【单目标优化算法】食肉植物优化算法(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
1.1 初始化
1.2 分类和分组
1.3 生长
1.4 繁殖
1.5 重组过程
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现

💥1 概述
食肉植物算法(CPA)从随机初始化一组解决方案开始。然后将溶液分类为食肉植物和猎物,然后根据生长和繁殖过程进行分组。它们的适应值将更新,所有解决方案都将合并。该过程将继续,直到满足终止条件。每个过程的细节解释如下:
1.1 初始化
CPA是一种基于种群的优化算法,因此,它从初始化潜在问题的潜在解的种群开始。首先,在湿地中随机初始化由食肉植物和猎物组成的个体种群。食肉植物和猎物的数量分别表示为NCPLANT和NPREY。
1.2 分类和分组
接下来,根据其适应度值按升序对等式(2)中的每个个体进行排序(考虑最小化问题)。排序种群的顶部植物解被认为是食肉植物CP,而剩余解(nPrey)是猎物猎物。图2展示了食肉植物和猎物的可视化。排序适应度和排序总体的矩阵可描述为不等式。分组过程需要模拟每个食肉植物及其猎物的环境。在分组过程中,具有最佳适应值的猎物被分配给排名第一的食肉植物。类似地,第二和第三类猎物分别被分配到第二和第三类食肉植物。重复该过程,直到NCplanth级猎物被分配到NCplanth级食肉植物。然后,将第1级猎物分配给第一级食肉植物,以此类推。CPA中的分组过程如下图所示。3.这一分组对于减少有助于肉食性植物生长的许多劣质猎物的可能性至关重要,这对于提高肉食性植物的生存能力非常重要。
1.3 生长
由于土壤营养贫乏,肉食性植物为了生长而吸引、捕获和消化猎物。猎物被其甜美的气味吸引到植物身上,但可能会间歇性地成功逃脱食肉植物的魔爪。这里,引入了吸引率。对于每组,随机选择一个猎物。如果吸引率高于随机生成的数字,则食肉植物会捕获并消化猎物以进行生长。
1.4 繁殖
食肉植物从猎物身上吸收养分,并利用这些养分进行生长和繁殖。就繁殖而言,只有排名第一的食肉植物,即。E种群中最好的解决方案是允许繁殖。这是为了确保CPA的开发只关注最佳解决方案。可以避免对其他解决方案进行不必要的利用,从而节省计算成本。
1.5 重组过程
新产生的食肉植物和猎物与以前的种群相结合,形成一个新的种群[n nCPlant(group_iter)nCPlant]×d维度。更具体地说,个体、nCPlant(groupiter)个体和nCPlant个体分别是来自原始种群、生长过程和繁殖过程的个体。随后,根据适应度值按升序对这组新个体进行排序。然后从该组中选择排名前N的个体作为新的候选解决方案。因此,这种精英主义选择策略确保选择更合适的解决方案在下一代中进行繁殖。
📚2 运行结果

部分代码:
function [best,fmin]=CPA(Lb,Ub,Dim,opt,tol)
obj=zeros(1,tol);
%Define CPA parameters values
group_iter = 2;
attraction_rate = 0.8;
growth_rate = 2;
reproduction_rate = 1.8;
nCP = 10;
nPrey = 20;
nPop=nCP+nPrey;
% Initialize Carnivorous Plants and their surrounding food
ini.position=[];
ini.cost=[];
life=repmat(ini,nPop,1);
NewCP=repmat(ini,nCP*group_iter+nCP,1);
life=CreateInitialPopulation(life,Dim,Ub,Lb);
%Find the current best
for x=1:nCP+nPrey
costs(x,:)=life(x).cost;
end
[fmin,I]=min(costs);
best=life(I).position;
%Find the distance between best and optima solution for 1st row
distance=dist(best,opt);
N_iter=1;
%Start the iterations
for t=1:tol
% Group the Carnivorous Plants with their nearby surrounding foods
% based on distance.
[CP,life]=CPA_Grouping(life,nCP,nPrey,group_iter,N_iter);
% Grow new Carnivorous Plants by hunting preys and birth new preys
% if it is not being hunted.
[NewCP,a]=CPA_Growth(CP,NewCP,Dim,attraction_rate,growth_rate,group_iter);
% Mating between Carnivorous Plants and the best Carnivorous Plants
NewCP=CPA_Reproduction(CP,NewCP,Dim,reproduction_rate,a);
% Check the position and update the cost of NewCP
NewCP=CPA_UpdateCost(NewCP,Dim,Lb,Ub);
% Combine NewCP and pop
[life,BestIndex]=CPA_Combine(NewCP,life);
% Update Best Solution Ever Found
BestSol=life(BestIndex);
%Find current global best
fmin=BestSol.cost;
best=BestSol.position;
%Find the distance between best and optima solution for the rest of
%the row
distance=dist(best,opt);
N_iter=N_iter+1;
obj(t) =fmin;
plot(obj(1:t),'r','LineWidth',2);
xlabel('迭代次数')
ylabel('最优解')
title('食肉植物优化算法')
drawnow
% if N_iter >= 14000
% break;
% end
end
ElapsedTime=toc;
% Output/display the final result
disp(['Total computational time used is ',num2str(ElapsedTime),' seconds'])
disp(['Total number of function evaluation = ',num2str(nPop+(N_iter-1)*(nCP*group_iter+nCP))])
disp(['Best solution = ',num2str(best,'% .8f')])
disp(['Fmin = ',num2str(fmin,'% .8f')])
function [CP,pop]=CPA_Grouping(pop,nCP,nPrey,Group_Iter,it)
empty_Prey.position=[];
empty_Prey.cost=[];
Select=reshape(1:nPrey,nCP,[]);
% First, sort the population
if it==1
for x=1:nCP+nPrey
costs(x,:)=pop(x).cost;
end
else
for x=1:(2+Group_Iter)*nCP+nPrey
costs(x,:)=pop(x).cost;
end
end
for i=1:nCP+nPrey
[~, I]=min(costs);
index(i)=I;
costs(I)=10^30;
end
pop=pop(index);
Plant=pop(1:nCP);
Prey=pop(nCP+1:end);
empty_CP.Plant=[];
empty_CP.Prey=repmat(empty_Prey,0,1);
empty_CP.nPrey=0;
CP=repmat(empty_CP,nCP,1);
% Group the Carnivorous Plants with their nearby Preys
for q=1:nCP
CP(q).Plant=Plant(q);
for r=1:nPrey/nCP
CP(q).Prey=[CP(q).Prey
Prey(Select(q,r))];
CP(q).nPrey=CP(q).nPrey+1;
end
end
function [NewCP,a]=CPA_Growth(CP,NewCP,Dim,HuntingChance,alpha,Group_Iter)
a=1;
nCP=numel(CP);
for Grp=1:nCP
for Group_cycle=1:Group_Iter
v=randi(CP(Grp).nPrey);
if HuntingChance>rand %Growth of Carnivorous Plant by hunting prey
Step=alpha.*rand(1,Dim);
NewCP(a).position=Step.*CP(Grp).Plant.position...
+(1-Step).*CP(Grp).Prey(v).position;
a=a+1;
else %Mating of Prey
%To ensure prey v and prey j are different
u=v;
while v==u
u=randi(CP(Grp).nPrey);
end
Step=alpha.*rand(1,Dim);
if CP(Grp).Prey(v).cost<CP(Grp).Prey(u).cost
Step=1-Step; %So that it moves to good prey
end
NewCP(a).position=Step.*CP(Grp).Prey(u).position...
+(1-Step).*CP(Grp).Prey(v).position;
a=a+1;
end
end
end
function NewCP=CPA_Reproduction(CP,NewCP,Dim,alpha,a)
%Mating of Carnivorous Plant
for i=1:numel(CP)
for j=1:Dim
%To ensure plant j and plant v are different
v=i;
while v==i
v=randi(numel(CP));
end
Step=CP(i).Plant.position(j)-CP(v).Plant.position(j);
if CP(v).Plant.cost<CP(i).Plant.cost
Step=-Step; %So that it moves to good plant
end
NewCP(a).position(j)=CP(1).Plant.position(j)+alpha.*rand.*(Step);
end
a=a+1;
end
function NewCP=CPA_UpdateCost(NewCP,Dim,Lb,Ub)
n=numel(NewCP);
for i=1:n
Flag4ub=NewCP(i).position>Ub;
Flag4lb=NewCP(i).position<Lb;
NewCP(i).position=(NewCP(i).position.*(~(Flag4ub+Flag4lb)))...
+(rand(1,Dim).*(Ub-Lb)+Lb).*(Flag4ub+Flag4lb);
NewCP(i).cost=Fun(NewCP(i).position,Dim);
end
function [pop,BestIndex]=CPA_Combine(NewCP,pop)
pop=[pop
NewCP];
for i=1:size(pop,1)
costs(i,:)=pop(i).cost;
end
[~,BestIndex]=min(costs);
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]刘丁铨,高俊涛.基于食肉植物算法的状态序列搜索[J/OL].计算机系统应用:1-6[2023-02-01].DOI:10.15888/j.cnki.csa.008985.
🌈4 Matlab代码实现
相关文章:
【单目标优化算法】食肉植物优化算法(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...
)
ANTLR4入门学习(四)
ANTLR4入门学习(四)一、设计语法1.语法2.ANTLR核心标记3.常见计算机语言模式4.左右递归5.识别常见的语法结构5.1 匹配标识符5.2 匹配数字5.3 匹配字符串常量5.4 匹配注释和空白字符5.5 基础的语法规则5.6 划定词法分析器和语法分析器的界线一、设计语法 …...

Android okhttp3中发送websocket消息,并通过mockwebserver将一个安卓设备模拟成服务器接发消息
websocket 提供了客户端和服务端的长链接,允许客户端和服务端双向发送消息 okhttp 提供了使用websocket 相关接口议。同时为方便单元测试,又提供了mockwebserver可以把一个安卓客户端作为服务端接受消息。 websocket使用 权限 <uses-permission an…...
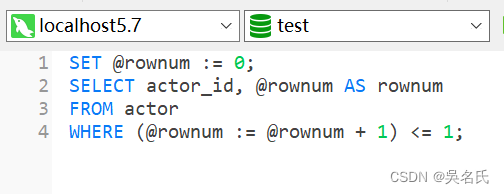
MySQL系统变量和自定义变量
1 系统变量1.1 查看系统变量可以使用以下命令查看 MySQL 中所有的全局变量信息。SHOW GLOBAL VARIABLES; MySQL 中的系统变量以两个“”开头。global 仅仅用于标记全局变量;session 仅仅用于标记会话变量;首先标记会话变量,如果会话变量不存在…...
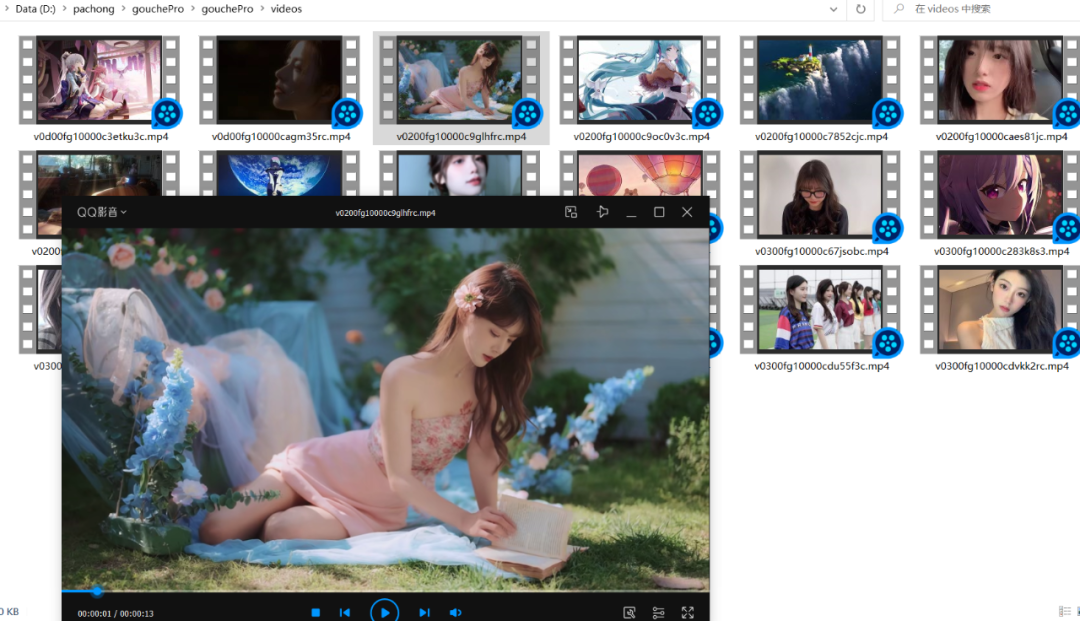
基于Python来爬取某音动态壁纸,桌面更香了!
至于小伙伴们想要这个封图,我也没有。不过继续带来一波靓丽壁纸,而且是动态的,我的桌面壁纸又换了:每天换着花样欣赏一波波动态壁纸桌面立刻拥有了高颜值,简直跟刷美女短视频一样啊。对的,这些动态壁纸就是…...
[数据库]表的约束
●🧑个人主页:你帅你先说. ●📃欢迎点赞👍关注💡收藏💖 ●📖既选择了远方,便只顾风雨兼程。 ●🤟欢迎大家有问题随时私信我! ●🧐版权:本文由[你帅…...

VisualGDB 5.6R9 FOR WINDOWS
Go cross-platform with comfort VisualGDB 是 Visual Studio 的一个非常强大的扩展,它允许您调试或调试嵌入式系统。这个程序有一个非常有吸引力的用户界面,它有许多调试或调试代码的功能。VisualGDB 还有一个向导可以帮助您调试程序,为您提…...

Yolov8的多目标跟踪实现
Yolov8_tracking 2023年2月,Yolov5发展到yolov8,这世界变得真快哦。Yolov8由ultralytics公司发布,yolov6-美团,yolov7-Alexey Bochkovskiy和Chien-Yao Wang,其各有高招,对yolov5均有提升。mikel-brostrom在…...
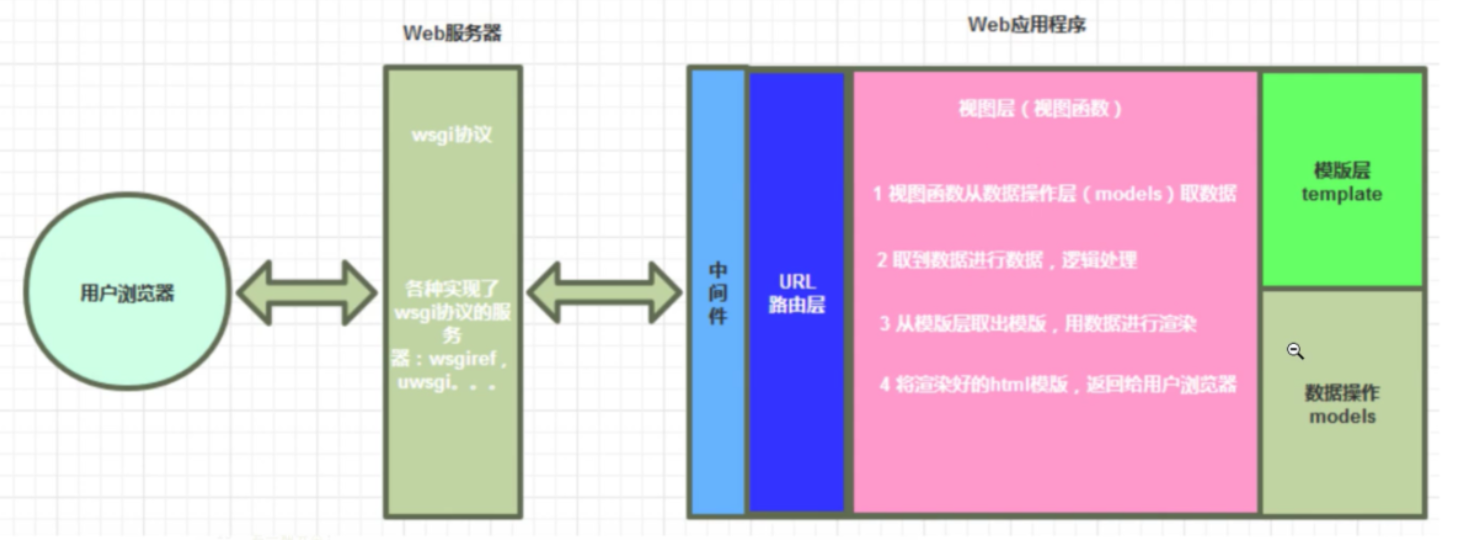
28--Django-后端开发-drf之自定义全局异常、接口文档生成以及三大认证源码分析
一、django请求的整个生命周期 旅程: drf处于的位置:路由匹配成功,进视图类之前 1、包装了新的request 2、处理了编码(urlencoded,formdata,json) 3、三大认证 4、进了视图类(GenericAPIView+ListModelMixin) 进行了过滤和排序去模型中取数据分页序列化返回5、处理了…...

【MyBatis】动态SQL
9、动态SQL Mybatis框架的动态SQL技术是一种根据特定条件动态拼装SQL语句的功能,它存在的意义是为了解决拼接SQL语句字符串时的痛点问题。 9.1、if if标签可通过test属性的表达式进行判断,若表达式的结果为true,则标签中的内容会执行&…...
LeetCode(剑指offer) Day1
1.用两个栈实现一个队列。队列的声明如下,请实现它的两个函数 appendTail 和 deleteHead ,分别完成在队列尾部插入整数和在队列头部删除整数的功能。(若队列中没有元素,deleteHead 操作返回 -1 ) 解题过程记录:本题就是用两个栈&…...

1、MyBatis框架——JDBC代码回顾与分析、lombok插件的安装与使用
目录 一、JDBC基本操作步骤 二、JDBC代码 三、lombok插件的安装与使用 1、lombok插件的安装 2、lombok常用注解 Data Getter Setter ToString AllArgsConstructor NoArgsConstructor 3、lombok的使用 四、JDBC代码分析 一、JDBC基本操作步骤 1、导包mysql-connect…...

笔记-GPS设备定位方式
1. 背景 最近接触到的GPS设备有点多,逐渐明白大家定位的机理,也结合网上的文章《GPS、WiFi、基站、AGPS几种定位原理介绍与区别》 来做一个简单的总结。 2. 基于GPS定位 这是最基本的定位能力,它主要就是寻找卫星,利用光传播速度…...

2023秋招携程SRE算法岗面试经验分享
本专栏分享 计算机小伙伴秋招春招找工作的面试经验和面试的详情知识点 专栏首页:秋招算法类面经分享 主要分享计算机算法类在面试互联网公司时候一些真实的经验 面试code学习参考请看:...
4.9 内部类
文章目录1.内部类概述2.特点3.练习 : 内部类入门案例4.成员内部类4.1 练习 : 被private修饰4.2 练习 : 被static修饰5.局部内部类6.匿名内部类1.内部类概述 如果一个类存在的意义就是为指定的另一个类,可以把这个类放入另一个类的内部。 就是把类定义在类的内部的情…...

ncnn模型精度验证
验证ncnn模型的精度 1、进行pth模型的验证 得到ncnn模型的顺序为:.pth–>.onnx–>ncnn .pth的精度验证如下: 如进行的是二分类: model init_model(model, data_cfg, devicedevice, modeeval)###.pth转.onnx模型# #---# input_names …...
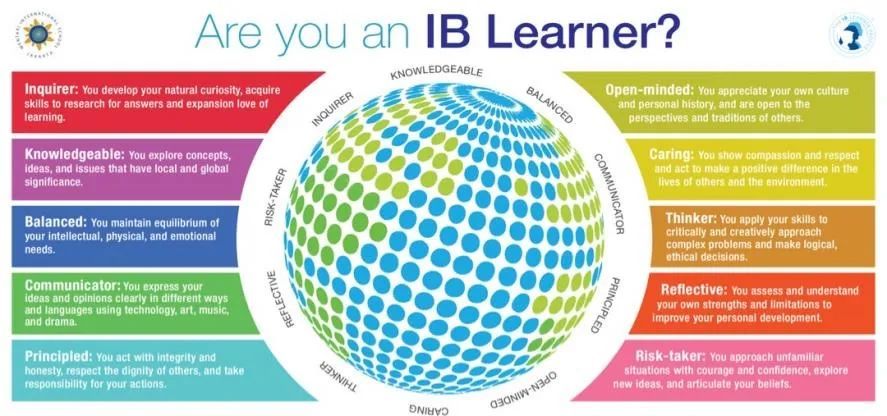
IB-PYP幼儿十大素质培养目标
作为IB候选学校,一直秉承IB教育的核心目标,贯彻在幼儿的学习生活中。IB教育之所以成为当今国际教育的领跑者,最主要的原因是IB教育是切切实实的“全人”教育,“素质”教育,拥有一套完整的教学服务体系。当我们走进IB“…...
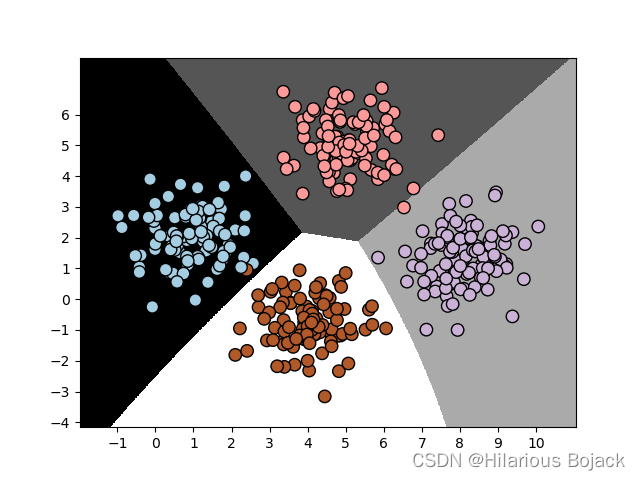
02.13:监督学习中的分类问题
今天首先学习了监督学习中的分类问题,跑了两个代码。现在学起来感觉机器学习有很多不同的定理建立了不同的分类器,也就是所谓不同的方法。具体的数学原理我不太清楚。然后不同的应用场景有一个最优的分类器。 值得一提的应该就是终于清晰的明白了精度&am…...

leetcode刷题 | 关于二叉树的题型总结3
leetcode刷题 | 关于二叉树的题型总结3 文章目录leetcode刷题 | 关于二叉树的题型总结3题目连接递增顺序搜索树二叉搜索树中的中序后继把二叉搜索树转换为累加树二叉搜索树迭代器题目连接 897. 递增顺序搜索树 - 力扣(LeetCode) 剑指 Offer II 053. 二…...

设计模式-结构型
设计模式-结构型 结构型设计模式包含:代理模式、适配器模式、桥接模式、装饰模式、外观设计模式、享元模式、组合模式 代理模式 核心是在具体的功能类与使用者之间建立一个中介类作为代理,使用者通过代理对象对真实的功能类进行访问。 在iOS开发中&am…...
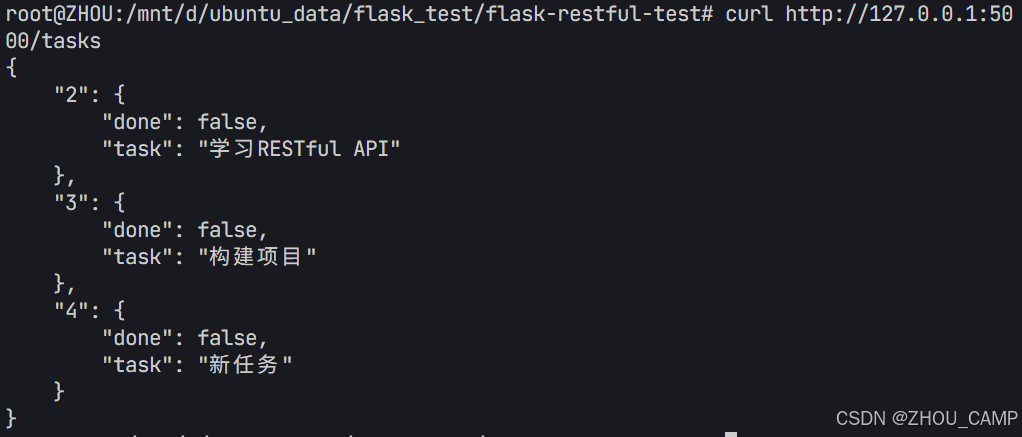
Flask RESTful 示例
目录 1. 环境准备2. 安装依赖3. 修改main.py4. 运行应用5. API使用示例获取所有任务获取单个任务创建新任务更新任务删除任务 中文乱码问题: 下面创建一个简单的Flask RESTful API示例。首先,我们需要创建环境,安装必要的依赖,然后…...
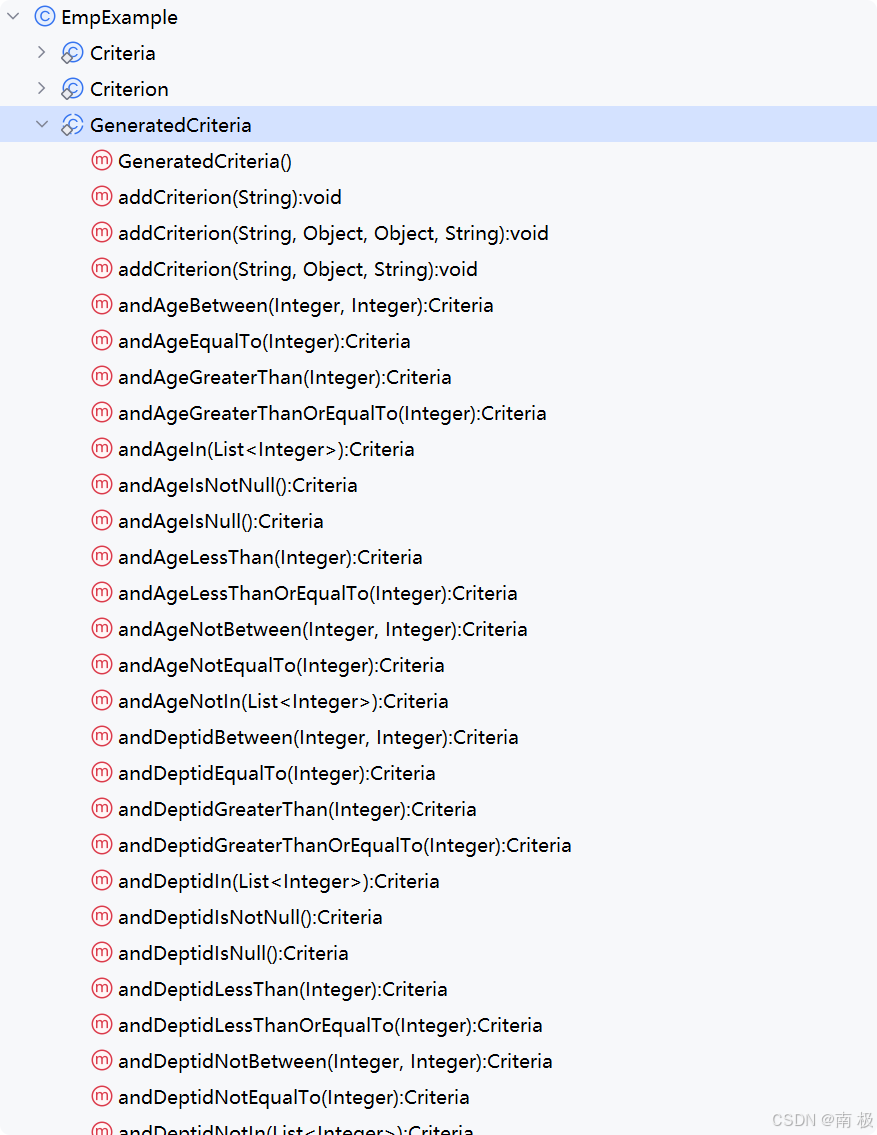
Mybatis逆向工程,动态创建实体类、条件扩展类、Mapper接口、Mapper.xml映射文件
今天呢,博主的学习进度也是步入了Java Mybatis 框架,目前正在逐步杨帆旗航。 那么接下来就给大家出一期有关 Mybatis 逆向工程的教学,希望能对大家有所帮助,也特别欢迎大家指点不足之处,小生很乐意接受正确的建议&…...

在四层代理中还原真实客户端ngx_stream_realip_module
一、模块原理与价值 PROXY Protocol 回溯 第三方负载均衡(如 HAProxy、AWS NLB、阿里 SLB)发起上游连接时,将真实客户端 IP/Port 写入 PROXY Protocol v1/v2 头。Stream 层接收到头部后,ngx_stream_realip_module 从中提取原始信息…...

【论文笔记】若干矿井粉尘检测算法概述
总的来说,传统机器学习、传统机器学习与深度学习的结合、LSTM等算法所需要的数据集来源于矿井传感器测量的粉尘浓度,通过建立回归模型来预测未来矿井的粉尘浓度。传统机器学习算法性能易受数据中极端值的影响。YOLO等计算机视觉算法所需要的数据集来源于…...

【JavaSE】绘图与事件入门学习笔记
-Java绘图坐标体系 坐标体系-介绍 坐标原点位于左上角,以像素为单位。 在Java坐标系中,第一个是x坐标,表示当前位置为水平方向,距离坐标原点x个像素;第二个是y坐标,表示当前位置为垂直方向,距离坐标原点y个像素。 坐标体系-像素 …...

ip子接口配置及删除
配置永久生效的子接口,2个IP 都可以登录你这一台服务器。重启不失效。 永久的 [应用] vi /etc/sysconfig/network-scripts/ifcfg-eth0修改文件内内容 TYPE"Ethernet" BOOTPROTO"none" NAME"eth0" DEVICE"eth0" ONBOOT&q…...

08. C#入门系列【类的基本概念】:开启编程世界的奇妙冒险
C#入门系列【类的基本概念】:开启编程世界的奇妙冒险 嘿,各位编程小白探险家!欢迎来到 C# 的奇幻大陆!今天咱们要深入探索这片大陆上至关重要的 “建筑”—— 类!别害怕,跟着我,保准让你轻松搞…...
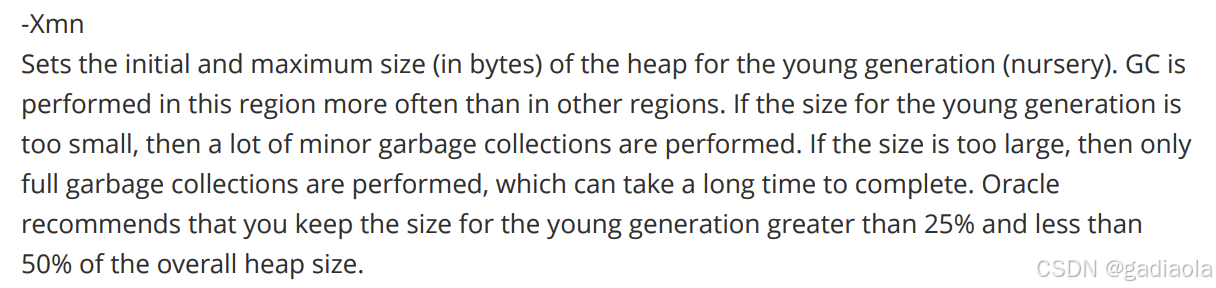
【JVM】Java虚拟机(二)——垃圾回收
目录 一、如何判断对象可以回收 (一)引用计数法 (二)可达性分析算法 二、垃圾回收算法 (一)标记清除 (二)标记整理 (三)复制 (四ÿ…...
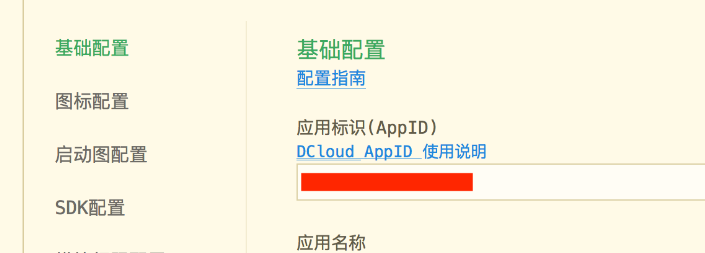
uniapp 开发ios, xcode 提交app store connect 和 testflight内测
uniapp 中配置 配置manifest 文档:manifest.json 应用配置 | uni-app官网 hbuilderx中本地打包 下载IOS最新SDK 开发环境 | uni小程序SDK hbulderx 版本号:4.66 对应的sdk版本 4.66 两者必须一致 本地打包的资源导入到SDK 导入资源 | uni小程序SDK …...

API网关Kong的鉴权与限流:高并发场景下的核心实践
🔥「炎码工坊」技术弹药已装填! 点击关注 → 解锁工业级干货【工具实测|项目避坑|源码燃烧指南】 引言 在微服务架构中,API网关承担着流量调度、安全防护和协议转换的核心职责。作为云原生时代的代表性网关,Kong凭借其插件化架构…...