DeepSeek-R1:开源机器人智能控制系统的革命性突破
目录
引言
一、DeepSeek-R1 的概述
1.1 什么是 DeepSeek-R1?
1.2 DeepSeek-R1 的定位
二、DeepSeek-R1 的核心特性
2.1 实时控制能力
2.2 多传感器融合
2.3 路径规划与导航
2.4 人工智能集成
2.5 开源与模块化设计
2.6 跨平台支持
三、DeepSeek-R1 的技术架构
3.1 系统架构
3.2 核心算法
3.3 通信与接口
四、DeepSeek-R1 的应用场景
4.1 工业机器人
4.2 服务机器人
4.3 自动驾驶
4.4 医疗机器人
4.5 教育与科研
五、DeepSeek-R1 的开源生态
5.1 开源社区
5.2 开发者工具
5.3 合作与贡献
六、DeepSeek-R1 的未来展望
6.1 技术突破
6.2 应用扩展
6.3 社会影响
七、结语
引言
在机器人技术领域,智能控制系统是实现机器人自主化、智能化的核心。DeepSeek-R1 是由深度求索(DeepSeek)公司开发的一款开源机器人智能控制系统,旨在为机器人开发者提供高效、灵活且可扩展的解决方案。DeepSeek-R1 不仅具备强大的实时控制能力,还集成了先进的人工智能算法,能够支持多种机器人应用场景。本文将深入探讨 DeepSeek-R1 的核心特性、技术架构、应用场景以及其对机器人技术未来发展的影响。
一、DeepSeek-R1 的概述
1.1 什么是 DeepSeek-R1?
DeepSeek-R1 是一款开源的机器人智能控制系统,专为机器人开发者设计。它结合了实时控制、传感器融合、路径规划和人工智能算法,能够为机器人提供从底层控制到高层决策的全栈解决方案。DeepSeek-R1 的目标是通过开源的方式,降低机器人开发的门槛,推动机器人技术的普及和创新。
1.2 DeepSeek-R1 的定位
DeepSeek-R1 的定位是一个通用的机器人智能控制平台,适用于工业机器人、服务机器人、自动驾驶车辆等多种场景。其开源特性使得开发者可以根据自己的需求对系统进行定制和优化,从而加速机器人应用的开发进程。
二、DeepSeek-R1 的核心特性
2.1 实时控制能力
DeepSeek-R1 具备强大的实时控制能力,能够以毫秒级的响应时间控制机器人的运动。其控制算法经过高度优化,能够在复杂的动态环境中实现精确的运动控制。
2.2 多传感器融合
DeepSeek-R1 支持多种传感器的数据融合,包括激光雷达、摄像头、IMU(惯性测量单元)等。通过多传感器融合,系统能够更准确地感知环境,从而提高机器人的自主导航和避障能力。
2.3 路径规划与导航
DeepSeek-R1 集成了先进的路径规划算法,能够在复杂环境中生成最优路径。其导航模块支持动态障碍物检测和实时路径调整,确保机器人能够安全、高效地完成任务。
2.4 人工智能集成
DeepSeek-R1 内置了多种人工智能算法,包括深度学习、强化学习和计算机视觉。这些算法可以用于目标识别、语音交互、行为决策等高级功能,从而提升机器人的智能化水平。
2.5 开源与模块化设计
DeepSeek-R1 完全开源,代码和文档均可在 GitHub 上获取。其模块化设计使得开发者可以根据需要选择不同的功能模块,从而快速构建定制化的机器人系统。
2.6 跨平台支持
DeepSeek-R1 支持多种硬件平台和操作系统,包括 Linux、ROS(机器人操作系统)和嵌入式系统。这种跨平台特性使得它能够灵活应用于不同类型的机器人。
三、DeepSeek-R1 的技术架构
3.1 系统架构
DeepSeek-R1 的系统架构分为以下几个层次:
-
硬件层:支持多种传感器和执行器,包括电机、舵机、激光雷达等。
-
控制层:实现实时运动控制和传感器数据采集。
-
感知层:负责多传感器数据融合和环境感知。
-
决策层:集成路径规划、导航和人工智能算法,用于高层决策。
-
应用层:提供用户接口和开发工具,方便开发者构建应用。
3.2 核心算法
DeepSeek-R1 的核心算法包括:
-
运动控制算法:基于 PID 控制和模型预测控制(MPC),实现精确的运动控制。
-
路径规划算法:采用 A* 算法、Dijkstra 算法和 RRT(快速随机树)算法,支持静态和动态环境。
-
人工智能算法:包括卷积神经网络(CNN)用于图像识别,强化学习用于行为决策。
3.3 通信与接口
DeepSeek-R1 支持多种通信协议,包括 CAN 总线、Ethernet 和 Wi-Fi。其 API 接口设计简洁,方便开发者进行二次开发。
四、DeepSeek-R1 的应用场景
4.1 工业机器人
在工业领域,DeepSeek-R1 可以用于控制机械臂、AGV(自动导引车)等设备。其高精度的运动控制和路径规划能力能够显著提高生产效率。
4.2 服务机器人
DeepSeek-R1 适用于家庭服务机器人、酒店服务机器人等场景。其人工智能集成和多传感器融合能力使得机器人能够与人类进行自然交互,并提供个性化服务。
4.3 自动驾驶
DeepSeek-R1 可以用于开发自动驾驶车辆的控制系统。其实时控制能力和路径规划算法能够确保车辆在复杂交通环境中的安全行驶。
4.4 医疗机器人
在医疗领域,DeepSeek-R1 可以用于控制手术机器人和康复机器人。其高精度的运动控制和人工智能算法能够提高手术的准确性和康复效果。
4.5 教育与科研
DeepSeek-R1 的开源特性使其成为教育和科研的理想工具。学生和研究者可以使用它进行机器人技术的实验和研究,从而推动技术的创新。
五、DeepSeek-R1 的开源生态
5.1 开源社区
DeepSeek-R1 的开源社区非常活跃,吸引了全球开发者和研究者的参与。社区成员通过 GitHub 提交代码、报告问题和分享经验,共同推动系统的改进。
5.2 开发者工具
DeepSeek-R1 提供了丰富的开发者工具,包括:
-
仿真环境:基于 Gazebo 和 ROS 的仿真环境,方便开发者进行测试和验证。
-
API 接口:简洁的 API 接口,方便开发者进行二次开发。
-
教程与文档:详细的教程和文档帮助开发者快速上手。
5.3 合作与贡献
DeepSeek-R1 鼓励企业和研究机构参与合作。通过贡献代码、数据集或资金,合作伙伴可以共同推动技术的发展,并从中获得商业价值。
六、DeepSeek-R1 的未来展望
6.1 技术突破
未来,DeepSeek-R1 将继续在以下几个方面进行技术突破:
-
更高效的算法:优化运动控制、路径规划和人工智能算法,提高系统的性能和效率。
-
更强的感知能力:集成更多类型的传感器,提升机器人的环境感知能力。
-
更低的硬件要求:通过算法优化,降低系统对硬件资源的需求,从而降低成本。
6.2 应用扩展
随着技术的不断进步,DeepSeek-R1 将在更多领域得到应用,例如:
-
农业机器人:用于自动化种植、收割和监测。
-
物流机器人:用于仓库管理和货物配送。
-
太空探索:用于控制探测车和卫星。
6.3 社会影响
DeepSeek-R1 的开源特性将加速机器人技术的普及,使得更多中小企业和个人开发者能够使用先进的技术。同时,其灵活性和可扩展性将推动机器人应用的创新,为社会带来更多便利和价值。
七、结语
DeepSeek-R1 作为一款开源的机器人智能控制系统,凭借其强大的实时控制能力、多传感器融合能力和人工智能集成,正在成为机器人技术领域的重要力量。它不仅为开发者提供了高效、灵活的工具,还通过开源的方式推动了技术的民主化。未来,随着技术的不断进步和应用的不断扩展,DeepSeek-R1 有望在更多领域发挥重要作用,为人类社会带来深远的影响。
无论是研究者、开发者还是企业,都可以从 DeepSeek-R1 中受益。通过参与其开源生态,我们不仅可以推动技术的发展,还可以共同塑造机器人技术的未来。
相关文章:

DeepSeek-R1:开源机器人智能控制系统的革命性突破
目录 引言 一、DeepSeek-R1 的概述 1.1 什么是 DeepSeek-R1? 1.2 DeepSeek-R1 的定位 二、DeepSeek-R1 的核心特性 2.1 实时控制能力 2.2 多传感器融合 2.3 路径规划与导航 2.4 人工智能集成 2.5 开源与模块化设计 2.6 跨平台支持 三、DeepSeek-R1 的技术…...

第二十二章 MySQL锁之全局锁
目录 一、锁概述 二、全局锁概念 三、全局锁使用 四、全局锁特点 五、不加锁一致性数据备份 5.1. 实现方式 5.2. 优点和缺点 一、锁概述 锁是计算机协调多个进程或线程并发访问某一资源的机制。在数据库中,除传统的计算资源(CPU、RAM、I/O&#x…...

pytorch实现简单的情感分析算法
人工智能例子汇总:AI常见的算法和例子-CSDN博客 在PyTorch中实现中文情感分析算法通常涉及以下几个步骤:数据预处理、模型定义、训练和评估。下面是一个简单的实现示例,使用LSTM模型进行中文情感分析。 1. 数据预处理 首先,我…...

Win11关闭登录密码?
或者使用winR快捷键, 输入: netplwiz 进入页面后,按照提示按ctrlaltdel键更改密码。 在跳转页面点击更改密码。 输入原密码后,将新密码设置为空即可。 Win11的两个实用技巧系列之如何关闭登录密码?_win11关闭密码还是要输入-CSDN博客...

e2studio开发RA4M2(6)----GPIO外部中断(IRQ)配置
e2studio开发RA4M2.6--GPIO外部中断(IRQ)配置 概述视频教学样品申请硬件准备参考程序源码下载新建工程工程模板保存工程路径芯片配置工程模板选择时钟设置SWD调试口设置GPIO口配置按键中断配置中断回调函数主程序 概述 GPIO(通用输入/输出&a…...

DeepSeek 阐述 2025年前端发展趋势
预测2025年前端的发展趋势。首先,我需要考虑当前的前端 技术发展情况,以及近几年的变化趋势。比如,框架方面,React、Vue、Angular这些主流框架的更新方向和社区活跃度。可能用户想知道未来哪些技术会更流行,或者需要学…...

linux内核源代码中__init的作用?
在 Linux 内核源代码中,__init是一个特殊的宏,用于标记在内核初始化阶段使用的变量或函数。这个宏的作用是告诉内核编译器和链接器,被标记的变量或函数只在内核的初始化阶段使用,在系统启动完成后就不再需要了。因此,这…...

计算机从何而来?计算技术将向何处发展?
计算机的前生:机械计算工具的演进 算盘是计算机的起点,它其实是一台“机械式半自动化运算器”。打算盘的“口诀”其实就是它的编程语言,算盘珠就是它的存储器。 第二阶段是可以做四则运算的加法器、乘法器。1642年,法国数学家帕斯…...

浏览器的通信能力
浏览器的通信能力 用户代理 浏览器可以代替用户完成http请求,代替用户解析响应结果,所以我们称之为: 用户代理 user agent 在网络层面,对于前端开发者,必须要知道浏览器拥有的两大核心能力: 自动发出请…...

11. 9 构建生产级聊天对话记忆系统:从架构设计到性能优化的全链路指南
构建生产级聊天对话记忆系统:从架构设计到性能优化的全链路指南 关键词: 聊天对话记忆系统、多用户会话管理、LangChain生产部署、Redis记忆存储、高并发对话系统 一、服务级聊天记忆系统核心需求 多用户隔离:支持同时处理数千个独立对话持久化存储:对话历史不因服务重启丢…...

25.02.04 《CLR via C#》 笔记14
第二十一章 托管堆和垃圾回收 内存分配过程 CLR维护一个“下一次分配指针”(NextObjPtr),指向当前托管堆中第一个可用的内存地址 计算类型所需的字节数,加上对象开销(类型对象指针、同步块索引)所需字节数…...

半导体器件与物理篇5 mosfet及相关器件
认识mos二极管 MOS二极管是研究半导体表面特性最有用的器件之一。MOS二极管可作为存储电容器,并且是电荷耦合器件(CCD)的基本结构单元。 MOS二极管结构的重要参数包括:氧化层厚度d;施加于金属平板上的电压V(正偏压时V为正&#x…...

Hugging Face GGUF 模型可视化
Hugging Face GGUF 模型可视化 1. Finding GGUF files (检索 GGUF 模型)2. Viewer for metadata & tensors info (可视化 GGUF 模型)References 无知小儿,仙家雄霸天下,依附强者才是唯一的出路。否则天地虽大,也让你们无路可走࿰…...

PVE纵览-掌握 PVE USB 直通:让虚拟机与物理设备无缝连接
PVE纵览-掌握 PVE USB 直通:让虚拟机与物理设备无缝连接 文章目录 PVE纵览-掌握 PVE USB 直通:让虚拟机与物理设备无缝连接摘要前提条件步骤一:识别 USB 设备步骤二:编辑虚拟机配置步骤三:重启虚拟机注意事项其他配置选…...

关于系统重构实践的一些思考与总结
文章目录 一、前言二、系统重构的范式1.明确目标和背景2.兼容屏蔽对上层的影响3.设计灰度迁移方案3.1 灰度策略3.2 灰度过程设计3.2.1 case1 业务逻辑变更3.2.2 case2 底层数据变更(数据平滑迁移)3.2.3 case3 在途新旧流程兼容3.2.4 case4 接口变更3.2.5…...

DeepSeek:智能时代的AI利器及其应用前景
1.DeepSeek是什么? DeepSeek是一款基于人工智能技术的工具,旨在帮助用户高效处理和分析数据、生成内容、优化工作流程等。无论是数据分析、自然语言处理,还是自动化任务,DeepSeek都能提供强大的支持。其核心技术涵盖了机器学习、深…...
第一人称射击(FPS)游戏制作教程)
超详细UE4(虚幻4)第一人称射击(FPS)游戏制作教程
超详细UE4(虚幻4)第一人称射击(FPS)游戏制作教程 引言 在游戏开发领域,第一人称射击(FPS)游戏一直是最受欢迎的类型之一。从经典的《反恐精英》(CS)到现代的《使命召唤》(Call of Duty),FPS游戏凭借其紧张刺激的游戏体验和高度沉浸感,吸引了无数玩家。如果你是一…...

电商项目高级篇09-检索服务
电商项目高级篇09-检索服务 1、环境搭建1.1、前端静态文件准备1.2、search服务引入模版引擎1.3、index.html页面复制到templates文件夹下1.4、模仿product项目,引入名称空间1.5、动静分离,静态资源路径位置替换1.6、将1.1的静态资源放到nginx目录下1.7、…...

【网络协议大花园】应用层 http协议的使用小技巧,用好了都不用加班,效率翻两倍(下篇)
本篇会加入个人的所谓鱼式疯言 ❤️❤️❤️鱼式疯言:❤️❤️❤️此疯言非彼疯言 而是理解过并总结出来通俗易懂的大白话, 小编会尽可能的在每个概念后插入鱼式疯言,帮助大家理解的. 🤭🤭🤭可能说的不是那么严谨.但小编初心是能让更多人…...

5 前端系统开发:Vue2、Vue3框架(中):Vue前端工程化组件式开发
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言五、前端工程化(使用Vue创建一个完整的企业级前端项目)1 Vue脚手架(Vue-cli)环境准备(1)…...
:手搓截屏和帧率控制)
Python|GIF 解析与构建(5):手搓截屏和帧率控制
目录 Python|GIF 解析与构建(5):手搓截屏和帧率控制 一、引言 二、技术实现:手搓截屏模块 2.1 核心原理 2.2 代码解析:ScreenshotData类 2.2.1 截图函数:capture_screen 三、技术实现&…...

【网络】每天掌握一个Linux命令 - iftop
在Linux系统中,iftop是网络管理的得力助手,能实时监控网络流量、连接情况等,帮助排查网络异常。接下来从多方面详细介绍它。 目录 【网络】每天掌握一个Linux命令 - iftop工具概述安装方式核心功能基础用法进阶操作实战案例面试题场景生产场景…...
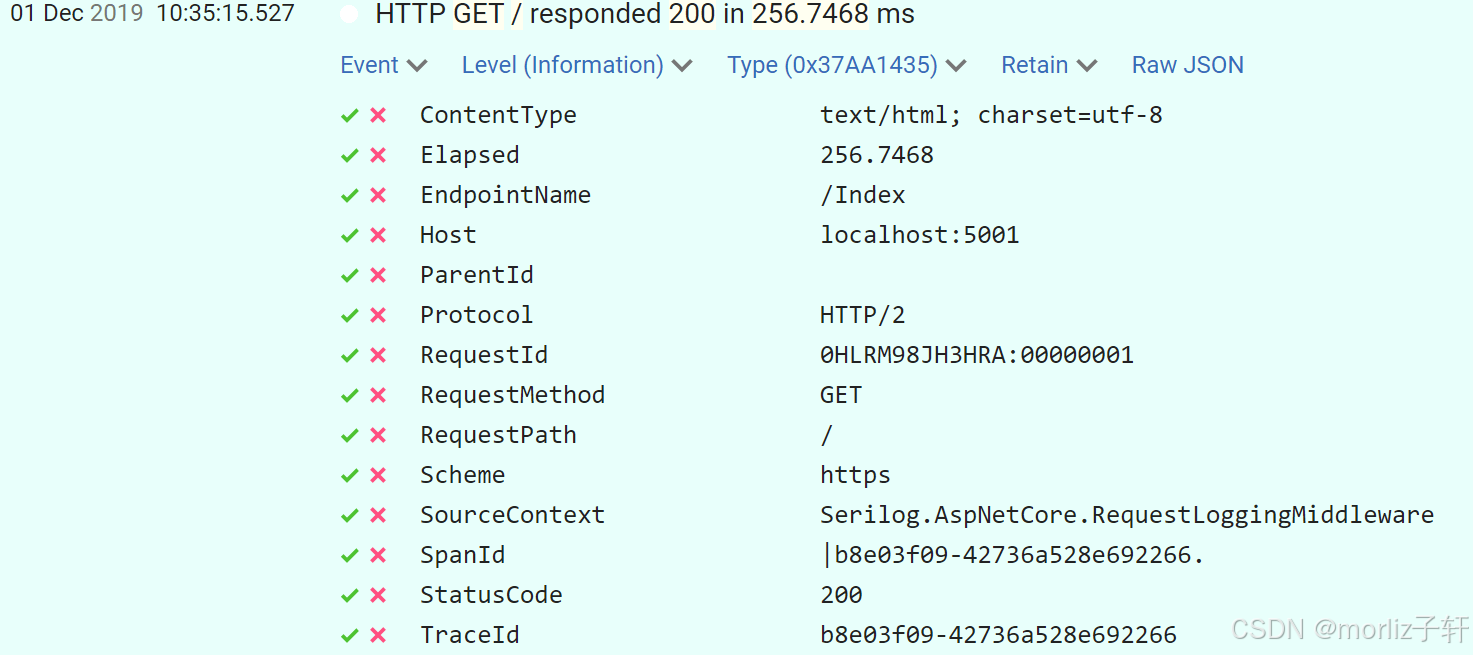
深入浅出Asp.Net Core MVC应用开发系列-AspNetCore中的日志记录
ASP.NET Core 是一个跨平台的开源框架,用于在 Windows、macOS 或 Linux 上生成基于云的新式 Web 应用。 ASP.NET Core 中的日志记录 .NET 通过 ILogger API 支持高性能结构化日志记录,以帮助监视应用程序行为和诊断问题。 可以通过配置不同的记录提供程…...

鸿蒙中用HarmonyOS SDK应用服务 HarmonyOS5开发一个医院挂号小程序
一、开发准备 环境搭建: 安装DevEco Studio 3.0或更高版本配置HarmonyOS SDK申请开发者账号 项目创建: File > New > Create Project > Application (选择"Empty Ability") 二、核心功能实现 1. 医院科室展示 /…...

04-初识css
一、css样式引入 1.1.内部样式 <div style"width: 100px;"></div>1.2.外部样式 1.2.1.外部样式1 <style>.aa {width: 100px;} </style> <div class"aa"></div>1.2.2.外部样式2 <!-- rel内表面引入的是style样…...

wpf在image控件上快速显示内存图像
wpf在image控件上快速显示内存图像https://www.cnblogs.com/haodafeng/p/10431387.html 如果你在寻找能够快速在image控件刷新大图像(比如分辨率3000*3000的图像)的办法,尤其是想把内存中的裸数据(只有图像的数据,不包…...
永磁同步电机无速度算法--基于卡尔曼滤波器的滑模观测器
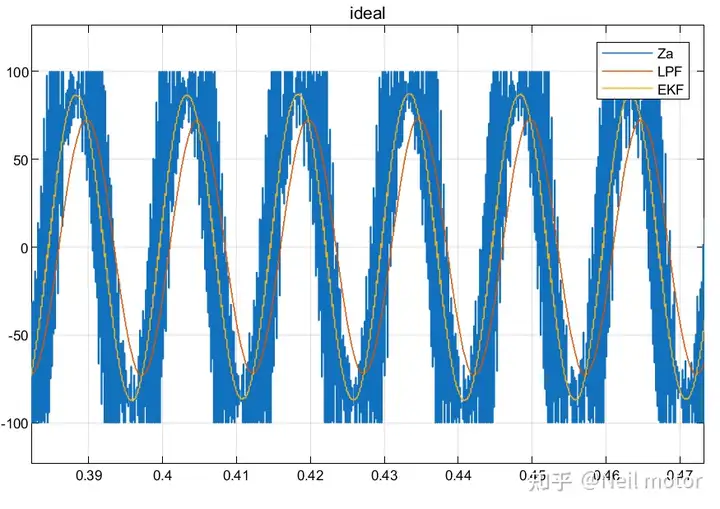
一、原理介绍 传统滑模观测器采用如下结构: 传统SMO中LPF会带来相位延迟和幅值衰减,并且需要额外的相位补偿。 采用扩展卡尔曼滤波器代替常用低通滤波器(LPF),可以去除高次谐波,并且不用相位补偿就可以获得一个误差较小的转子位…...

comfyui 工作流中 图生视频 如何增加视频的长度到5秒
comfyUI 工作流怎么可以生成更长的视频。除了硬件显存要求之外还有别的方法吗? 在ComfyUI中实现图生视频并延长到5秒,需要结合多个扩展和技巧。以下是完整解决方案: 核心工作流配置(24fps下5秒120帧) #mermaid-svg-yP…...

CppCon 2015 学习:Reactive Stream Processing in Industrial IoT using DDS and Rx
“Reactive Stream Processing in Industrial IoT using DDS and Rx” 是指在工业物联网(IIoT)场景中,结合 DDS(Data Distribution Service) 和 Rx(Reactive Extensions) 技术,实现 …...
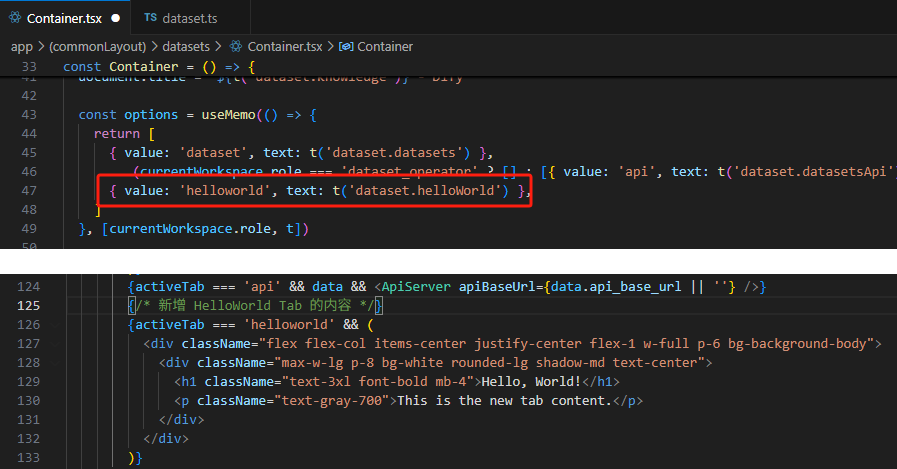
【技巧】dify前端源代码修改第一弹-增加tab页
回到目录 【技巧】dify前端源代码修改第一弹-增加tab页 尝试修改dify的前端源代码,在知识库增加一个tab页"HELLO WORLD",完成后的效果如下 [gif01] 1. 前端代码进入调试模式 参考 【部署】win10的wsl环境下启动dify的web前端服务 启动调试…...