BetaFlight统一硬件AOCODARC H7DUAL配置文件讨论
BetaFlight统一硬件AOCODARC H7DUAL配置文件讨论
- 1. 源由
- 2. Review配置
- 3. 分析整理
- 3.1 生产商信息
- 3.2 磁力计
- 3.3 气压计
- 3.4 陀螺仪
- 3.5 串口RxTx
- 3.6 板载Flash
- 3.7 模拟OSD MAX7456
- 3.8 PPM接收机
- 3.9 伺服器
- 3.10 LED灯带
- 3.11 蜂鸣器
- 3.12 电机 X8
- 3.13 ADC(电压/电流/RSSI信号强度/空速计)
- 3.14 LED指示灯
- 3.15 pinio设置
- 3.16 RC链路
- 3.17 USB OTG功能
- 3.18 其他问题
- 4. 问题汇总
- 5. 参考资料
1. 源由
手边正好有一块AOCODARC H7DUAL的板子,后续也许可以派上用处。
鉴于BetaFlight统一硬件配置文件研读有了一个大概的了解,针对上述板子做一个简单review,并记录澄清一些问题。

2. Review配置
详见:AOCODARC H7DUAL
进行讨论的配置文件版本:
#define USE_ACCGYRO_BMI270
#define USE_BARO_DPS310
#define USE_FLASH_W25N01G
#define USE_MAX7456board_name AOCODARCH7DUAL
manufacturer_id SJET# resources
resource BEEPER 1 A15
resource MOTOR 1 B00
resource MOTOR 2 B01
resource MOTOR 3 A00
resource MOTOR 4 A01
resource MOTOR 5 A02
resource MOTOR 6 A03
resource MOTOR 7 D12
resource MOTOR 8 D13
resource SERVO 1 E05
resource SERVO 2 E06
resource PPM 1 A10
resource LED_STRIP 1 A08
resource SERIAL_TX 1 A09
resource SERIAL_TX 2 D05
resource SERIAL_TX 3 D08
resource SERIAL_TX 4 B09
resource SERIAL_TX 6 C06
resource SERIAL_TX 7 E08
resource SERIAL_TX 8 E01
resource SERIAL_RX 1 A10
resource SERIAL_RX 2 D06
resource SERIAL_RX 3 D09
resource SERIAL_RX 4 B08
resource SERIAL_RX 6 C07
resource SERIAL_RX 7 E07
resource SERIAL_RX 8 E00
resource I2C_SCL 1 B06
resource I2C_SCL 2 B10
resource I2C_SDA 1 B07
resource I2C_SDA 2 B11
resource LED 1 E03
resource LED 2 E04
resource SPI_SCK 1 A05
resource SPI_SCK 2 B13
resource SPI_SCK 3 B03
resource SPI_SCK 4 E12
resource SPI_MISO 1 A06
resource SPI_MISO 2 B14
resource SPI_MISO 3 B04
resource SPI_MISO 4 E13
resource SPI_MOSI 1 D07
resource SPI_MOSI 2 B15
resource SPI_MOSI 3 B05
resource SPI_MOSI 4 E14
resource ESCSERIAL 1 C07
resource ADC_BATT 1 C00
resource ADC_RSSI 1 C05
resource ADC_CURR 1 C01
resource ADC_EXT 1 C04
resource PINIO 1 D10
resource PINIO 2 D11
resource FLASH_CS 1 D03
resource OSD_CS 1 B12
resource GYRO_EXTI 1 B02
resource GYRO_EXTI 2 E15
resource GYRO_CS 1 C15
resource GYRO_CS 2 E11
resource USB_DETECT 1 E02# timer
timer A10 AF1
# pin A10: TIM1 CH3 (AF1)
timer B00 AF2
# pin B00: TIM3 CH3 (AF2)
timer B01 AF2
# pin B01: TIM3 CH4 (AF2)
timer A00 AF2
# pin A00: TIM5 CH1 (AF2)
timer A01 AF2
# pin A01: TIM5 CH2 (AF2)
timer A02 AF2
# pin A02: TIM5 CH3 (AF2)
timer A03 AF2
# pin A03: TIM5 CH4 (AF2)
timer D12 AF2
# pin D12: TIM4 CH1 (AF2)
timer D13 AF2
# pin D13: TIM4 CH2 (AF2)
timer D14 AF2
# pin D14: TIM4 CH3 (AF2)
timer D15 AF2
# pin D15: TIM4 CH4 (AF2)
timer E05 AF4
# pin E05: TIM15 CH1 (AF4)
timer E06 AF4
# pin E06: TIM15 CH2 (AF4)
timer A08 AF1
# pin A08: TIM1 CH1 (AF1)# dma
dma ADC 1 8
# ADC 1: DMA2 Stream 0 Request 9
dma ADC 3 9
# ADC 3: DMA2 Stream 1 Request 115
dma TIMUP 1 0
# TIMUP 1: DMA1 Stream 0 Request 15
dma TIMUP 3 2
# TIMUP 3: DMA1 Stream 2 Request 27
dma TIMUP 4 1
# TIMUP 4: DMA1 Stream 1 Request 32
dma TIMUP 5 0
# TIMUP 5: DMA1 Stream 0 Request 59
dma pin A10 0
# pin A10: DMA1 Stream 0 Request 13
dma pin B00 0
# pin B00: DMA1 Stream 0 Request 25
dma pin B01 1
# pin B01: DMA1 Stream 1 Request 26
dma pin A00 2
# pin A00: DMA1 Stream 2 Request 55
dma pin A01 3
# pin A01: DMA1 Stream 3 Request 56
dma pin A02 4
# pin A02: DMA1 Stream 4 Request 57
dma pin A03 5
# pin A03: DMA1 Stream 5 Request 58
dma pin D12 6
# pin D12: DMA1 Stream 6 Request 29
dma pin D13 7
# pin D13: DMA1 Stream 7 Request 30
dma pin D14 12
# pin D14: DMA2 Stream 4 Request 31
dma pin E05 0
# pin E05: DMA1 Stream 0 Request 105
dma pin A08 14
# pin A08: DMA2 Stream 6 Request 11# feature
feature RX_SERIAL
feature TELEMETRY
feature OSD# serial
serial 0 64 115200 57600 0 115200# master
set gyro_to_use = BOTH
set mag_bustype = I2C
set mag_i2c_device = 1
set baro_bustype = I2C
set baro_i2c_device = 2
set blackbox_device = SPIFLASH
set current_meter = ADC
set battery_meter = ADC
set ibata_scale = 500
set beeper_inversion = ON
set beeper_od = OFF
set max7456_spi_bus = 2
set pinio_config = 129,1,1,1
set pinio_box = 39,40,255,255
set flash_spi_bus = 3
set gyro_1_bustype = SPI
set gyro_1_spibus = 1
set gyro_1_sensor_align = CW90
set gyro_1_align_yaw = 900
set gyro_2_spibus = 4
set gyro_2_sensor_align = CW180
set gyro_2_align_yaw = 1800
3. 分析整理
3.1 生产商信息
board_name AOCODARCH7DUAL
manufacturer_id SJET
3.2 磁力计
//板载无磁力计,但是总线还是申明了【兼容,挺好的方法;实用】
set mag_bustype = I2C
set mag_i2c_device = 1resource I2C_SCL 1 B06
resource I2C_SDA 1 B07
3.3 气压计
#define USE_BARO_DPS310
set baro_bustype = I2C
set baro_i2c_device = 2resource I2C_SCL 2 B10
resource I2C_SDA 2 B11
3.4 陀螺仪
#define USE_ACCGYRO_BMI270
set gyro_to_use = BOTHset gyro_1_bustype = SPI
set gyro_1_spibus = 1
resource SPI_SCK 1 A05
resource SPI_MISO 1 A06
resource SPI_MOSI 1 D07resource GYRO_EXTI 1 B02
resource GYRO_CS 1 C15set gyro_1_sensor_align = CW90
set gyro_1_align_yaw = 900//问题1:为什么没有配置gyro_2_bustype?
set gyro_2_spibus = 4
resource SPI_SCK 4 E12
resource SPI_MISO 4 E13
resource SPI_MOSI 4 E14resource GYRO_EXTI 2 E15
resource GYRO_CS 2 E11set gyro_2_sensor_align = CW180
set gyro_2_align_yaw = 1800
3.5 串口RxTx
resource SERIAL_TX 1 A09
resource SERIAL_TX 2 D05
resource SERIAL_TX 3 D08
resource SERIAL_TX 4 B09
resource SERIAL_TX 6 C06
resource SERIAL_TX 7 E08
resource SERIAL_TX 8 E01
resource SERIAL_RX 1 A10
resource SERIAL_RX 2 D06
resource SERIAL_RX 3 D09
resource SERIAL_RX 4 B08
resource SERIAL_RX 6 C07
resource SERIAL_RX 7 E07
resource SERIAL_RX 8 E00resource ESCSERIAL 1 C07//问题2:serial 0配置主要目的是什么,不能默认让用户进行配置吗?
serial 0 64 115200 57600 0 115200
3.6 板载Flash
#define USE_FLASH_W25N01Gset blackbox_device = SPIFLASH
set flash_spi_bus = 3
resource SPI_SCK 3 B03
resource SPI_MISO 3 B04
resource SPI_MOSI 3 B05resource FLASH_CS 1 D03
3.7 模拟OSD MAX7456
#define USE_MAX7456
feature OSDset max7456_spi_bus = 2
resource SPI_SCK 2 B13
resource SPI_MISO 2 B14
resource SPI_MOSI 2 B15resource OSD_CS 1 B12
3.8 PPM接收机
resource PPM 1 A10timer A10 AF1
# pin A10: TIM1 CH3 (AF1)dma pin A10 0
# pin A10: DMA1 Stream 0 Request 13
3.9 伺服器
resource SERVO 1 E05
resource SERVO 2 E06timer E05 AF4
# pin E05: TIM15 CH1 (AF4)
timer E06 AF4
# pin E06: TIM15 CH2 (AF4)dma pin E05 0
# pin E05: DMA1 Stream 0 Request 105//问题3:为什么伺服器SERVO 1分配了DMA资源,但是SERVO 2没有分配?
3.10 LED灯带
resource LED_STRIP 1 A08timer A08 AF1
# pin A08: TIM1 CH1 (AF1)dma pin A08 14
# pin A08: DMA2 Stream 6 Request 11
3.11 蜂鸣器
resource BEEPER 1 A15set beeper_inversion = ON
set beeper_od = OFF
3.12 电机 X8
resource MOTOR 1 B00
resource MOTOR 2 B01
resource MOTOR 3 A00
resource MOTOR 4 A01
resource MOTOR 5 A02
resource MOTOR 6 A03
resource MOTOR 7 D12
resource MOTOR 8 D13timer B00 AF2
# pin B00: TIM3 CH3 (AF2)
timer B01 AF2
# pin B01: TIM3 CH4 (AF2)
timer A00 AF2
# pin A00: TIM5 CH1 (AF2)
timer A01 AF2
# pin A01: TIM5 CH2 (AF2)
timer A02 AF2
# pin A02: TIM5 CH3 (AF2)
timer A03 AF2
# pin A03: TIM5 CH4 (AF2)
timer D12 AF2
# pin D12: TIM4 CH1 (AF2)
timer D13 AF2
# pin D13: TIM4 CH2 (AF2)dma pin B00 0
# pin B00: DMA1 Stream 0 Request 25
dma pin B01 1
# pin B01: DMA1 Stream 1 Request 26
dma pin A00 2
# pin A00: DMA1 Stream 2 Request 55
dma pin A01 3
# pin A01: DMA1 Stream 3 Request 56
dma pin A02 4
# pin A02: DMA1 Stream 4 Request 57
dma pin A03 5
# pin A03: DMA1 Stream 5 Request 58
dma pin D12 6
# pin D12: DMA1 Stream 6 Request 29
dma pin D13 7
# pin D13: DMA1 Stream 7 Request 30
3.13 ADC(电压/电流/RSSI信号强度/空速计)
resource ADC_BATT 1 C00
resource ADC_RSSI 1 C05
resource ADC_CURR 1 C01
resource ADC_EXT 1 C04dma ADC 1 8
# ADC 1: DMA2 Stream 0 Request 9
dma ADC 3 9
# ADC 3: DMA2 Stream 1 Request 115set current_meter = ADC
set battery_meter = ADCset ibata_scale = 500
注:电流传感器校准参数
3.14 LED指示灯
resource LED 1 E03
resource LED 2 E04
注:FCs should implement at least one LED to indicate activity. The second is preferable, and the third optional.
3.15 pinio设置
resource PINIO 1 D10
resource PINIO 2 D11set pinio_config = 129,1,1,1
set pinio_box = 39,40,255,255
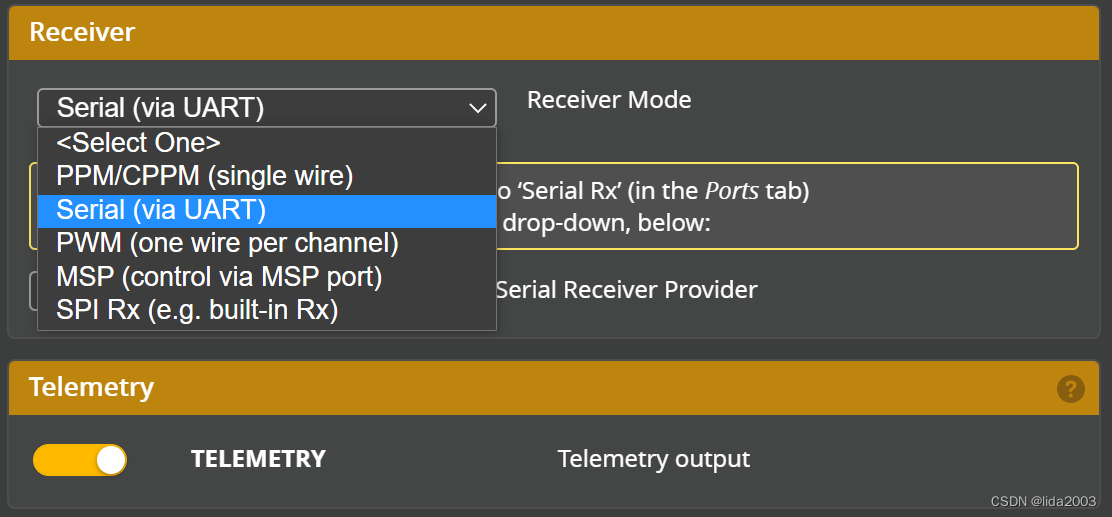
3.16 RC链路
feature RX_SERIAL
feature TELEMETRY
注:这个其实厂家也可以不配置,在BetaFlight Configurator的UI界面是可以配置的。
3.17 USB OTG功能
//问题3:USB_DETECT有什么特殊用途吗?resource USB_DETECT 1 E02
3.18 其他问题
//问题4:板子配置文件中dma TIMUP配置主要用途是什么?dma TIMUP 1 0
# TIMUP 1: DMA1 Stream 0 Request 15
dma TIMUP 3 2
# TIMUP 3: DMA1 Stream 2 Request 27
dma TIMUP 4 1
# TIMUP 4: DMA1 Stream 1 Request 32
dma TIMUP 5 0
# TIMUP 5: DMA1 Stream 0 Request 59//问题5:D14和D15的用途是什么?timer D14 AF2
# pin D14: TIM4 CH3 (AF2)
timer D15 AF2
# pin D15: TIM4 CH4 (AF2)dma pin D14 12
# pin D14: DMA2 Stream 4 Request 31
4. 问题汇总
- 问题1:为什么没有配置gyro_2_bustype?
已反馈生厂商或研读代码,待继续跟进。
- 问题2:serial 0配置主要目的是什么,不能默认让用户进行配置吗?
已反馈生厂商或研读代码,待继续跟进。
- 问题3:USB_DETECT有什么特殊用途吗?
a) 目前BetaFlight上没有用到这个引脚的功能。
b) 从精简的角度考虑,可以删除(已经与厂商确认)。
c) 个人认为这个引脚不配置,还可以做其他用途。不知道板子是否引出到GPIO口子上,估计没有。
- 问题4:板子配置文件中dma TIMUP配置主要用途是什么?
已反馈生厂商或研读代码,待继续跟进。
- 问题5:D14和D15的用途是什么?
厂家反馈:S9(D14)和S10(D15)分别对应电机#9和电机#10
但是电机相关的resource/timer/dma相关定义又不全
上述问题汇总,希望大家能指正/纠错,让博主和读者更加了解这些配置项。如有更新信息,会尽快将问题的答案更新上来,请感兴趣的朋友持续关注!
5. 参考资料
【1】BetaFlight开源代码框架简介
【2】BetaFlight统一硬件资源简单配置修改
【3】BetaFlight统一硬件配置文件研读
【4】BetaFlight Manufacturer Section
相关文章:
BetaFlight统一硬件AOCODARC H7DUAL配置文件讨论
BetaFlight统一硬件AOCODARC H7DUAL配置文件讨论 1. 源由2. Review配置3. 分析整理3.1 生产商信息3.2 磁力计3.3 气压计3.4 陀螺仪3.5 串口RxTx3.6 板载Flash3.7 模拟OSD MAX74563.8 PPM接收机3.9 伺服器3.10 LED灯带3.11 蜂鸣器3.12 电机 X83.13 ADC(电压/电流/RSSI信号强度/空…...
力扣题库刷题笔记682-棒球比赛
1、题目如下: 2、个人Python代码实现如下: 代码如下: class Solution: def calPoints(self, operations: List[str]) -> int: i 0 #用于遍历元素的下标 while i < len(operations): …...

SpringCloud------Eureka修改实例显示信息、服务发现Discovery、自我保护(六)
SpringCloud------Eureka修改实例显示信息、服务发现Discovery、自我保护(六) 1.actuator微服务信息完善 2.服务发现Discovery 3.Eureka自我保护 actuator微服务信息完善 web和actuator依赖用于图形化监控 1.主机名称:服务名称修改 新增…...

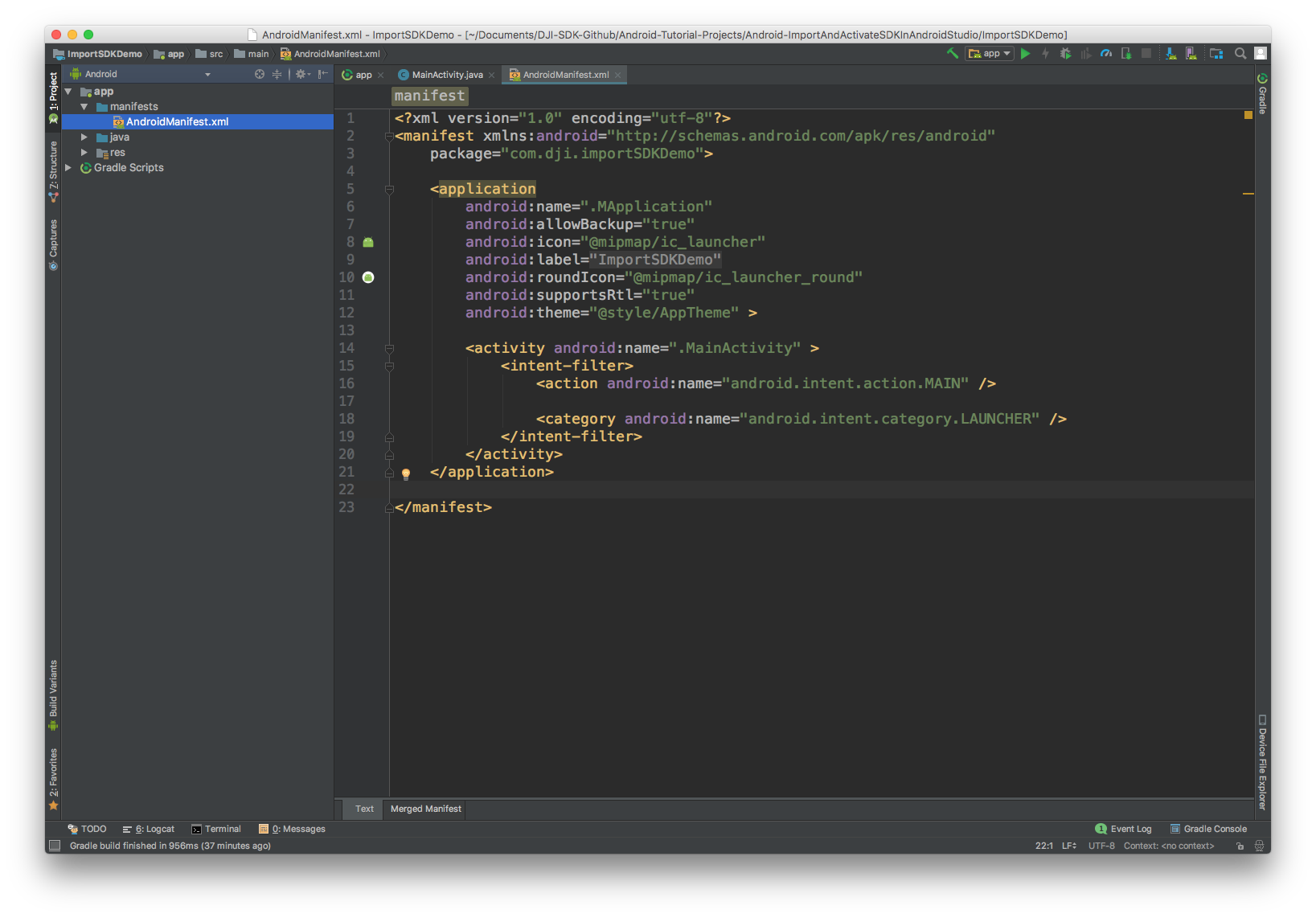
Java 远程debug,IDEA 远程 Debug 调试
有时候我们需要进行远程的debug,本文研究如何进行远程debug,以及使用 IDEA 远程debug的过程中的细节。看完可以解决你的一些疑惑。 配置 远程debug的服务,以SpringBoot微服务为例。 首先,启动SpringBoot需要加上特定的参数。 …...

将webrtc的音频模式改为共享模式
修改音频设备模式:打开文件modules/audio_device/include/audio_device.h,将AudioDeviceModule::kPlatformDefaultAudioProcessing为true改为false。这将禁用默认的音频处理,使得可以修改音频设备模式。 修改音频设备模式的初始化:打开文件modules/audio_device/audio_dev…...
电脑cpu占用率高?怎么办?1分钟快速解决!
案例:电脑cup过高怎么办? 【我的电脑运行缓慢,导致我学习和工作的效率很低。刚刚查看了一下电脑,发现它的cpu占用率很高。有没有小伙伴知道如何解决此电脑cpu过高的问题?】 电脑是我们生活中不可缺少的工具ÿ…...
使用JPA自动生成代码(轻松上手看了就会版)
目录 背景:方案概念:JPA 的主要作用 jpa简单使用(Springboot项目)jpa进阶使用总结 背景: 项目需要自动生成sql代码,不需要写sql语句,能够自动进行查询,我想到了JPA。 方案 概念&a…...

jdk动态代理
jdk动态代理:基于反射动态生成代理对象 pwp动态代理的步骤比较复杂,无需特别深入的理解,在jdk中固定的步骤,只需要知道这些步骤即可,不必钻牛角尖 动态代理涉及到的三个反射包类 InvocationHandlerMethodProxy 1. InvocationHand…...

备忘录模式
备忘录模式 备忘录模式定义使用场景1、撤销操作:2、游戏进度保存:3、定时器:4、浏览器历史记录:5、购物车状态保存:6、场景总结 角色定义Originator 发起人角色:Memento 备忘录角色:Caretaker 备忘灵管理员角色:需求背…...

问题解决:跨域访问错误
今天做前端页面渲染的时候遇到一个问题, 因为我使用的wsl开发,windows直接访问不了wsl中的文件,还要改其他配置没成功,索性就不改了,粘贴在桌面上用浏览器打开调试 然后所有使用apifox通过测试的路径全部报错 Ensure CORS response header values are validA cross-origin reso…...

程序员应该怎么自学才能入门 ?我来聊聊自己的经历
当你想成为一名程序员,如何自学入门是一个非常重要的问题。在这里我分享一下我的经验,希望能对你有所帮助。 首先,为了制定好你的学习路线,你可以在网上的培训机构网站找到一张基础路线图。这张路线图必须是跟行业对标的…...

听我一句劝,别去外包,干了6年,废了....
先说一下自己的情况,大专生,18年通过校招进入湖南某软件公司,干了接近6年的功能测试,今年年初,感觉自己不能够在这样下去了,长时间呆在一个舒适的环境会让一个人堕落!而我已经在一个企业干了6年的功能测试&…...

leetcode 88 合并两个有序数组
题目描述: 给你两个按 非递减顺序 排列的整数数组 nums1 和 nums2,另有两个整数 m 和 n ,分别表示 nums1 和 nums2 中的元素数目。 请你 合并 nums2 到 nums1 中,使合并后的数组同样按 非递减顺序 排列。 注意:最终&am…...
软件项目成本控制的5大关键点 不得不重视
软件项目成本一般分为运营成本和项目成本。而运营成本比较固定,压缩和削减的余地不大。而在项目成本中,最主要的成本是人工成本。那么如何提高项目开发效率,节约人工成本,对成本管理至关重要。 我们从以下几个影响项目成本的主要因…...

CSS样式更改:边框Border的另类用法
CSS样式更改——字体设置Font&边框Border 随着互联网技术的不断发展,网页设计已经成为了一项非常重要的工作。在网页设计中,字体设置和边框Border是两个非常常见的CSS样式,可以通过这两个样式对网页的外观进行设置。下面,我们…...
)
shell的灵活运用 (函数,关联数组,循环,awk,sed等)
题目 提示:没有基础请先看看基础部分的讲解,否则看不懂 1,编写函数,实现判断是否无位置参数,如无参数,提示错误 代码: #bash/bin function a() {b$# #判断传入的参数个数 # echo $b…...
大疆无人机 MobileSDK(遥控器/手机端)开发 v4版<1>
大疆无人机飞控开发 大疆无人机SDK开发包功能概述飞行控制相机实时视频流传感器数据下载媒体文件遥控器,电池和无线链路连接应用程序和产品 v4版sdk 二次开发注册成为DJI开发者生成 App KeyAndroid 示例代码配置Android Studio项目集成创建一个新的应用配置Gradle 脚…...
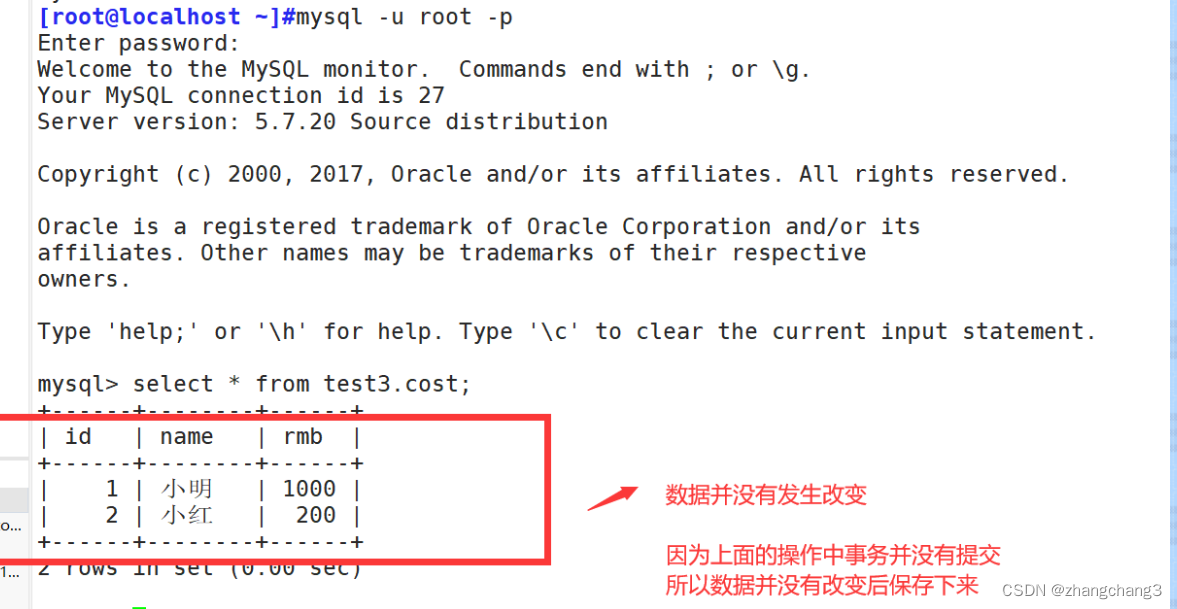
mysql数据库之事务
1.事务的概念 事务是一种机制、一个操作序列,包含了一组数据库操作命令,并且把所有的命令作为一个 整体一起向系统提交或撤销操作请求,即这一组数据库命令要么都执行,要么都不执行。 事务是一个不可分割的工作逻辑单元…...

安装运行Hyperf
安装运行Hyperf 上回讲到,我们对一个普通的 Laravel 框架进行了改造,让它可以在 Swoole 环境下使用,不过其中会有很多问题可能我们一时考虑不到,就会造成程序的稳定性出现问题。那么,今天我们就来学习一个原生的 Swoo…...
回收站文件恢复,分享4个巧妙解决方法!
案例:回收站文件怎么恢复 【清理电脑时一不小心清空了我的回收站,有朋友知道该怎么恢复吗?急急急!】 回收站对于电脑用户来说,可以带来很多的方便,能让用户能够在删除文件后将其恢复。但是,有…...
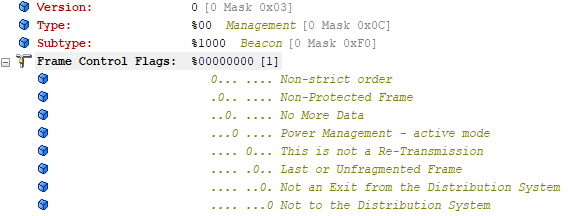
【WiFi帧结构】
文章目录 帧结构MAC头部管理帧 帧结构 Wi-Fi的帧分为三部分组成:MAC头部frame bodyFCS,其中MAC是固定格式的,frame body是可变长度。 MAC头部有frame control,duration,address1,address2,addre…...

Neo4j 集群管理:原理、技术与最佳实践深度解析
Neo4j 的集群技术是其企业级高可用性、可扩展性和容错能力的核心。通过深入分析官方文档,本文将系统阐述其集群管理的核心原理、关键技术、实用技巧和行业最佳实践。 Neo4j 的 Causal Clustering 架构提供了一个强大而灵活的基石,用于构建高可用、可扩展且一致的图数据库服务…...

新能源汽车智慧充电桩管理方案:新能源充电桩散热问题及消防安全监管方案
随着新能源汽车的快速普及,充电桩作为核心配套设施,其安全性与可靠性备受关注。然而,在高温、高负荷运行环境下,充电桩的散热问题与消防安全隐患日益凸显,成为制约行业发展的关键瓶颈。 如何通过智慧化管理手段优化散…...
Mobile ALOHA全身模仿学习
一、题目 Mobile ALOHA:通过低成本全身远程操作学习双手移动操作 传统模仿学习(Imitation Learning)缺点:聚焦与桌面操作,缺乏通用任务所需的移动性和灵活性 本论文优点:(1)在ALOHA…...

python报错No module named ‘tensorflow.keras‘
是由于不同版本的tensorflow下的keras所在的路径不同,结合所安装的tensorflow的目录结构修改from语句即可。 原语句: from tensorflow.keras.layers import Conv1D, MaxPooling1D, LSTM, Dense 修改后: from tensorflow.python.keras.lay…...

站群服务器的应用场景都有哪些?
站群服务器主要是为了多个网站的托管和管理所设计的,可以通过集中管理和高效资源的分配,来支持多个独立的网站同时运行,让每一个网站都可以分配到独立的IP地址,避免出现IP关联的风险,用户还可以通过控制面板进行管理功…...
【 java 虚拟机知识 第一篇 】
目录 1.内存模型 1.1.JVM内存模型的介绍 1.2.堆和栈的区别 1.3.栈的存储细节 1.4.堆的部分 1.5.程序计数器的作用 1.6.方法区的内容 1.7.字符串池 1.8.引用类型 1.9.内存泄漏与内存溢出 1.10.会出现内存溢出的结构 1.内存模型 1.1.JVM内存模型的介绍 内存模型主要分…...

Bean 作用域有哪些?如何答出技术深度?
导语: Spring 面试绕不开 Bean 的作用域问题,这是面试官考察候选人对 Spring 框架理解深度的常见方式。本文将围绕“Spring 中的 Bean 作用域”展开,结合典型面试题及实战场景,帮你厘清重点,打破模板式回答,…...

libfmt: 现代C++的格式化工具库介绍与酷炫功能
libfmt: 现代C的格式化工具库介绍与酷炫功能 libfmt 是一个开源的C格式化库,提供了高效、安全的文本格式化功能,是C20中引入的std::format的基础实现。它比传统的printf和iostream更安全、更灵活、性能更好。 基本介绍 主要特点 类型安全:…...

字符串哈希+KMP
P10468 兔子与兔子 #include<bits/stdc.h> using namespace std; typedef unsigned long long ull; const int N 1000010; ull a[N], pw[N]; int n; ull gethash(int l, int r){return a[r] - a[l - 1] * pw[r - l 1]; } signed main(){ios::sync_with_stdio(false), …...