定时器按键tim_key模版
低优先级放在高优先级内势必是程序卡死

 把高优先级放到低优先级内,会使程序卡死
把高优先级放到低优先级内,会使程序卡死

可修改
Debuger调试方法




 Pwm
Pwm

 rcc
rcc

#include "my_main.h"
uint8_t led_sta=0x10;
char text[30];
void LED_Disp(uint8_t dsLED)
{HAL_GPIO_WritePin(GPIOC,GPIO_PIN_All,GPIO_PIN_SET);//所有LED熄灭(l小写)HAL_GPIO_WritePin(GPIOC,dsLED<<8,GPIO_PIN_RESET);//左移8位:控制C8-15引脚,值为1的点亮HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);//开锁存器HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);//关锁存器
}
void setup()
{HAL_TIM_Base_Start_IT(&htim6);LED_Disp(0x00);//关掉所有LEDLCD_Init();//LCD初始化LCD_Clear(Black);LCD_SetBackColor(Black);LCD_SetTextColor(White);
}void loop()
{/* LCD演示 */sprintf(text," number:%x ",led_sta);LCD_DisplayStringLine(Line8,(uint8_t *)text);//局部刷新
}void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{/* 按键操作演示 */if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0)==GPIO_PIN_RESET){HAL_Delay(10);if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0)==GPIO_PIN_RESET){led_sta=(led_sta&0xfe)|0x01;led_sta=(led_sta&0xfd)|0x00;LED_Disp(led_sta); }}if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1)==GPIO_PIN_RESET){HAL_Delay(10);if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1)==GPIO_PIN_RESET){led_sta=(led_sta&0xfd)|0x02;led_sta=(led_sta&0xfe)|0x00;LED_Disp(led_sta); }} }
key_tim2
#include "key.h"#ifndef _KEY_H_
#define _KEY_H_#include "my_main.h"
struct Bkeys
{uint16_t age;uint8_t short_flag;uint8_t long_flag;uint8_t press;uint8_t double_ageEN;uint8_t double_age;uint8_t double_flag;
};
void key_serv(void);
void key_serv_long(void);
void key_serv_double(void);
#endifstruct Bkeys bkey[5]={0,0,0,0,0,0,0};uint8_t key_read()
{if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0)==0) return 1;else if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1)==0) return 2;else if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2)==0) return 3;else if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==0) return 4;else return 0;
}void key_serv()
{uint8_t key_sta=key_read();if(key_sta!=0){bkey[key_sta].age++;if(bkey[key_sta].age==2)bkey[key_sta].short_flag=1;}else{for(int i=0;i<5;i++) bkey[i].age=0;}
}
/*长按快速增加*/
//void key_serv_long()
//{
// uint8_t key_sta=key_read();
// if(key_sta!=0)
// {
// bkey[key_sta].age++;
// if(bkey[key_sta].age>1)bkey[key_sta].press=1;
// }
// else
// {
// for(int i=0;i<5;i++)
// {
// if(bkey[i].press==1&&bkey[i].long_flag==0)
// bkey[i].short_flag=1;
//
// bkey[i].press=0;
// bkey[i].age=0;
// bkey[i].long_flag=0;
// }
// }
// if(bkey[key_sta].age>69)bkey[key_sta].long_flag=1;
//}
/*长按后抬起执行*/
void key_serv_long()
{uint8_t key_sta=key_read();if(key_sta!=0){bkey[key_sta].age++;if(bkey[key_sta].age>1)bkey[key_sta].press=1;}else{for(int i=0;i<5;i++) {if(bkey[i].age>69)bkey[i].long_flag=1;if(bkey[i].press==1&&bkey[i].long_flag==0)bkey[i].short_flag=1;bkey[i].press=0;bkey[i].age=0;}}
}
/*融合按键双击*/
void key_serv_double()
{uint8_t key_sta=key_read();if(key_sta!=0){bkey[key_sta].age++;if(bkey[key_sta].age>1)bkey[key_sta].press=1;}else{for(int i=0;i<5;i++) {if(bkey[i].double_ageEN==1&&bkey[i].press==1){bkey[i].double_flag=1;bkey[i].press=0;bkey[i].double_ageEN=0; }if(bkey[i].press==1&&bkey[i].long_flag==0)bkey[i].double_ageEN=1;if(bkey[i].double_ageEN==1)bkey[i].double_age++;if(bkey[i].double_ageEN==1&&bkey[i].double_age>20){bkey[i].short_flag=1;bkey[i].double_age=0;bkey[i].double_ageEN=0;}bkey[i].press=0;bkey[i].age=0;bkey[i].long_flag=0;}}if(bkey[key_sta].age>69)bkey[key_sta].long_flag=1;
}
//PWM模版
/-----------------------------------------key------------------------------------------------------/
#include "key.h"struct Bkeys bkey[5]={0,0,0,0};uint8_t key_read()
{if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0)==0) return 1;else if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1)==0) return 2;else if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2)==0) return 3;else if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==0) return 4;else return 0;
}void key_serv()
{uint8_t key_sta=key_read();if(key_sta!=0){bkey[key_sta].age++;if(bkey[key_sta].age>1)bkey[key_sta].short_flag=1;}else{for(int i=0;i<5;i++) bkey[i].age=0;}
}
/*长按快速增加功能*/
void key_serv_long()
{uint8_t key_sta=key_read();if(key_sta!=0){bkey[key_sta].age++;if(bkey[key_sta].age>1) bkey[key_sta].press=1;}else{for(int i=0;i<5;i++) {if(bkey[i].press==1&&bkey[i].long_flag==0)bkey[i].short_flag=1;bkey[i].age=0;bkey[i].press=0;bkey[i].long_flag=0;}}if(bkey[key_sta].age>69) bkey[key_sta].long_flag=1;
}
/*长按后抬起执行*/
//void key_serv_long()
//{
// uint8_t key_sta=key_read();
// if(key_sta!=0)
// {
// bkey[key_sta].age++;
// if(bkey[key_sta].age>1) bkey[key_sta].press=1;
// }
// else
// {
// for(int i=0;i<5;i++)
// {
// if(bkey[i].age>69) bkey[i].long_flag=1;
// if(bkey[i].press==1&&bkey[i].long_flag==0)
// bkey[i].short_flag=1;
// bkey[i].age=0;
// bkey[i].press=0;
// }
// }
//}void key_serv_double()
{uint8_t key_sta=key_read();if(key_sta!=0){bkey[key_sta].age++;if(bkey[key_sta].age>1) bkey[key_sta].press=1;}else{for(int i=0;i<5;i++) {if(bkey[i].double_ageEN==1&&bkey[i].press==1){bkey[i].double_flag=1;bkey[i].double_ageEN=0;bkey[i].press=0;}if(bkey[i].press&&bkey[i].long_flag==0){bkey[i].double_ageEN=1;}if(bkey[i].double_ageEN==1)bkey[i].double_age++;if(bkey[i].double_ageEN==1&&bkey[i].double_age>20){bkey[i].short_flag=1;bkey[i].double_ageEN=0;bkey[i].double_age=0;}bkey[i].age=0;bkey[i].press=0;bkey[i].long_flag=0;}}if(bkey[key_sta].age>69) bkey[key_sta].long_flag=1;
}
#include "my_main.h"
uint8_t led_sta=0x10;
char text[30];
extern struct Bkeys bkey[];void LED_Disp(uint8_t dsLED)
{HAL_GPIO_WritePin(GPIOC,GPIO_PIN_All,GPIO_PIN_SET);//所有LED熄灭(l小写)HAL_GPIO_WritePin(GPIOC,dsLED<<8,GPIO_PIN_RESET);//左移8位:控制C8-15引脚,值为1的点亮HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);//开锁存器HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);//关锁存器
}
void setup()
{HAL_TIM_Base_Start_IT(&htim6);HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_2);LED_Disp(0x00);//关掉所有LEDLCD_Init();//LCD初始化LCD_Clear(Black);LCD_SetBackColor(Black);LCD_SetTextColor(White);
}void loop()
{static uint16_t temp=0;if(bkey[1].short_flag==1){/* LCD演示 */sprintf(text," KEY_1 down! ");LCD_DisplayStringLine(Line8,(uint8_t *)text);//局部刷新 __HAL_TIM_SET_AUTORELOAD(&htim2,250-1);__HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_2,125);bkey[1].short_flag=0;} if(bkey[2].short_flag==1){/* LCD演示 */sprintf(text," KEY_2 down! ");LCD_DisplayStringLine(Line8,(uint8_t *)text);//局部刷新 bkey[2].short_flag=0;} /*长按快速增加功能*/if(bkey[1].long_flag==1){/* LCD演示 */sprintf(text," KEY_1 long!,%d ",temp++);LCD_DisplayStringLine(Line8,(uint8_t *)text);//局部刷新 } if(bkey[1].double_flag==1){/* LCD演示 */sprintf(text," KEY_1 double! ");LCD_DisplayStringLine(Line8,(uint8_t *)text);//局部刷新 bkey[1].double_flag=0;} /*长按后抬起执行*/
// if(bkey[1].long_flag==1)
// {
// /* LCD演示 */
// sprintf(text," KEY_1 long! ");
// LCD_DisplayStringLine(Line8,(uint8_t *)text);//局部刷新
// bkey[1].long_flag=0;
// }
}void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{if(htim->Instance==TIM6)key_serv_double();
}
TIM_CAP+systick
/---------------------------key----------------------------------/
#include "key.h"struct Bkeys bkey[5]={0,0,0,0};uint8_t key_read()
{if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0)==0) return 1;else if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1)==0) return 2;else if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2)==0) return 3;else if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==0) return 4;else return 0;
}void key_serv()
{uint8_t key_sta=key_read();if(key_sta!=0){bkey[key_sta].age++;if(bkey[key_sta].age>1)bkey[key_sta].short_flag=1;}else{for(int i=0;i<5;i++) bkey[i].age=0;}
}
/*长按快速增加功能*/
void key_serv_long()
{uint8_t key_sta=key_read();if(key_sta!=0){bkey[key_sta].age++;if(bkey[key_sta].age>1) bkey[key_sta].press=1;}else{for(int i=0;i<5;i++) {if(bkey[i].press==1&&bkey[i].long_flag==0)bkey[i].short_flag=1;bkey[i].age=0;bkey[i].press=0;bkey[i].long_flag=0;}}if(bkey[key_sta].age>69) bkey[key_sta].long_flag=1;
}
/*长按后抬起执行*/
//void key_serv_long()
//{
// uint8_t key_sta=key_read();
// if(key_sta!=0)
// {
// bkey[key_sta].age++;
// if(bkey[key_sta].age>1) bkey[key_sta].press=1;
// }
// else
// {
// for(int i=0;i<5;i++)
// {
// if(bkey[i].age>69) bkey[i].long_flag=1;
// if(bkey[i].press==1&&bkey[i].long_flag==0)
// bkey[i].short_flag=1;
// bkey[i].age=0;
// bkey[i].press=0;
// }
// }
//}void key_serv_double()
{uint8_t key_sta=key_read();if(key_sta!=0){bkey[key_sta].age++;if(bkey[key_sta].age>1) bkey[key_sta].press=1;}else{for(int i=0;i<5;i++) {if(bkey[i].double_ageEN==1&&bkey[i].press==1){bkey[i].double_flag=1;bkey[i].double_ageEN=0;bkey[i].press=0;}if(bkey[i].press&&bkey[i].long_flag==0){bkey[i].double_ageEN=1;}if(bkey[i].double_ageEN==1)bkey[i].double_age++;if(bkey[i].double_ageEN==1&&bkey[i].double_age>20){bkey[i].short_flag=1;bkey[i].double_ageEN=0;bkey[i].double_age=0;}bkey[i].age=0;bkey[i].press=0;bkey[i].long_flag=0;}}if(bkey[key_sta].age>69) bkey[key_sta].long_flag=1;
}
#include "my_main.h"
uint8_t led_sta=0x10;
char text[30];
extern struct Bkeys bkey[];
uint32_t time500ms;void LED_Disp(uint8_t dsLED)
{HAL_GPIO_WritePin(GPIOC,GPIO_PIN_All,GPIO_PIN_SET);//所有LED熄灭(l小写)HAL_GPIO_WritePin(GPIOC,dsLED<<8,GPIO_PIN_RESET);//左移8位:控制C8-15引脚,值为1的点亮HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);//开锁存器HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);//关锁存器
}
void LED_Chg(uint8_t num,uint8_t sta)
{uint8_t pos=0x01<<(num-1);led_sta=(led_sta&(~pos))|(pos*sta);LED_Disp(led_sta);
}
void setup()
{HAL_TIM_Base_Start_IT(&htim6);HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_2);//TIM15_CH1输入演示HAL_TIM_IC_Start(&htim15,TIM_CHANNEL_1);HAL_TIM_IC_Start(&htim15,TIM_CHANNEL_2);//TIM3_CH2输入演示HAL_TIM_IC_Start(&htim3,TIM_CHANNEL_1);HAL_TIM_IC_Start(&htim3,TIM_CHANNEL_2);LED_Disp(0x00);//关掉所有LEDLCD_Init();//LCD初始化LCD_Clear(Black);LCD_SetBackColor(Black);LCD_SetTextColor(White);time500ms=uwTick;
}void loop()
{static uint16_t temp=0;float frq1,frq2=0;float duty1,duty2=0;frq1=1000000.0f/(HAL_TIM_ReadCapturedValue(&htim15,TIM_CHANNEL_1)+1);duty1=((HAL_TIM_ReadCapturedValue(&htim15,TIM_CHANNEL_2)+1)*100.0f/((HAL_TIM_ReadCapturedValue(&htim15,TIM_CHANNEL_1)+1)));sprintf(text,"FRQ:%.2fHz ",frq1);LCD_DisplayStringLine(Line1,(uint8_t *)text);//局部刷新 sprintf(text,"DUTY:%.2f%% ",duty1);LCD_DisplayStringLine(Line2,(uint8_t *)text);//局部刷新 frq2=1000000.0f/(HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_2)+1);duty2=((HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_1)+1)*100.0f/((HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_2)+1)));sprintf(text,"FRQ2:%.2fHz ",frq2);LCD_DisplayStringLine(Line3,(uint8_t *)text);//局部刷新 sprintf(text,"DUTY2:%.2f%% ",duty2);LCD_DisplayStringLine(Line4,(uint8_t *)text);//局部刷新 if(uwTick-time500ms>500){static uint8_t LED_sta=0;LED_Chg(2,LED_sta);LED_sta=!LED_sta;time500ms=uwTick;}if(bkey[1].short_flag==1){/* LCD演示 */sprintf(text," KEY_1 down! ");LCD_DisplayStringLine(Line8,(uint8_t *)text);//局部刷新 __HAL_TIM_SET_AUTORELOAD(&htim2,250-1);__HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_2,125);bkey[1].short_flag=0;} if(bkey[2].short_flag==1){/* LCD演示 */sprintf(text," KEY_2 down! ");LCD_DisplayStringLine(Line8,(uint8_t *)text);//局部刷新 bkey[2].short_flag=0;} /*长按快速增加功能*/if(bkey[1].long_flag==1){/* LCD演示 */sprintf(text," KEY_1 long!,%d ",temp++);LCD_DisplayStringLine(Line8,(uint8_t *)text);//局部刷新 } if(bkey[1].double_flag==1){/* LCD演示 */sprintf(text," KEY_1 double! ");LCD_DisplayStringLine(Line8,(uint8_t *)text);//局部刷新 bkey[1].double_flag=0;} /*长按后抬起执行*/
// if(bkey[1].long_flag==1)
// {
// /* LCD演示 */
// sprintf(text," KEY_1 long! ");
// LCD_DisplayStringLine(Line8,(uint8_t *)text);//局部刷新
// bkey[1].long_flag=0;
// }
}void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{if(htim->Instance==TIM6)key_serv_double();
}
RTC实验
#include "my_main.h"
uint8_t led_sta=0x10;
char text[30];
extern struct Bkeys bkey[];void LED_Disp(uint8_t dsLED)
{HAL_GPIO_WritePin(GPIOC,GPIO_PIN_All,GPIO_PIN_SET);//所有LED熄灭(l小写)HAL_GPIO_WritePin(GPIOC,dsLED<<8,GPIO_PIN_RESET);//左移8位:控制C8-15引脚,值为1的点亮HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);//开锁存器HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);//关锁存器
}
void setup()
{HAL_TIM_Base_Start_IT(&htim6);HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_2);//TIM15_CH1输入演示HAL_TIM_IC_Start(&htim15,TIM_CHANNEL_1);HAL_TIM_IC_Start(&htim15,TIM_CHANNEL_2);//TIM3_CH2输入演示HAL_TIM_IC_Start(&htim3,TIM_CHANNEL_1);HAL_TIM_IC_Start(&htim3,TIM_CHANNEL_2);LED_Disp(0x00);//关掉所有LEDLCD_Init();//LCD初始化LCD_Clear(Black);LCD_SetBackColor(Black);LCD_SetTextColor(White);
}void loop()
{static uint16_t temp=0;float frq1,frq2=0;float duty1,duty2=0;RTC_TimeTypeDef time;RTC_DateTypeDef date;HAL_RTC_GetTime(&hrtc,&time,RTC_FORMAT_BIN);HAL_RTC_GetDate(&hrtc,&date,RTC_FORMAT_BIN);sprintf(text,"time:%d:%d:%d ",time.Hours,time.Minutes,time.Seconds);LCD_DisplayStringLine(Line9,(uint8_t *)text);//局部刷新 frq1=1000000.0f/(HAL_TIM_ReadCapturedValue(&htim15,TIM_CHANNEL_1)+1);duty1=((HAL_TIM_ReadCapturedValue(&htim15,TIM_CHANNEL_2)+1)*100.0f/((HAL_TIM_ReadCapturedValue(&htim15,TIM_CHANNEL_1)+1)));sprintf(text,"FRQ:%.2fHz ",frq1);LCD_DisplayStringLine(Line1,(uint8_t *)text);//局部刷新 sprintf(text,"DUTY:%.2f%% ",duty1);LCD_DisplayStringLine(Line2,(uint8_t *)text);//局部刷新 frq2=1000000.0f/(HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_2)+1);duty2=((HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_1)+1)*100.0f/((HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_2)+1)));sprintf(text,"FRQ2:%.2fHz ",frq2);LCD_DisplayStringLine(Line3,(uint8_t *)text);//局部刷新 sprintf(text,"DUTY2:%.2f%% ",duty2);LCD_DisplayStringLine(Line4,(uint8_t *)text);//局部刷新 if(bkey[1].short_flag==1){/* LCD演示 */sprintf(text," KEY_1 down! ");LCD_DisplayStringLine(Line8,(uint8_t *)text);//局部刷新 __HAL_TIM_SET_AUTORELOAD(&htim2,250-1);__HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_2,125);bkey[1].short_flag=0;} if(bkey[2].short_flag==1){/* LCD演示 */sprintf(text," KEY_2 down! ");LCD_DisplayStringLine(Line8,(uint8_t *)text);//局部刷新 bkey[2].short_flag=0;} /*长按快速增加功能*/if(bkey[1].long_flag==1){/* LCD演示 */sprintf(text," KEY_1 long!,%d ",temp++);LCD_DisplayStringLine(Line8,(uint8_t *)text);//局部刷新 } if(bkey[1].double_flag==1){/* LCD演示 */sprintf(text," KEY_1 double! ");LCD_DisplayStringLine(Line8,(uint8_t *)text);//局部刷新 bkey[1].double_flag=0;} /*长按后抬起执行*/
// if(bkey[1].long_flag==1)
// {
// /* LCD演示 */
// sprintf(text," KEY_1 long! ");
// LCD_DisplayStringLine(Line8,(uint8_t *)text);//局部刷新
// bkey[1].long_flag=0;
// }
}void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{if(htim->Instance==TIM6)key_serv_double();
}
key
#include "key.h"struct Bkeys bkey[5]={0,0,0,0};uint8_t key_read()
{if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0)==0) return 1;else if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1)==0) return 2;else if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2)==0) return 3;else if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==0) return 4;else return 0;
}void key_serv()
{uint8_t key_sta=key_read();if(key_sta!=0){bkey[key_sta].age++;if(bkey[key_sta].age>1)bkey[key_sta].short_flag=1;}else{for(int i=0;i<5;i++) bkey[i].age=0;}
}
/*长按快速增加功能*/
void key_serv_long()
{uint8_t key_sta=key_read();if(key_sta!=0){bkey[key_sta].age++;if(bkey[key_sta].age>1) bkey[key_sta].press=1;}else{for(int i=0;i<5;i++) {if(bkey[i].press==1&&bkey[i].long_flag==0)bkey[i].short_flag=1;bkey[i].age=0;bkey[i].press=0;bkey[i].long_flag=0;}}if(bkey[key_sta].age>69) bkey[key_sta].long_flag=1;
}
/*长按后抬起执行*/
//void key_serv_long()
//{
// uint8_t key_sta=key_read();
// if(key_sta!=0)
// {
// bkey[key_sta].age++;
// if(bkey[key_sta].age>1) bkey[key_sta].press=1;
// }
// else
// {
// for(int i=0;i<5;i++)
// {
// if(bkey[i].age>69) bkey[i].long_flag=1;
// if(bkey[i].press==1&&bkey[i].long_flag==0)
// bkey[i].short_flag=1;
// bkey[i].age=0;
// bkey[i].press=0;
// }
// }
//}void key_serv_double()
{uint8_t key_sta=key_read();if(key_sta!=0){bkey[key_sta].age++;if(bkey[key_sta].age>1) bkey[key_sta].press=1;}else{for(int i=0;i<5;i++) {if(bkey[i].double_ageEN==1&&bkey[i].press==1){bkey[i].double_flag=1;bkey[i].double_ageEN=0;bkey[i].press=0;}if(bkey[i].press&&bkey[i].long_flag==0){bkey[i].double_ageEN=1;}if(bkey[i].double_ageEN==1)bkey[i].double_age++;if(bkey[i].double_ageEN==1&&bkey[i].double_age>20){bkey[i].short_flag=1;bkey[i].double_ageEN=0;bkey[i].double_age=0;}bkey[i].age=0;bkey[i].press=0;bkey[i].long_flag=0;}}if(bkey[key_sta].age>69) bkey[key_sta].long_flag=1;
}
adc相关配置及代码
#include "my_main.h"
uint8_t led_sta=0x10;
char text[30];
extern struct Bkeys bkey[];void LED_Disp(uint8_t dsLED)
{HAL_GPIO_WritePin(GPIOC,GPIO_PIN_All,GPIO_PIN_SET);//所有LED熄灭(l小写)HAL_GPIO_WritePin(GPIOC,dsLED<<8,GPIO_PIN_RESET);//左移8位:控制C8-15引脚,值为1的点亮HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);//开锁存器HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);//关锁存器
}
float adc_read(ADC_HandleTypeDef *hadc)
{uint16_t adc_val;float adc_f;HAL_ADC_Start(hadc);adc_val=HAL_ADC_GetValue(hadc);adc_f=adc_val*3.3f/4096.0f;return adc_f;
}
float adc_read_os(ADC_HandleTypeDef *hadc)
{uint16_t adc_val;float adc_f;HAL_ADC_Start(hadc);adc_val=HAL_ADC_GetValue(hadc);adc_f=adc_val*3.3f/65536.0f;return adc_f;
}
void setup()
{HAL_TIM_Base_Start_IT(&htim6);HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_2);//TIM15_CH1输入演示HAL_TIM_IC_Start(&htim15,TIM_CHANNEL_1);HAL_TIM_IC_Start(&htim15,TIM_CHANNEL_2);//TIM3_CH2输入演示HAL_TIM_IC_Start(&htim3,TIM_CHANNEL_1);HAL_TIM_IC_Start(&htim3,TIM_CHANNEL_2);HAL_ADCEx_Calibration_Start(&hadc2,ADC_SINGLE_ENDED);LED_Disp(0x00);//关掉所有LEDLCD_Init();//LCD初始化LCD_Clear(Black);LCD_SetBackColor(Black);LCD_SetTextColor(White);
}void loop()
{static uint16_t temp=0;float frq1,frq2=0;float duty1,duty2=0;float adc_data_PB15;RTC_TimeTypeDef time;RTC_DateTypeDef date;HAL_RTC_GetTime(&hrtc,&time,RTC_FORMAT_BIN);HAL_RTC_GetDate(&hrtc,&date,RTC_FORMAT_BIN);sprintf(text,"time:%d:%d:%d ",time.Hours,time.Minutes,time.Seconds);LCD_DisplayStringLine(Line9,(uint8_t *)text);//局部刷新 frq1=1000000.0f/(HAL_TIM_ReadCapturedValue(&htim15,TIM_CHANNEL_1)+1);duty1=((HAL_TIM_ReadCapturedValue(&htim15,TIM_CHANNEL_2)+1)*100.0f/((HAL_TIM_ReadCapturedValue(&htim15,TIM_CHANNEL_1)+1)));sprintf(text,"FRQ:%.2fHz ",frq1);LCD_DisplayStringLine(Line1,(uint8_t *)text);//局部刷新 sprintf(text,"DUTY:%.2f%% ",duty1);LCD_DisplayStringLine(Line2,(uint8_t *)text);//局部刷新 frq2=1000000.0f/(HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_2)+1);duty2=((HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_1)+1)*100.0f/((HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_2)+1)));sprintf(text,"FRQ2:%.2fHz ",frq2);LCD_DisplayStringLine(Line3,(uint8_t *)text);//局部刷新 sprintf(text,"DUTY2:%.2f%% ",duty2);LCD_DisplayStringLine(Line4,(uint8_t *)text);//局部刷新 adc_data_PB15=adc_read_os(&hadc2);sprintf(text,"PB15:%.4fV ",adc_data_PB15);LCD_DisplayStringLine(Line5,(uint8_t *)text);//局部刷新 if(bkey[1].short_flag==1){/* LCD演示 */sprintf(text," KEY_1 down! ");LCD_DisplayStringLine(Line8,(uint8_t *)text);//局部刷新 __HAL_TIM_SET_AUTORELOAD(&htim2,250-1);__HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_2,125);bkey[1].short_flag=0;} if(bkey[2].short_flag==1){/* LCD演示 */sprintf(text," KEY_2 down! ");LCD_DisplayStringLine(Line8,(uint8_t *)text);//局部刷新 bkey[2].short_flag=0;} /*长按快速增加功能*/if(bkey[1].long_flag==1){/* LCD演示 */sprintf(text," KEY_1 long!,%d ",temp++);LCD_DisplayStringLine(Line8,(uint8_t *)text);//局部刷新 } if(bkey[1].double_flag==1){/* LCD演示 */sprintf(text," KEY_1 double! ");LCD_DisplayStringLine(Line8,(uint8_t *)text);//局部刷新 bkey[1].double_flag=0;} /*长按后抬起执行*/
// if(bkey[1].long_flag==1)
// {
// /* LCD演示 */
// sprintf(text," KEY_1 long! ");
// LCD_DisplayStringLine(Line8,(uint8_t *)text);//局部刷新
// bkey[1].long_flag=0;
// }
}void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{if(htim->Instance==TIM6)key_serv_double();
}
key
#include "key.h"#ifndef _KEY_H_
#define _KEY_H_#include "my_main.h"
struct Bkeys
{uint16_t age;uint8_t short_flag;uint8_t press;uint8_t long_flag;uint8_t double_ageEN;uint8_t double_age;uint8_t double_flag;
};
void key_serv(void);
void key_serv_long(void);
void key_serv_double(void);
#endifstruct Bkeys bkey[5]={0,0,0,0};uint8_t key_read()
{if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0)==0) return 1;else if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1)==0) return 2;else if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2)==0) return 3;else if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==0) return 4;else return 0;
}void key_serv()
{uint8_t key_sta=key_read();if(key_sta!=0){bkey[key_sta].age++;if(bkey[key_sta].age>1)bkey[key_sta].short_flag=1;}else{for(int i=0;i<5;i++) bkey[i].age=0;}
}
/*长按快速增加功能*/
void key_serv_long()
{uint8_t key_sta=key_read();if(key_sta!=0){bkey[key_sta].age++;if(bkey[key_sta].age>1) bkey[key_sta].press=1;}else{for(int i=0;i<5;i++) {if(bkey[i].press==1&&bkey[i].long_flag==0)bkey[i].short_flag=1;bkey[i].age=0;bkey[i].press=0;bkey[i].long_flag=0;}}if(bkey[key_sta].age>69) bkey[key_sta].long_flag=1;
}
/*长按后抬起执行*/
//void key_serv_long()
//{
// uint8_t key_sta=key_read();
// if(key_sta!=0)
// {
// bkey[key_sta].age++;
// if(bkey[key_sta].age>1) bkey[key_sta].press=1;
// }
// else
// {
// for(int i=0;i<5;i++)
// {
// if(bkey[i].age>69) bkey[i].long_flag=1;
// if(bkey[i].press==1&&bkey[i].long_flag==0)
// bkey[i].short_flag=1;
// bkey[i].age=0;
// bkey[i].press=0;
// }
// }
//}void key_serv_double()
{uint8_t key_sta=key_read();if(key_sta!=0){bkey[key_sta].age++;if(bkey[key_sta].age>1) bkey[key_sta].press=1;}else{for(int i=0;i<5;i++) {if(bkey[i].double_ageEN==1&&bkey[i].press==1){bkey[i].double_flag=1;bkey[i].double_ageEN=0;bkey[i].press=0;}if(bkey[i].press&&bkey[i].long_flag==0){bkey[i].double_ageEN=1;}if(bkey[i].double_ageEN==1)bkey[i].double_age++;if(bkey[i].double_ageEN==1&&bkey[i].double_age>20){bkey[i].short_flag=1;bkey[i].double_ageEN=0;bkey[i].double_age=0;}bkey[i].age=0;bkey[i].press=0;bkey[i].long_flag=0;}}if(bkey[key_sta].age>69) bkey[key_sta].long_flag=1;
}
相关文章:
定时器按键tim_key模版
低优先级放在高优先级内势必是程序卡死 把高优先级放到低优先级内,会使程序卡死 可修改 Debuger调试方法 Pwm rcc #include "my_main.h" uint8_t led_sta0x10; char text[30]; void LED_Disp(uint8_t dsLED) {HAL_GPIO_WritePin(GPIOC,GPIO_PIN_All,GPI…...

Kanass快速安装配置教程(入门级)
Kanass是一款国产开源免费的项目管理工具,工具简洁易用、开源免费,本文将介绍如何快速安装配置kanass,以快速上手。 1、快速安装 1.1 Linux 安装 点击官网 -> 演示与下载 ->下载,下载Linux安装包,…...

无用知识之:std::initializer_list的秘密
先说结论,用std::initializer_list初始化vector,内部逻辑是先生成了一个临时数组,进行了拷贝构造,然后用这个数组的起终指针初始化initializer_list。然后再用initializer_list对vector进行初始化,这个动作又触发了拷贝…...

论文阅读笔记 —— 英文论文常见缩写及含义
正文 缩写全称含义Reference发音w.r.twith reference to关于, 根据WRT - Wikiet al.拉丁语et alia的缩写等等Et Al. | Meaning & Use in APA, MLA & Chicago–etc拉丁语et cetera的缩写等等ETC - Cambridge DictionaryWhat’s ‘etc.’ an abbreviation of (and what …...
实验9 JSP访问数据库(二)
实验9 JSP访问数据库(二) 目的: 1、熟悉JDBC的数据库访问模式。 2、掌握预处理语句的使用 实验要求: 1、使用Tomcat作为Web服务器 2、通过JDBC访问数据库,实现增删改查功能的实现 3、要求提交实验报告,将代…...

[c语言日寄]C语言类型转换规则详解
【作者主页】siy2333 【专栏介绍】⌈c语言日寄⌋:这是一个专注于C语言刷题的专栏,精选题目,搭配详细题解、拓展算法。从基础语法到复杂算法,题目涉及的知识点全面覆盖,助力你系统提升。无论你是初学者,还是…...

Airflow:选择合适执行器扩展任务执行
Apache Airflow是面向开发人员使用的,以编程方式编写、调度和监控的数据流程平台。可伸缩性是其关键特性之一,Airflow支持使用不同的执行器来执行任务。在本文中,我们将深入探讨如何利用这些执行器在Airflow中有效地扩展任务执行。 理解Airfl…...

使用冒泡排序模拟实现qsort函数
1.冒泡排序 #define _CRT_SECURE_NO_WARNINGS 1 #include <stdio.h>int main() {int arr[] { 0,2,5,3,4,8,9,7,6,1 };int sz sizeof(arr) / sizeof(arr[0]);//冒泡排序一共排序 sz-1 趟for (int i 0; i < sz - 1; i){//标志位,如果有序,直接…...

AI大模型开发原理篇-4:神经概率语言模型NPLM
神经概率语言模型(NPLM)概述 神经概率语言模型(Neural Probabilistic Language Model, NPLM) 是一种基于神经网络的语言建模方法,它将传统的语言模型和神经网络结合在一起,能够更好地捕捉语言中的复杂规律…...

Eigen::Tensor使用帮助
0 引言 用python实现了某些算法之后,想转成C来获取更高的性能。但是python数组的操作太灵活了,尤其是3维、4维、5维等高维数组,以及它们的广播、数组坐标、切片等机制。还有numpy的pad、where等操作更是给C转换带来了更多的麻烦。 查阅了相…...

git基础使用--3---git安装和基本使用
文章目录 git基础使用--3--git-安装和基本使用1. git工具安装1.1 git1.2 TortoiseGit1.3 远程仓2. git本地仓库版本管理2.1 git常用命令2.2 git基本操作2.2.1 设置用户名和邮箱 2.2 git基本操作2.2.1 初始化本地仓 git init2.2.2 查看本地库状态 git status2.2.3 添加暂缓区2.2…...

html的字符实体和颜色表示
在HTML中,颜色可以通过以下几种方式表示,以下是具体的示例: 1. 十六进制颜色代码 十六进制颜色代码以#开头,后面跟随6个字符,每两个字符分别表示红色、绿色和蓝色的强度。例如: • #FF0000:纯红…...

OpenAI发布o3-mini:免费推理模型,DeepSeek引发的反思
引言 在人工智能领域,OpenAI再次引领潮流,推出了全新的推理模型系列——o3-mini。这一系列包括low、medium和high三个版本,旨在进一步推动低成本推理的发展。与此同时,OpenAI的CEO奥特曼也在Reddit的“有问必答”活动中罕见地公开…...

Zemax 中带有体素探测器的激光谐振腔
激光谐振腔是激光系统的基本组成部分,在光的放大和相干激光辐射的产生中起着至关重要的作用。 激光腔由两个放置在光学谐振器两端的镜子组成。一个镜子反射率高(后镜),而另一个镜子部分透明(输出耦合器)。…...

大模型训练(5):Zero Redundancy Optimizer(ZeRO零冗余优化器)
0 英文缩写 Large Language Model(LLM)大型语言模型Data Parallelism(DP)数据并行Distributed Data Parallelism(DDP)分布式数据并行Zero Redundancy Optimizer(ZeRO)零冗余优化器 …...

C# 实现 “Hello World” 教程
.NET学习资料 .NET学习资料 .NET学习资料 C# 作为一种广泛应用于.NET 开发的编程语言,以其简洁、高效和类型安全等特性,深受开发者喜爱。在踏入 C# 编程领域时,编写经典的 “Hello World” 程序是重要的起点,它能帮助我们快速熟…...

LabVIEW无线齿轮监测系统
本案例介绍了基于LabVIEW的无线齿轮监测系统设计。该系统利用LabVIEW编程语言和改进的天牛须算法优化支持向量机,实现了无线齿轮故障监测。通过LabVIEW软件和相关硬件,可以实现对齿轮箱振动信号的采集、传输和故障识别,集远程采集、数据库存储…...

IM 即时通讯系统-01-概览
前言 有时候希望有一个 IM 工具,比如日常聊天,或者接受报警信息。 其实主要是工作使用,如果是接收报警等场景,其实DD这种比较符合场景。 那么有没有必要再创造一个DD呢? 答案是如果处于个人的私有化使用࿰…...

【人工智能】 在本地运行 DeepSeek 模型:Ollama 安装指南
持续更新。。。。。。。。。。。。。。。 【人工智能】 在本地运行 DeepSeek 模型:Ollama 安装指南 安装 Ollama安装 DeepSeek 模型选择版本 ,版本越高,参数越多 性能越好使用 DeepSeek 模型 安装 Ollama 访问 Ollama 官网: 前往 https://oll…...

【Linux系统】信号:信号保存 / 信号处理、内核态 / 用户态、操作系统运行原理(中断)
理解Linux系统内进程信号的整个流程可分为: 信号产生 信号保存 信号处理 上篇文章重点讲解了 信号的产生,本文会讲解信号的保存和信号处理相关的概念和操作: 两种信号默认处理 1、信号处理之忽略 ::signal(2, SIG_IGN); // ignore: 忽略#…...

使用VSCode开发Django指南
使用VSCode开发Django指南 一、概述 Django 是一个高级 Python 框架,专为快速、安全和可扩展的 Web 开发而设计。Django 包含对 URL 路由、页面模板和数据处理的丰富支持。 本文将创建一个简单的 Django 应用,其中包含三个使用通用基本模板的页面。在此…...
)
论文解读:交大港大上海AI Lab开源论文 | 宇树机器人多姿态起立控制强化学习框架(二)
HoST框架核心实现方法详解 - 论文深度解读(第二部分) 《Learning Humanoid Standing-up Control across Diverse Postures》 系列文章: 论文深度解读 + 算法与代码分析(二) 作者机构: 上海AI Lab, 上海交通大学, 香港大学, 浙江大学, 香港中文大学 论文主题: 人形机器人…...

51c自动驾驶~合集58
我自己的原文哦~ https://blog.51cto.com/whaosoft/13967107 #CCA-Attention 全局池化局部保留,CCA-Attention为LLM长文本建模带来突破性进展 琶洲实验室、华南理工大学联合推出关键上下文感知注意力机制(CCA-Attention),…...
:OpenBCI_GUI:从环境搭建到数据可视化(下))
脑机新手指南(八):OpenBCI_GUI:从环境搭建到数据可视化(下)
一、数据处理与分析实战 (一)实时滤波与参数调整 基础滤波操作 60Hz 工频滤波:勾选界面右侧 “60Hz” 复选框,可有效抑制电网干扰(适用于北美地区,欧洲用户可调整为 50Hz)。 平滑处理&…...
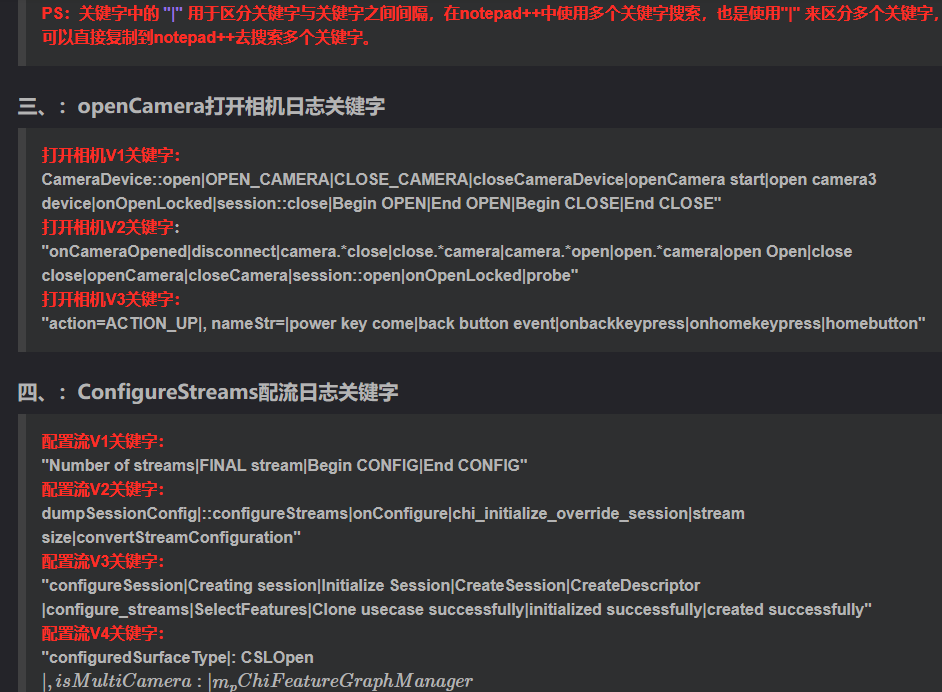
相机Camera日志实例分析之二:相机Camx【专业模式开启直方图拍照】单帧流程日志详解
【关注我,后续持续新增专题博文,谢谢!!!】 上一篇我们讲了: 这一篇我们开始讲: 目录 一、场景操作步骤 二、日志基础关键字分级如下 三、场景日志如下: 一、场景操作步骤 操作步…...

STM32+rt-thread判断是否联网
一、根据NETDEV_FLAG_INTERNET_UP位判断 static bool is_conncected(void) {struct netdev *dev RT_NULL;dev netdev_get_first_by_flags(NETDEV_FLAG_INTERNET_UP);if (dev RT_NULL){printf("wait netdev internet up...");return false;}else{printf("loc…...
《通信之道——从微积分到 5G》读书总结
第1章 绪 论 1.1 这是一本什么样的书 通信技术,说到底就是数学。 那些最基础、最本质的部分。 1.2 什么是通信 通信 发送方 接收方 承载信息的信号 解调出其中承载的信息 信息在发送方那里被加工成信号(调制) 把信息从信号中抽取出来&am…...
详解:相对定位 绝对定位 固定定位)
css的定位(position)详解:相对定位 绝对定位 固定定位
在 CSS 中,元素的定位通过 position 属性控制,共有 5 种定位模式:static(静态定位)、relative(相对定位)、absolute(绝对定位)、fixed(固定定位)和…...
)
相机Camera日志分析之三十一:高通Camx HAL十种流程基础分析关键字汇总(后续持续更新中)
【关注我,后续持续新增专题博文,谢谢!!!】 上一篇我们讲了:有对最普通的场景进行各个日志注释讲解,但相机场景太多,日志差异也巨大。后面将展示各种场景下的日志。 通过notepad++打开场景下的日志,通过下列分类关键字搜索,即可清晰的分析不同场景的相机运行流程差异…...

【生成模型】视频生成论文调研
工作清单 上游应用方向:控制、速度、时长、高动态、多主体驱动 类型工作基础模型WAN / WAN-VACE / HunyuanVideo控制条件轨迹控制ATI~镜头控制ReCamMaster~多主体驱动Phantom~音频驱动Let Them Talk: Audio-Driven Multi-Person Conversational Video Generation速…...