(二)【平衡小车制作】电机驱动(超详解)
一、硬件设计
1.直流减速电机
直流减速电机,即齿轮减速电机,是在普通直流电机的基础上,加上配套齿轮减速箱。齿轮减速箱的作用是,提供较低的转速,较大的力矩。
简单的来说,STM32分配两个IO口给一个直流减速电机,并给予高低电平,来使得电机进行正转或反转。

我用的电机为GM25-370直流减速电机(带霍尔编码器),工作电压:6-24VDC,额定电压12V,额定电流0.65A,空载转速350RPM,额定功率5W,最大精度,1496CPR,配备 CPR霍尔AB两相编码器,减速后输出单圈374个正交脉冲。
2.TB6612FNG电机驱动芯片
要实现小车的转向与前进后退控制,我们可以使用STM32实现,但是STM32的IO口带负载能力较弱,而直流电机是大电流感性负载,所以我们需要功率放大器件,在这里,我选择使用TB6612FNG这款电机驱动芯片。
TB6612FNG 是东芝半导体公司生产的一款直流电机驱动器件,它具有大电流MOSFET-H 桥结构,双通道电路输出,可同时驱动 2 个电机。相比于 L298N的热耗性和外围二极管续流电路,TB6612FNG无需外加散热片,外围电路简单,只需外接电源滤波电容就可以直接驱动电机,利于减小系统尺寸。对于PWM信号输入频率范围,我采用10KHz的频率,并通过改变占空比调节电机的速度。
平衡小车中使用到的引脚:
电机1——PB12/PB13
电机2——PB14/PB15
PWM1——PA8
PWM2——PA11


3.H桥驱动电路
上面说到TB6612FNG 具有大电流MOSFET-H桥结构,那么很多小伙伴想问:什么是H桥结构呢?我以下面两张图举例,帮助大家简单化理解H桥电路结构。
注:图中的电路Q1,Q2,Q3,Q4为三极管,而TB6612内部集成的是四个MOSFET,我以下图举例,大家不可把下图看做是TB6612内部电路,其内部电路可查看TB6612的参考手册。
① 当Q1,Q4导通,Q2,Q3关断时,电流从Q1,从电机正极通过电机负极,再从Q4流出,完成一条回路,电机Motor正转。

① 当Q2,Q3导通,Q1,Q4关断时,电流从Q3,从电机负极通过电机正极,再从Q2流出,完成一条回路,电机Motor反转。

二、软件编程
1.电机驱动函数——motor.c
1)电机GPIO初始化函数
入口参数:无
- 初始化GPIO–PB12、PB13、PB14、PB15为推挽输出
void Motor_Init(void)
{GPIO_InitTypeDef GPIO_InitStruct;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);// 开启时钟GPIO_InitStruct.GPIO_Mode=GPIO_Mode_Out_PP;// 初始化GPIO--PB12、PB13、PB14、PB15为推挽输出GPIO_InitStruct.GPIO_Pin=GPIO_Pin_12 | GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15;GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOB,&GPIO_InitStruct);
}
2)限幅函数
入口参数:电机A脉冲个数,电机B脉冲个数
- 限制电机的脉冲个数在规定范围内,有个最值,即自动重装载值(我设置的是PWM_MAX = 7200,PWM_MIN = -7200)
void Limit(int *motoA,int *motoB)
{if(*motoA>PWM_MAX)*motoA=PWM_MAX;if(*motoA<PWM_MIN)*motoA=PWM_MIN;if(*motoB>PWM_MAX)*motoB=PWM_MAX;if(*motoB<PWM_MIN)*motoB=PWM_MIN;
}
3)绝对值函数(非常通用,建议保存!!)
入口参数:常规变量
- 通过与0比较,大于0则返回不变的值,小于0则返回相反的值。
int abs(int p)
{int q;q=p>0?p:(-p);return q;
}
4)赋值函数
入口参数:电机A脉冲个数,电机B脉冲个数
- 入口参数即为PID运算完成后的最终PWM值(后续会讲解PID算法的实现)
void Load(int moto1,int moto2)
{//1.研究正负号,对应正反转if(moto1>0) Ain1=1,Ain2=0;//正转else Ain1=0,Ain2=1;//反转//2.研究PWM值TIM_SetCompare1(TIM1,abs(moto1));//1.研究正负号,对应正反转if(moto2>0)Bin1=1,Bin2=0;else Bin1=0,Bin2=1; //2.研究PWM值TIM_SetCompare4(TIM1,abs(moto2));
}
2.电机驱动函数头文件——motor.h
#ifndef _MOTOR_H
#define _MOTOR_H#include "sys.h" #define Ain1 PBout(14)
#define Ain2 PBout(15)#define Bin1 PBout(13)
#define Bin2 PBout(12)void Motor_Init(void);
void Limit(int *motoA,int *motoB);
int abs(int p);
void Load(int moto1,int moto2);
#endif
3.PWM函数——pwm.c
1. 定时器初始化函数
入口参数:预分频值,自动重装载值
- PA8,PA11复用推挽输出
- 对应定时器1通道1和通道4
- 开启MOE主输出使能(高级定时器特有!!!)
void PWM_Init_TIM1(u16 Psc,u16 Per)
{GPIO_InitTypeDef GPIO_InitStruct;TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;TIM_OCInitTypeDef TIM_OCInitStruct;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_TIM1 | RCC_APB2Periph_AFIO,ENABLE);//开启时钟GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP; // 初始化GPIO--PA8、PA11为复用推挽输出GPIO_InitStruct.GPIO_Pin=GPIO_Pin_8 | GPIO_Pin_11;GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStruct);TIM_TimeBaseStructInit(&TIM_TimeBaseInitStruct); // 初始化定时器。TIM_TimeBaseInitStruct.TIM_ClockDivision=TIM_CKD_DIV1;TIM_TimeBaseInitStruct.TIM_CounterMode=TIM_CounterMode_Up;TIM_TimeBaseInitStruct.TIM_Period=Per;TIM_TimeBaseInitStruct.TIM_Prescaler=Psc;TIM_TimeBaseInit(TIM1,&TIM_TimeBaseInitStruct); // TIM1TIM_OCInitStruct.TIM_OCMode=TIM_OCMode_PWM1; // 初始化输出比较TIM_OCInitStruct.TIM_OCPolarity=TIM_OCPolarity_High;TIM_OCInitStruct.TIM_OutputState=TIM_OutputState_Enable;TIM_OCInitStruct.TIM_Pulse=0;TIM_OC1Init(TIM1,&TIM_OCInitStruct);TIM_OC4Init(TIM1,&TIM_OCInitStruct);TIM_CtrlPWMOutputs(TIM1,ENABLE);// 高级定时器专属!!!--MOE主输出使能TIM_OC1PreloadConfig(TIM1,TIM_OCPreload_Enable);// OC1预装载寄存器使能TIM_OC4PreloadConfig(TIM1,TIM_OCPreload_Enable);// OC4预装载寄存器使能TIM_ARRPreloadConfig(TIM1,ENABLE);// TIM1在ARR上预装载寄存器使能TIM_Cmd(TIM1,ENABLE); // 开定时器。
}
4.PWM函数头文件——pwm.h
#ifndef _PWM_H
#define _PWM_H#include "sys.h" void PWM_Init_TIM1(u16 Psc,u16 Per);
#endif以上就是平衡小车系列文章第二讲——电机驱动,包括硬件结构讲解和STM32软件编程的讲解,文章中出现错误或者小伙伴对以上内容有所疑问,欢迎大家在评论区留言,小政看到后会尽快回复大家!
相关文章:
(二)【平衡小车制作】电机驱动(超详解)
一、硬件设计 1.直流减速电机 直流减速电机,即齿轮减速电机,是在普通直流电机的基础上,加上配套齿轮减速箱。齿轮减速箱的作用是,提供较低的转速,较大的力矩。 简单的来说,STM32分配两个IO口给一个…...

快速了解车联网V2X通信
自动驾驶拥有极其巨大的潜力,有可能改变我们的出行方式。它不仅有望永远改变车辆的设计和制造,还会永远改变汽车的所有权乃至整个交通运输业务。要实现全自动驾驶的目标,开发人员需要开发极为复杂的软件,软件中融入的人工智能(AI)…...

「Codeforces」D. Infinite Set
D. Infinite Set https://codeforces.com/contest/1635/problem/D 题目描述 你有一个由不同正整数组成的数组和一个无限集 S,现在你需要往集合 S 中塞入所有符合 x x x 条件的数。 x x x 的条件(满足其中任意一个即可): x a i …...
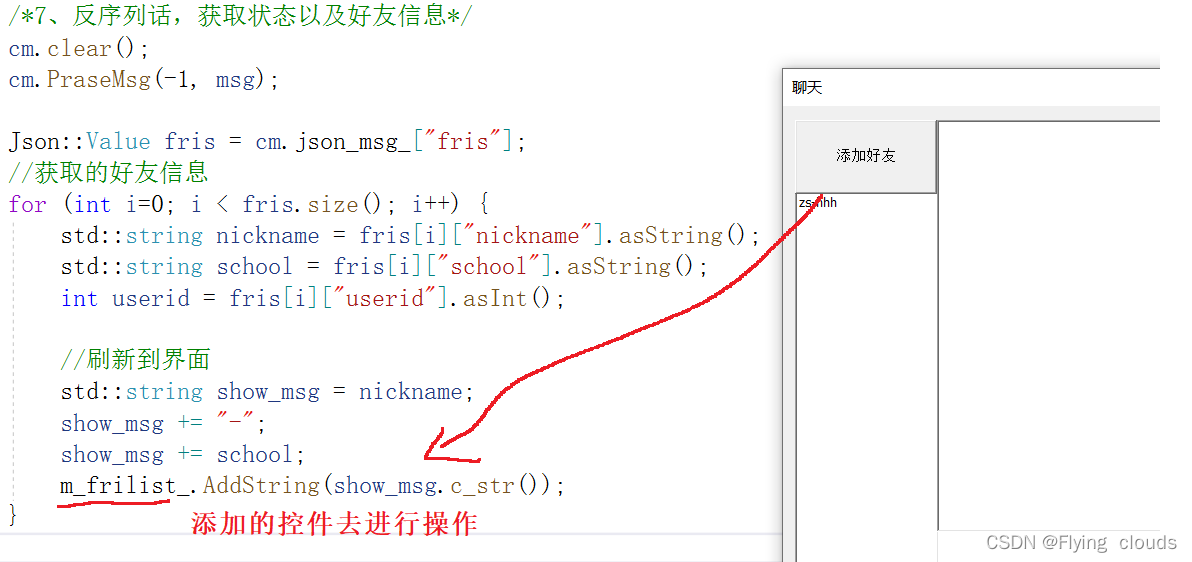
项目---基于TCP的高并发聊天系统
目录 服务端 服务端视角下的流程图 一、数据库管理模块 1.1 数据库表的创建 1.2 .对于数据库的操作 1.2.1首先得连接数据库 1.2.2执行数据库语句 1.2.3 返回数据库中存放的所有用户的信息 1.2.4返回数据库中存放的所有用户的好友信息 二、用户管理模块 2.1、UserInfo类&…...

iOS热更新-8种实现方式
一、JSPatch 热更新时,从服务器拉去js脚本。理论上可以修改和新建所有的模块,但是不建议这样做。 建议 用来做紧急的小需求和 修复严重的线上bug。 二、lua脚本 比如: wax。热更新时,从服务器拉去lua脚本。游戏开发经常用到。…...

R语言 | 编写自己的函数
目录 一、正式编写程序 二、设计第一个函数 三、函数也是一个对象 四、程序代码的简化 五、return()函数的功能 六、省略函数的大括号 七、传递多个参数函数的应用 7.1 设计可传递2个参数的函数 7.2 函数参数的默认值 7.3 3点参数“…”的使用 八、函数也可以作为参数 …...
【Java校招面试】基础知识(七)——数据库
目录 前言一、数据库索引二、数据库锁三、数据库事务四、数据库连接池后记 前言 本篇主要介绍数据库的相关内容。 “基础知识”是本专栏的第一个部分,本篇博文是第六篇博文,如有需要,可: 点击这里,返回本专栏的索引文…...

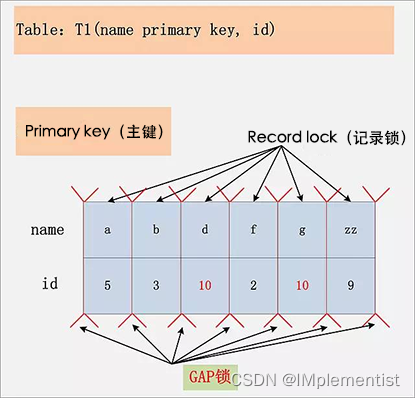
MySQL高级--锁
一、锁 锁是计算机协调多个进程或线程并发访问某一资源的机制。在数据库中,除传统的计算资源(CPU、RAM、I/O)的争用以外,数据也是一种供许多用户共享的资源。如何保证数据并发访问的一致性、有效性是所有数据库必须解决的一个问题…...

Maven(六):Maven的使用——继承与聚合
Maven(六):Maven的使用——继承与聚合 前言一、实验九:继承1、概念2、作用3、举例4、操作4.1 创建父工程4.2 创建模块工程4.3 查看被添加新内容的父工程 pom.xml4.4 解读子工程的pom.xml4.5 在父工程中配置依赖的统一管理4.6 子工…...
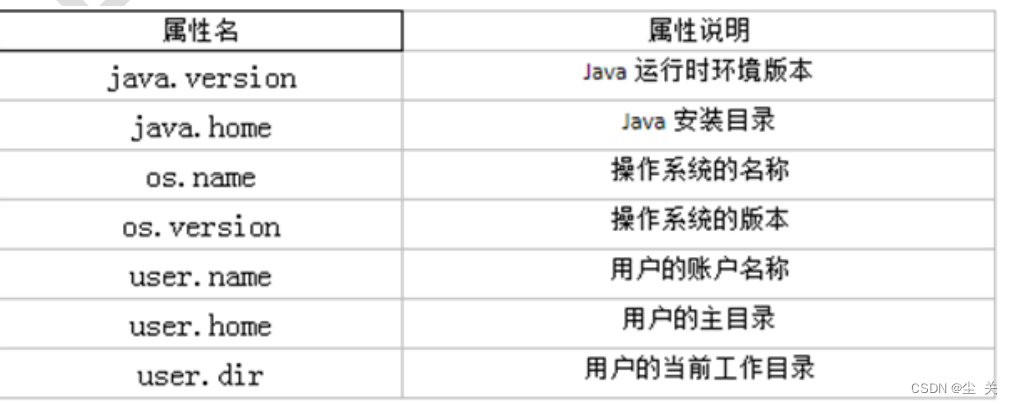
Java ---System类
System 类位于 java.lang 包,代表当前 Java 程序的运行平台,系统级的很多属性和控制方法都放置在该类的内部。由于该类的构造方法是 private 的,所以无法创建该类的对象,也就是无法实例化该类。 System 类提供了一些类变量和类方…...

代码随想录_贪心_leetcode 406 452
leetcode 406. 根据身高重建队列 406. 根据身高重建队列 假设有打乱顺序的一群人站成一个队列,数组 people 表示队列中一些人的属性(不一定按顺序)。每个 people[i] [hi, ki] 表示第 i 个人的身高为 hi ,前面 正好 有 ki 个身高…...

C++类的静态成员详解:成员函数非静态成员函数的非法调用
在C中,静态成员是属于整个类的而不是某个对象,静态成员变量只存储一份供所有对象共用。所以在所有对象中都可以共享它。使用静态成员变量实现多个对象之间的数据共享不会破坏隐藏的原则,保证了安全性还可以节省内存。 静态成员的定义或声明要…...

Qt之滑动条和进度条(QSlider、QProgressBar)
文章目录 前言一、QSliderQSlider的常用API信号与槽 二、QProgressBar滑动条和滚动条的常用API 总结 前言 在用户界面设计中,滑动条和进度条是常见的控件。Qt中提供了QProgressBar和QSlider两个类来实现滚动条和滑动条。 一、QSlider 在Qt中,QSlider是…...
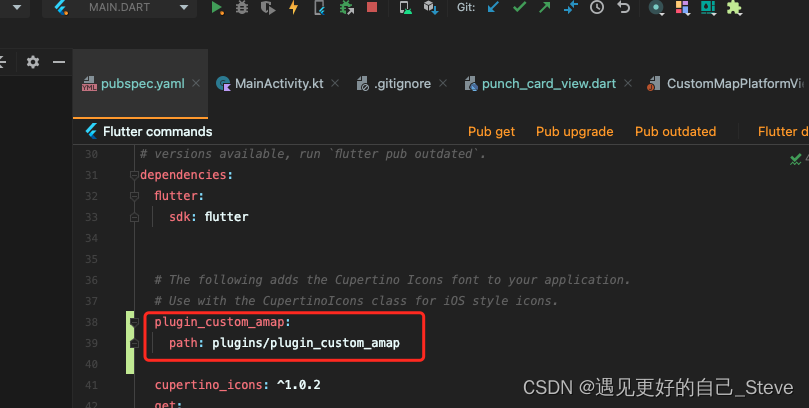
Flutter之插件开发plugin
目的:适用于独立业务模块,或者与原生页面交互频繁的地方。 基于flutter3.x , IDE :androidStudio demo:https://download.csdn.net/download/SHTLoveXX/87751845 步骤: 1.新建flutter project 【New flutter project】. 2. 在新建工程面板记得切换 …...
asp.net基于web的音乐管理网站dzkf17A9程序
本系统主要包含了等系统用户管理、公告信息管理、音乐资讯管理、音乐类型管理多个功能模块。下面分别简单阐述一下这几个功能模块需求。 管理员的登录模块:管理员登录系统对本系统其他管理模块进行管理。 用户的登录模块:用户登录本系统,对个…...

itop-3568开发板驱动学习笔记(25)设备树(四)GPIO 实例分析
《【北京迅为】itop-3568开发板驱动开发指南.pdf》 学习笔记 文章目录 GPIO 控制器必要属性其他属性 指定 GPIO 引脚 和时钟类似,GPIO 在设备树中也存在两层定义,首先是 GPIO 控制器,这部分由芯片原厂工程师编写,相当于 GPIO 底层…...
)
函数(定义、返回值、调用、参数)
目录 ❤ 无参函数 ❤ 有参函数 ❤ 空函数 ❤ 什么是返回值? ❤ 为什么要有返回值? ❤ 什么是函数调用? ❤ 为何用调用函数? ❤ 函数调用的三种形式 ❤ 形参和实参 形参 实参 ❤ 位置参数 位置形参 位置实…...

28. Kubernetes 核心组件讲解——API Server
本章讲解知识点 Kubernetes API Server 概述etcd 简介API Server 架构解析API Server 的 List-Watch 机制独特的 Kubernetes Proxy API 接口集群功能模板之间的通信1. Kubernetes API Server 概述 1.1 基本概念 Kubernetes API Server(API Server)是 Kubernetes 的核心组件…...

springboot框架开发医院云HIS 住院医生站、住院护士站功能实现
住院医生站主模块:包括医嘱管理、病案首页、分配入科、住院清单、我的质控等子模块 (1)医嘱管理功能简介 ①住院患者开立医嘱、支持医嘱复制、停止、作废等操作; ②医嘱类型含药品、项目、材料、嘱托; ③支持住院各…...

高性能定时器介绍及代码逐行解析--时间堆
简介 在《Linux高性能服务器编程》中,介绍了三种定时方法: socket选项SO_RCVTIMEO和SO_SNDTIMEOSIGALRM信号I/O复用系统调用的超时参数 基础知识 非活跃,是指客户端(这里是浏览器)与服务器端建立连接后,…...

Windows系统下安装与配置FreeSWITCH完整指南
本文提供在 Windows 系统上安装 FreeSWITCH 的完整步骤,涵盖下载、安装、配置、启动测试,以及可能遇到问题的解决方案,帮助你顺利完成开发环境的搭建。 一、环境准备与下载 1.1 系统要求 项目要求操作系统Windows 7/8/10/11,Wi…...

Java开发者晋升指南:集成Phi-3-vision构建AI面试题库与评估系统
Java开发者晋升指南:集成Phi-3-vision构建AI面试题库与评估系统 1. 技术招聘的痛点与AI解决方案 技术面试官每天面临重复性劳动:根据JD设计题目、评估代码、写反馈。传统方式存在三大痛点: 题库更新慢:技术栈迭代快,…...
)
抖音弹幕协议逆向实战:手把手解析Protobuf数据流(附Python代码)
抖音直播弹幕协议解析实战:从Protobuf到可读数据的完整链路 当直播间里飘过一条"老板大气"的弹幕时,你可能不知道这条简单的文字背后经历了怎样的技术旅程。作为开发者,我们看到的不是屏幕上那些花花绿绿的文字,而是一串…...

4G Cat.1内网穿透技术实现与优化
基于4G Cat.1的内网穿透技术实现1. 项目概述1.1 系统架构本项目实现了一个基于4G Cat.1通信模块的内网穿透解决方案,通过公网服务器中转,建立开发板与内网PC之间的TCP通信链路。系统由以下三个主要部分组成:4G终端设备:搭载Cat.1通…...
在DE2-115上5分钟搭个LED控制器)
别再手写Verilog了!用Intel Platform Designer(Qsys)在DE2-115上5分钟搭个LED控制器
图形化革命:5分钟用Platform Designer构建FPGA系统的实战指南 从代码到模块化思维的转变 在传统FPGA开发中,工程师往往需要从零开始编写Verilog代码,即使是简单的LED控制逻辑也不例外。这种开发方式不仅效率低下,而且容易出错——…...

NaViL-9B效果对比图:同一图片下temperature=0与0.5响应差异
NaViL-9B效果对比图:同一图片下temperature0与0.5响应差异 1. 模型简介 NaViL-9B是由专业研究机构开发的原生多模态大语言模型,具备强大的文本理解和图像分析能力。该模型支持纯文本问答和图片理解两种主要功能,能够处理复杂的多模态任务。…...
Stable Diffusion像素艺术工作流:Pixel Fashion Atelier预设Prompt指令集详解
Stable Diffusion像素艺术工作流:Pixel Fashion Atelier预设Prompt指令集详解 1. 像素艺术创作新体验 Pixel Fashion Atelier为设计师和艺术创作者带来了一种全新的像素艺术创作方式。这个基于Stable Diffusion与Anything-v5的工作站,将复古日系RPG的视…...

MusePublic低配适配教程:16G显存降级方案与效果妥协平衡点
MusePublic低配适配教程:16G显存降级方案与效果妥协平衡点 1. 项目简介 MusePublic是一款专门为艺术感时尚人像创作设计的轻量化文本生成图像系统。这个项目的核心基于MusePublic专属大模型,采用安全高效的safetensors格式封装,针对艺术人像…...

VoxCPM-1.5语音合成作品集:高清自然语音生成效果展示
VoxCPM-1.5语音合成作品集:高清自然语音生成效果展示 1. 开篇:当AI学会"说话" 想象一下,你正在制作一部有声书,需要一位声音温暖、吐字清晰的主播。传统方式可能需要花费数千元聘请专业配音员,录制数小时音…...

使用Docker部署Qwen3-TTS语音生成服务
使用Docker部署Qwen3-TTS语音生成服务 1. 引言 语音合成技术正在改变我们与机器交互的方式,而Qwen3-TTS作为开源领域的佼佼者,提供了高质量的语音生成能力。传统的部署方式往往需要复杂的环境配置和依赖安装,这让很多开发者望而却步。 Doc…...