器状态
void encoder_update()
{encoderPinAButton.update();encoderPinBButton.update();// 检测编码器旋转if (encoderPinAButton.fell()){if (encoderPinBButton.read() == HIGH){if (isVariableA){variableA=fast_num;variableA += Count_step; // 顺时针旋转fast_num = variableA;}else{variableB = fast_delta;variableB += Count_step; // 顺时针旋转fast_delta = variableB;}}else{if (isVariableA){variableA=fast_num;variableA -= Count_step; // 逆时针旋转fast_num = variableA;}else{variableB = fast_delta;variableB -= Count_step; // 逆时针旋转fast_delta = variableB;}}CounterChanged = true;if (isVariableA){serial_dbg("Variable A= %d ", variableA);}else{serial_dbg("Variable B= %d ", variableB);}led0Blinked = false;led_blink_once();}
}// 控制舵机
void duoji()
{if (Duoji_run_Flag){int DEFAULT_END_ANGLE = fast_delta + DEFAULT_START_ANGLE;Duoji_run_Flag = false;unsigned long startTime = millis();int totalTime = fast_num * 200;// 正向移动moveServo(DEFAULT_START_ANGLE, DEFAULT_END_ANGLE, DEFAULT_STEPS, startTime, totalTime);startTime = millis();// 反向移动moveServo(DEFAULT_END_ANGLE, DEFAULT_START_ANGLE, DEFAULT_STEPS, startTime, totalTime);}
}// 移动舵机的辅助函数
void moveServo(int startAngle, int endAngle, int steps, unsigned long startTime, int totalTime)
{unsigned long stepDuration = totalTime / steps;float deltaAngle = (endAngle - startAngle) * 0.5;for (int i = 0; i <= steps; i++){float t = (float)i / steps;int angle = startAngle + deltaAngle * (1 - cos(t * PI));myservo.write(angle);delay(totalTime / steps);// 非阻塞延时while (millis() - startTime < (i + 1) * stepDuration){checkButton();yield(); // 或者其他适合的多任务处理方法}}
}// 控制LED闪烁
void led_blink_once()
{unsigned long currentMillis = millis();// 控制LED1闪烁一次blinkLEDOnce(LED_0, led0State, previousMillis1, currentMillis, led_interval, led0Blinked);// 控制LED2闪烁一次blinkLEDOnce(LED_1, led1State, previousMillis2, currentMillis, led_interval, led1Blinked);
}// 闪烁LED一次
void blinkLEDOnce(int pin, bool &state, unsigned long &previousMillis, unsigned long currentMillis, long led_interval, bool &blinked)
{if (!blinked){if (currentMillis - previousMillis >= led_interval){previousMillis = currentMillis;state = !state; // 切换LED状态digitalWrite(pin, state);if (state == LOW){blinked = true; // 标记LED已经闪烁}}}
}
相关文章:

【小制作】米家模拟手指点击
代码功能解释 这段代码是一个基于Arduino平台的控制程序,主要功能包括: 初始化:设置引脚模式、初始化编码器、舵机和EEPROM。按键检测:处理按钮的单击、双击和长按事件,并根据事件执行相应操作。编码器更新ÿ…...

【深度学习入门_基础篇】线性代数本质
开坑本部分主要为基础知识复习,新开坑中,学习记录自用。 学习目标: 熟悉向量、线性组合、线性变换、基变换、矩阵运算、逆函数、秩、列空间、零空间、范式、特征指、特征向量等含义与应用。 强烈推荐此视频: 【官方双语/合集】…...

047_小驰私房菜_Qcom 8系列,Jpeg GPU 旋转
【问题背景】 横屏模式下,发现有些三方app拍照旋转了90度。 【修改策略】 adb shell setprop endor.debug.camera.overrideGPURotationUsecase 1 或者在/vendor/etc/camera/camxoverridesettings.txt 里面添加如下内容 overrideGPURotationUsecase1 【解释】 Ga…...

Elasticsearch 操作文档对数据的增删改查操作 索引库文档 操作数据 CRUD
介绍 在 Elasticsearch 中,文档的增、删、改、查操作是核心的基本功能。Elasticsearch 使用 RESTful API 提供这些操作,通常通过 HTTP 请求与 Elasticsearch 集群进行交互。 索引库 {"mappings": {"properties": {"title&qu…...
)
最新MySQL面试题(2025超详细版)
2025最新超详细MySQL面试题 文章目录 2025最新超详细MySQL面试题[toc]一、 SQL 和基本操作1. SQL的执行顺序2. 如何优化MySQL查询3. 常用的聚合函数4. 数据库事务5. 事务的四大特性(ACID)6. 视图7. MySQL中使用LIMIT子句进行分页8. MySQL中使用变量和用户定义的函数9. MySQL中的…...

使用MPTCP+BBR进行数据传输,让网络又快又稳
1.前言 在前文《链路聚合技术——多路径传输Multipath TCP(MPTCP)快速实践》中我们使用mptcpize run命令实现了两个节点间通信使用MPTCP协议进行传输,并实现了传输速率的聚合。 实际应用中更推荐原生支持mptcp的应用,在MPTCP官网中可以看到如TCPDump、…...

滴滴数据分析80道面试题及参考答案
如何衡量分类好坏? 衡量分类好坏有多种方法,常用的有准确率、精确率、召回率、F1 值、ROC 曲线与 AUC 值等。 准确率:是指分类正确的样本数占总样本数的比例,计算公式为:准确率 = (分类正确的样本数)/(总样本数)。准确率越高,说明分类器整体的分类效果越好,但在正负…...

基于物联网疫苗冷链物流监测系统设计
1. 项目开发背景 随着全球对疫苗运输要求的提高,特别是针对温度敏感型药品(如疫苗)的冷链管理,如何保证疫苗在运输过程中的温度、湿度、震动等环境因素的稳定性已成为亟需解决的问题。疫苗运输过程中,任何温度或湿度的…...

计算机网络基础(7)中科大郑铨老师笔记
应用层 目标: 网络应用的 原理:网络应用协议的概念和实现方面 传输层的服务模型 客户-服务器模式 对等模式(peerto-peer) 内容分发网络 网络应用的 实例:互联网流行的应用层协 议 HTTP FTP SMTP / POP3 / IMAP DNS…...

GOGOGO 抽象
抽象其实也算面向对象特征之一 抽象 含义:当多个子类中的共性向上提取,父类中不知道如何写具体实现,因为提取的共性并不一定能解决子类中实现的功能【同结构不一定同实现代码体】,就需要抽象概念 作用 父类只抽取结构ÿ…...

STM32-笔记26-WWDG窗口看门狗
一、简介 窗口看门狗用于监测单片机程序运行时效是否精准,主要检测软件异常,一般用于需要精准检测程序运行时间的场合。 窗口看门狗的本质是一个能产生系统复位信号和提前唤醒中断的6位计数器(有的地方说7位。其实都无所谓࿰…...

10.装饰器
装饰器的基本用法创建简单的装饰器带参数的装饰器装饰器链类装饰器内置装饰器 定义:装饰器是一个函数,它接受另一个函数作为参数,并返回一个新的函数。装饰器通常用于在函数执行前后添加额外的功能,如日志记录、权限检查、性能测试等。 1.基…...

uniapp H5页面实现懒加载
在 uniapp 中,要在小的 view 内实现列表懒加载,可以通过以下步骤来实现: 使用 scroll-view 组件来创建一个可滚动的区域。在 scroll-view内 部放置一个list组件,用于显示数据列表。监听 scroll-view 的滚动事件,当滚动…...

STM32使用UART发送字符串与printf输出重定向
首先我们先看STM32F103C8T6的电路图 由图可知,其PA9和PA10引脚分别为UART的TX和RX(注意:这个电路图是错误的,应该是PA9是X而PA9是RX,我们看下图的官方文件可以看出),那么接下来我们应该找到该引脚的定义是什么…...

NLP初识
目录 0简介一、自然语言概述1. 什么是NLP?2. NLP常用工具0简介 NLP系列开始更新了!!!这个系列主要会介绍一些NLP的基础概念,比如RNN、LSTM、GRU等内容,重头戏放在大语言模型的基础讲解上,其中大语言模型的分享主要由两个方面:1.基础结构(Seq2Seq,Attention,Transfor…...

解決當前IP地址僅適用於本地網路
想要解決“當前IP地址僅適用於本地網路”其實並不困難。本篇文章將介紹其發生的原因以及如何解決。 “僅限本地網路”是什麼意思? 當IP地址為“僅限本地網路”時,意味著設備正在使用私人網路內部IP地址,但無法連接到互聯網。如果將本地IP視…...

Eplan 项目结构(高层代号、安装地点、位置代号)
Eplan中的项目结构分为3个层次: (1)功能面结构。指明这个系统的功能,有什么用途。在EPlan中,指的就是"高层代号()"。 一般指的是线体。 (2)位置面结构。指明该…...

文献分享集:跨模态的最邻近查询RoarGraph
文章目录 1. \textbf{1. } 1. 导论 1.1. \textbf{1.1. } 1.1. 研究背景 1.2. \textbf{1.2. } 1.2. 本文的研究 1.3. \textbf{1.3. } 1.3. 有关工作 2. \textbf{2. } 2. 对 OOD \textbf{OOD} OOD负载的分析与验证 2.1. \textbf{2.1. } 2.1. 初步的背景及其验证 2.1.1. \textbf{2…...

xdoj 判断字符串子串
判断字符串子串 问题描述 编写程序: 判断一个不大于 20 个字符的字符串是否是另一个不大于 20 个字符的字符串的子 串,如果是,则输出子串在父串的起始位置, 如果不是子串,则输出 No!。 输入说明 输入分 2 行: 第…...

n8n - AI自动化工作流
文章目录 一、关于 n8n关键能力n8n 是什么意思 二、快速上手 一、关于 n8n n8n是一个具有原生AI功能的工作流自动化平台,它为技术团队提供了代码的灵活性和无代码的速度。凭借400多种集成、原生人工智能功能和公平代码许可证,n8n可让您构建强大的自动化…...
eNSP-Cloud(实现本地电脑与eNSP内设备之间通信)
说明: 想象一下,你正在用eNSP搭建一个虚拟的网络世界,里面有虚拟的路由器、交换机、电脑(PC)等等。这些设备都在你的电脑里面“运行”,它们之间可以互相通信,就像一个封闭的小王国。 但是&#…...
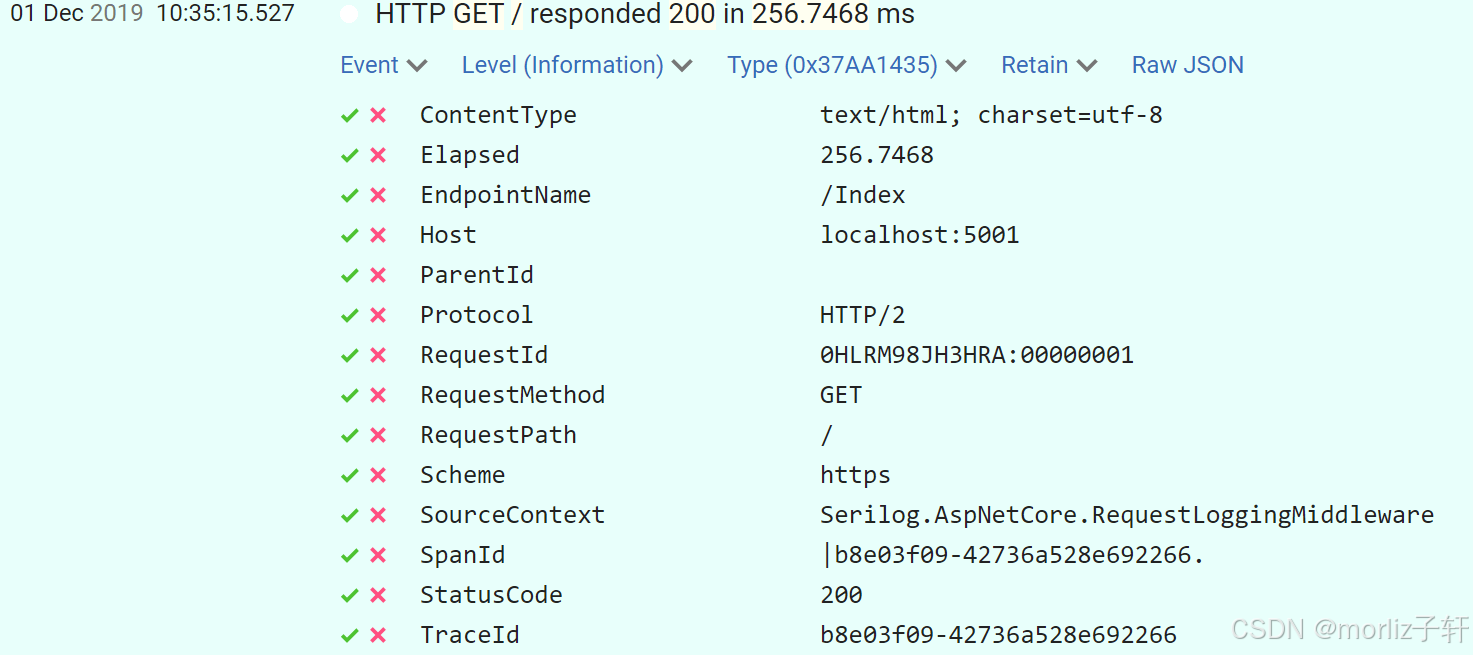
深入浅出Asp.Net Core MVC应用开发系列-AspNetCore中的日志记录
ASP.NET Core 是一个跨平台的开源框架,用于在 Windows、macOS 或 Linux 上生成基于云的新式 Web 应用。 ASP.NET Core 中的日志记录 .NET 通过 ILogger API 支持高性能结构化日志记录,以帮助监视应用程序行为和诊断问题。 可以通过配置不同的记录提供程…...

Vue记事本应用实现教程
文章目录 1. 项目介绍2. 开发环境准备3. 设计应用界面4. 创建Vue实例和数据模型5. 实现记事本功能5.1 添加新记事项5.2 删除记事项5.3 清空所有记事 6. 添加样式7. 功能扩展:显示创建时间8. 功能扩展:记事项搜索9. 完整代码10. Vue知识点解析10.1 数据绑…...

<6>-MySQL表的增删查改
目录 一,create(创建表) 二,retrieve(查询表) 1,select列 2,where条件 三,update(更新表) 四,delete(删除表…...

MongoDB学习和应用(高效的非关系型数据库)
一丶 MongoDB简介 对于社交类软件的功能,我们需要对它的功能特点进行分析: 数据量会随着用户数增大而增大读多写少价值较低非好友看不到其动态信息地理位置的查询… 针对以上特点进行分析各大存储工具: mysql:关系型数据库&am…...

基于Flask实现的医疗保险欺诈识别监测模型
基于Flask实现的医疗保险欺诈识别监测模型 项目截图 项目简介 社会医疗保险是国家通过立法形式强制实施,由雇主和个人按一定比例缴纳保险费,建立社会医疗保险基金,支付雇员医疗费用的一种医疗保险制度, 它是促进社会文明和进步的…...
高等数学(下)题型笔记(八)空间解析几何与向量代数
目录 0 前言 1 向量的点乘 1.1 基本公式 1.2 例题 2 向量的叉乘 2.1 基础知识 2.2 例题 3 空间平面方程 3.1 基础知识 3.2 例题 4 空间直线方程 4.1 基础知识 4.2 例题 5 旋转曲面及其方程 5.1 基础知识 5.2 例题 6 空间曲面的法线与切平面 6.1 基础知识 6.2…...

unix/linux,sudo,其发展历程详细时间线、由来、历史背景
sudo 的诞生和演化,本身就是一部 Unix/Linux 系统管理哲学变迁的微缩史。来,让我们拨开时间的迷雾,一同探寻 sudo 那波澜壮阔(也颇为实用主义)的发展历程。 历史背景:su的时代与困境 ( 20 世纪 70 年代 - 80 年代初) 在 sudo 出现之前,Unix 系统管理员和需要特权操作的…...
)
GitHub 趋势日报 (2025年06月08日)
📊 由 TrendForge 系统生成 | 🌐 https://trendforge.devlive.org/ 🌐 本日报中的项目描述已自动翻译为中文 📈 今日获星趋势图 今日获星趋势图 884 cognee 566 dify 414 HumanSystemOptimization 414 omni-tools 321 note-gen …...

数据库分批入库
今天在工作中,遇到一个问题,就是分批查询的时候,由于批次过大导致出现了一些问题,一下是问题描述和解决方案: 示例: // 假设已有数据列表 dataList 和 PreparedStatement pstmt int batchSize 1000; // …...