GEE学习笔记九十一:栅格影像叠置分析
最近发现好多人都在问一个问题,两张影像如何取其相交区域?其实这个问题简单来讲就是多张栅格影像进行叠加分析。在GEE中栅格影像不像矢量数据那样有直接的函数来做数据分析,需要我们自己手动写一些代码来实现这些操作。要实现这个功能有很多方法,这里简单说一下有几种方式:
第一种:先将栅格影像数据转换为矢量数据,然后在利用矢量数据计算。这种方式想想可以,但是千万别在实际中使用。
第二种:直接使用影像自带的方法mask()和updateMask()实现,这种方法简单快捷,下面我会通过具体的例子来说明一下如何实现这个功能。
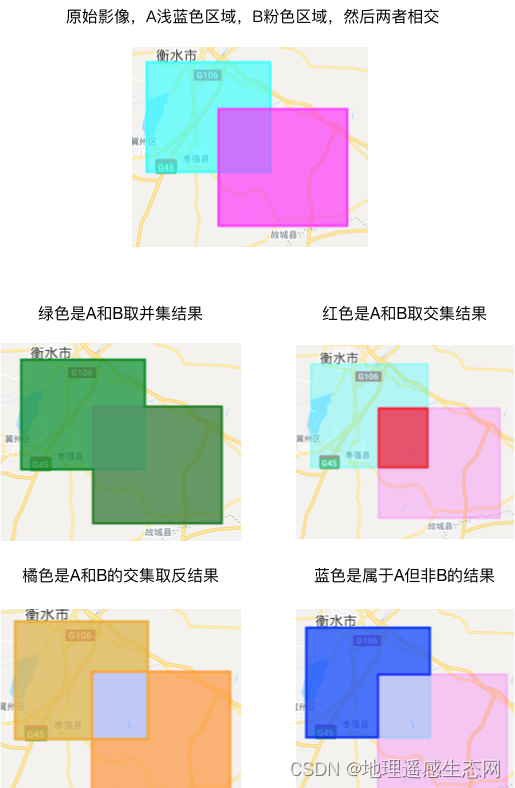
下面通过A:蓝色区域,B:粉色区域,来展示不同叠置分析具体是什么样子,相信大家对下面这个图非常清楚了,就在一一解释,下面通过具体例子来说明影像如何实现这几种情况。
公共代码:
var center = /* color: #0b4a8b */ee.Geometry.Point([115.78080896985244, 37.569622364096226]);
var img = ee.Image("LANDSAT/LC08/C01/T1_SR/LC08_123034_20160504")
.multiply(0.0001)
.normalizedDifference(["B5", "B4"])
.rename("NDVI");
var vis = {
min: 0,
max: 1,
palette: [
'FFFFFF', 'CE7E45', 'DF923D', 'F1B555', 'FCD163', '99B718', '74A901',
'66A000', '529400', '3E8601', '207401', '056201', '004C00', '023B01',
'012E01', '011D01', '011301'
],
};
Map.centerObject(center, 8);
Map.addLayer(img, vis, "NDVI", false);
var roi1 =
ee.Geometry.Polygon(
[[[115.58854822766494, 37.72402725521113],
[115.58854822766494, 37.48467189570746],
[115.92912439953994, 37.48467189570746],
[115.92912439953994, 37.72402725521113]]], null, false),
roi2 =
ee.Geometry.Polygon(
[[[115.78630213391494, 37.62185147647586],
[115.78630213391494, 37.36688853978036],
[116.1406112159462, 37.36688853978036],
[116.1406112159462, 37.62185147647586]]], null, false);
var imgA = img.clip(roi1);
var imgB = img.clip(roi2);
Map.addLayer(roi1, {color: "00ffff"}, "roi1", false);
Map.addLayer(roi2, {color: "ff00ff"}, "roi2", false);
Map.addLayer(imgA, vis, "imgA");
Map.addLayer(imgB, vis, "imgB");
运行结果如下:

1、AB相交,取AB交集
下面的例子计算的就是A和B的交集,然后结果返回的是A的数据结果
-
//A B交集
-
var intersection = imgA.updateMask(imgB.mask());
-
Map.addLayer(intersection, vis, "intersection");
运行结果:

2、AB相交,取AB并集
取并集可以有很多中方式,下面介绍两种常用的方式,一种是利用mask()和updateMask()来做,另外一种方式则是利用构建ImageCollection方式来做。
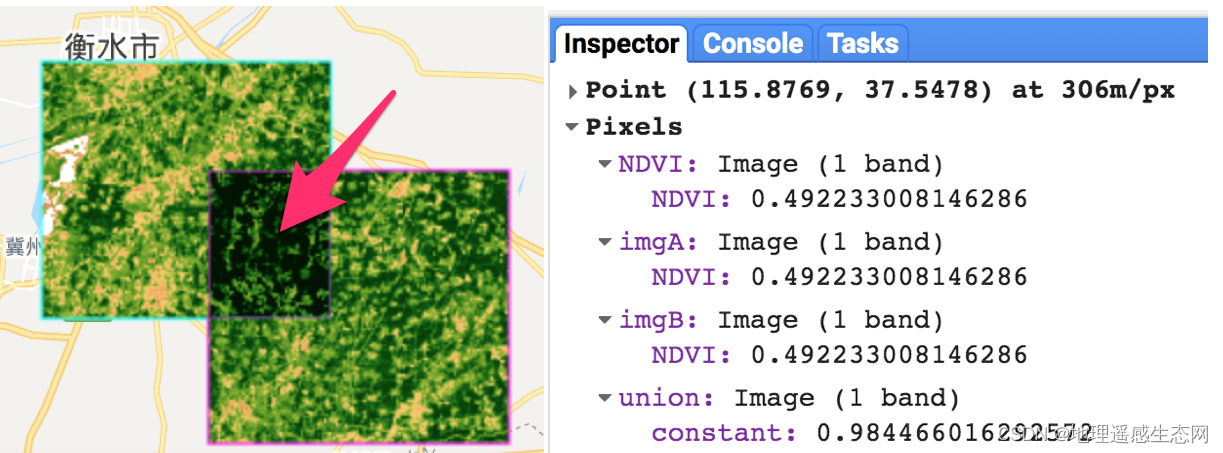
第一种方式,需要说明的是下面这个代码返回相交区域结果是两张影像求和的结果
-
//(1)A B并集
-
var mask = imgA.mask().or(imgB.mask());
-
var baseImg = ee.Image.constant(0)
-
.updateMask(mask);
-
var newImgA = baseImg.where(imgA.mask(), imgA);
-
var newImgB = baseImg.where(imgB.mask(), imgB);
-
var union = newImgA.add(newImgB);
-
Map.addLayer(union, vis, "union");
返回结果如下,点击的是箭头指示的地方,可以看到union的影像是两张影像的和,非相交的地方则是对应自己的结果。
第二种方式,构造ImageCollection,然后计算并集
-
//(2)A B并集
-
var imgAB = ee.ImageCollection.fromImages([imgA, imgB]);
-
var union1 = imgAB.mosaic();
-
Map.addLayer(union1, vis, "union1");
-
var union2 = imgAB.sum();
-
Map.addLayer(union2, vis, "union2");
其中:union1是普通的拼接而得到的结果,每一个像素结果都是唯一的;union2是求和计算拼接的结果,运算结果和第一种方式类似。
3、AB相交,AB的交集取反
计算这个关键就是如何删除交集,主要逻辑就是考虑清楚下面代码mask2就可以,这个是交集的掩膜,那么只要对这个掩膜取反就可以了。
-
// AB的交集取反
-
var mask = imgA.mask().or(imgB.mask());
-
var baseImg = ee.Image.constant(0)
-
.updateMask(mask);
-
var newImgA = baseImg.where(imgA.mask(), imgA);
-
var newImgB = baseImg.where(imgB.mask(), imgB);
-
var mask2 = imgA.mask().and(imgB.mask());
-
var symmetricDifference = newImgA.add(newImgB)
-
.updateMask(mask2.not());
-
Map.addLayer(symmetricDifference, vis, "symmetricDifference");
运行结果如下:
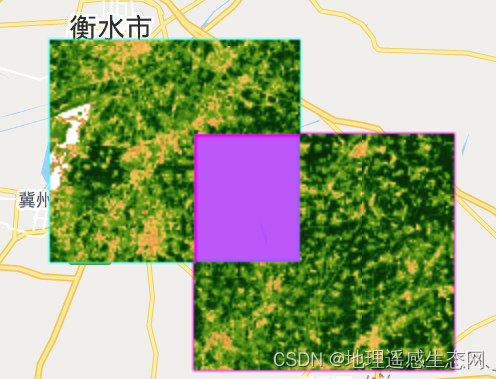
4、AB相交,取属于A但非B
具体代码如下:
-
//取属于A但非B
-
var difference = imgA.updateMask(imgB.mask().not());
-
Map.addLayer(difference, vis, "difference");
运行结果:

总结一下就是影像要实现叠置分析,最关键就是明白影像中的mask()、updateMask()、unmask()等方法使用,通过这些方法结合and、or、not等逻辑判断就可以实现自己想要的各种结果。
来源请引用:地理遥感生态网科学数据注册与出版系统
相关文章:
GEE学习笔记九十一:栅格影像叠置分析
最近发现好多人都在问一个问题,两张影像如何取其相交区域?其实这个问题简单来讲就是多张栅格影像进行叠加分析。在GEE中栅格影像不像矢量数据那样有直接的函数来做数据分析,需要我们自己手动写一些代码来实现这些操作。要实现这个功能有很多方…...
linux系统编程入门
一、搭建环境 1、安装 Linux 系统(虚拟机安装、云服务器) https://releases.ubuntu.com/bionic/ 2、安装 XSHELL、XFTP https://www.netsarang.com/zh/free-for-home-school/ 3、安装 visual studio code https://code.visualstudio.com/ 4、Linu…...

JS代码安全防护常见的方式
文章目录1. 常量的混淆1.1 十六进制字符串1.2 unicode字符串1.3 字符串的ASCII码混淆1.4 字符串常量加密1.5 数值常量加密2. 增加逆向分析难度2.1 数组混淆2.2 数组乱序2.3 花指令2.4 jsfuck3. 代码执行流程的防护3.1 流程平坦化3.2 逗号表达式4. 其他代码防护方案4.1 eval加密…...
PHP(13)HTTP协议
PHP(13)HTTP协议一、HTTP请求1. 请求行2. 请求头3. 请求体二、HTTP响应1. 响应行2. 响应头三、设置HTTP响应四、模拟HTTP请求一、HTTP请求 1. 请求行 请求行独占一行。形式:请求方式 资源路径 协议版本号 GET /index.php HTTP/1.1 2. 请求…...
 用php实现预测气温)
基于支持向量机 (SVM) 用php实现预测气温
Windows 10自带的天气应用有一个基于历史数据预测气温的功能,有一定的参考价值。那么如何去实现这一功能呢?本文采用php进行实现。 使用机器学习方法实现预测当日气温的算法需要涵盖许多的步骤,以下是一种基于支持向量机 (SVM) 的算法的简化…...

MySQL(五)
通过索引进行优化 索引基本知识 索引的优点 1、大大减少了服务器需要扫描的数据量2、帮助服务器避免排序和临时表3、将随机io变成顺序io 索引的用处 1、快速查找匹配WHERE子句的行2、从consideration中消除行,如果可以在多个索引之间进行选择,mysql通常会使用找到…...

Linux常用命令2
目录1.查找find(1)普通用法(2)组合用法2.xargs命令3.管道符4.查看文件内容(1)查看两个文件的差别:diff file1 fille2(2)正序查看文件内容cat(3)倒序查看文件内容tac(4)分页查看文件内容more(5)分页查看文件内容less(6)…...
)
『C/C++养成计划』Visual Studio Code编辑器配置(外观通用型扩展Minmal)
Visual Studio Code编辑器配置(外观&通用型扩展&Minmal)! 文章目录 一. vscode配置外观|通用型扩展1.1. 色彩主题配置扩展(GitHub Theme)1.2. 图标主题扩展(Material Icon Theme)1.3. 代码高亮扩展(better-comments)1.4. 错误警告扩展(error lens)1.5. 执行代码扩展(c…...

设计模式(适配器模式)
设计模式(适配器模式) 第二章 设计模式之适配器模式(Adapter) 一、Adapter模式介绍 适配器模式位于实际情况和需求之间,填补两者之间的差距。 二、示例程序1(使用继承的适配器) 1.示例程序示…...

在基于全志D1s的芒果派麻雀上运行国产开源rt-smart系统
想必RT-Thread系统大家不陌生了,RT-Thread Smart(简称 rt-smart)是基于 RT-Thread 操作系统衍生的新分支,面向带 MMU,中高端应用的芯片,例如 ARM Cortex-A 系列芯片,MIPS 芯片,带 MM…...

【代码随想录训练营】【Day15】第六章|二叉树|层序遍历|226.翻转二叉树|101.对称二叉树
层序遍历 题目详细:LeetCode.102 层序遍历与上一节讲的三种遍历方式有所不同,层序遍历是指按从上到下,从左到右的顺序,逐层地遍历二叉树的节点。 从其节点的遍历顺序上观察,我们可以发现其跟广度优先遍历࿰…...
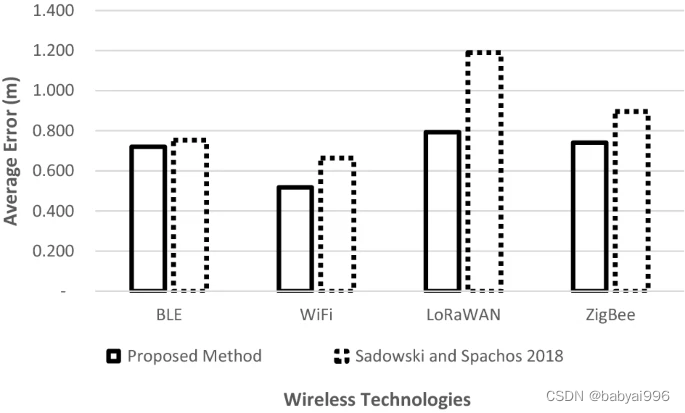
基于圆展开自适应三边测量算法的室内定位
基于圆展开自适应三边测量算法的室内定位 具有无线通信功能的移动设备的日益普及刺激了室内定位服务的增长。室内定位用于实时定位设备位置,方便访问。然而,由于大量障碍物,与室外定位相比,室内定位具有挑战性。全球定位系统非常适…...

使用中断子系统实现对LED灯的控制
中断顶半部:不允许耗时操作 代码流程: 1、基于字符设备驱动的注册(手动/自动) 2、基于设备树文件的自定义完成(myled, myirq) 2、基于GPIO子系统实现led的点亮(流水/测试文件控制) 3、中断子系统操作流程 …...
《爆肝整理》保姆级系列教程python接口自动化(十五)--参数关联接口(详解)
简介 我们用自动化新建任务之后,要想接着对这个新建任务操作,那就需要用参数关联了,新建任务之后会有一个任务的Jenkins-Crumb,获取到这个Jenkins-Crumb,就可以通过传这个任务Jenkins-Crumb继续操作这个新建的任务。 …...

【JDK8】MyBatis源码导入Idea
1.背景 为了更好的将MyBatis的开发设计思想带到日常开发工作,将MyBatis源码导入到本地开发工具中(idea)。我自己在导入的时候碰到几个问题,耽误了自己一点时间,这里我把它们记下来,后边的小伙伴可不要踩我的坑。 Java版本&#x…...

三层交换机DHCP中继
关于中继,我们需要有一个对比。正常情况下我们是不是需要配置单臂路由然后开启DHCP地址池,然就设置网段网关以及DNS。这样的话考验 的其实是命令功底。但是为了方便,我们 可以添加服务器,将这个服务给到服务器去配置,这…...
C++之RALL机制
RALL是Resource acquisition is initialization的缩写,意思是“资源获取即初始化”,其核心思想是利用C对象生命周期的概念来控制程序的资源。它的技术原理很简单,如果希望对某个重要资源进行跟踪,那么创建一个对象,并将…...
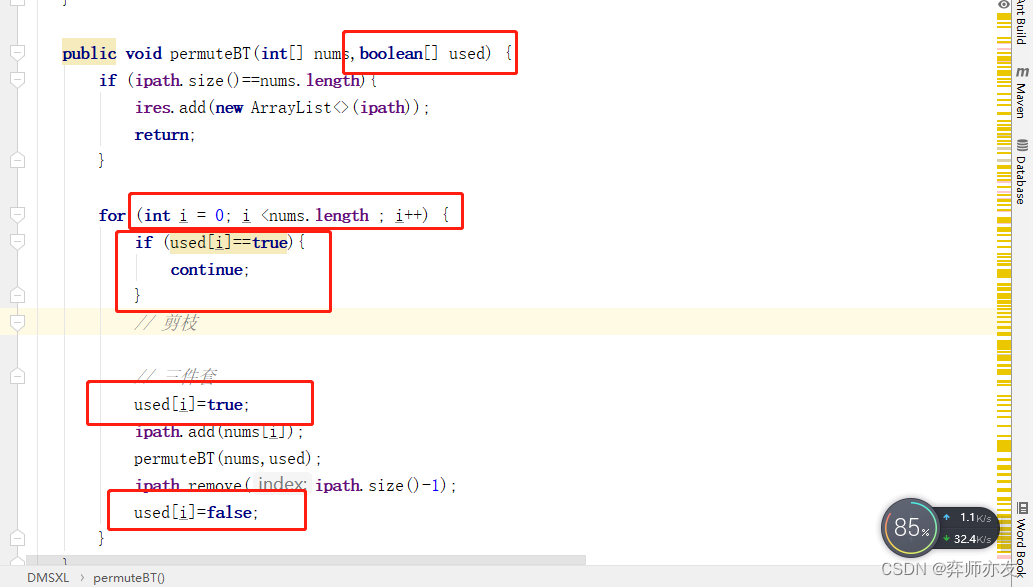
回溯算法章末总结
组合问题的特点 (1)abba 选中a之后,就不再选了 (2)找出所有的组合 (长度可以不相等) 组合问题模板 做回溯题步骤 (0)判断问题类型 (1)树状图 …...

【SpringBoot】为异步任务规划线程池
一、线程池的作用 防止资源占用无限的扩张调用过程省去资源的创建和销毁所占用的时间 在上一节中,我们的一个异步任务打开了一个线程,完成后销毁。在高并发环境下,不断的分配新资源,可能导致系统资源耗尽。所以为了避免这个问题…...

SAP ABAP 输出结果带有空格
方法一: 字段内容前增加空格,需使用全角空格,使用半角空格时,ALV显示无效,空格无法显示, 全角与半角的切换方法:shift空格切换, 如下的标记部分,要想通过ALV显示空格&…...
)
用Python和罗技驱动DLL实现《穿越火线》红名自动检测与开枪(保姆级避坑指南)
Python游戏自动化开发实战:基于颜色识别的智能交互系统设计 在数字娱乐领域,自动化技术正悄然改变着用户的交互体验。本文将深入探讨如何利用Python构建一套安全、高效的屏幕元素识别与自动化交互系统,重点解析颜色识别算法的核心实现与硬件接…...

MicMute:3秒掌握麦克风静音控制,告别会议尴尬时刻
MicMute:3秒掌握麦克风静音控制,告别会议尴尬时刻 【免费下载链接】MicMute Mute default mic clicking tray icon or shortcut 项目地址: https://gitcode.com/gh_mirrors/mi/MicMute 你是否曾在视频会议中因忘记静音而暴露尴尬的聊天背景声&…...
)
2023B卷,跳格子(1)
👨⚕️ 主页: gis分享者 👨⚕️ 感谢各位大佬 点赞👍 收藏⭐ 留言📝 加关注✅! 👨⚕️ 收录于专栏:华为OD面试 文章目录 一、🍀前言 1.1 ☘️题目详情 1.2 ☘️参考解题答案 一、🍀前言 2023B卷,跳格子(1) 。 1.1 ☘️题目详情 题目: 小明和朋友…...

Windows电脑运行安卓应用终极指南:APK安装器完整教程
Windows电脑运行安卓应用终极指南:APK安装器完整教程 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 你是否曾经想过,在Windows电脑上直接运行安…...

点云配准避坑指南:从理论到代码,详解点到面ICP中法线计算的‘坑’与线性近似的前提
点云配准实战:深入解析点到面ICP算法中的法线计算与线性近似陷阱 在三维重建和机器人定位领域,点云配准技术扮演着关键角色。当我们面对两个部分重叠的点云数据集时,如何精确地将它们对齐成为一个统一坐标系下的完整模型?迭代最近…...

Windows热键冲突终结者:3步精准定位占用进程的智能方案
Windows热键冲突终结者:3步精准定位占用进程的智能方案 【免费下载链接】hotkey-detective A small program for investigating stolen key combinations under Windows 7 and later. 项目地址: https://gitcode.com/gh_mirrors/ho/hotkey-detective 你是否曾…...

FreeRTOS优先级设置踩坑实录:为什么你的高优先级任务跑不起来?
FreeRTOS优先级设置实战指南:从原理到调试的完整解决方案 当你第一次在FreeRTOS中创建多个任务并设置不同优先级时,可能会遇到一个令人困惑的现象:明明设置了高优先级任务,但系统运行时低优先级任务却先执行。这种情况在从其他RT…...

英雄联盟录像编辑完整教程:5分钟掌握League Director专业工具
英雄联盟录像编辑完整教程:5分钟掌握League Director专业工具 【免费下载链接】leaguedirector League Director is a tool for staging and recording videos from League of Legends replays 项目地址: https://gitcode.com/gh_mirrors/le/leaguedirector …...

第一卷第4章:接口而非实现编程
第一卷第4章:接口而非实现编程 目录介绍 00.先回答上篇思考题 0.1 上篇遗留三道题 0.2 云迁移6万行代码 0.3 五次反转补锅 0.4 灵魂五连问 01.从一个搬迁切入 1.1 上云搬迁案例...

慕尼黑电子展深度攻略:从技术侦察到资源对接的实战指南
1. 展会项目概述与核心价值解析又到了一年一度的行业盛会密集期,对于身处电子、嵌入式、物联网这些硬科技赛道的从业者来说,参加一场高质量的线下展会,其价值远不止是“逛一逛”那么简单。它更像是一次集中的行业体检、一次高效的技术社交和一…...