GB/T 44721-2024 与 L3 自动驾驶:自动驾驶新时代的基石与指引
1.前言
在智能网联汽车飞速发展的当下,自动驾驶技术成为了行业变革的核心驱动力。从最初的辅助驾驶功能,到如今不断迈向高度自动化的征程,每一步都凝聚着技术的创新与突破。而在这一进程中,标准的制定与完善对于自动驾驶技术的规范化、安全化发展起着至关重要的作用。GB/T 44721-2024《智能网联汽车 自动驾驶系统通用技术要求》的发布,犹如一盏明灯,为自动驾驶尤其是 L3 级自动驾驶的发展照亮了前行的道路。本文将深入探讨 GB/T 44721-2024 与 L3 自动驾驶的紧密联系,并以华为问界汽车为例,阐述该标准对汽车智驾系统的重要指导意义,着重分析 ADS 介入、最小风险策略和驾驶员接管等关键环节。同时,也会引入 2024 年底北京市颁布的自动驾驶条例相关内容,进一步展现政策法规对自动驾驶行业的推动作用。

2. GB/T 44721-2024 标准解析
GB/T 44721-2024 是我国在 2024 年 9 月 29 日发布并实施的首个针对自动驾驶系统的国家标准,由工业和信息化部装备工业发展中心、公安部道路交通安全研究中心等单位起草。该标准从多个维度对自动驾驶系统进行规范,为行业发展提供了坚实的技术和安全保障。
2.1 功能安全要求
故障诊断与容错机制:自动驾驶系统需具备实时监测自身硬件与软件运行状态的能力,能及时发现诸如传感器故障、计算单元异常等问题。当检测到故障时,容错机制启动,例如通过冗余传感器或备份计算模块维持系统基本功能。以激光雷达为例,若主雷达出现故障,冗余雷达可迅速接替工作,确保环境感知的连续性。
安全冗余设计:在关键系统组件上采用多重备份,如电源系统、通信链路等。多套电源供应可在主电源故障时无缝切换,保障系统持续运行。通信链路的冗余则防止数据传输中断,确保车辆各部分之间信息交互稳定。
最小风险策略:当系统遭遇严重故障或无法处理的复杂情况时,执行最小风险策略。这通常包括自动减速至安全速度,缓慢驶向路边安全区域停车,并开启危险警示灯。系统还会通过车联网向周边车辆和交通管理中心发送警示信息,避免后续事故发生。在高速行驶中遇到突发系统故障,车辆会在保障安全的前提下,逐渐减速至应急车道停车。
2.2 环境感知与决策要求
传感器精度与融合:要求系统配备的激光雷达、毫米波雷达、摄像头等传感器具备高精度的感知能力。激光雷达需能精确测量目标距离和方位,精度达到厘米级;摄像头要能清晰识别各类交通标志、标线和目标物体,分辨率满足复杂场景识别需求。同时,通过先进的传感器融合算法,将不同类型传感器数据进行整合,消除单一传感器的局限性,实现对周围环境的全面、准确感知。
算法与决策能力:强大的算法是自动驾驶系统决策的核心。基于深度学习的目标识别算法,能够快速准确地识别行人、车辆、交通信号灯等目标。路径规划算法则根据感知信息,实时规划出安全、高效的行驶路径,考虑因素包括交通规则、路况、其他车辆行驶状态等。在路口遇到交通信号灯变化时,系统能迅速决策是加速通过还是减速停车。
2.3 人机交互要求
系统状态反馈:在自动驾驶模式下,系统需实时向驾驶员展示车辆运行状态,如车速、行驶方向、自动驾驶系统工作模式等信息。通过仪表盘、中控大屏等显示设备,以直观的图形和文字形式呈现,让驾驶员随时了解车辆动态。
接管请求与响应:当系统需要驾驶员接管时,会提前发出多种形式的提示,包括语音警报、视觉闪烁提示等。并且明确规定了接管时间窗口,一般在发出接管请求后的 10 秒内,驾驶员应完成接管操作。同时,系统会持续监测驾驶员状态,确保其在必要时能够迅速响应。

2.4 数据记录与存储要求
关键数据记录:自动驾驶车辆需记录大量关键数据,涵盖车辆行驶参数,如车速、加速度、转向角度;传感器原始数据,如激光雷达点云数据、摄像头图像数据;以及系统运行状态数据,包括自动驾驶系统的决策过程、故障信息等。这些数据为后续事故分析、系统优化提供了丰富素材。
数据存储与管理:数据存储需具备安全性和可靠性,防止数据丢失或被篡改。采用加密存储技术,确保数据隐私。同时,建立完善的数据管理系统,方便数据的检索、分析和长期保存。
3. L3 自动驾驶概述
根据国际自动机工程师学会(SAE)制定的自动驾驶分级标准,L3 级自动驾驶被定义为有条件的自动化。在特定的场景下,如路况良好的高速公路上,ADS 介入后,车辆可以自动完成加速、制动、转向等几乎所有的驾驶操作,驾驶员可以将注意力从驾驶操作中解放出来,进行一些其他活动,如办公、娱乐等。然而,当系统检测到自身无法应对的复杂情况,如恶劣天气导致传感器失效、道路出现严重障碍物等,就会启动最小风险策略,并向驾驶员发出接管请求。驾驶员需要在规定时间内接管车辆,重新掌控驾驶权。

L3 级自动驾驶是自动驾驶发展中的一个重要分水岭,它标志着车辆从辅助驾驶向高度自动化驾驶的迈进,为未来更高级别的自动驾驶奠定了基础。但由于驾驶员与系统之间的责任划分较为复杂,以及技术的可靠性和安全性仍需进一步验证,L3 级自动驾驶的商业化进程一直受到一定的限制。
4. GB/T 44721-2024 与 L3 自动驾驶的关系
4.1 技术规范支撑
GB/T 44721-2024 为 L3 自动驾驶提供了详细的技术规范和要求,明确了 ADS 介入条件、驾驶员接管流程以及最小风险策略执行等各个环节应遵循的标准。这有助于统一行业技术标准,促进 L3 自动驾驶技术的规范化发展,减少因技术差异导致的安全隐患。
4.2 安全保障依据
标准中对功能安全、环境感知、人机交互等方面的严格要求,为 L3 自动驾驶的安全运行提供了有力保障。尤其是对最小风险策略和驾驶员接管的规范,确保在系统出现异常或遇到超出能力范围的情况时,能够保障车辆和人员的安全,有效降低事故风险。
4.3 商业化推进助力
该标准的发布为 L3 自动驾驶的商业化提供了技术依据和法规支持。与此同时,2024 年 12 月 31 日,北京市第十六届人民代表大会常务委员会第十四次会议表决通过了《北京市自动驾驶汽车条例》,自 2025 年 4 月 1 日起施行 。该条例对自动驾驶创新应用活动进行了全环节规范,实行包容审慎监管,明确了自动驾驶汽车安全保障的相关要求。GB/T 44721-2024 标准与北京的这一地方条例相互配合,从国家和地方层面共同发力。监管部门可以依据标准和条例对 L3 自动驾驶车辆进行认证和监管,企业也能更加明确产品研发和生产方向,特别是在 ADS 介入、驾驶员接管等关键功能的实现上,加速 L3 自动驾驶技术的商业化进程。例如,北京的条例规定了自动驾驶汽车用于个人乘用车出行等应用场景,企业在符合 GB/T 44721-2024 标准的基础上,可依据地方条例开展相关技术应用和市场推广。

5. 华为问界汽车与 GB/T 44721-2024
华为问界系列汽车作为智能网联汽车的代表之一,在自动驾驶技术的应用和发展上取得了显著的成果。以问界 M5、M7 等车型搭载的 HUAWEI ADS 智能驾驶系统为例,其在多个方面体现了对 GB/T 44721-2024 标准的遵循和实践。

5.1 功能安全层面
HUAWEI ADS 智能驾驶系统通过了德国莱茵 TÜV 集团颁发的《ISO 26262:2018 功能安全管理体系认证证书》,达到汽车功能安全最高等级 ASIL D 认证。这表明其在系统设计和开发过程中,充分考虑了功能安全和预期功能安全,具备完善的故障诊断和冗余设计,在面对系统故障时,能够迅速启动最小风险策略,保障车辆和乘客安全,与 GB/T 44721-2024 中对功能安全的要求高度契合。
5.2 环境感知与决策能力
问界系列车型配备了先进的传感器融合技术,包括激光雷达、毫米波雷达、摄像头等多种传感器,能够实现对周围环境的全方位、高精度感知。当满足特定的道路和驾驶条件时,HUAWEI ADS 会精准介入,基于强大的算法和计算平台,系统能够快速、准确地处理感知数据,做出合理的驾驶决策,满足标准中对环境感知与决策的要求。例如,在复杂的城市道路环境中,系统能够准确识别交通信号灯、行人、车辆等目标,并及时做出相应的驾驶动作。
5.3 人机交互体验
华为问界汽车注重人机交互设计,车内配备了大尺寸中控屏和智能语音助手,驾驶员可以通过语音指令轻松控制车辆的各种功能。在 HUAWEI ADS 介入的自动驾驶模式下,系统会实时向驾驶员反馈车辆的运行状态和自动驾驶系统的工作情况,当需要驾驶员接管时,会提前发出清晰的语音和视觉提示,给予驾驶员足够的反应时间,确保驾驶员能够顺利接管车辆,这一系列设计符合 GB/T 44721-2024 中对人机交互的要求,提升了驾驶的安全性和舒适性。
5.4 数据记录与分析
问界系列车型具备数据记录和存储功能,能够记录车辆在行驶过程中的各种数据,包括 HUAWEI ADS 的运行数据、传感器数据以及驾驶员接管相关数据等。这些数据可以用于后续的数据分析和系统优化,有助于不断提升自动驾驶系统的性能和安全性,特别是在研究 ADS 介入时机、驾驶员接管效率以及最小风险策略效果等方面,数据能够提供关键依据,同时也符合标准中对数据记录与存储的要求。
通过对华为问界汽车的分析可以看出,GB/T 44721-2024 标准为汽车智驾系统的研发和应用提供了明确的指导方向,促使企业不断提升技术水平,保障自动驾驶车辆的安全和可靠运行。而在实际应用场景拓展和商业化落地方面,类似北京自动驾驶汽车条例这样的地方政策,也为企业创造了更有利的发展环境。
6.最后
GB/T 44721-2024《智能网联汽车 自动驾驶系统通用技术要求》的发布,对于我国自动驾驶技术的发展具有里程碑式的意义。它与 L3 自动驾驶之间存在着紧密的联系,为 L3 自动驾驶的技术规范、安全保障和商业化推进提供了坚实的支撑,尤其是在 ADS 介入、最小风险策略和驾驶员接管等关键环节上,给出了明确的标准和指导。同时,2024 年底北京市发布的自动驾驶条例,从地方层面进一步规范和推动了自动驾驶汽车的创新应用和产业发展,与国家标准形成互补。以华为问界汽车为代表的智能网联汽车,通过对该标准的遵循和实践,展示了标准在汽车智驾系统中的重要指导作用。随着标准的不断完善和实施,以及各地相关政策的陆续出台,加上技术的持续创新,相信 L3 自动驾驶将逐渐走进人们的生活,为我们带来更加便捷、高效、安全的出行体验。在未来,我们期待看到更多符合标准要求的自动驾驶车辆上路,共同推动智能交通行业的蓬勃发展。
附录:
GB/T 44721-2024《智能网联汽车 自动驾驶系统通用技术要求》下载地址:
https://openstd.samr.gov.cn/bzgk/gb/newGbInfo?hcno=8AA1E95193C35E2BFF390DBE5B986DE8
北京自动驾驶条例查看地址:
北京市自动驾驶汽车条例_地方性法规_首都之窗_北京市人民政府门户网站
相关文章:
GB/T 44721-2024 与 L3 自动驾驶:自动驾驶新时代的基石与指引
1.前言 在智能网联汽车飞速发展的当下,自动驾驶技术成为了行业变革的核心驱动力。从最初的辅助驾驶功能,到如今不断迈向高度自动化的征程,每一步都凝聚着技术的创新与突破。而在这一进程中,标准的制定与完善对于自动驾驶技术的规…...

AURIX TC275学习笔记3 官方例程 (UART LED WDT)
文章目录 参考资料1. ASCLIN_UART_12. GPIO_LED_Button_13. WDT (Watch Dog Timer) 参考资料 AURIX TC275学习笔记1 资料收集Getting Started with AURIX™ Development Studio 官方帮助文档happy hacking for TC275! 硬件平台使用AURIX™ TC275 Lite 套件,按照参…...

Vim的基础命令
移动光标 H(左) J(上) K(下) L(右) $ 表示移动到光标所在行的行尾, ^ 表示移动到光标所在行的行首的第一个非空白字符。 0 表示移动到光标所在行的行首。 W 光标向前跳转一个单词 w光标向前跳转一个单词 B光标向后跳转一个单词 b光标向后跳转一个单词 G 移动光标到…...

Linux的简单使用和部署4asszaaa0
一.部署 1 环境搭建方式主要有四种: 1. 直接安装在物理机上.但是Linux桌面使用起来非常不友好.所以不建议.[不推荐]. 2. 使用虚拟机软件,将Linux搭建在虚拟机上.但是由于当前的虚拟机软件(如VMWare之类的)存在⼀些bug,会导致环境上出现各种莫名其妙的问题比较折腾.[非常不推荐…...

Linux 的 sysfs 伪文件系统介绍【用户可以通过文件操作与内核交互(如调用内核函数),而无需编写内核代码】
1. 什么是 sysfs伪文件系统? sysfs 是 Linux 内核提供的 伪文件系统,用于向用户空间暴露内核对象的信息和控制接口。它是 procfs 的补充,主要用于管理 设备、驱动、内核子系统 等信息,使用户可以通过文件操作(如用户空…...

每日一题洛谷P5721 【深基4.例6】数字直角三角形c++
#include<iostream> using namespace std; int main() {int n;cin >> n;int t 1;for (int i 0; i < n; i) {for (int j 0; j < n - i; j) {printf("%02d",t);t;}cout << endl;}return 0; }...

计算机网络笔记再战——理解几个经典的协议1
目录 前言 从协议是什么出发 关于TCP/IP协议体系 几个传输方式的分类 地址 网卡 中继器(Repeater) 网桥(Bridge) 路由器(Router) 网关 前言 笔者最近正在整理(笔者开的坑不少…...

ElasticSearch学习笔记-解析JSON格式的内容
如果需要屏蔽其他项目对Elasticsearch的直接访问操作,统一由一个入口访问操作Elasticsearch,可以考虑直接传入JSON格式语句解析执行。 相关依赖包 <properties><elasticsearch.version>7.9.3</elasticsearch.version><elasticsea…...
浅谈密码相关原理及代码实现
本代码仅供学习、研究、教育或合法用途。开发者明确声明其无意将该代码用于任何违法、犯罪或违反道德规范的行为。任何个人或组织在使用本代码时,需自行确保其行为符合所在国家或地区的法律法规。 开发者对任何因直接或间接使用该代码而导致的法律责任、经济损失或…...
Spring Boot常用注解深度解析:从入门到精通
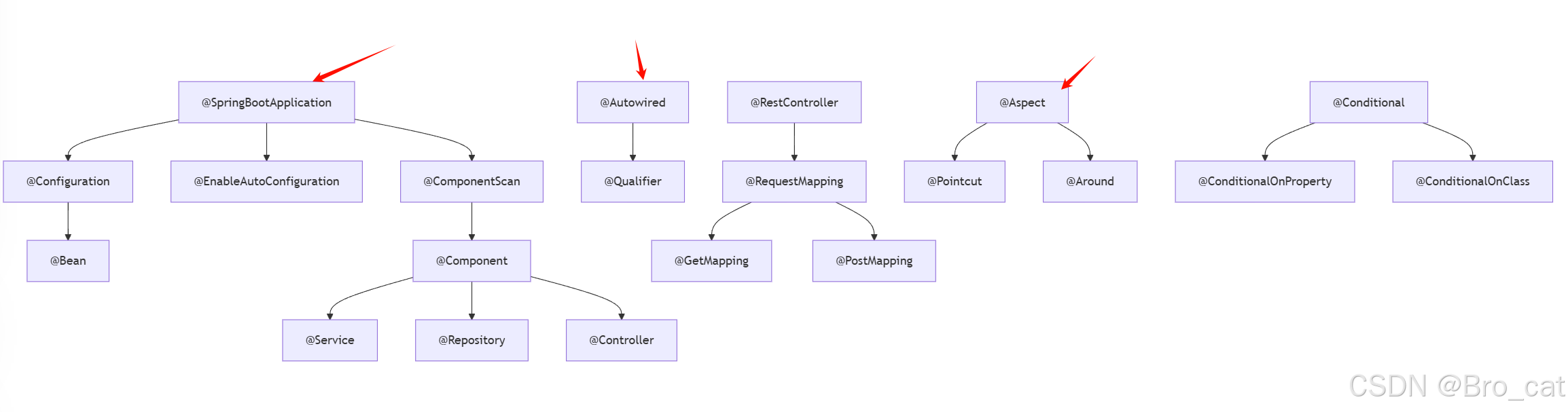
今天,这篇文章带你将深入理解Spring Boot中30常用注解,通过代码示例和关系图,帮助你彻底掌握Spring核心注解的使用场景和内在联系。 一、启动类与核心注解 1.1 SpringBootApplication 组合注解: SpringBootApplication Confi…...
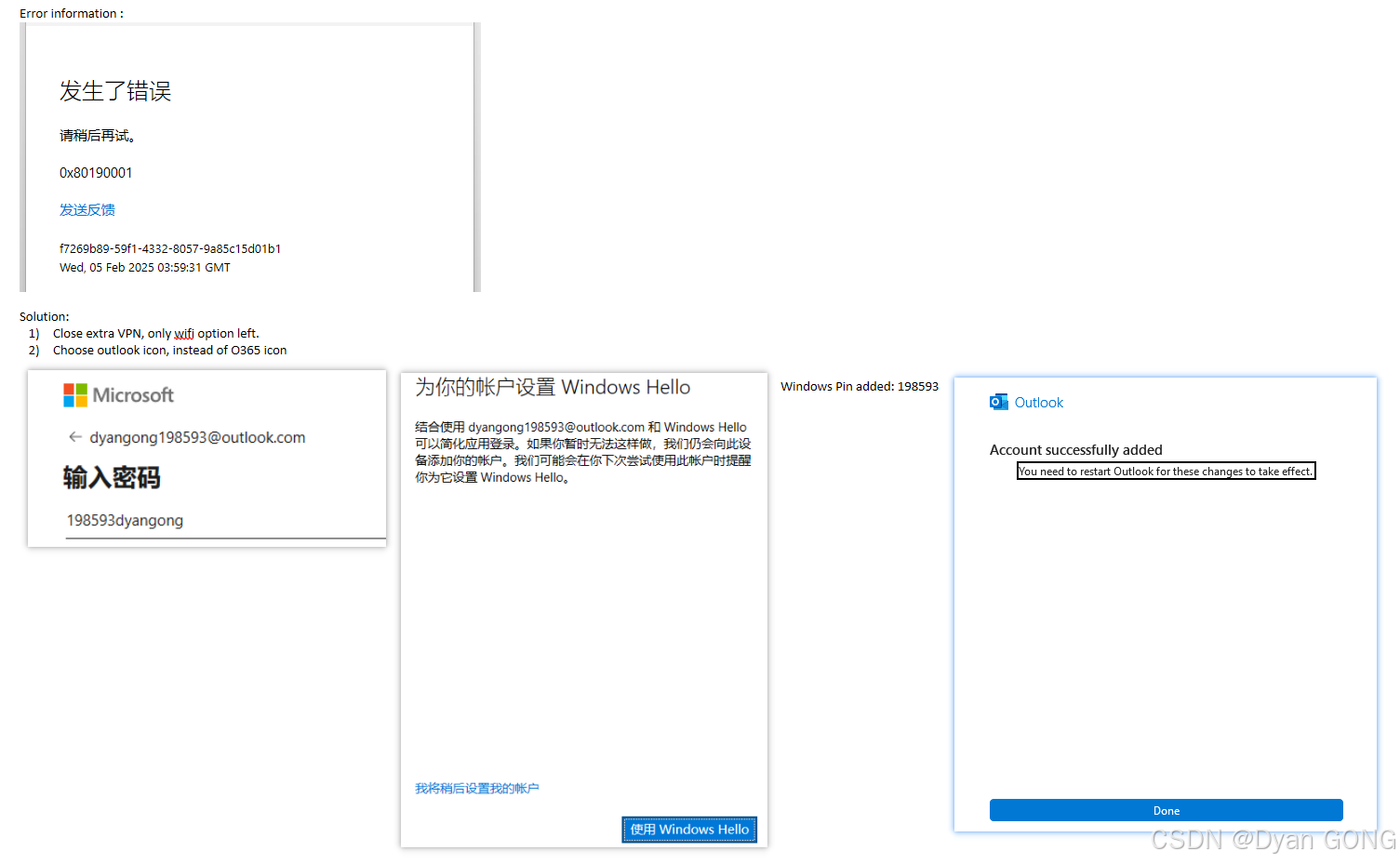
can not add outlook new accounts on the outlook
link : Reference url...
私有化部署 DeepSeek + Dify,构建你的专属私人 AI 助手
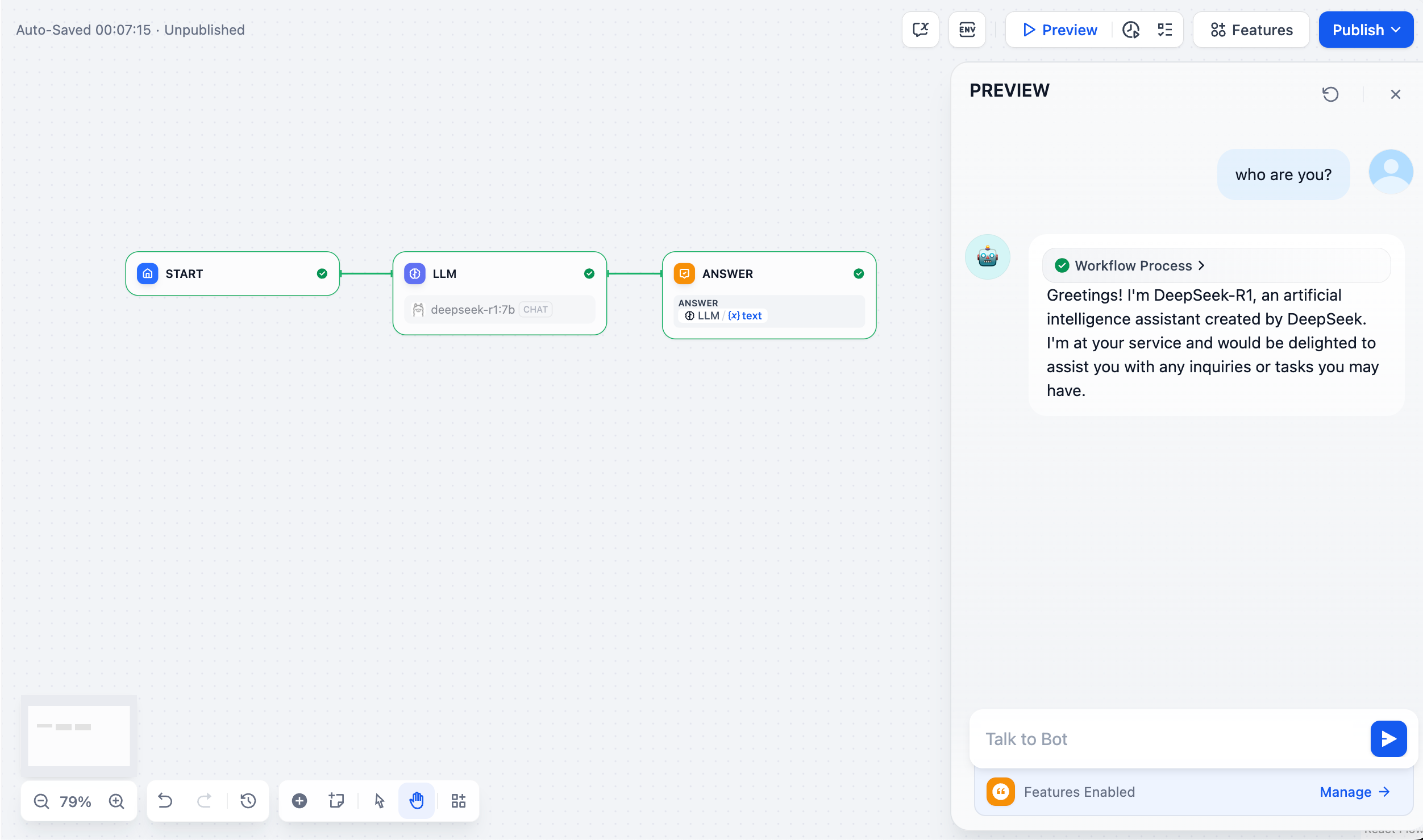
私有化部署 DeepSeek Dify,构建你的专属私人 AI 助手 概述 DeepSeek 是一款开创性的开源大语言模型,凭借其先进的算法架构和反思链能力,为 AI 对话交互带来了革新性的体验。通过私有化部署,你可以充分掌控数据安全和使用安全。…...

【Elasticsearch】post_filter
post_filter是 Elasticsearch 中的一种后置过滤机制,用于在查询执行完成后对结果进行过滤。以下是关于post_filter的详细介绍: 工作原理 • 查询后过滤:post_filter在查询执行完毕后对返回的文档集进行过滤。这意味着所有与查询匹配的文档都…...

验证工具:GVIM和VIM
一、定义与关系 gVim:gVim是Vim的图形界面版本,提供了更多的图形化功能,如菜单栏、工具栏和鼠标支持。它使得Vim的使用更加直观和方便,尤其对于不习惯命令行界面的用户来说。Vim:Vim是一个在命令行界面下运行的文本编…...
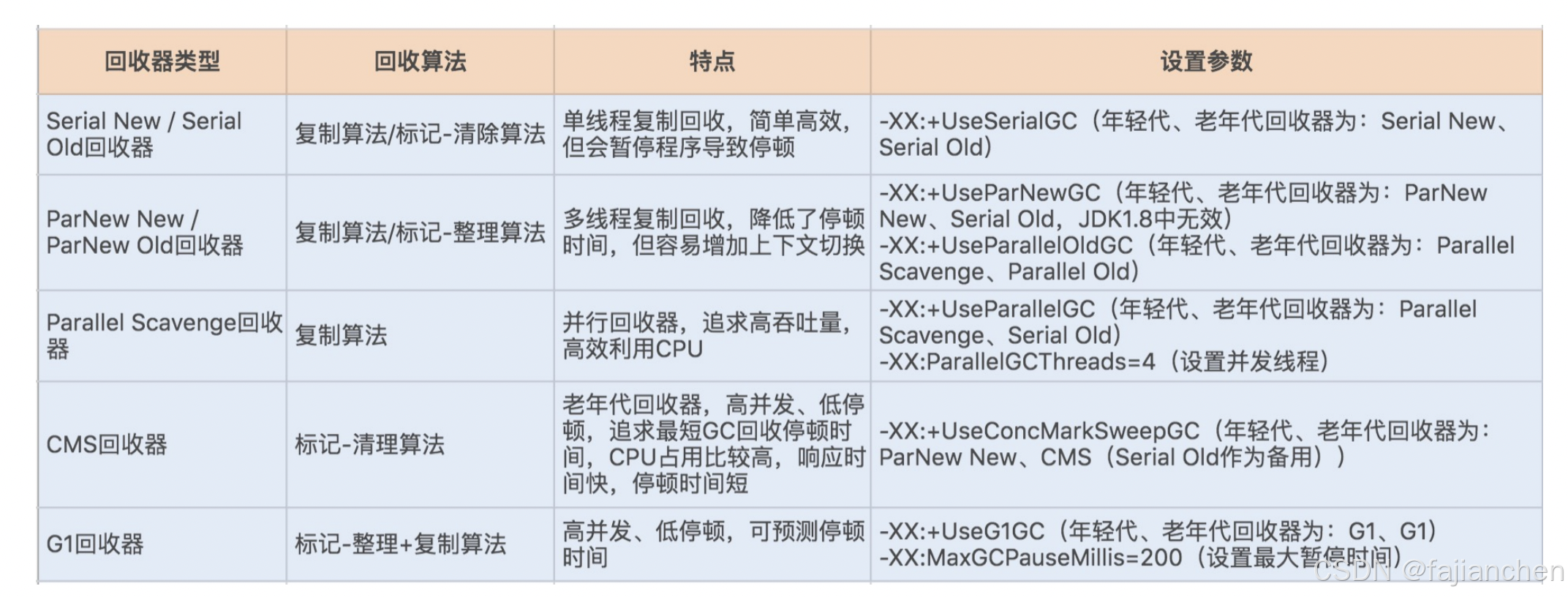
如何优化垃圾回收机制?
垃圾回收机制 掌握 GC 算法之前,我们需要先弄清楚 3 个问题。第一,回收发生在哪里?第二,对象在 什么时候可以被回收?第三,如何回收这些对象? 回收发生在哪里? JVM 的内存区域中&…...

beyond the ‘PHYSICAL‘ memory limit.问题处理
Container [pid5616,containerIDcontainer_e50_1734408743176_3027740_01_000006] is running 507887616B beyond the ‘PHYSICAL’ memory limit. Current usage: 4.5 GB of 4 GB physical memory used; 6.6 GB of 8.4 GB virtual memory used. Killing container. 1.增大map…...

Day36【AI思考】-表达式知识体系总览
文章目录 **表达式知识体系总览**回答1:**表达式知识体系****一、三种表达式形式对比****二、表达式转换核心方法****1. 中缀转后缀(重点)****2. 中缀转前缀** **三、表达式计算方法****1. 后缀表达式计算(栈实现)****…...
调试)
段错误(Segmentation Fault)调试
1. 使用 GDB(GNU Debugger) GDB 是一个强大的调试工具,可以帮助你逐步执行程序并检查变量状态。 编译时添加调试信息: gcc -g your_program.c -o your_program启动 GDB: gdb ./your_program运行程序: …...
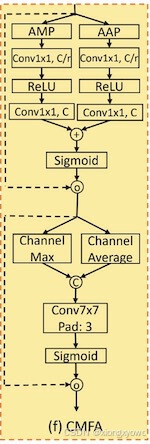
每日Attention学习19——Convolutional Multi-Focal Attention
每日Attention学习19——Convolutional Multi-Focal Attention 模块出处 [ICLR 25 Submission] [link] UltraLightUNet: Rethinking U-shaped Network with Multi-kernel Lightweight Convolutions for Medical Image Segmentation 模块名称 Convolutional Multi-Focal Atte…...

LeetCode题练习与总结:三个数的最大乘积--628
一、题目描述 给你一个整型数组 nums ,在数组中找出由三个数组成的最大乘积,并输出这个乘积。 示例 1: 输入:nums [1,2,3] 输出:6示例 2: 输入:nums [1,2,3,4] 输出:24示例 3&a…...
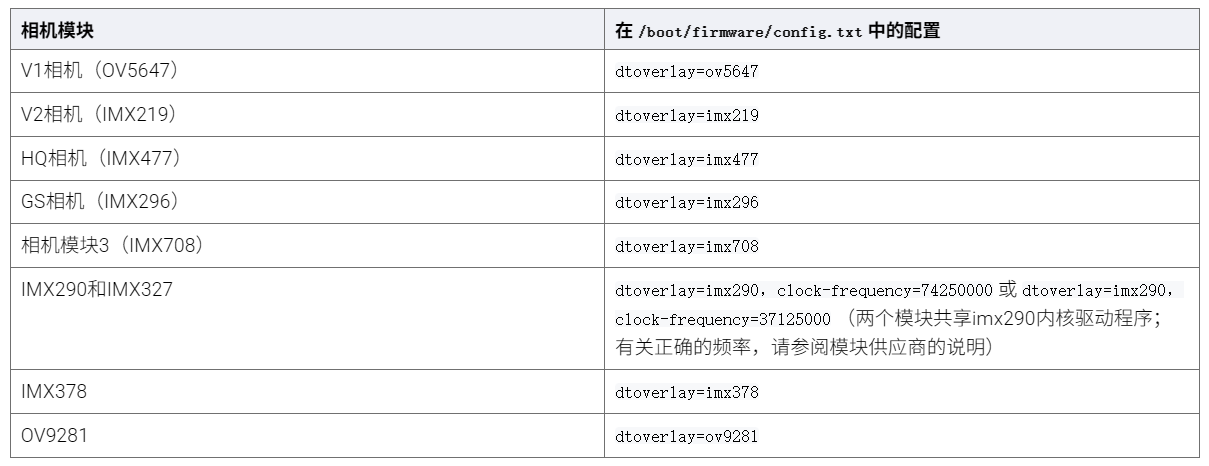
树莓派超全系列教程文档--(61)树莓派摄像头高级使用方法
树莓派摄像头高级使用方法 配置通过调谐文件来调整相机行为 使用多个摄像头安装 libcam 和 rpicam-apps依赖关系开发包 文章来源: http://raspberry.dns8844.cn/documentation 原文网址 配置 大多数用例自动工作,无需更改相机配置。但是,一…...

反向工程与模型迁移:打造未来商品详情API的可持续创新体系
在电商行业蓬勃发展的当下,商品详情API作为连接电商平台与开发者、商家及用户的关键纽带,其重要性日益凸显。传统商品详情API主要聚焦于商品基本信息(如名称、价格、库存等)的获取与展示,已难以满足市场对个性化、智能…...

Oracle查询表空间大小
1 查询数据库中所有的表空间以及表空间所占空间的大小 SELECTtablespace_name,sum( bytes ) / 1024 / 1024 FROMdba_data_files GROUP BYtablespace_name; 2 Oracle查询表空间大小及每个表所占空间的大小 SELECTtablespace_name,file_id,file_name,round( bytes / ( 1024 …...

在 Nginx Stream 层“改写”MQTT ngx_stream_mqtt_filter_module
1、为什么要修改 CONNECT 报文? 多租户隔离:自动为接入设备追加租户前缀,后端按 ClientID 拆分队列。零代码鉴权:将入站用户名替换为 OAuth Access-Token,后端 Broker 统一校验。灰度发布:根据 IP/地理位写…...
)
相机Camera日志分析之三十一:高通Camx HAL十种流程基础分析关键字汇总(后续持续更新中)
【关注我,后续持续新增专题博文,谢谢!!!】 上一篇我们讲了:有对最普通的场景进行各个日志注释讲解,但相机场景太多,日志差异也巨大。后面将展示各种场景下的日志。 通过notepad++打开场景下的日志,通过下列分类关键字搜索,即可清晰的分析不同场景的相机运行流程差异…...
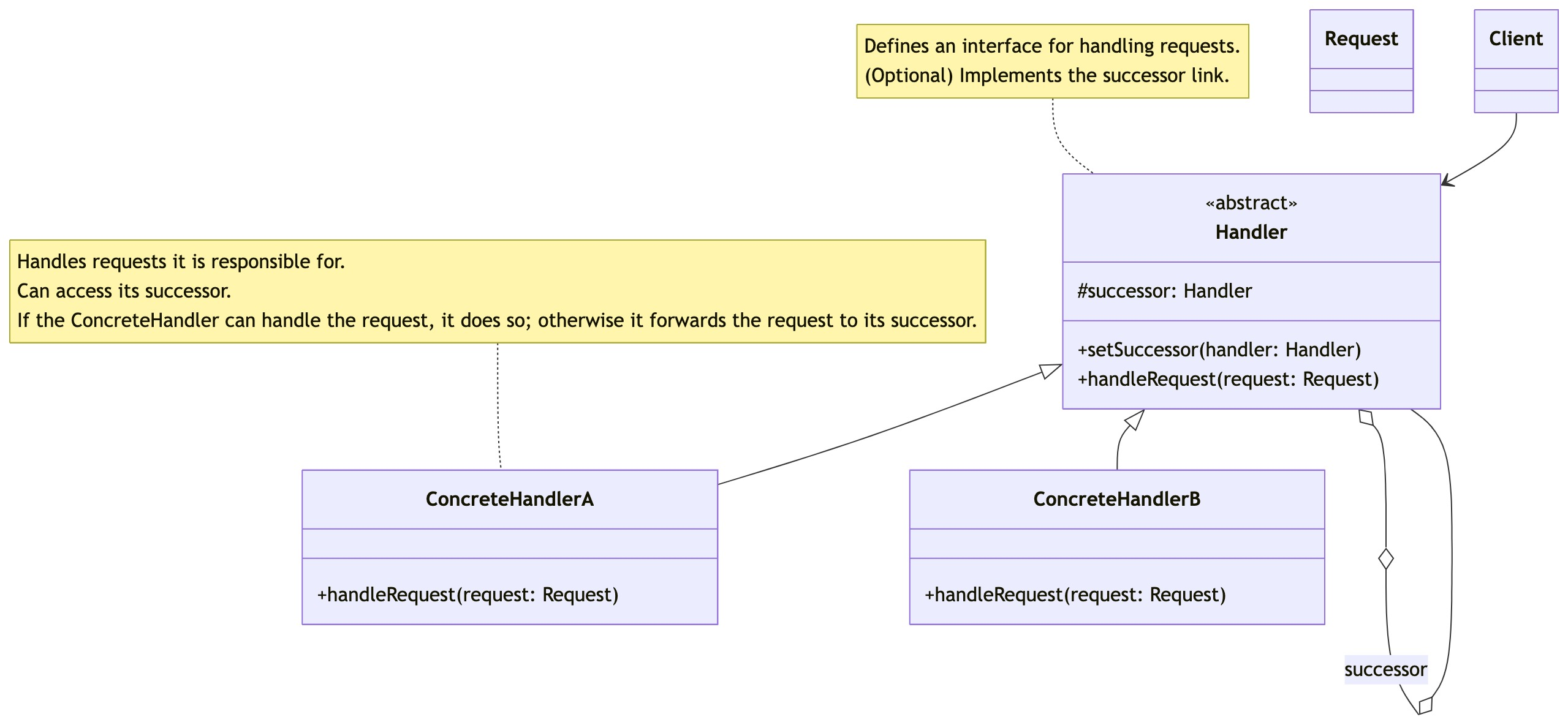
零基础设计模式——行为型模式 - 责任链模式
第四部分:行为型模式 - 责任链模式 (Chain of Responsibility Pattern) 欢迎来到行为型模式的学习!行为型模式关注对象之间的职责分配、算法封装和对象间的交互。我们将学习的第一个行为型模式是责任链模式。 核心思想:使多个对象都有机会处…...

MySQL中【正则表达式】用法
MySQL 中正则表达式通过 REGEXP 或 RLIKE 操作符实现(两者等价),用于在 WHERE 子句中进行复杂的字符串模式匹配。以下是核心用法和示例: 一、基础语法 SELECT column_name FROM table_name WHERE column_name REGEXP pattern; …...

#Uniapp篇:chrome调试unapp适配
chrome调试设备----使用Android模拟机开发调试移动端页面 Chrome://inspect/#devices MuMu模拟器Edge浏览器:Android原生APP嵌入的H5页面元素定位 chrome://inspect/#devices uniapp单位适配 根路径下 postcss.config.js 需要装这些插件 “postcss”: “^8.5.…...

AI病理诊断七剑下天山,医疗未来触手可及
一、病理诊断困局:刀尖上的医学艺术 1.1 金标准背后的隐痛 病理诊断被誉为"诊断的诊断",医生需通过显微镜观察组织切片,在细胞迷宫中捕捉癌变信号。某省病理质控报告显示,基层医院误诊率达12%-15%,专家会诊…...
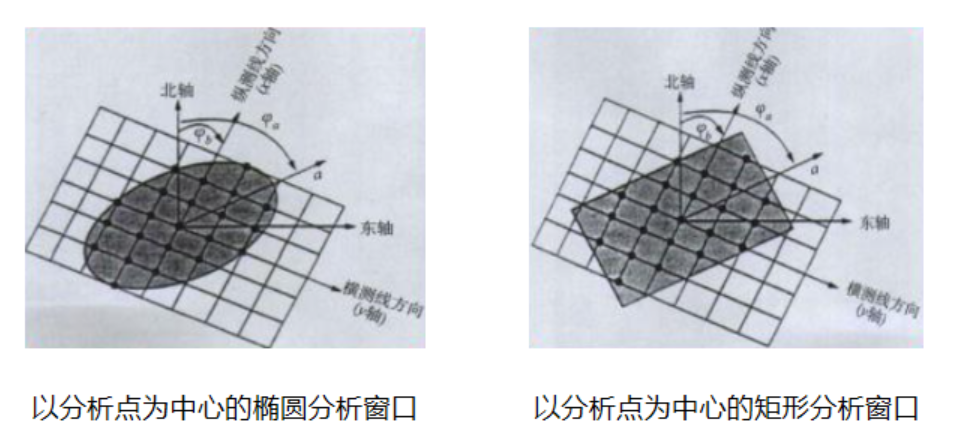
论文笔记——相干体技术在裂缝预测中的应用研究
目录 相关地震知识补充地震数据的认识地震几何属性 相干体算法定义基本原理第一代相干体技术:基于互相关的相干体技术(Correlation)第二代相干体技术:基于相似的相干体技术(Semblance)基于多道相似的相干体…...