【ROS仿真实战】获取机器人在gazebo位置真值的三种方法(三)
文章目录
- 前言
- 一. 使用ROS tf库
- 二、 使用Gazebo Model Plugin
- 三、 使用libgazebo_ros_p3d插件
- 四、总结
前言
在ROS和Gazebo中,获取机器人的位置信息通常通过ROS消息传递进行。在这篇文章中,我们将介绍三种获取机器人在Gazebo中位置真值的方法:使用ROS tf库、使用自己编写Gazebo Model Plugin以及libgazebo_ros_p3d Plugin。

一. 使用ROS tf库
ROS tf库是ROS中用于管理坐标变换的库,它可以通过ROS消息传递来管理不同坐标系之间的关系。在Gazebo中,每个模型都有一个本地坐标系(local coordinate system),这个坐标系的原点通常位于模型的重心。模型的本地坐标系可以通过SDF文件或URDF文件定义。在Gazebo中,机器人也是一个模型,因此可以通过ROS tf库来获取机器人的位置信息。
以下是获取机器人在Gazebo中位置信息的步骤:
- 在机器人控制程序中,通过tf监听器(tf listener)订阅tf变换消息(tf transform message)。
#include <ros/ros.h>
#include <tf/transform_listener.h>int main(int argc, char** argv) {ros::init(argc, argv, "robot_position");ros::NodeHandle nh;tf::TransformListener listener;while (ros::ok()) {tf::StampedTransform transform;try {listener.lookupTransform("world", "base_link", ros::Time(0), transform);} catch (tf::TransformException& ex) {ROS_ERROR("%s", ex.what());ros::Duration(1.0).sleep();continue;}double x = transform.getOrigin().x();double y = transform.getOrigin().y();double z = transform.getOrigin().z();ROS_INFO("Robot position: x=%f, y=%f, z=%f", x, y, z);ros::spinOnce();}return 0;
}
-
在lookupTransform函数中指定目标坐标系和源坐标系。在这个例子中,目标坐标系是"world",表示机器人在地图坐标系中的位置。源坐标系是"base_link",表示机器人本身的坐标系。
-
通过调用getOrigin函数获取机器人在目标坐标系中的位置。
需要注意的是,机器人控制程序中必须先启动tf监听器,否则程序会无法订阅到tf变换消息。
二、 使用Gazebo Model Plugin
另一种获取机器人在Gazebo中位置信息的方法是使用Gazebo Model Plugin。Gazebo Model Plugin是一种可以附加到Gazebo模型上的插件,可以在模拟过程中对模型进行控制和监测。
以下是使用Gazebo Model Plugin获取机器人在Gazebo中位置信息的步骤:
- 编写Gazebo Model Plugin
首先,我们需要编写一个Gazebo Model Plugin,用于订阅机器人在Gazebo中的位姿信息,并将其发布到ROS话题中。在这个例子中,我们使用的是Gazebo提供的ModelPlugin。
下面是一个简单的例子,演示如何获取机器人在Gazebo中的位置信息,并将其发布到ROS话题中:
#include <gazebo/common/Plugin.hh>
#include <gazebo/physics/physics.hh>
#include <ros/ros.h>
#include <geometry_msgs/PoseStamped.h>namespace gazebo {class RobotPlugin : public ModelPlugin {public:RobotPlugin() {}void Load(physics::ModelPtr _parent, sdf::ElementPtr _sdf) override {// 获取机器人模型model_ = _parent;// 初始化ROS节点ros::NodeHandle nh;// 创建一个ROS发布器,发布机器人的位置信息pose_pub_ = nh.advertise<geometry_msgs::PoseStamped>("/robot_pose", 10);// 创建一个Gazebo回调函数,用于在每个仿真步骤中获取机器人的位姿信息update_connection_ = gazebo::event::Events::ConnectWorldUpdateBegin(boost::bind(&RobotPlugin::OnUpdate, this));}private:void OnUpdate() {// 获取机器人的位姿信息auto pose = model_->WorldPose();// 将位姿信息转换为ROS消息类型geometry_msgs::PoseStamped pose_msg;pose_msg.header.frame_id = "world";pose_msg.header.stamp = ros::Time::now();pose_msg.pose.position.x = pose.Pos().X();pose_msg.pose.position.y = pose.Pos().Y();pose_msg.pose.position.z = pose.Pos().Z();pose_msg.pose.orientation.x = pose.Rot().X();pose_msg.pose.orientation.y = pose.Rot().Y();pose_msg.pose.orientation.z = pose.Rot().Z();pose_msg.pose.orientation.w = pose.Rot().W();// 发布机器人的位姿信息pose_pub_.publish(pose_msg);}// 机器人模型physics::ModelPtr model_;// ROS发布器,用于发布机器人的位置信息ros::Publisher pose_pub_;// Gazebo回调函数,用于在每个仿真步骤中获取机器人的位姿信息gazebo::event::ConnectionPtr update_connection_;
};GZ_REGISTER_MODEL_PLUGIN(RobotPlugin)} // namespace gazebo
- 编译和运行
编译上述代码,可以使用Catkin工作空间进行编译。在Catkin工作空间的根目录下,创建一个名为“src”的目录,然后将上述代码复制到“src”目录下。接下来,使用以下命令编译代码:
catkin_make
接下来,可以在.launch文件中添加gazebo_ros包,并启动Gazebo仿真环境,启动ROS节点:
<launch><arg name="model" default="robot"/><include file="$(find gazebo_ros)/launch/empty_world.launch"><arg name="world_name" value="$(find my_robot)/worlds/my_world.world"/><arg name="paused" value="false"/><arg name="use_sim_time" value="true"/><arg name="gui" value="true"/><arg name="headless" value="false"/><arg name="debug" value="false"/></include><node name="gazebo_model_publisher" pkg="my_robot" type="gazebo_model_publisher" output="screen"><param name="model" value="$(arg model)"/><param name="topic" value="/robot_pose"/></node>
</launch>
在上面的.launch文件中,首先包含了gazebo_ros包的empty_world.launch文件,并传递了相关参数,启动Gazebo仿真环境。然后,启动一个节点gazebo_model_publisher,这个节点是我们自己编写的Gazebo Model Plugin,通过订阅机器人的位置信息并将其发送到ROS话题中。
运行.launch文件:
roslaunch my_robot gazebo_model_publisher.launch
此时,机器人在Gazebo中的位置信息将会以ROS话题的形式发布,可以使用rostopic命令查看:
rostopic echo /robot_pose
这样,我们就可以通过Gazebo Model Plugin获取机器人在Gazebo中的位置信息了。
三、 使用libgazebo_ros_p3d插件
libgazebo_ros_p3d是一个用于在Gazebo仿真环境中发布三维位置和速度信息的ROS插件库。该插件可以使ROS节点通过ROS话题订阅机器人的三维位置和速度信息,并将其发布到Gazebo仿真环境中,使得机器人的运动可以在仿真环境中被准确地模拟和显示。
该插件通过Gazebo中的物理引擎模拟机器人的运动,并将模拟结果转换成ROS消息发布到ROS话题中。该插件可以很方便地与其他ROS节点和包进行集成,实现对机器人运动的控制和监控。
使用libgazebo_ros_p3d插件需要在Gazebo模型文件中添加插件的配置,并在ROS节点中订阅插件发布的ROS话题。插件配置中需要指定插件的名称、参考框架、更新频率等参数,以及要发布的三维位置和速度信息的名称和单位。
<!-- Fake localization plugin --><plugin name="ground_truth_odometry" filename="libgazebo_ros_p3d.so"><alwaysOn>true</alwaysOn><updateRate>100.0</updateRate><bodyName>base_link</bodyName><topicName>base_pose_ground_truth</topicName><gaussianNoise>0.01</gaussianNoise><frameName>map</frameName>--><!-- initialize odometry for fake localization--><xyzOffsets>0 0 0</xyzOffsets><rpyOffsets>0 0 0</rpyOffsets></plugin>
编写节点订阅话题/gazebo/model_states,找到对应模型的名称即可,例如机器人名称为turtlebot3。
void _modelStatesCallback(const gazebo_msgs::ModelStatesConstPtr &msg)
{int modelCount = msg->name.size();for(int modelInd = 0; modelInd < modelCount; ++modelInd){if(msg->name[modelInd] == "turtlebot3"){_current_pose.pose = msg->pose[modelInd];_current_velocity.twist = msg->twist[modelInd];break;}}
}
在ROS机器人算法开发和测试过程中,libgazebo_ros_p3d插件可以帮助开发人员在仿真环境中快速、准确地获取机器人的位置和速度信息,方便进行算法开发和测试。
四、总结
总的来说,在进行ROS机器人算法开发和测试时,获取机器人在Gazebo中位置信息的基本步骤是通过订阅ROS话题或使用插件提供的接口来获取机器人位置信息,并将其发送到ROS话题中。选择适合自己的方法,根据实际需求和问题进行调试和优化是非常重要的。无论使用哪种方法,这个基本步骤都是相同的,只是具体实现方式会有所不同。因此,在使用Gazebo进行ROS机器人算法开发和测试时,需要根据实际情况选择合适的方法来获取机器人的位置信息。
相关文章:
【ROS仿真实战】获取机器人在gazebo位置真值的三种方法(三)
文章目录 前言一. 使用ROS tf库二、 使用Gazebo Model Plugin三、 使用libgazebo_ros_p3d插件四、总结 前言 在ROS和Gazebo中,获取机器人的位置信息通常通过ROS消息传递进行。在这篇文章中,我们将介绍三种获取机器人在Gazebo中位置真值的方法࿱…...
——FontDialog(史上最全))
Winform从入门到精通(35)——FontDialog(史上最全)
文章目录 前言一、属性1、Name2、AllowScriptChange3、AllowSimulations4、AllowVectorFonts5、AllowVerticalFonts6、Color7、FixedPitchOnly8、Font9、FontMustExist10、MaxSize11、MinSize12、 ScriptsOnly13、ShowApply14、ShowColor15、ShowEffects16、ShowHelp...

AcWing 854. Floyd求最短路Floyd模板
Floyd算法: 标准弗洛伊德算法,三重循环,基于动态规划。 循环结束之后 d[i][j]存储的就是点 i 到点 j 的最短距离。 需要注意循环顺序不能变:第一层枚举中间点,第二层和第三层枚举起点和终点。 特点: 1.复杂…...
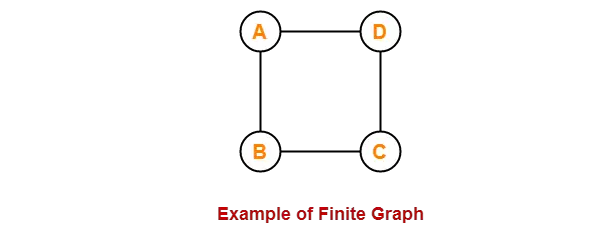
Graph Theory(图论)
一、图的定义 图是通过一组边相互连接的顶点的集合。 In this graph, V { A , B , C , D , E } E { AB , AC , BD , CD , DE } 二、图的类型 2.1 Finite Graph A graph consisting of finite number of vertices and edges is called as a finite graph. Null Graph Tri…...

[Python]生成 txt 文件
前段时间有位客户问: 你们的程序能不能给我们生成个 txt 文件,把新增的员工都放进来,字段也不需要太多,就要 员工姓名/卡号/员工编号/员工职位/公司 这些字段就行了,然后我们的程序会去读取这个 txt 文件,拿里面的内容,读完之后会这个文件删掉 我: 可以接受延迟吗?可能没办法实…...

GeoTools实战指南: 自定义矢量样式并生成截图
GeoTools实战指南: 自定义矢量样式并生成截图 介绍 本段代码的主要功能是将矢量数据(Shapefile)渲染成一张图片。 准备环境 首先,您需要将GeoTools库添加到您的项目中。使用Maven或Gradle添加依赖项,或者直接下载GeoTools的jar文件并添加到您的类路径中。 Maven <…...

深度学习超参数调整介绍
文章目录 深度学习超参数调整介绍1. 学习率2. 批大小3. 迭代次数4. 正则化5. 网络结构总结 深度学习超参数调整介绍 深度学习模型的性能很大程度上取决于超参数的选择。超参数是指在训练过程中需要手动设置的参数,例如学习率、批大小、迭代次数、网络结构等等。选择…...
Bootloader
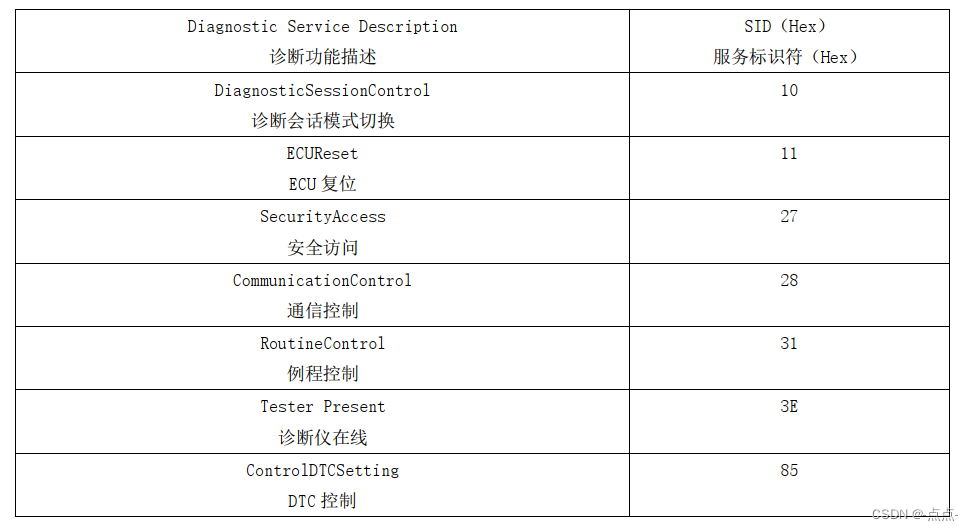
本篇不作太过的技术了解,仅可作为初学者的参考。用嘴简单的语言讲清楚一件事。 项目中遇到Bootloader升级MCU,我很好这是什么软件,逻辑是什么,怎么升级的。 术语及定义 指纹信息fingerprint诊断仪用于标识特定的下载尝试的信息 …...

安卓开发_广播机制_广播的最佳实践:实现强制下线功能
安卓开发_广播机制_广播的最佳实践:实现强制下线功能 ActivityCollector类用于管理所有的ActivityBaseActivity类作为所有Activity的父类创建一个LoginActivity来作为登录界面布局LoginActivity 在MainActivity中加入强制下线功能布局MainActivity在BaseActivity中注…...
国民技术N32G430开发笔记(10)- IAP升级 Application 的制作
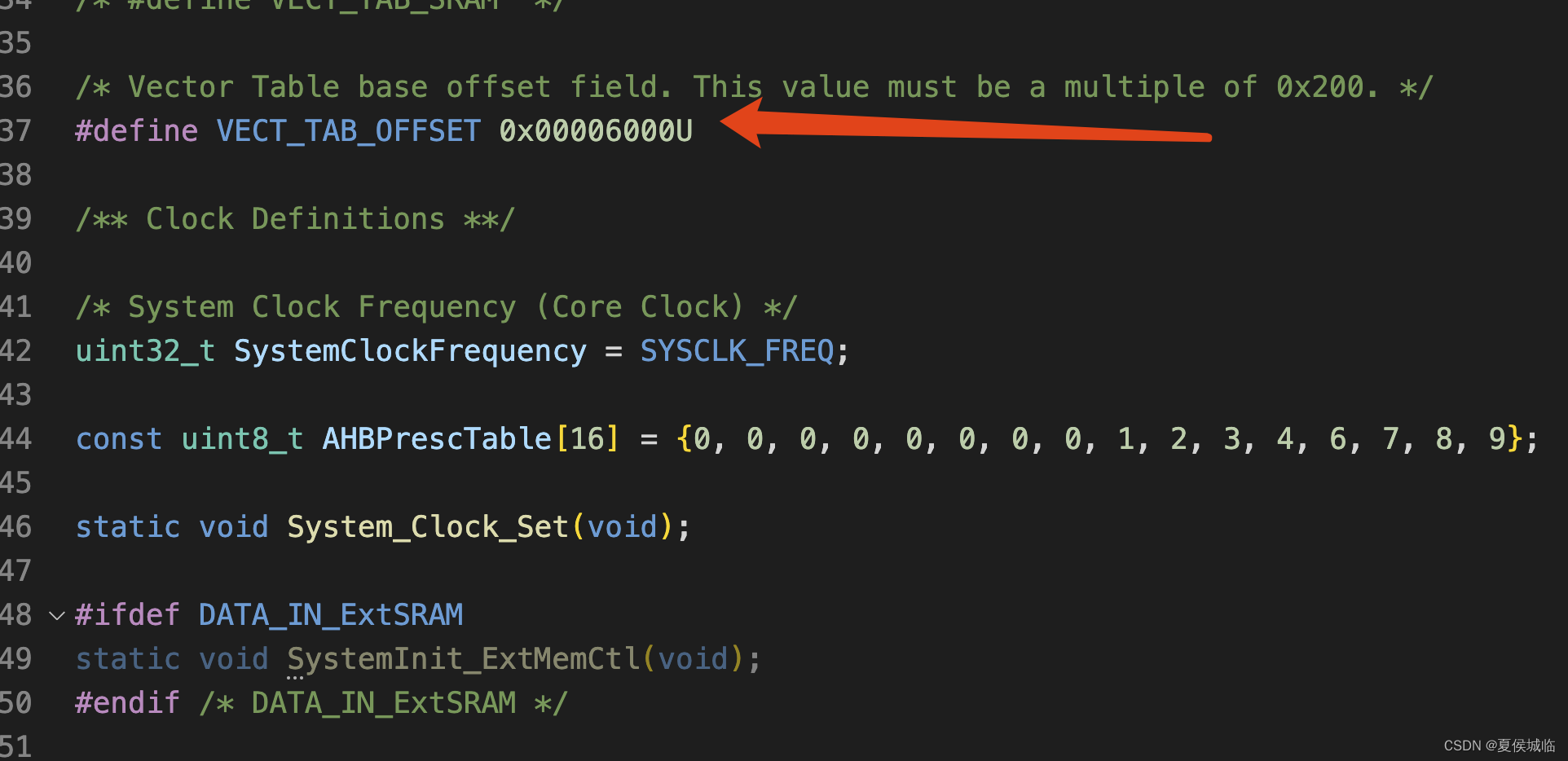
IAP升级 Application 的制作 1、App程序跟Bootloader程序最大的区别就是, 程序的执行地址变成了之前flash设定的0x08006000处, 大小限制为20KB 所以修改Application工程的ld文件 origin 改成 0x08006000 length 改成0x5000 烧录是起始地址也要改为x0x…...
[计算机图形学]材质与外观(前瞻预习/复习回顾)
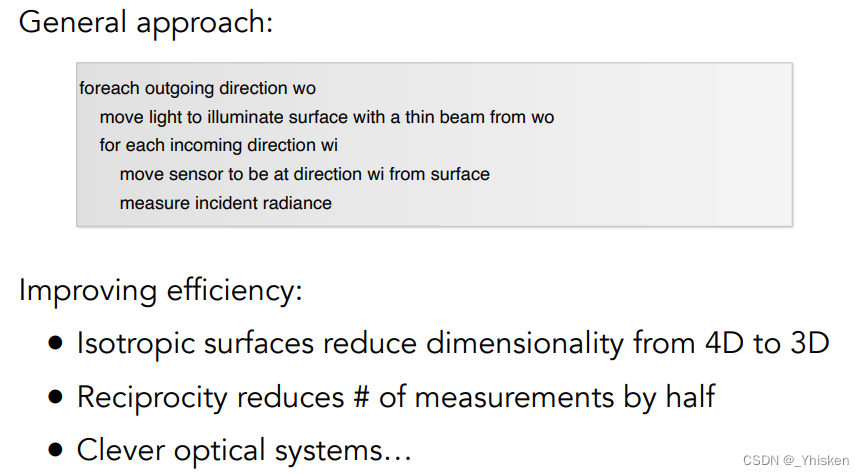
一、图形学中的材质 不同的物体表面有着不同的材质,而不同的材质意味着它们与光线的作用不同。那么我们之前在介绍辐射度量学和渲染方程提到过其中一个函数,叫做BRDF,而在实际上,也就是BRDF定义了不同的材质。BRDF决定了光如何被反…...
Java 的简要介绍及开发环境的搭建(超级详细)
图片来源于互联网 目录 | CONTENT Java 简介 一、什么是 Java 二、认识 Java 版本 三、选择哪个版本比较好 搭建 Java 开发环境 一、下载 Java 软件开发工具包 JDK 二、配置环境变量 自动配置 手动配置 三、下载合适的 IDE IntelliJ IDEA Visual Studio Code Eclip…...

每天一道算法练习题--Day15 第一章 --算法专题 --- -----------二叉树的遍历
概述 二叉树作为一个基础的数据结构,遍历算法作为一个基础的算法,两者结合当然是经典的组合了。很多题目都会有 ta 的身影,有直接问二叉树的遍历的,有间接问的。比如要你找到树中满足条件的节点,就是间接考察树的遍历…...

golang - 函数的使用
核心化编程 为什么需要函数? 代码冗余问题不利于代码维护函数可以解决这个问题 函数 函数:为完成某一功能的程序指令(语句)的集合,称为函数 在 Go 中,函数分为:自定义函数(自己写…...

真题详解(极限编程)-软件设计(六十一)
真题详解(二分查找平均值)-软件设计(六十)https://blog.csdn.net/ke1ying/article/details/130417464 VLANtag属于 数据链路层实现。 数据链路层:网桥交换机。 网络层:路由器。 物理层:中继器。 Telent…...

计算机网络笔记:TCP粘包
默认情况下, TCP 连接会启⽤延迟传送算法 (Nagle 算法), 在数据发送之前缓存他们. 如果短时间有多个数据发送, 会缓冲到⼀起作⼀次发送 , 这样可以减少 IO 消耗提⾼性能。 如果是传输⽂件的话, 那么根本不⽤处理粘包的问题, 来⼀个包拼⼀个包就好了。但是如果是多条消息, 或者…...

Vue(标签属性:ref、配置项:props、混入mixin、插件、样式属性:scroped)
一、ref(打标识) 前面提及到了标签属性:keys 这里将了解ref:打标识 正常布置脚手架并创建入口文件main.js,引入组件 1. 可以给元素注册引用信息(获取真实DOM) 给一个按钮获取上方的dom的方法,方…...
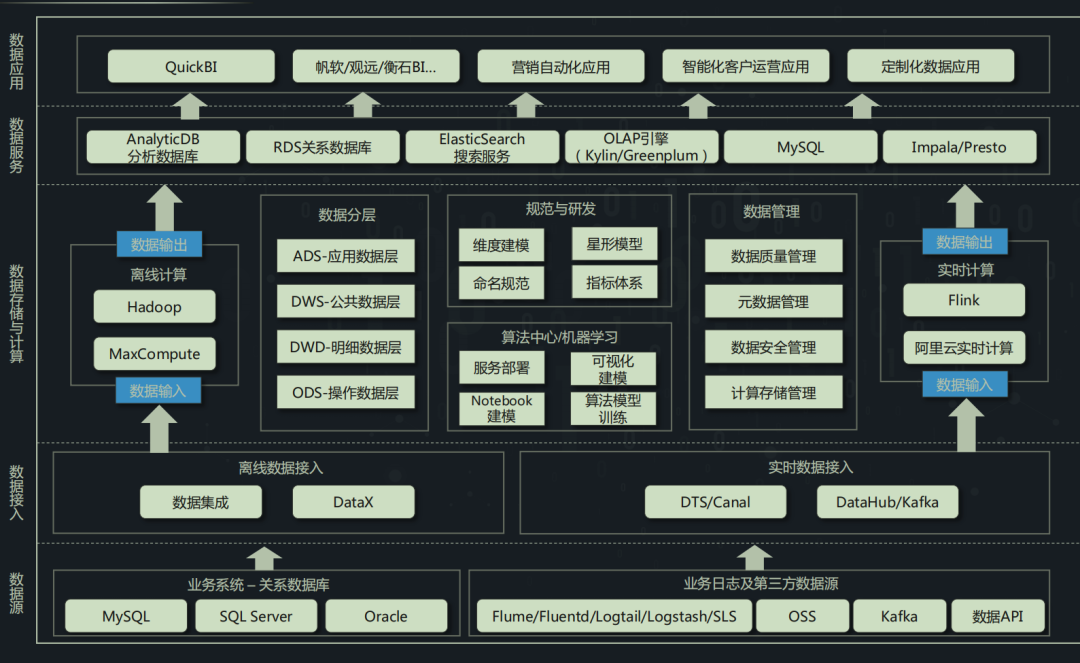
数仓建设规划核心问题!
小A进入一家网约车出现服务公司,负责公司数仓建设,试用期主要一项 OKR是制定数据仓库建设规划;因此小 A 本着从问题出发为原点,先对公司数仓现状进行一轮深入了解,理清存在问题,然后在以不忘初心原则提出解…...

容器镜像的导入导出
容器镜像的导入导出 第1关:导入导出容器 任务描述 本关任务是学习导入导出容器,要求学习者参照示例完成将busyboxContainer容器的文件系统保存为一个tar包,通过该tar包导入一个busybox:v1.0镜像。 相关知识 将 "容器的文件系统&…...

Java每日一练(20230502)
目录 1. 二叉搜索树的最近公共祖先 🌟🌟 2. 随机分组问题 🌟 3. K 个一组翻转链表 🌟🌟🌟 🌟 每日一练刷题专栏 🌟 Golang每日一练 专栏 Python每日一练 专栏 C/C每日一练…...

Spring_couplet_generation 模型背后的神经网络:从LSTM到现代架构
Spring_couplet_generation 模型背后的神经网络:从LSTM到现代架构 你有没有想过,当你输入一句“春风送暖”,AI就能对出“福气临门”这样工整的下联,它到底是怎么做到的?这背后,是一系列神经网络在默默工作…...

5分钟搞定图像分类:通用物体识别ResNet18镜像实战体验
5分钟搞定图像分类:通用物体识别ResNet18镜像实战体验 1. 镜像核心能力速览 今天要介绍的「通用物体识别-ResNet18」镜像,是一个开箱即用的图像分类解决方案。基于PyTorch官方TorchVision库构建,它集成了经典的ResNet-18模型,能…...

office卸载工具教程!微软官方office卸载工具,怎么解决office卸载不干净怎么弄?Office2021家庭和学生版卸载不干净怎么办?
简介 今天介绍微软官方office卸载工具SetupProd_OffScrub,用这个卸载后直接重装就可以了! 这款由微软官方提供的SetupProd OffScrub工具,是重装Office前的最佳助手。它能一键清除电脑中顽固的Office残留数据,为你提供一个干净的安…...
)
51单片机控制8×8点阵显示汉字(上下左右滚动)
一、项目概述 本项目使用51单片机(如STC89C52)控制88 LED点阵,实现汉字的显示和上下左右滚动效果。通过动态扫描技术和字模数据管理,实现"中"、"国"等汉字的平滑滚动显示。 二、系统硬件设计 1. 硬件连接 ---…...
)
光伏系统设计避坑指南:用pvlib快速验证双面组件发电增益(附对比实验代码)
光伏系统设计避坑指南:用pvlib快速验证双面组件发电增益(附对比实验代码) 在光伏系统设计领域,双面组件正逐渐成为行业新宠。与传统单面组件相比,双面组件能够同时利用正面和背面的入射光,理论上可提升5%-3…...

GoGoBright库深度解析:KidBright平台ESP32硬件控制实践指南
1. LILCMU GoGoBright 库深度解析:面向 KidBright 平台的硬件功能扩展实践指南1.1 项目定位与工程价值LILCMU GoGoBright Library 是专为泰国教育级嵌入式开发平台 KidBright 设计的硬件抽象层(HAL)扩展库。KidBright 基于 ESP32-WROOM-32 模…...

GLM-4-9B-Chat-1M模型快速部署:vLLM加速推理与Chainlit前端调用详解
GLM-4-9B-Chat-1M模型快速部署:vLLM加速推理与Chainlit前端调用详解 1. 模型简介与核心能力 GLM-4-9B-Chat-1M是智谱AI推出的最新一代开源对话模型,基于GLM-4架构开发,具备以下核心能力: 超长上下文支持:支持1M&…...

NET 11 Preview 2 到底带来了啥
这次 .NET 11 Preview 2,如果只看表面,其实没什么特别炸裂的新 API。但如果你仔细看,会发现它做了一件更重要的事情:在底层、性能和工程体验上做了一轮系统性的优化。简单说,这一版不是让你“写更多新东西”࿰…...
)
用PID运算放大电路改造你的Arduino温控项目(附电路图下载)
用PID运算放大电路改造你的Arduino温控项目(附电路图下载) 在创客和物联网开发领域,温度控制是一个经久不衰的热门话题。从3D打印机热床到恒温培养箱,从智能温室到咖啡机温控系统,精准的温度控制往往是项目成败的关键…...

STM32与OLED屏幕的I2C驱动开发实战
1. OLED屏幕驱动基础原理 第一次接触OLED屏幕时,我完全被它那鲜艳的色彩和超高的对比度震撼到了。这种自发光的显示技术,和我们常见的LCD屏完全不同。想象一下,OLED屏幕就像是由无数个微型灯泡组成的阵列,每个"灯泡"&am…...