matlab进行双目标定获取双目参数并打印教程
文章目录
- 前言
- 1.打开matlab进行双目标定
- 2.获取想要的参数
前言
在相同的标定算法和标定参数下,Python和Matlab的标定精度是相同的。因为标定精度主要取决于标定算法和标定参数的质量,而不是编程语言的选择。
不同的编程语言可能使用不同的库或实现细节,可能会导致一些差异,但这种差异通常很小。因此,应该选择更熟悉的编程语言来进行标定,同时注意使用正确的算法和参数,确保标定的精度达到预期。
我一般就是两个都用一次,看哪个精度高一点。
1.打开matlab进行双目标定
输入下面代码,启动双目标定工具箱
stereoCameraCalibrator
选择add images,添加左右图像和标定板尺寸
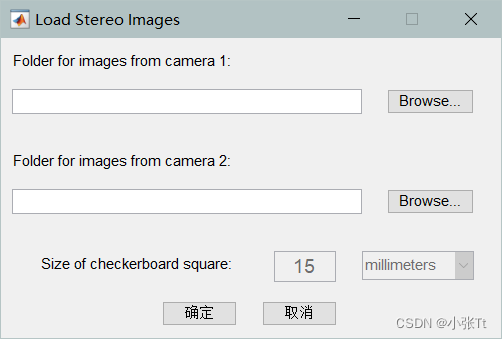
详细步骤可以参考我的另一篇文章:matlab单双目标定提取相机标定中各张标定图片的重投影误差数据
2.获取想要的参数
这里畸变系数我是按左右相机畸变系数:[k1, k2, p1, p2, k3]保存的,大家不需要的话,可以修改一下。
% 内参参数
intrinsics1 = stereoParams.CameraParameters1.IntrinsicMatrix;
intrinsics2 = stereoParams.CameraParameters2.IntrinsicMatrix;% 外参参数
rotation = stereoParams.RotationOfCamera2;
translation = stereoParams.TranslationOfCamera2;
[R, t] = cameraPoseToExtrinsics(rotation, translation);% 焦距
focalLength1 = intrinsics1(1,1);
focalLength2 = intrinsics2(1,1);
f = (focalLength1+focalLength2)/2% 基线
baseline = norm(t);% 左相机畸变系数
distCoeffs1 = stereoParams.CameraParameters1.RadialDistortion;
tangCoeffs1 = stereoParams.CameraParameters1.TangentialDistortion;
leftDistCoeffs = [distCoeffs1(1:2) tangCoeffs1 distCoeffs1(3)];% 右相机畸变系数
distCoeffs2 = stereoParams.CameraParameters2.RadialDistortion;
tangCoeffs2 = stereoParams.CameraParameters2.TangentialDistortion;
rightDistCoeffs = [distCoeffs2(1:2) tangCoeffs2 distCoeffs2(3)];% 打印参数
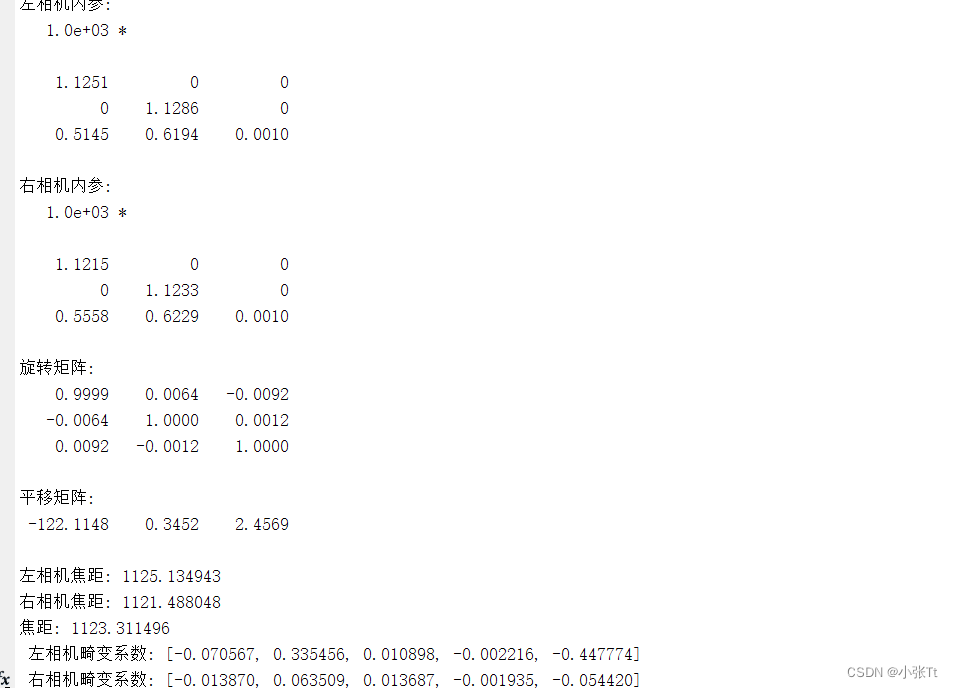
fprintf('左相机内参: \n');
disp(intrinsics1);
fprintf('右相机内参: \n');
disp(intrinsics2);fprintf('旋转矩阵: \n');
disp(R);
fprintf('平移矩阵: \n');
disp(t);fprintf('左相机焦距: %f\n', focalLength1);
fprintf('右相机焦距: %f\n', focalLength2);
fprintf('焦距: %f\n', f);% 打印参数[k1, k2, p1, p2, k3]
fprintf(' 左相机畸变系数: [%f, %f, %f, %f, %f]\n', leftDistCoeffs);
fprintf(' 右相机畸变系数: [%f, %f, %f, %f, %f]\n', rightDistCoeffs);fprintf('基线: %f\n', baseline);
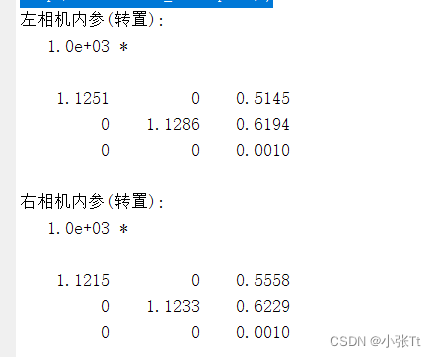
我们在使用python过程中,常常需要转换一下内参外参。
由于Matlab和Python的内参矩阵定义方式略有不同,Matlab中的内参矩阵需要进行转置后才能用于Python的cv2.stereoRectify。因此,在将Matlab的内参矩阵用于Python的cv2.stereoRectify时,需要进行转置操作。
% 内参参数
intrinsics1 = stereoParams.CameraParameters1.IntrinsicMatrix;
intrinsics2 = stereoParams.CameraParameters2.IntrinsicMatrix;% 对内参矩阵进行转置
intrinsics1_transpose = intrinsics1';
intrinsics2_transpose = intrinsics2';% 输出转置后的内参矩阵
fprintf('左相机内参(转置): \n');
disp(intrinsics1_transpose);
fprintf('右相机内参(转置): \n');
disp(intrinsics2_transpose);
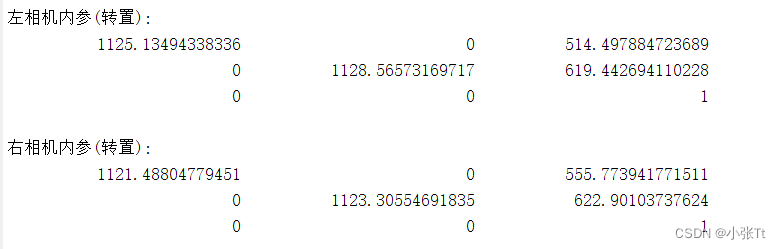
此外,如果想临时关闭科学计数法,可以输入,永久关闭请百度:
format long g
相关文章:
matlab进行双目标定获取双目参数并打印教程
文章目录前言1.打开matlab进行双目标定2.获取想要的参数前言 在相同的标定算法和标定参数下,Python和Matlab的标定精度是相同的。因为标定精度主要取决于标定算法和标定参数的质量,而不是编程语言的选择。 不同的编程语言可能使用不同的库或实现细节&…...

JVM类加载机制
回到2018年的抖音哈哈. 回顾下: java开发环境: java编译运行过程: 1) 编译期:.java源文件,经过编译,生成.class字节码文件 2) 运行期:JVM加载.class并运行.class(0和1) 特点: 跨平台、一次编程,处处报错 名词解释: 1…...

8.1 优化概述
数据库性能取决于数据库级别的几个因素,例如表、查询和配置设置。这些软件结构导致了硬件级别的 CPU 和 I/O 操作,您必须将其最小化并尽可能提高效率。在研究数据库性能时,首先要学习软件端的高级规则和准则,然后使用墙上的时钟时…...

从0到1一步一步玩转openEuler--14 openEuler DNF(YUM)配置管理
文章目录14.1 DNF配置文件14.1.1 配置main部分14.1.2 配置repository部分14.1.3 显示当前配置14.2 创建本地软件源仓库14.3 添加、启用和禁用软件源14.3.1 添加软件源14.3.2 禁用软件源14.3.3 启用软件源DNF是一款Linux软件包管理工具,用于管理RPM软件包。DNF可以查…...

leetcode707 设计链表 带有输入和输出的
题目: 设计链表的实现。您可以选择使用单链表或双链表。单链表中的节点应该具有两个属性:val 和 next。val 是当前节点的值,next 是指向下一个节点的指针/引用。如果要使用双向链表,则还需要一个属性 prev 以指示链表中的上一个节…...
100种思维模型之非sr思维模型-012
什么是sr? sr是stimulus-response的缩写,意思是刺激反应。 那么非sr思维模型就是非刺激反应思维模型的意思。 今天我们来聊聊非sr思维模型——一个提醒我们思考,提醒我们任何时刻都有选择权的思维模型。 本文依然从三个方面进行介绍,何谓…...

绿竹生物再冲刺港交所上市:暂未商业化,孔健夫妇为实控人
近日,北京绿竹生物技术股份有限公司(下称“绿竹生物”)在港交所递交招股书,准备在港交所主板上市,中金公司为其独家保荐人。据贝多财经了解,绿竹生物曾于2022年6月28日在港交所递表。 相较于此前招股书&am…...

加拿大MSB金融牌照申请方案
什么是加拿大MSB金融牌照? 根据犯罪所得(洗钱)和恐怖主义融资法案,您的企业必须在加拿大金融交易和报告分析中心 (FINTRAC) 注册成为货币服务企业。自 2020 年 6 月 1 日起,外国货币服务企业也必须在 FINTRAC 注册&…...

javaEE 初阶 — 滑动窗口
文章目录滑动窗口1 滑动窗口下如何处理丢包TCP 工作机制:确认应答机制 超时重传机制 连接管理机制 滑动窗口 确认应答机制、超时重传机制、连接管理机制 都是给 TCP 的可靠性提供支持的。 虽然事变的比较可靠了,但是是有牺牲的,那就是传输…...

大咖说·图书分享|狼书(卷3):Node.js高级技术
Node.js都有哪些需要掌握的高级技术?前端为什么同样需要学习? Node.js未来的发展趋势究竟如何?本期大咖说,Node布道师桑世龙携新作《狼书(卷3):Node.js高级技术》展开分享。 ● 嘉宾介绍 桑世龙:Node布道…...
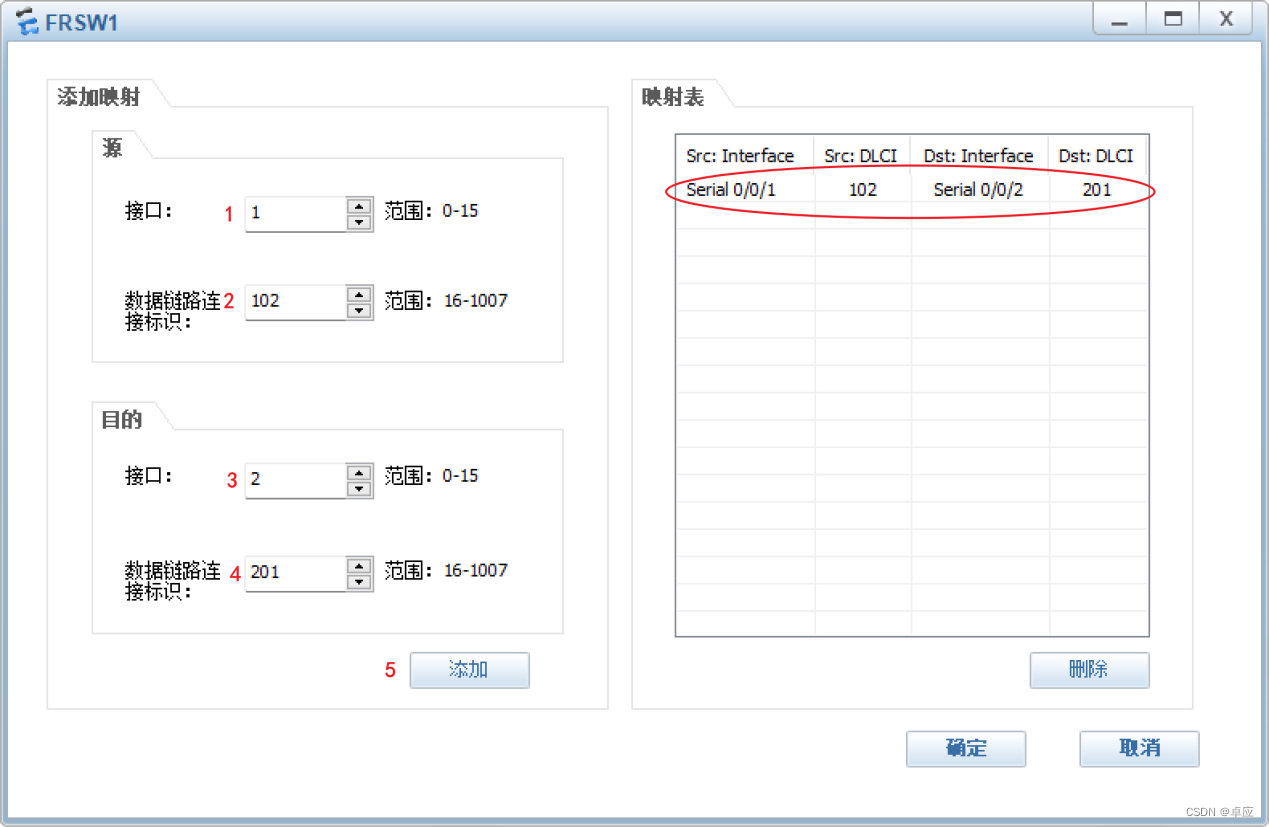
1.5配置NBMA和P2MP网络类型
1.3.3实验5:配置NBMA和P2MP网络类型 1. 实验需求 控制OSPF DR的选举修改OSPF的网络类型2. 实验拓扑 配置NBMA和P2MP网络类型实验拓扑如图1-13所示。 图1-13 配置NBMA和P2MP网络类型 3. 实验步骤 帧中继的配置如图1-14和图1-15所示...

Java面试题
三次握手,四次挥手中,为什么要挥手四次 第一次握手,客户端发送同步报文到服务端,客户端知道自己有发送数据能力,不知道服务端是否有发送、接受数据能力。 第二次握手,服务端收到同步报文,并回复…...
opencv锁定鼠标定位
大家好,我是csdn的博主:lqj_本人 这是我的个人博客主页: lqj_本人的博客_CSDN博客-微信小程序,前端,python领域博主lqj_本人擅长微信小程序,前端,python,等方面的知识https://blog.csdn.net/lbcyllqj?spm1011.2415.3001.5343哔哩哔哩欢迎关注…...

机器连接和边缘计算
以一种高效、可扩展的方式进行连接和边缘计算的结合,解决了在工业物联网应用中的机器数据集成问题。 一 边缘计算 边缘计算描述了由中央平台管理的数据分散式处理。边缘计算对于工业物联网而言非常重要。在许多应用程序中,由于数据量非常大,…...
利用NGROK将本地网站发布为一个公开网站
一般与第三方服务集成时,需要提供https的回调URL,本地开发阶段可以利用NGROK将本地网站发布为公开的https网站。https://ngrok.com/downloadWindow下载地址:https://bin.equinox.io/c/bNyj1mQVY4c/ngrok-v3-stable-windows-amd64.zip以Window…...
Vulnhub 渗透练习(一)—— Breach 1.0
环境搭建 环境下载: https://www.vulnhub.com/entry/breach-1,152/ 环境描述: Vulnhub 中对此环境的描述: VM 配置有静态 IP 地址 (192.168.110.140),因此您需要将仅主机适配器配置到该子网。 这里我用的是 VMware ࿰…...

初探Spring采用Spring配置文件管理Bean
文章目录Spring容器演示--采用Spring配置文件管理Bean(一)创建Maven项目(二)添加Spring依赖(三)创建杀龙任务类(四)创建勇敢骑士类(五)采用传统方式让勇敢骑士…...
【手写 Vuex 源码】第十二篇 - Vuex 插件机制的实现
一,前言 上一篇,主要介绍了 Vuex 插件的开发,主要涉及以下几个点: Vuex 插件的使用介绍;Vuex 插件开发和使用分析;Vuex 插件机制的分析; 本篇,继续介绍 Vuex 插件机制的实现&…...
图像去噪技术简述
随着每天拍摄的数字图像数量激增,对更准确、更美观的图像的需求也在增加。然而,现代相机拍摄的图像不可避免地会受到噪声的影响,从而导致视觉图像质量下降。因此,需要在不丢失图像特征(边缘、角和其他尖锐结构…...
数据迁移——技术选型
日常我们在开发中,随着业务需求的变更,重构系统是很常见的事情。重构系统常见的一个场景是变更底层数据模型与存储结构。这种情况下就要对数据进行迁移,从而使业务能正常支行。 背景如下:老系统中使用了mongo数据库,由…...

手游刚开服就被攻击怎么办?如何防御DDoS?
开服初期是手游最脆弱的阶段,极易成为DDoS攻击的目标。一旦遭遇攻击,可能导致服务器瘫痪、玩家流失,甚至造成巨大经济损失。本文为开发者提供一套简洁有效的应急与防御方案,帮助快速应对并构建长期防护体系。 一、遭遇攻击的紧急应…...

反向工程与模型迁移:打造未来商品详情API的可持续创新体系
在电商行业蓬勃发展的当下,商品详情API作为连接电商平台与开发者、商家及用户的关键纽带,其重要性日益凸显。传统商品详情API主要聚焦于商品基本信息(如名称、价格、库存等)的获取与展示,已难以满足市场对个性化、智能…...

k8s从入门到放弃之Ingress七层负载
k8s从入门到放弃之Ingress七层负载 在Kubernetes(简称K8s)中,Ingress是一个API对象,它允许你定义如何从集群外部访问集群内部的服务。Ingress可以提供负载均衡、SSL终结和基于名称的虚拟主机等功能。通过Ingress,你可…...
YSYX学习记录(八)
C语言,练习0: 先创建一个文件夹,我用的是物理机: 安装build-essential 练习1: 我注释掉了 #include <stdio.h> 出现下面错误 在你的文本编辑器中打开ex1文件,随机修改或删除一部分,之后…...

【算法训练营Day07】字符串part1
文章目录 反转字符串反转字符串II替换数字 反转字符串 题目链接:344. 反转字符串 双指针法,两个指针的元素直接调转即可 class Solution {public void reverseString(char[] s) {int head 0;int end s.length - 1;while(head < end) {char temp …...

【AI学习】三、AI算法中的向量
在人工智能(AI)算法中,向量(Vector)是一种将现实世界中的数据(如图像、文本、音频等)转化为计算机可处理的数值型特征表示的工具。它是连接人类认知(如语义、视觉特征)与…...

IoT/HCIP实验-3/LiteOS操作系统内核实验(任务、内存、信号量、CMSIS..)
文章目录 概述HelloWorld 工程C/C配置编译器主配置Makefile脚本烧录器主配置运行结果程序调用栈 任务管理实验实验结果osal 系统适配层osal_task_create 其他实验实验源码内存管理实验互斥锁实验信号量实验 CMISIS接口实验还是得JlINKCMSIS 简介LiteOS->CMSIS任务间消息交互…...
)
安卓基础(aar)
重新设置java21的环境,临时设置 $env:JAVA_HOME "D:\Android Studio\jbr" 查看当前环境变量 JAVA_HOME 的值 echo $env:JAVA_HOME 构建ARR文件 ./gradlew :private-lib:assembleRelease 目录是这样的: MyApp/ ├── app/ …...
基于Java+VUE+MariaDB实现(Web)仿小米商城
仿小米商城 环境安装 nodejs maven JDK11 运行 mvn clean install -DskipTestscd adminmvn spring-boot:runcd ../webmvn spring-boot:runcd ../xiaomi-store-admin-vuenpm installnpm run servecd ../xiaomi-store-vuenpm installnpm run serve 注意:运行前…...
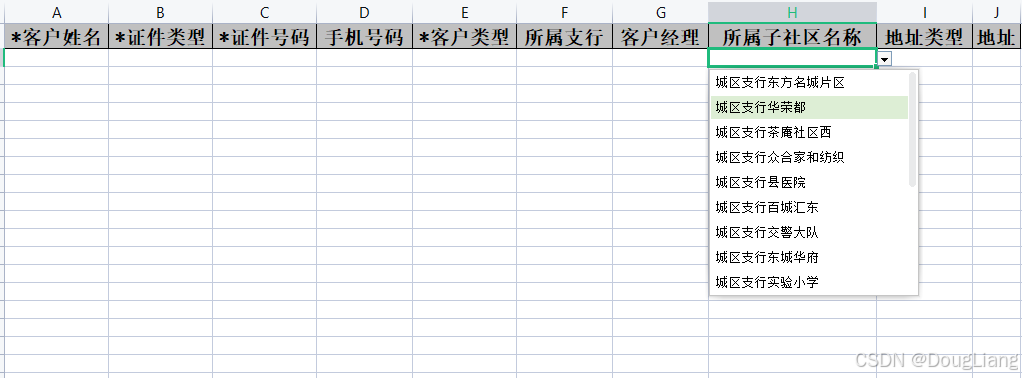
关于easyexcel动态下拉选问题处理
前些日子突然碰到一个问题,说是客户的导入文件模版想支持部分导入内容的下拉选,于是我就找了easyexcel官网寻找解决方案,并没有找到合适的方案,没办法只能自己动手并分享出来,针对Java生成Excel下拉菜单时因选项过多导…...