[EAI-023] FAST,机器人动作专用的Tokenizer,提高VLA模型的能力和训练效率
Paper Card
论文标题:FAST: Efficient Action Tokenization for Vision-Language-Action Models
论文作者:Karl Pertsch, Kyle Stachowicz, Brian Ichter, Danny Driess, Suraj Nair, Quan Vuong, Oier Mees, Chelsea Finn, Sergey Levine
论文链接:https://arxiv.org/abs/2501.09747
论文出处:/
论文被引:/
项目主页:https://www.pi.website/research/fast
Abstract
基于Transformer的视觉-语言-动作(VLA)策略等自回归序列模型,可以非常有效地捕捉复杂且可泛化的机器人行为。 但是,此类模型对连续动作信号的进行 tokenization(离散标记化),这决定了模型预测的离散token (标记)如何映射到连续的机器人动作(action)。 当前基于简单逐维度、逐时间步长分箱方案的机器人动作离散标记化方法,在从高频机器人数据中学习灵巧技能时,通常表现不佳。 为了解决这一挑战,本文提出了一种基于离散余弦变换的基于压缩的机器人动作离散标记化方案——Frequency-space Action Sequence Tokenization (FAST),能够为高度灵巧和高频的任务训练自回归VLA,而标准离散化方法在此类任务中完全失效。 基于FAST,发布了一个通用的机器人动作离散标记化器 FAST+,它在100万个真实的机器人动作轨迹上训练。 它可以用作各种机器人动作序列(具有不同的动作空间和控制频率)的黑盒分词器(tokenizer)。 当与 VLA 模型 pi0 结合使用时,可以扩展到在1万小时的机器人数据上进行训练,并与扩散VLA模型的性能相当,但训练时间减少了5倍。
Summary
研究背景
性能好的tokenizer对序列模型的性能至关重要。当前机器人策略通常使用基于每个维度、每个时间步长分箱方案的简单 tokenization 方法,这类方法在学习具有高频控制的灵巧技能时的表现不好(本文中涉及的测试全部失败)。当预测未来动作序列时,简单的tokenizer难以捕获各个时间步之间的相关性,高度相关的action token降低了自回归VLA模型对 next token prediction 建模的有效性。
方法介绍

从第一性原理出发,开发新的 action tokenizer。关键想法:受到llama中使用的 BPE 编码方法的启发,在模型训练之前压缩机器人动作信号,减少连续token之间的相关性。考虑到机器人动作是连续信号,因此采用离散余弦变换编码,由此产生的 tokenization 方法称为 Frequency-space Action Sequence Tokenization (FAST)。在 DROID 数据集上高效训练 VLA 模型,在未见的真实环境通过自然语言提示进行零样本评测。

构建了 FAST+ 通用的机器人动作 tokenizer,在100万条真机数据上训练。可以对各种机器人动作序列进行分词,报错单臂机器人、双臂机器人和移动机器人。当pi0模型结合FAST进行训练时,比原来的结合扩散思想的模型训练时间缩短了 5 倍,但性能相当。
相关工作
基于VLM构建的VLA模型是构建通用机器人策略的有效方法。他在大规模的互联网图文对上训练,并使用机器人数据微调,用于机器人控制。VLA的优势是:1)数十亿参数的VLM骨干为策略提供了适应大型机器人数据集所需要的表达能力;2)重用VLM的权重可以提高VLA模型遵从多样化指令的能力和泛化能力,例如泛化到未见物体和未见场景背景。
当前VLA模型的控制频率基本都很低,自回归的VLA模型更甚,难以适应高频的灵巧操作任务。原因是 tokenizer 使用简单的每个维度、每个时间步长分箱方案。为此,本文提出了一种基于时间序列压缩技术的机器人动作分词器 FAST。
前置知识
问题描述:目标是训练策略 π ( a 1 : H ∣ o ) π(a_{1:H}|o) π(a1:H∣o),将观测结果 o o o 映射到未来机器人动作序列 a 1 : H a_{1:H} a1:H。假设策略输出动作块(Action Chunk),即序列长度为 H H H 动作,这使得更容易产生时间上一致的动作并减少复合误差。 动作分词(Action Tokenization)的目标是定义一个映射 T a : a 1 : H → [ T 1 , … , T n ] \mathcal{T}_{a}:a_{1:H} → [T_1,…,T_n] Ta:a1:H→[T1,…,Tn],从维度为 ∣ A ∣ |\mathcal{A}| ∣A∣ 的连续动作 a 1 : H a_{1:H} a1:H 序列映射到来自大小为 ∣ V ∣ |\mathcal{V}| ∣V∣ 的词汇表中的 n n n 个离散token序列 T ∈ ∣ V ∣ T∈|\mathcal{V}| T∈∣V∣。动作序列之间的token数量 n 可能不同,就像相同长度的句子可能被离散化为可变数量的文本token一样。
基于分箱的动作token化:动作token化最常用的方法是简单的分箱离散化。 对于给定的动作 a,这种方法独立地离散化每个维度,将训练数据集中值的范围划分为 N N N 个均匀的箱,最常用的是 N = 256 N=256 N=256。对于D维的动作序列 a 1 : H a_{1:H} a1:H,此token化方案将应用于每个时间步,从而产生最终的token序列 T a ( a 1 : H ) = [ T 1 , 1 , … , T 1 , D , … , T H , 1 , … , T H , D ] \mathcal{T}a(a1:H)=[T_{1,1},…,T_{1,D},…,T_{H,1},…,T_{H,D}] Ta(a1:H)=[T1,1,…,T1,D,…,TH,1,…,TH,D]。对于高频机器人数据,这种token化方案并非最优:很容易为每个动作片段生成数百个 token,使得难以训练并且推理速度慢。
Tokenization 对 VLA 模型训练的影响

创建了一个简单的合成时间序列数据集,其目标是预测一个插值四个随机生成点的三次曲线,如图3所示。这个问题反映了高频动作片段上训练的策略面临的挑战,即策略必须预测一系列连续的动作。训练一个小型自回归Transformer进行实验,序列时间步H从25到800,以模拟不同频率收集的动作数据。Navie方法表示将动作序列中的每一个元素进行256bins分箱操作。
实验结果表明,分箱方案的模型在低采样频率的条件下预测效果较好,但是随着采样频率增加,预测误差急剧增加。为什么呢?因为自回归模型的训练目标是下一个token预测,因此,他们的学习信号在给定 T 1 : i − 1 T_{1:i-1} T1:i−1 的情况下与 T i T_i Ti 的边际信息内容成正比。分箱方案随着采样频率的增加,边际信息接近于零:对于平滑信号,随着时间步长的缩短,每个时间步长的变化成比例地缩小。这极大地减慢了训练收敛速度,并且难以你和复杂的高频数据集。例如,OpenVLA在低频的 BridgeV2 和 RT-1 数据集上运行良好,但是对于高频的 DROID 数据集表现不佳。这说明为机器人动作设计更好的分词器的重要性。
通过时间序列压缩实现高效的动作分词器

为了解决前述提到的高频动作轨迹中的 冗余会导致每个action token的边际信息量低进而导致训练性能差的问题,需要一种能够将高度冗余的动作信号压缩减少成少量高信息量token的动作离散化方法。
本文使用基于离散余弦变换(DCT)的压缩算法构建FAST。DCT是一种频域变换,它将连续信号表示为各种频率的余弦元素之和。低频捕获信号的整体形状,而高频份量反映尖锐的跳变(sharp jumps)。
图4说明了FAST从原始机器人动作到action token的变换步骤。首先对输入动作进行归一化,然后对每个动作维度应用DCT,为了压缩信号,忽略不重要的系数,得到量化后的稀疏的矩阵。然后将矩阵展平为一个一维整数向量,然后训练一个BPE分词器将其无损压缩成稠密的token。

通用机器人动作分词器
FAST 中唯一需要学习的组件是 BPE 编码器的词汇表,这个词汇表需要针对分词器应用的每个新数据集进行循例那,虽然只需要几分钟,但也增加了使用FAST的难度。因此,使用100万个1s的动作块训练了一个通用的机器人动作分词器。已经开源并合入到Transformers库了。

训练所需要的数据集:数据集有多种动作空间:联合空间、末端执行器世界坐标系和末端执行器相机坐标系,以确保所得分词器的通用性。Open X-Embodiment、DROID和Bridge V2则以其原始形式包含在内。 在分词之前,所有动作都填充到32维,以适应不同维度的动作空间。
消融实验
模型基线:pi0、OpenVLA
实验目标:验证FAST分词器+自回归VLA模型的有效性
评估任务

如图5所示,包含7个评估任务(6个真实机器人任务,1个模拟任务),旨在测试VLA在高度灵巧的任务(例如折叠衣物)和泛化任务(例如在未见环境中进行0样本桌面操作)上的性能。
- Libero:在Libero [43]模拟基准套件上进行测试。测量了Libero-Spatial、Libero-Object、Libero-Goal和Libero-10的平均性能。
- 餐桌清理 [7] (20 Hz):一台UR5单臂机器人需要清理桌子,将12个物体分类到垃圾桶(用于垃圾)和塑料容器(用于盘子、碗、杯子和餐具)中。此任务需要精确抓取各种物体。
- 折叠T恤 [7] (50 Hz):一套双臂ARX机器人需要在一个静止的桌面上折叠各种衬衫。在任务开始时,衬衫平放在桌子上。 成功完成此任务需要精确的抓取和移动才能折叠衬衫。
- 杂货装袋 [7] (20 Hz):一台UR5单臂机器人需要将 7 个物体从桌子上装入杂货袋中,注意不要弄倒或撕破袋子。 此任务需要拾取各种各样的物体并小心地将它们放入袋中。
- 从烤面包机中取出吐司 [7] (50 Hz):一台双臂Trossen Viper-X机器人需要从烤面包机中取出两片面包并将它们放在盘子上。 此任务需要精确地抓取和放置面包片。
- 衣物折叠 [7] (50 Hz):一台双臂ARX机器人需要从篮子里取出衬衫和短裤,将它们平放在桌子上,然后折叠并堆叠起来。 这是我们测试中最灵巧的任务。 它需要精确的抓取,动态的动作来使衣物平整,在衣物缠结时进行重试和纠正,以及将折叠好的衣物精确地放置在现有的衣物堆上。报告了单个服装物品的成功率。
- 零样本DROID桌面操作 [38] (15 Hz):测试了一个在完整DROID数据集上训练的策略,该策略涵盖各种桌面操作任务,例如拾取和放置物体、擦拭、打开和关闭抽屉等。在未见的环境中测试该策略,该环境具有新的桌子设置、背景、新颖的物体、视角和桌子高度。这是第一次在完全未见的环境中对DROID策略进行“零样本”评估,无需协同训练或微调,只需使用自然语言提示预训练模型即可。
机器人动作分词器对比

使用1秒的动作片段。FAST分词器对所有数据集都实现了有效的压缩,高频动作上效果更显著,token为20-53。

先前工作中应用的naive分词方法难以在高频机器人数据上学习有效的策略。最高频的任务中尤为明显:餐桌整理 (20Hz) 和 T 恤折叠 (50Hz)。

FAST 分词技术实现了在 DROID 数据集上成功训练强大的通用策略,该策略可以通过自然语言提示,在未见过的环境中进行零样本评估,无需微调。所有先前的工作都没有显示零样本结果,而是完全专注于联合训练或微调评估。在三个大学的校园中对各种桌面操作任务进行测试,证明了策略的通用性(图 7)。 无需额外训练,该策略能够熟练地执行简单的操作任务,例如在各种场景和摄像机视角下拾取和放置物体、打开和关闭橱柜以及打开水龙头。即使是不成功的尝试也表现出合理的行为,例如靠近微波炉和洗碗机门的把手,即使最终未能打开它们。
消融研究
回答两个问题:
- FAST分词方法是否独立于底层VLA主干?
- BPE压缩步骤有多重要?

为了回答第一个问题,在高频T恤折叠数据集上训练了一个OpenVLA策略,修改了OpenVLA模型代码以接受多个输入图像并预测1秒的动作块。结果表明,FAST能够显著提高OpenVLA的性能,使其能够有效地训练高频机器人操作数据。这表明,分词方法独立于底层模型主干,并且可以轻松应用于各种预训练的自回归Transformer模型。

在桌面整理和T恤折叠任务上消融了BPE编码步骤。结果表明,没有BPE编码的策略获得了更差的性能(但仍然优于朴素分词)。 直观地说,DCT变换仍然将大部分信号信息集中在少数几个token中,从而改善了学习信号。 然而,如果没有BPE,就会出现大量重复的值为0的token,这会稀释学习信号,并显著减慢推理速度,因为模型需要自回归地预测数百个动作token,最终导致策略性能下降。
自回归VLA与扩散VLA对比

图 9 所示,在小型数据集(Libero,折叠T恤;<50小时)上,两种VLA的性能相当。 但是在像搬运桌子这样的大型数据集上,基于FAST的VLA收敛速度明显更快,在训练步骤比π0的扩散变体少3倍的情况下达到了高性能。使用FAST分词训练的自回归 π0 模型更严格地遵循语言指令:在DROID评估中,扩散π0模型经常忽略语言指令,导致分数较低。 未来会继续研究扩散和自回归VLA的语言遵循能力。
自回归VLA的一个当前局限性在于其推理速度:π0使用扩散模型通常可以在NVIDIA 4090 GPU上在100毫秒内预测一秒钟的动作片段,但π0模型使用FAST分词需要大约750毫秒的每个片段推理时间,因为它必须执行更多自回归解码步骤(通常需要解码30-60个动作token,而扩散模型π0需要10个扩散步骤)并使用完整的20亿参数语言模型主干进行自回归解码(而扩散模型π0使用3亿参数的“动作专家”)。 未来会继续研究离散token自回归Transformer模型的推理提速。
实验结论
本文介绍了 FAST,一种用于高频机器人控制数据的动作分词器。FAST使用离散余弦变换(DCT)和字节对编码(BPE)来压缩动作块,使得其具有更好的压缩效果。实验表明,与以前使用的简单动作离散化方法相比,FAST带来了显著的性能提升,并且优于基于矢量量化的更复杂的学习分词方法。
未来工作:
动作分词器。FAST是朝着通用机器人动作分词器迈出的重要一步,但仍有很多问题有待解决。在这项工作对静态机器人机械臂测试了 FAST。FAST+在其他机器人形态(如移动机器人、灵巧手和人形机器人)上具有良好的压缩能力。在这些平台上测试实际策略性能是未来工作的一个令人兴奋的方向。探索替代压缩方案,以及测试基于压缩的动作编码与非自回归解码方法(如扩散[7])的组合,是未来研究的有趣方向。
VLA 架构。本文初步探索了两种主要类型的 VLA 架构(自回归和扩散解码 VLA)之间的权衡,但最佳 VLA 架构仍未确定。未来工作应仔细研究训练速度、语言基础能力和任一方法的表达能力之间的权衡。
推理速度。 虽然π0-FAST 的整体性能与扩散π0匹配,但在推理时间上较慢。未来的工作应该探索加快自回归 VLA 模型推理速度的方法,以使它们能够解决高度动态的任务。
相关文章:
[EAI-023] FAST,机器人动作专用的Tokenizer,提高VLA模型的能力和训练效率
Paper Card 论文标题:FAST: Efficient Action Tokenization for Vision-Language-Action Models 论文作者:Karl Pertsch, Kyle Stachowicz, Brian Ichter, Danny Driess, Suraj Nair, Quan Vuong, Oier Mees, Chelsea Finn, Sergey Levine 论文链接&…...

关于贪心学习的文笔记录
贪心,顾名思义就是越贪越好,越多越有易,他给我的感觉是,通常是求最大或最小问题,相比于动态规划贪心让人更加琢磨不透,不易看出方法,为此在这记录我所见过的题型和思维方法,以便回头…...

SLAM技术栈 ——《视觉SLAM十四讲》学习笔记(一)
《视觉SLAM十四讲》学习笔记(一) 第2讲 初识SLAM习题部分 第3讲 三维空间刚体运动3.1 左手系与右手系3.2 齐次坐标3.3 旋转矩阵与变换矩阵3.4 正交群与欧式群3.5 旋转向量与欧拉角3.6 实践Eigen线性代数库3.6.1 QR分解(QR decomposition) 3.7 四元数到其…...

【ChatGPT:开启人工智能新纪元】
一、ChatGPT 是什么 最近,ChatGPT 可是火得一塌糊涂,不管是在科技圈、媒体界,还是咱们普通人的日常聊天里,都能听到它的大名。好多人都在讨论,这 ChatGPT 到底是个啥 “神器”,能让大家这么着迷?今天咱就好好唠唠。 ChatGPT,全称是 Chat Generative Pre-trained Trans…...

1. 【.NET 8 实战--孢子记账--从单体到微服务--转向微服务】--前言
在我们的专栏《单体开发》中,我们实现了一个简单的记账软件的服务端,并且成功上线。随着用户数量的不断增长,问题逐渐开始显现。访问量逐渐增加,服务端的压力也随之加大。随着访问量的攀升,服务端的响应时间变得越来越…...

量子力学初步:微观领域的科学之旅
飞书📚链接:量子力学篇 长尾 - 什么是量子力学 (未完成… 等有时间再看,前面的内容可以参考下,比如了解自旋、以及斯特恩-盖拉赫实验) 【量子力学篇-01期】经典物理学的终结,量子力学的开端 量…...

趣味Python100例初学者练习01
1. 1 抓交通肇事犯 一辆卡车违反交通规则,撞人后逃跑。现场有三人目击该事件,但都没有记住车号,只记下了车号的一些特征。甲说:牌照的前两位数字是相同的;乙说:牌照的后两位数字是相同的,但与前…...

postgresql的用户、数据库和表
在 PostgreSQL 中,用户、数据库和表是关系型数据库系统的基本组成部分。理解这些概念对数据库管理和操作至关重要。下面是对这些概念的详细解释: 1. 用户(User) 在 PostgreSQL 中,用户(也称为 角色&#…...

对游戏宣发的粗浅思考
1.两极分化 认真观摩了mgs系列制作人的x账号, 其更新频率吓死人,一天能发几十条之多,吓死人。大部分都是转发相关账号的ds2或mgs相关内容, 每日刻意的供给这些内容来满足几十万粉丝需求,维护热情。 幕后是专业的公…...

【Java基础-42.3】Java 基本数据类型与字符串之间的转换:深入理解数据类型的转换方法
在 Java 开发中,基本数据类型与字符串之间的转换是非常常见的操作。无论是从用户输入中读取数据,还是将数据输出到日志或界面,都需要进行数据类型与字符串之间的转换。本文将深入探讨 Java 中基本数据类型与字符串之间的转换方法,…...

(9) 上:学习与验证 linux 里的 epoll 对象里的 EPOLLIN、 EPOLLHUP 与 EPOLLRDHUP 的不同
(1)经过之前的学习。俺认为结论是这样的,因为三次握手到四次挥手,到 RST 报文,都是 tcp 连接上收到了报文,这都属于读事件。所以: EPOLLIN : 包含了读事件, FIN 报文的正常四次挥手、…...

webpack传输性能优化
手动分包 基本原理 手动分包的总体思路是:先打包公共模块,然后再打包业务代码。 打包公共模块 公共模块会被打包成为动态链接库(dll Dynamic Link Library),并生成资源清单。 打包业务代码 打包时,如果…...

智能小区物业管理系统打造高效智能社区服务新生态
内容概要 随着城市化进程的不断加快,智能小区物业管理系统的出现,正逐步改变传统物业管理的模式,为社区带来了崭新的管理理念和服务方式。该系统不仅提升了物业管理效率,还加强了业主与物业之间的互动,为每位居民提供…...

(done) MIT6.S081 2023 学习笔记 (Day7: LAB6 Multithreading)
网页:https://pdos.csail.mit.edu/6.S081/2023/labs/thread.html (任务1教会了你如何用 C 语言调用汇编,编译后链接即可) 任务1:Uthread: switching between threads (完成) 在这个练习中,你将设计一个用户级线程系统中的上下文切…...

面试经典150题——栈
文章目录 1、有效的括号1.1 题目链接1.2 题目描述1.3 解题代码1.4 解题思路 2、2.1 题目链接2.2 题目描述2.3 解题代码2.4 解题思路 3、最小栈3.1 题目链接3.2 题目描述3.3 解题代码3.4 解题思路 4、逆波兰表达式求值4.1 题目链接4.2 题目描述4.3 解题代码4.4 解题思路 5、基本…...

openmv的端口被拆分为两个 导致电脑无法访问openmv文件系统解决办法 openmv USB功能改动 openmv驱动被更改如何修复
我之前误打误撞遇到一次,直接把openmv的全部端口删除卸载然后重新插上就会自动重新装上一个openmv端口修复成功,大家可以先试试不行再用下面的方法 全部卸载再重新插拔openmv 要解决OpenMV IDE中出现的两个端口问题,可以尝试以下步骤&#x…...

自制虚拟机(C/C++)(三、做成标准GUI Windows软件,扩展指令集,直接支持img软盘)
开源地址:VMwork 要使终端不弹出, #pragma comment(linker, "/subsystem:windows /ENTRY:mainCRTStartup") 还要实现jmp near 0x01类似的 本次的main.cpp #include <graphics.h> #include <conio.h> #include <windows.h> #includ…...

算法题(56):旋转链表
审题: 我们需要根据k的大小把链表向右移动对应次数,并返回移动后的链表的头结点指针 思路: 根据提示中的数据大小我们发现:k的值可以远大于节点数。 也就是说我们对链表的操作存在周期,如果k%len0,说明我们…...

解决PyG安装中torch-sparse安装失败问题:详细指南
1 问题描述 最近在学习GNN,需要使用PyTorch Geometric(PyG)库。在安装PyG的过程中,遇到了torch-sparse安装失败的问题,错误提示为: ERROR: Failed building wheel for torch-sparse本文将详细记录问题的解…...

如何创建折叠式Title
文章目录 1 概念介绍2 使用方法3 示例代码 我们在上一章回中介绍了SliverGrid组件相关的内容,本章回中将介绍SliverAppBar组件.闲话休提,让我们一起Talk Flutter吧。 1 概念介绍 我们在本章回中介绍的SliverAppBar和普通的AppBar类似,它们的…...

FastAPI 教程:从入门到实践
FastAPI 是一个现代、快速(高性能)的 Web 框架,用于构建 API,支持 Python 3.6。它基于标准 Python 类型提示,易于学习且功能强大。以下是一个完整的 FastAPI 入门教程,涵盖从环境搭建到创建并运行一个简单的…...

Java多线程实现之Callable接口深度解析
Java多线程实现之Callable接口深度解析 一、Callable接口概述1.1 接口定义1.2 与Runnable接口的对比1.3 Future接口与FutureTask类 二、Callable接口的基本使用方法2.1 传统方式实现Callable接口2.2 使用Lambda表达式简化Callable实现2.3 使用FutureTask类执行Callable任务 三、…...

【git】把本地更改提交远程新分支feature_g
创建并切换新分支 git checkout -b feature_g 添加并提交更改 git add . git commit -m “实现图片上传功能” 推送到远程 git push -u origin feature_g...
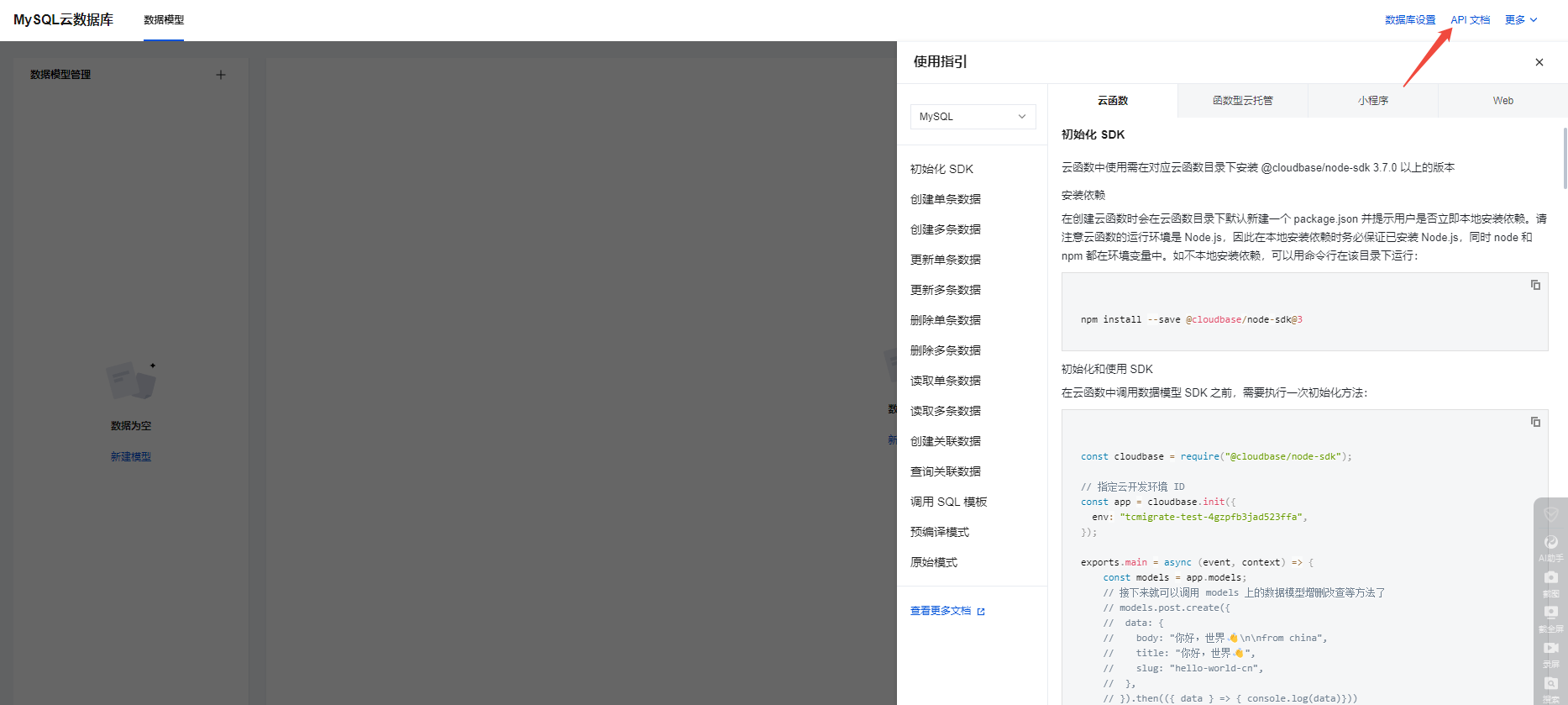
微信小程序云开发平台MySQL的连接方式
注:微信小程序云开发平台指的是腾讯云开发 先给结论:微信小程序云开发平台的MySQL,无法通过获取数据库连接信息的方式进行连接,连接只能通过云开发的SDK连接,具体要参考官方文档: 为什么? 因为…...

数据库分批入库
今天在工作中,遇到一个问题,就是分批查询的时候,由于批次过大导致出现了一些问题,一下是问题描述和解决方案: 示例: // 假设已有数据列表 dataList 和 PreparedStatement pstmt int batchSize 1000; // …...

成都鼎讯硬核科技!雷达目标与干扰模拟器,以卓越性能制胜电磁频谱战
在现代战争中,电磁频谱已成为继陆、海、空、天之后的 “第五维战场”,雷达作为电磁频谱领域的关键装备,其干扰与抗干扰能力的较量,直接影响着战争的胜负走向。由成都鼎讯科技匠心打造的雷达目标与干扰模拟器,凭借数字射…...

代理篇12|深入理解 Vite中的Proxy接口代理配置
在前端开发中,常常会遇到 跨域请求接口 的情况。为了解决这个问题,Vite 和 Webpack 都提供了 proxy 代理功能,用于将本地开发请求转发到后端服务器。 什么是代理(proxy)? 代理是在开发过程中,前端项目通过开发服务器,将指定的请求“转发”到真实的后端服务器,从而绕…...
)
Android第十三次面试总结(四大 组件基础)
Activity生命周期和四大启动模式详解 一、Activity 生命周期 Activity 的生命周期由一系列回调方法组成,用于管理其创建、可见性、焦点和销毁过程。以下是核心方法及其调用时机: onCreate() 调用时机:Activity 首次创建时调用。…...
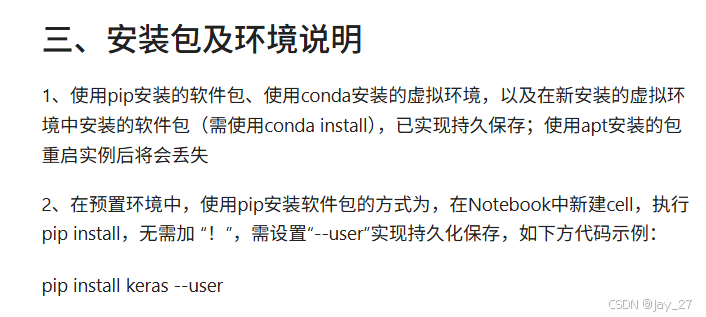
九天毕昇深度学习平台 | 如何安装库?
pip install 库名 -i https://pypi.tuna.tsinghua.edu.cn/simple --user 举个例子: 报错 ModuleNotFoundError: No module named torch 那么我需要安装 torch pip install torch -i https://pypi.tuna.tsinghua.edu.cn/simple --user pip install 库名&#x…...

C语言中提供的第三方库之哈希表实现
一. 简介 前面一篇文章简单学习了C语言中第三方库(uthash库)提供对哈希表的操作,文章如下: C语言中提供的第三方库uthash常用接口-CSDN博客 本文简单学习一下第三方库 uthash库对哈希表的操作。 二. uthash库哈希表操作示例 u…...