39. I2C实验
一、IIC协议详解
1、ALPHA开发板上有个AP3216C,这是一个IIC接口的器件,这是一个环境光传感器。AP3216C连接到了I2C1上:
I2C1_SCL: 使用的是UART4_TXD这个IO,复用位ALT2
I2C1_SDA: 使用的是UART4_RXD这个IO。复用为ALT2
2、I2C分为SCL和SDA,这两个必须要接上拉电阻到VCC,比如3.3V,一般是4.7K上拉电阻。
3、I2C总线支持多从机,通过从机地址来区分访问哪个从机。
二、6ULL I2C接口详解
1、6UL的I2C频率标准模式100kbit/S,快速模式400Kbit/S
2、时钟源选择perclk_clk_root=ipg_clk_root=66MHz
3、IFDR寄存器设置I2C频率,bit5:0设置频分值,假如我们现在需要100kbit的速率,那么66000000/100000=660。经过查找IC位设置位0X38或0X15的时候,为640分频,66000000/640=103.125Kbit.
4、I2CR寄存器,bit7为I2C使能位,置1使能I2C。bit5为主从模式选择位,为0表示从机,为1表示主机。Bit4为发送/接收设置位,为0的时候是接收,为1的时候是发送
5、I2SR寄存器,bit7为传输完成位,为0表示正在发送,为1表示发送完成。Bit5是I2C忙闲位,为0的时候I2C总线空闲,为1的时候I2C总线忙。Bit0是读确认位,也就是ACK信号
6、I2DR寄存器,数据寄存器。
三、AP3216C简介
1、AP3216C是一个三合一的环境光传感器,ALS+PS+IRLED,ALS是环境光,PS是接近传感器,IR是红外LED灯。I2C接口,最高400Kbit/S的频率。
2、环境光,ALS是16位输出。
3、接近传感器PS,10bit输出。IR传感器也是10bit
4、AP3216C的从机地址位0X1E。
5、0X0A是IR Ddata low。Bit7为0的时候表示IR和PS数据有效,为1的时候IR和PS数据无效。Bit1:0是IR的低2位。
6、0X0B是IR Data high,big7:0是高字节。与0X0A一起组成10bit的数据。
7、0X0C和0X0D分别位ALS的低8位和高8位。
8、0X0E的bit3:0是低4位数据,0X0F的bit5:0是高6位数据。加起来就是10位
9、0X00是系统配置寄存器,bit2:0设置AP3216C开始那些传感器,我们需要设置位011,也就是0x3,表示开始ALS+PS+IR。
四、实验程序编写
//bsp_i2c.c
#include "bsp_i2c.h"
#include "bsp_delay.h"
#include "stdio.h"/** @description : 初始化I2C,波特率100KHZ* @param - base : 要初始化的IIC设置* @return : 无*/
void i2c_init(I2C_Type *base)
{/* 1、配置I2C */base->I2CR &= ~(1 << 7); /* 要访问I2C的寄存器,首先需要先关闭I2C *//* 设置波特率为100K* I2C的时钟源来源于IPG_CLK_ROOT=66Mhz* IC2 时钟 = PERCLK_ROOT/dividison(IFDR寄存器)* 设置寄存器IFDR,IFDR寄存器参考IMX6UL参考手册P1260页,表29-3,* 根据表29-3里面的值,挑选出一个还是的分频数,比如本例程我们* 设置I2C的波特率为100K, 因此当分频值=66000000/100000=660.* 在表29-3里面查找,没有660这个值,但是有640,因此就用640,* 即寄存器IFDR的IC位设置为0X15*/base->IFDR = 0X15 << 0;/** 设置寄存器I2CR,开启I2C* bit[7] : 1 使能I2C,I2CR寄存器其他位其作用之前,此位必须最先置1*/base->I2CR |= (1<<7);
}/** @description : 发送重新开始信号* @param - base : 要使用的IIC* @param - addrss : 设备地址* @param - direction : 方向* @return : 0 正常 其他值 出错*/
unsigned char i2c_master_repeated_start(I2C_Type *base, unsigned char address, enum i2c_direction direction)
{/* I2C忙并且工作在从模式,跳出 */if(base->I2SR & (1 << 5) && (((base->I2CR) & (1 << 5)) == 0)) return 1;/** 设置寄存器I2CR* bit[4]: 1 发送* bit[2]: 1 产生重新开始信号*/base->I2CR |= (1 << 4) | (1 << 2);/** 设置寄存器I2DR* bit[7:0] : 要发送的数据,这里写入从设备地址* 参考资料:IMX6UL参考手册P1249*/ base->I2DR = ((unsigned int)address << 1) | ((direction == kI2C_Read)? 1 : 0);return 0;
}/** @description : 发送开始信号* @param - base : 要使用的IIC* @param - addrss : 设备地址* @param - direction : 方向* @return : 0 正常 其他值 出错*/
unsigned char i2c_master_start(I2C_Type *base, unsigned char address, enum i2c_direction direction)
{if(base->I2SR & (1 << 5)) /* I2C忙 */return 1;/** 设置寄存器I2CR* bit[5]: 1 主模式* bit[4]: 1 发送*/base->I2CR |= (1 << 5) | (1 << 4);/** 设置寄存器I2DR* bit[7:0] : 要发送的数据,这里写入从设备地址* 参考资料:IMX6UL参考手册P1249*/ base->I2DR = ((unsigned int)address << 1) | ((direction == kI2C_Read)? 1 : 0);return 0;
}/** @description : 检查并清除错误* @param - base : 要使用的IIC* @param - status : 状态* @return : 状态结果*/
unsigned char i2c_check_and_clear_error(I2C_Type *base, unsigned int status)
{/* 检查是否发生仲裁丢失错误 */if(status & (1<<4)){base->I2SR &= ~(1<<4); /* 清除仲裁丢失错误位 */base->I2CR &= ~(1 << 7); /* 先关闭I2C */base->I2CR |= (1 << 7); /* 重新打开I2C */return I2C_STATUS_ARBITRATIONLOST;} else if(status & (1 << 0)) /* 没有接收到从机的应答信号 */{return I2C_STATUS_NAK; /* 返回NAK(No acknowledge) */}return I2C_STATUS_OK;
}/** @description : 停止信号* @param - base : 要使用的IIC* @param : 无* @return : 状态结果*/
unsigned char i2c_master_stop(I2C_Type *base)
{unsigned short timeout = 0xffff;/** 清除I2CR的bit[5:3]这三位*/base->I2CR &= ~((1 << 5) | (1 << 4) | (1 << 3));/* 等待忙结束 */while((base->I2SR & (1 << 5))){timeout--;if(timeout == 0) /* 超时跳出 */return I2C_STATUS_TIMEOUT;}return I2C_STATUS_OK;
}/** @description : 发送数据* @param - base : 要使用的IIC* @param - buf : 要发送的数据* @param - size : 要发送的数据大小* @param - flags : 标志* @return : 无*/
void i2c_master_write(I2C_Type *base, const unsigned char *buf, unsigned int size)
{/* 等待传输完成 */while(!(base->I2SR & (1 << 7))); base->I2SR &= ~(1 << 1); /* 清除标志位 */base->I2CR |= 1 << 4; /* 发送数据 */while(size--){base->I2DR = *buf++; /* 将buf中的数据写入到I2DR寄存器 */while(!(base->I2SR & (1 << 1))); /* 等待传输完成 */ base->I2SR &= ~(1 << 1); /* 清除标志位 *//* 检查ACK */if(i2c_check_and_clear_error(base, base->I2SR))break;}base->I2SR &= ~(1 << 1);i2c_master_stop(base); /* 发送停止信号 */
}/** @description : 读取数据* @param - base : 要使用的IIC* @param - buf : 读取到数据* @param - size : 要读取的数据大小* @return : 无*/
void i2c_master_read(I2C_Type *base, unsigned char *buf, unsigned int size)
{volatile uint8_t dummy = 0;dummy++; /* 防止编译报错 *//* 等待传输完成 */while(!(base->I2SR & (1 << 7))); base->I2SR &= ~(1 << 1); /* 清除中断挂起位 */base->I2CR &= ~((1 << 4) | (1 << 3)); /* 接收数据 *//* 如果只接收一个字节数据的话发送NACK信号 */if(size == 1)base->I2CR |= (1 << 3);dummy = base->I2DR; /* 假读 */while(size--){while(!(base->I2SR & (1 << 1))); /* 等待传输完成 */ base->I2SR &= ~(1 << 1); /* 清除标志位 */if(size == 0){i2c_master_stop(base); /* 发送停止信号 */}if(size == 1){base->I2CR |= (1 << 3);}*buf++ = base->I2DR;}
}/** @description : I2C数据传输,包括读和写* @param - base: 要使用的IIC* @param - xfer: 传输结构体* @return : 传输结果,0 成功,其他值 失败;*/
unsigned char i2c_master_transfer(I2C_Type *base, struct i2c_transfer *xfer)
{unsigned char ret = 0;enum i2c_direction direction = xfer->direction; base->I2SR &= ~((1 << 1) | (1 << 4)); /* 清除标志位 *//* 等待传输完成 */while(!((base->I2SR >> 7) & 0X1)){}; /* 如果是读的话,要先发送寄存器地址,所以要先将方向改为写 */if ((xfer->subaddressSize > 0) && (xfer->direction == kI2C_Read)){direction = kI2C_Write;}ret = i2c_master_start(base, xfer->slaveAddress, direction); /* 发送开始信号 */if(ret){ return ret;}while(!(base->I2SR & (1 << 1))){}; /* 等待传输完成 */ret = i2c_check_and_clear_error(base, base->I2SR); /* 检查是否出现传输错误 */if(ret){i2c_master_stop(base); /* 发送出错,发送停止信号 */return ret;}/* 发送寄存器地址 */if(xfer->subaddressSize){do{base->I2SR &= ~(1 << 1); /* 清除标志位 */xfer->subaddressSize--; /* 地址长度减一 */base->I2DR = ((xfer->subaddress) >> (8 * xfer->subaddressSize)); //向I2DR寄存器写入子地址while(!(base->I2SR & (1 << 1))); /* 等待传输完成 *//* 检查是否有错误发生 */ret = i2c_check_and_clear_error(base, base->I2SR);if(ret){i2c_master_stop(base); /* 发送停止信号 */return ret;} } while ((xfer->subaddressSize > 0) && (ret == I2C_STATUS_OK));if(xfer->direction == kI2C_Read) /* 读取数据 */{base->I2SR &= ~(1 << 1); /* 清除中断挂起位 */i2c_master_repeated_start(base, xfer->slaveAddress, kI2C_Read); /* 发送重复开始信号和从机地址 */while(!(base->I2SR & (1 << 1))){};/* 等待传输完成 *//* 检查是否有错误发生 */ret = i2c_check_and_clear_error(base, base->I2SR);if(ret){ret = I2C_STATUS_ADDRNAK;i2c_master_stop(base); /* 发送停止信号 */return ret; }}} /* 发送数据 */if ((xfer->direction == kI2C_Write) && (xfer->dataSize > 0)){i2c_master_write(base, xfer->data, xfer->dataSize);}/* 读取数据 */if ((xfer->direction == kI2C_Read) && (xfer->dataSize > 0)){i2c_master_read(base, xfer->data, xfer->dataSize);}return 0;
}
//bsp_i2c.h
#ifndef _BSP_I2C_H
#define _BSP_I2C_H
#include "imx6ul.h"/* 相关宏定义 */
#define I2C_STATUS_OK (0)
#define I2C_STATUS_BUSY (1)
#define I2C_STATUS_IDLE (2)
#define I2C_STATUS_NAK (3)
#define I2C_STATUS_ARBITRATIONLOST (4)
#define I2C_STATUS_TIMEOUT (5)
#define I2C_STATUS_ADDRNAK (6)/** I2C方向枚举类型*/
enum i2c_direction
{kI2C_Write = 0x0, /* 主机向从机写数据 */kI2C_Read = 0x1, /* 主机从从机读数据 */
} ;/** 主机传输结构体*/
struct i2c_transfer
{unsigned char slaveAddress; /* 7位从机地址 */enum i2c_direction direction; /* 传输方向 */unsigned int subaddress; /* 寄存器地址 */unsigned char subaddressSize; /* 寄存器地址长度 */unsigned char *volatile data; /* 数据缓冲区 */volatile unsigned int dataSize; /* 数据缓冲区长度 */
};/**函数声明*/
void i2c_init(I2C_Type *base);
unsigned char i2c_master_start(I2C_Type *base, unsigned char address, enum i2c_direction direction);
unsigned char i2c_master_repeated_start(I2C_Type *base, unsigned char address, enum i2c_direction direction);
unsigned char i2c_check_and_clear_error(I2C_Type *base, unsigned int status);
unsigned char i2c_master_stop(I2C_Type *base);
void i2c_master_write(I2C_Type *base, const unsigned char *buf, unsigned int size);
void i2c_master_read(I2C_Type *base, unsigned char *buf, unsigned int size);
unsigned char i2c_master_transfer(I2C_Type *base, struct i2c_transfer *xfer);#endif
//bsp_ap3216c.c
#include "bsp_ap3216c.h"
#include "bsp_i2c.h"
#include "bsp_delay.h"
#include "cc.h"
#include "stdio.h"/** @description : 初始化AP3216C* @param : 无* @return : 0 成功,其他值 错误代码*/
unsigned char ap3216c_init(void)
{unsigned char data = 0;/* 1、IO初始化,配置I2C IO属性 * I2C1_SCL -> UART4_TXD* I2C1_SDA -> UART4_RXD*/IOMUXC_SetPinMux(IOMUXC_UART4_TX_DATA_I2C1_SCL, 1);IOMUXC_SetPinMux(IOMUXC_UART4_RX_DATA_I2C1_SDA, 1);/* *bit 16:0 HYS关闭*bit [15:14]: 1 默认47K上拉*bit [13]: 1 pull功能*bit [12]: 1 pull/keeper使能 *bit [11]: 0 关闭开路输出*bit [7:6]: 10 速度100Mhz*bit [5:3]: 110 驱动能力为R0/6*bit [0]: 1 高转换率*/IOMUXC_SetPinConfig(IOMUXC_UART4_TX_DATA_I2C1_SCL, 0x70B0);IOMUXC_SetPinConfig(IOMUXC_UART4_RX_DATA_I2C1_SDA, 0X70B0);i2c_init(I2C1); /* 初始化I2C1 *//* 2、初始化AP3216C */ap3216c_writeonebyte(AP3216C_ADDR, AP3216C_SYSTEMCONG, 0X04); /* 复位AP3216C */delayms(50); /* AP33216C复位至少10ms */ap3216c_writeonebyte(AP3216C_ADDR, AP3216C_SYSTEMCONG, 0X03); /* 开启ALS、PS+IR */data = ap3216c_readonebyte(AP3216C_ADDR, AP3216C_SYSTEMCONG); /* 读取刚刚写进去的0X03 */if(data == 0X03)return 0; /* AP3216C正常 */else return 1; /* AP3216C失败 */
}/** @description : 向AP3216C写入数据* @param - addr: 设备地址* @param - reg : 要写入的寄存器* @param - data: 要写入的数据* @return : 操作结果*/
unsigned char ap3216c_writeonebyte(unsigned char addr,unsigned char reg, unsigned char data)
{unsigned char status=0;unsigned char writedata=data;struct i2c_transfer masterXfer;/* 配置I2C xfer结构体 */masterXfer.slaveAddress = addr; /* 设备地址 */masterXfer.direction = kI2C_Write; /* 写入数据 */masterXfer.subaddress = reg; /* 要写入的寄存器地址 */masterXfer.subaddressSize = 1; /* 地址长度一个字节 */masterXfer.data = &writedata; /* 要写入的数据 */masterXfer.dataSize = 1; /* 写入数据长度1个字节 */if(i2c_master_transfer(I2C1, &masterXfer))status=1;return status;
}/** @description : 从AP3216C读取一个字节的数据* @param - addr: 设备地址* @param - reg : 要读取的寄存器* @return : 读取到的数据。*/
unsigned char ap3216c_readonebyte(unsigned char addr,unsigned char reg)
{unsigned char val=0;struct i2c_transfer masterXfer; masterXfer.slaveAddress = addr; /* 设备地址 */masterXfer.direction = kI2C_Read; /* 读取数据 */masterXfer.subaddress = reg; /* 要读取的寄存器地址 */masterXfer.subaddressSize = 1; /* 地址长度一个字节 */masterXfer.data = &val; /* 接收数据缓冲区 */masterXfer.dataSize = 1; /* 读取数据长度1个字节 */i2c_master_transfer(I2C1, &masterXfer);return val;
}/** @description : 读取AP3216C的数据,读取原始数据,包括ALS,PS和IR, 注意!* : 如果同时打开ALS,IR+PS的话两次数据读取的时间间隔要大于112.5ms* @param - ir : ir数据* @param - ps : ps数据* @param - ps : als数据 * @return : 无。*/
void ap3216c_readdata(unsigned short *ir, unsigned short *ps, unsigned short *als)
{unsigned char buf[6];unsigned char i;/* 循环读取所有传感器数据 */for(i = 0; i < 6; i++) {buf[i] = ap3216c_readonebyte(AP3216C_ADDR, AP3216C_IRDATALOW + i); }if(buf[0] & 0X80) /* IR_OF位为1,则数据无效 */*ir = 0; else /* 读取IR传感器的数据 */*ir = ((unsigned short)buf[1] << 2) | (buf[0] & 0X03); *als = ((unsigned short)buf[3] << 8) | buf[2]; /* 读取ALS传感器的数据 */ if(buf[4] & 0x40) /* IR_OF位为1,则数据无效 */*ps = 0; else /* 读取PS传感器的数据 */*ps = ((unsigned short)(buf[5] & 0X3F) << 4) | (buf[4] & 0X0F);
}
//bsp_ap3216c.h
#ifndef _BSP_AP3216C_H
#define _BSP_AP3216C_H
#include "imx6ul.h"#define AP3216C_ADDR 0X1E /* AP3216C器件地址 *//* AP3316C寄存器 */
#define AP3216C_SYSTEMCONG 0x00 /* 配置寄存器 */
#define AP3216C_INTSTATUS 0X01 /* 中断状态寄存器 */
#define AP3216C_INTCLEAR 0X02 /* 中断清除寄存器 */
#define AP3216C_IRDATALOW 0x0A /* IR数据低字节 */
#define AP3216C_IRDATAHIGH 0x0B /* IR数据高字节 */
#define AP3216C_ALSDATALOW 0x0C /* ALS数据低字节 */
#define AP3216C_ALSDATAHIGH 0X0D /* ALS数据高字节 */
#define AP3216C_PSDATALOW 0X0E /* PS数据低字节 */
#define AP3216C_PSDATAHIGH 0X0F /* PS数据高字节 *//* 函数声明 */
unsigned char ap3216c_init(void);
unsigned char ap3216c_readonebyte(unsigned char addr,unsigned char reg);
unsigned char ap3216c_writeonebyte(unsigned char addr,unsigned char reg, unsigned char data);
void ap3216c_readdata(unsigned short *ir, unsigned short *ps, unsigned short *als);#endif
//main.c
/**************************************************************
描述 : I.MX6U开发板裸机实验18 IIC实验
其他 : IIC是最常用的接口,ZERO开发板上有多个IIC外设,本实验就来学习如何驱动I.MX6U的IIC接口,并且通过IIC接口读取板载AP3216C的数据值。
**************************************************************/
#include "bsp_clk.h"
#include "bsp_delay.h"
#include "bsp_led.h"
#include "bsp_beep.h"
#include "bsp_key.h"
#include "bsp_int.h"
#include "bsp_uart.h"
#include "bsp_lcd.h"
#include "bsp_rtc.h"
#include "bsp_ap3216c.h"
#include "stdio.h"/** @description : main函数* @param : 无* @return : 无*/
int main(void)
{unsigned short ir, als, ps;unsigned char state = OFF;int_init(); /* 初始化中断(一定要最先调用!) */imx6u_clkinit(); /* 初始化系统时钟 */delay_init(); /* 初始化延时 */clk_enable(); /* 使能所有的时钟 */led_init(); /* 初始化led */beep_init(); /* 初始化beep */uart_init(); /* 初始化串口,波特率115200 */lcd_init(); /* 初始化LCD */tftlcd_dev.forecolor = LCD_RED; lcd_show_string(30, 50, 200, 16, 16, (char*)"ZERO-IMX6U IIC TEST"); lcd_show_string(30, 70, 200, 16, 16, (char*)"AP3216C TEST"); lcd_show_string(30, 90, 200, 16, 16, (char*)"ATOM@ALIENTEK"); lcd_show_string(30, 110, 200, 16, 16, (char*)"2019/3/26"); while(ap3216c_init()) /* 检测不到AP3216C */{lcd_show_string(30, 130, 200, 16, 16, (char*)"AP3216C Check Failed!");delayms(500);lcd_show_string(30, 130, 200, 16, 16, (char*)"Please Check! ");delayms(500);} lcd_show_string(30, 130, 200, 16, 16, (char*)"AP3216C Ready!"); lcd_show_string(30, 160, 200, 16, 16, (char*)" IR:"); lcd_show_string(30, 180, 200, 16, 16, (char*)" PS:"); lcd_show_string(30, 200, 200, 16, 16, (char*)"ALS:"); tftlcd_dev.forecolor = LCD_BLUE; while(1) {ap3216c_readdata(&ir, &ps, &als); /* 读取数据 */lcd_shownum(30 + 32, 160, ir, 5, 16); /* 显示IR数据 */lcd_shownum(30 + 32, 180, ps, 5, 16); /* 显示PS数据 */lcd_shownum(30 + 32, 200, als, 5, 16); /* 显示ALS数据 */ delayms(120);state = !state;led_switch(LED0,state); }return 0;
}
相关文章:

39. I2C实验
一、IIC协议详解 1、ALPHA开发板上有个AP3216C,这是一个IIC接口的器件,这是一个环境光传感器。AP3216C连接到了I2C1上: I2C1_SCL: 使用的是UART4_TXD这个IO,复用位ALT2 I2C1_SDA: 使用的是UART4_RXD这个IO。复用为ALT2 2、I2C分为SCL和SDA&…...

GPIO配置通用输出,推挽输出,开漏输出的作用,以及输出上下拉起到的作用
通用输出说明: ①输出原理: 对输出数据寄存器的对应位写0 或 1,就可以控制对应编号的IO口输出低/高电平 ②输出类型 推挽输出:IO口可以输出高电平,也可以输出低电平 开漏输出:IO口只能输出低电平 所以…...

Spring AOP 入门教程:基础概念与实现
目录 第一章:AOP概念的引入 第二章:AOP相关的概念 1. AOP概述 2. AOP的优势 3. AOP的底层原理 第三章:Spring的AOP技术 - 配置文件方式 1. AOP相关的术语 2. AOP配置文件方式入门 3. 切入点的表达式 4. AOP的通知类型 第四章&#x…...

DeepSeek 核心技术全景解析
DeepSeek 核心技术全景解析:突破性创新背后的设计哲学 DeepSeek的创新不仅仅是对AI基础架构的改进,更是一场范式革命。本文将深入剖析其核心技术,探讨 如何突破 Transformer 计算瓶颈、如何在 MoE(Mixture of Experts)…...

90,【6】攻防世界 WEB Web_php_unserialize
进入靶场 进入靶场 <?php // 定义一个名为 Demo 的类 class Demo { // 定义一个私有属性 $file,默认值为 index.phpprivate $file index.php;// 构造函数,当创建类的实例时会自动调用// 接收一个参数 $file,用于初始化对象的 $file 属…...

实现网站内容快速被搜索引擎收录的方法
本文转自:百万收录网 原文链接:https://www.baiwanshoulu.com/6.html 实现网站内容快速被搜索引擎收录,是网站运营和推广的重要目标之一。以下是一些有效的方法,可以帮助网站内容更快地被搜索引擎发现和收录: 一、确…...

WSL2中安装的ubuntu搭建tftp服务器uboot通过tftp下载
Windows中安装wsl2,wsl2里安装ubuntu。 1. Wsl启动后 1)Windows下ip ipconfig 以太网适配器 vEthernet (WSL (Hyper-V firewall)): 连接特定的 DNS 后缀 . . . . . . . : IPv4 地址 . . . . . . . . . . . . : 172.19.32.1 子网掩码 . . . . . . . .…...

机器学习优化算法:从梯度下降到Adam及其变种
机器学习优化算法:从梯度下降到Adam及其变种 引言 最近deepseek的爆火已然说明,在机器学习领域,优化算法是模型训练的核心驱动力。无论是简单的线性回归还是复杂的深度神经网络,优化算法的选择直接影响模型的收敛速度、泛化性能…...

[SAP ABAP] 静态断点的使用
在 ABAP 编程环境中,静态断点通过关键字BREAK-POINT实现,当程序执行到这一语句时,会触发调试器中断程序的运行,允许开发人员检查当前状态并逐步跟踪后续代码逻辑 通常情况下,在代码的关键位置插入静态断点可以帮助开发…...

129.求根节点到叶节点数字之和(遍历思想)
Problem: 129.求根节点到叶节点数字之和 文章目录 题目描述思路复杂度Code 题目描述 思路 遍历思想(利用二叉树的先序遍历) 直接利用二叉树的先序遍历,将遍历过程中的节点值先利用字符串拼接起来遇到根节点时再转为数字并累加起来,在归的过程中…...
NCCL、HCCL、通信、优化
文章目录 从硬件PCIE、NVLINK、RDMA原理到通信NCCL、MPI原理!通信实现方式:机器内通信、机器间通信通信实现方式:通讯协调通信实现方式:机器内通信:PCIe通信实现方式:机器内通信:NVLink通信实现…...

unity学习21:Application类与文件存储的位置
目录 1 unity是一个跨平台的引擎 1.1 使用 Application类,去读写文件 1.2 路径特点 1.2.1 相对位置/相对路径: 1.2.2 固定位置/绝对路径: 1.3 测试方法,仍然挂一个C#脚本在gb上 2 游戏数据文件夹路径(只读&…...

17 一个高并发的系统架构如何设计
高并发系统的理解 第一:我们设计高并发系统的前提是该系统要高可用,起码整体上的高可用。 第二:高并发系统需要面对很大的流量冲击,包括瞬时的流量和黑客攻击等 第三:高并发系统常见的需要考虑的问题,如内存不足的问题,服务抖动的…...

Spring Boot 实例解析:配置文件
SpringBoot 的热部署: Spring 为开发者提供了一个名为 spring-boot-devtools 的模块来使用 SpringBoot 应用支持热部署,提高开发者的效率,无需手动重启 SpringBoot 应用引入依赖: <dependency> <groupId>org.springfr…...

pytorch图神经网络处理图结构数据
人工智能例子汇总:AI常见的算法和例子-CSDN博客 图神经网络(Graph Neural Networks,GNNs)是一类能够处理图结构数据的深度学习模型。图结构数据由节点(vertices)和边(edges)组成&a…...
)
计算机网络一点事(23)
传输层 端口作用:标识主机特定进程,TCP,UDP协议 端口号分类:服务器:0-1023,熟知 1024-49151 登记 客户端:49152-65535 功能:实现端到端,进程到进程的通信,…...

(9)下:学习与验证 linux 里的 epoll 对象里的 EPOLLIN、 EPOLLHUP 与 EPOLLRDHUP 的不同。小例子的实验
(4)本实验代码的蓝本,是伊圣雨老师里的课本里的代码,略加改动而来的。 以下是 服务器端的代码: 每当收到客户端的报文时,就测试一下对应的 epoll 事件里的事件标志,不读取报文内容,…...

DeepSeek-R1模型1.5b、7b、8b、14b、32b、70b和671b有啥区别?
deepseek-r1的1.5b、7b、8b、14b、32b、70b和671b有啥区别?码笔记mabiji.com分享:1.5B、7B、8B、14B、32B、70B是蒸馏后的小模型,671B是基础大模型,它们的区别主要体现在参数规模、模型容量、性能表现、准确性、训练成本、推理成本…...

一、html笔记
(一)前端概述 1、定义 前端是Web应用程序的前台部分,运行在PC端、移动端等浏览器上,展现给用户浏览的网页。通过HTML、CSS、JavaScript等技术实现,是用户能够直接看到和操作的界面部分。上网就是下载html文档,浏览器是一个解释器,运行从服务器下载的html文件,解析html、…...

AI大模型开发原理篇-2:语言模型雏形之词袋模型
基本概念 词袋模型(Bag of Words,简称 BOW)是自然语言处理和信息检索等领域中一种简单而常用的文本表示方法,它将文本看作是一组单词的集合,并忽略文本中的语法、词序等信息,仅关注每个词的出现频率。 文本…...

【网络】每天掌握一个Linux命令 - iftop
在Linux系统中,iftop是网络管理的得力助手,能实时监控网络流量、连接情况等,帮助排查网络异常。接下来从多方面详细介绍它。 目录 【网络】每天掌握一个Linux命令 - iftop工具概述安装方式核心功能基础用法进阶操作实战案例面试题场景生产场景…...

java调用dll出现unsatisfiedLinkError以及JNA和JNI的区别
UnsatisfiedLinkError 在对接硬件设备中,我们会遇到使用 java 调用 dll文件 的情况,此时大概率出现UnsatisfiedLinkError链接错误,原因可能有如下几种 类名错误包名错误方法名参数错误使用 JNI 协议调用,结果 dll 未实现 JNI 协…...

LeetCode - 199. 二叉树的右视图
题目 199. 二叉树的右视图 - 力扣(LeetCode) 思路 右视图是指从树的右侧看,对于每一层,只能看到该层最右边的节点。实现思路是: 使用深度优先搜索(DFS)按照"根-右-左"的顺序遍历树记录每个节点的深度对于…...

SQL慢可能是触发了ring buffer
简介 最近在进行 postgresql 性能排查的时候,发现 PG 在某一个时间并行执行的 SQL 变得特别慢。最后通过监控监观察到并行发起得时间 buffers_alloc 就急速上升,且低水位伴随在整个慢 SQL,一直是 buferIO 的等待事件,此时也没有其他会话的争抢。SQL 虽然不是高效 SQL ,但…...
提供了哪些便利?)
现有的 Redis 分布式锁库(如 Redisson)提供了哪些便利?
现有的 Redis 分布式锁库(如 Redisson)相比于开发者自己基于 Redis 命令(如 SETNX, EXPIRE, DEL)手动实现分布式锁,提供了巨大的便利性和健壮性。主要体现在以下几个方面: 原子性保证 (Atomicity)ÿ…...

【Linux】Linux安装并配置RabbitMQ
目录 1. 安装 Erlang 2. 安装 RabbitMQ 2.1.添加 RabbitMQ 仓库 2.2.安装 RabbitMQ 3.配置 3.1.启动和管理服务 4. 访问管理界面 5.安装问题 6.修改密码 7.修改端口 7.1.找到文件 7.2.修改文件 1. 安装 Erlang 由于 RabbitMQ 是用 Erlang 编写的,需要先安…...
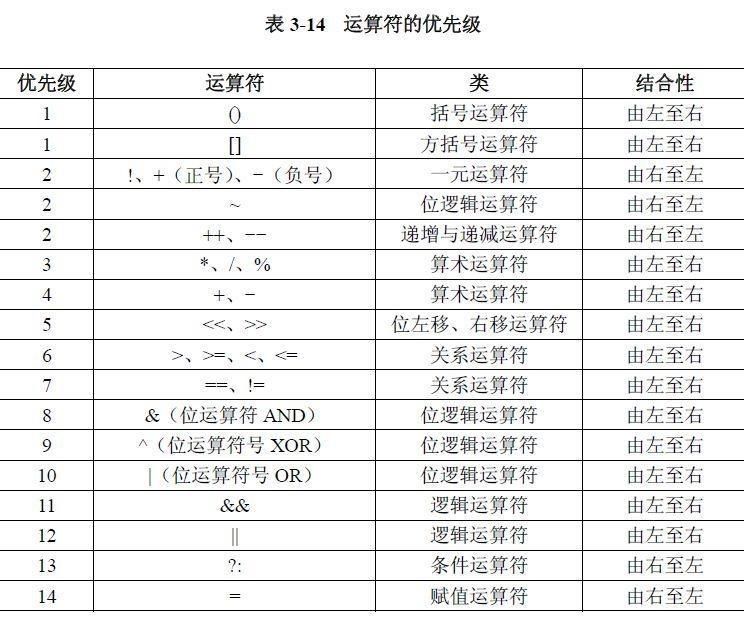
02.运算符
目录 什么是运算符 算术运算符 1.基本四则运算符 2.增量运算符 3.自增/自减运算符 关系运算符 逻辑运算符 &&:逻辑与 ||:逻辑或 !:逻辑非 短路求值 位运算符 按位与&: 按位或 | 按位取反~ …...

解析“道作为序位生成器”的核心原理
解析“道作为序位生成器”的核心原理 以下完整展开道函数的零点调控机制,重点解析"道作为序位生成器"的核心原理与实现框架: 一、道函数的零点调控机制 1. 道作为序位生成器 道在认知坐标系$(x_{\text{物}}, y_{\text{意}}, z_{\text{文}}…...

EasyRTC音视频实时通话功能在WebRTC与智能硬件整合中的应用与优势
一、WebRTC与智能硬件整合趋势 随着物联网和实时通信需求的爆发式增长,WebRTC作为开源实时通信技术,为浏览器与移动应用提供免插件的音视频通信能力,在智能硬件领域的融合应用已成必然趋势。智能硬件不再局限于单一功能,对实时…...

【QT控件】显示类控件
目录 一、Label 二、LCD Number 三、ProgressBar 四、Calendar Widget QT专栏:QT_uyeonashi的博客-CSDN博客 一、Label QLabel 可以用来显示文本和图片. 核心属性如下 代码示例: 显示不同格式的文本 1) 在界面上创建三个 QLabel 尺寸放大一些. objectName 分别…...