【EasyX】实时时钟
目录
- 实时时钟
- 1. 绘制静态秒针
- 2. 秒针的转动
- 3. 根据实际时间转动
- 4. 添加时针和分针
- 5. 添加表盘刻度
实时时钟
本博客介绍利用EasyX实现一个实时钟表的小程序,同时学习时间函数的使用。
本文源码可从github获取
1. 绘制静态秒针
第一步定义钟表的中心坐标center,它也是秒针的起点;定义秒针的长度secondLength、秒针的终点坐标secondEnd;利用setlinestyle函数设定线的型号和宽度,调用line函数绘制秒针。
#include <graphics.h>
#include <conio.h>
#include <cmath>using namespace std;struct Point
{int x;int y;
};#define High 480
#define Width 640int main(void)
{initgraph(Width, High);Point center, secondEnd;center.x = Width / 2;center.y = High / 2;int sencondLenth = Width / 5;secondEnd.x = center.x + sencondLenth;secondEnd.y = center.y;// 画秒针setlinestyle(PS_SOLID, 2); // 画实线,宽度为2个像素setcolor(WHITE);line(center.x, center.y, secondEnd.x, secondEnd.y);_getch();closegraph();return 0;
}
2. 秒针的转动
第二步实现秒针的转动,定义secondAngle为秒针对应的角度,利用三角几何知识求出秒针的终点坐标:
secondEnd.x = center.x + secondLenth * sin(secondAngle);
secondEnd.y = center.y - secondLenth * cos(secondAngle);
让角度循环变化,则实现了秒针转动的动画效果。
#include <graphics.h>
#include <conio.h>
#include <cmath>using namespace std;struct Point
{int x;int y;
};#define High 480
#define Width 640
#define PI 3.1415926int main(void)
{initgraph(Width, High);Point center, secondEnd;center.x = Width / 2;center.y = High / 2;int secondLenth = Width / 5;secondEnd.x = center.x + secondLenth;secondEnd.y = center.y;double secondAngle = 1.0; while (true){// 由角度决定终点坐标secondEnd.x = center.x + secondLenth * sin(secondAngle);secondEnd.y = center.y - secondLenth * cos(secondAngle);// 画秒针setlinestyle(PS_SOLID, 2); // 画实线,宽度为2个像素setcolor(WHITE);line(center.x, center.y, secondEnd.x, secondEnd.y);Sleep(100);setcolor(BLACK);line(center.x, center.y, secondEnd.x, secondEnd.y);// 秒针角度变化secondAngle = secondAngle * 2 * PI / 60 + 1;}_getch();closegraph();return 0;
}
3. 根据实际时间转动
第三步定义系统变量(SYSTEMTIME ti),通过GetLocalTime(&ti)获取当前时间,秒针的角度由实际时间决定,即secondAngle = ti.wSecond * 2 * PI/60。
#include <graphics.h>
#include <conio.h>
#include <cmath>using namespace std;struct Point
{int x;int y;
};#define High 480
#define Width 640
#define PI 3.1415926int main(void)
{initgraph(Width, High);Point center, secondEnd;center.x = Width / 2;center.y = High / 2;int secondLenth = Width / 5;secondEnd.x = center.x + secondLenth;secondEnd.y = center.y;double secondAngle;SYSTEMTIME ti;while (true){GetLocalTime(&ti);secondAngle = ti.wSecond * 2 * PI / 60;// 由角度决定终点坐标secondEnd.x = center.x + secondLenth * sin(secondAngle);secondEnd.y = center.y - secondLenth * cos(secondAngle);// 画秒针setlinestyle(PS_SOLID, 2); // 画实线,宽度为2个像素setcolor(WHITE);line(center.x, center.y, secondEnd.x, secondEnd.y);Sleep(100);setcolor(BLACK);line(center.x, center.y, secondEnd.x, secondEnd.y);}_getch();closegraph();return 0;
}

4. 添加时针和分针
第四步添加时针、分针,和秒针变化相比,他们的长度、宽度、颜色、旋转速度有一定的不同。
#include <graphics.h>
#include <conio.h>
#include <cmath>using namespace std;struct Point
{int x;int y;
};#define High 480
#define Width 640
#define PI 3.1415926int main(void)
{initgraph(Width, High);Point center, secondEnd, minuteEnd, hourEnd;center.x = Width / 2;center.y = High / 2;int secondLenth = Width / 5;int minuteLenth = Width / 6;int hourLenth = Width / 8;double secondAngle;double minuteAngle;double hourAngle;SYSTEMTIME ti;while (true){GetLocalTime(&ti);secondAngle = ti.wSecond * 2 * PI / 60;minuteAngle = ti.wMinute * 2 * PI / 60;hourAngle = (ti.wHour % 12) * 2 * PI / 12;// 由角度决定秒针终点坐标secondEnd.x = center.x + secondLenth * sin(secondAngle);secondEnd.y = center.y - secondLenth * cos(secondAngle);// 由角度决定分针终点坐标minuteEnd.x = center.x + minuteLenth * sin(minuteAngle);minuteEnd.y = center.y - minuteLenth * cos(minuteAngle);// 由角度决定时针终点坐标hourEnd.x = center.x + hourLenth * sin(hourAngle);hourEnd.y = center.y - hourLenth * cos(hourAngle);// 画秒针setlinestyle(PS_SOLID, 2); // 画实线,宽度为2个像素setcolor(WHITE);line(center.x, center.y, secondEnd.x, secondEnd.y);// 画分针setlinestyle(PS_SOLID, 4); // 画实线,宽度为4个像素setcolor(BLUE);line(center.x, center.y, minuteEnd.x, minuteEnd.y);// 画时针setlinestyle(PS_SOLID, 6); // 画实线,宽度为6个像素setcolor(RED);line(center.x, center.y, hourEnd.x, hourEnd.y);Sleep(10); // 延时10毫秒setcolor(BLACK);setlinestyle(PS_SOLID, 2); // 画实线,宽度为2个像素line(center.x, center.y, secondEnd.x, secondEnd.y);setlinestyle(PS_SOLID, 4); // 画实线,宽度为4个像素line(center.x, center.y, minuteEnd.x, minuteEnd.y);setlinestyle(PS_SOLID, 6); // 画实线,宽度为6个像素line(center.x, center.y, hourEnd.x, hourEnd.y);}int c = _getch();closegraph();return 0;
}
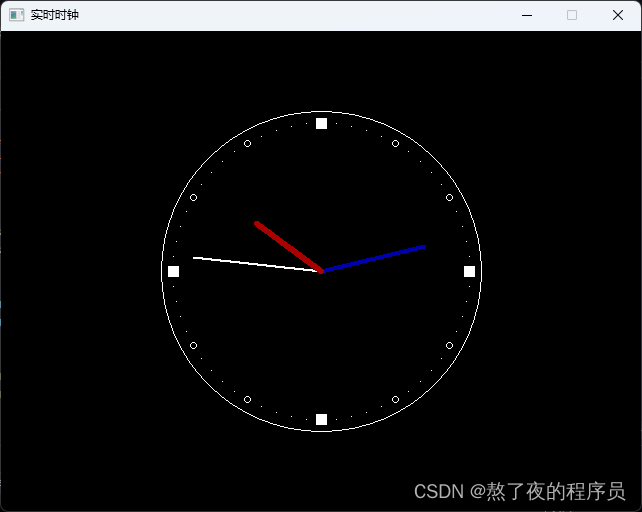
5. 添加表盘刻度
第五步绘制表盘,并可以利用outtextxy()函数在画面中输出文字,为了让时针、分针的转动更自然,对求解时针、分针的角度进行了改进。
#include <graphics.h>
#include <conio.h>
#include <cmath>using namespace std;struct Point
{int x;int y;
};#define High 480
#define Width 640
#define PI 3.1415926int main(void)
{initgraph(Width, High);Point center, secondEnd, minuteEnd, hourEnd;center.x = Width / 2;center.y = High / 2;int secondLenth = Width / 5;int minuteLenth = Width / 6;int hourLenth = Width / 8;double secondAngle;double minuteAngle;double hourAngle;SYSTEMTIME ti;BeginBatchDraw();while (true){// 绘制一个简单的表盘setlinestyle(PS_SOLID, 1); // 画实线,宽度为1个像素setcolor(WHITE);circle(center.x, center.y, Width / 4);// 画刻度int x, y, i;for (i = 0; i < 60; i++){x = center.x + int(Width/4.3*sin(PI*2*i/60));y = center.y - int(Width/4.3*cos(PI*2*i/60));if (i % 15 == 0) {bar(x - 5, y -5, x + 5, y + 5);}else if (i % 5 == 0) {circle(x, y, 3);}else {putpixel(x, y, WHITE);}}GetLocalTime(&ti);secondAngle = ti.wSecond * 2 * PI / 60;minuteAngle = ti.wMinute * 2 * PI / 60 + secondAngle / 60;hourAngle = ti.wHour*2*PI/12 + minuteAngle / 12;// 由角度决定秒针终点坐标secondEnd.x = center.x + secondLenth * sin(secondAngle);secondEnd.y = center.y - secondLenth * cos(secondAngle);// 由角度决定分针终点坐标minuteEnd.x = center.x + minuteLenth * sin(minuteAngle);minuteEnd.y = center.y - minuteLenth * cos(minuteAngle);// 由角度决定时针终点坐标hourEnd.x = center.x + hourLenth * sin(hourAngle);hourEnd.y = center.y - hourLenth * cos(hourAngle);// 画秒针setlinestyle(PS_SOLID, 2); // 画实线,宽度为2个像素setcolor(WHITE);line(center.x, center.y, secondEnd.x, secondEnd.y);// 画分针setlinestyle(PS_SOLID, 4); // 画实线,宽度为4个像素setcolor(BLUE);line(center.x, center.y, minuteEnd.x, minuteEnd.y);// 画时针setlinestyle(PS_SOLID, 6); // 画实线,宽度为6个像素setcolor(RED);line(center.x, center.y, hourEnd.x, hourEnd.y);FlushBatchDraw();Sleep(10); // 延时10毫秒setcolor(BLACK);setlinestyle(PS_SOLID, 2); // 画实线,宽度为2个像素line(center.x, center.y, secondEnd.x, secondEnd.y);setlinestyle(PS_SOLID, 4); // 画实线,宽度为4个像素line(center.x, center.y, minuteEnd.x, minuteEnd.y);setlinestyle(PS_SOLID, 6); // 画实线,宽度为6个像素line(center.x, center.y, hourEnd.x, hourEnd.y);}EndBatchDraw();int c = _getch();closegraph();return 0;
}
至此完成。
相关文章:
【EasyX】实时时钟
目录 实时时钟1. 绘制静态秒针2. 秒针的转动3. 根据实际时间转动4. 添加时针和分针5. 添加表盘刻度 实时时钟 本博客介绍利用EasyX实现一个实时钟表的小程序,同时学习时间函数的使用。 本文源码可从github获取 1. 绘制静态秒针 第一步定义钟表的中心坐标center&a…...

基于XC7Z100的PCIe采集卡(GMSL FMC采集卡)
GMSL 图像采集卡 特性 ● PCIe Gen2.0 X8 总线; ● 支持V4L2调用; ● 1路CAN接口; ● 6路/12路 GMSL1/2摄像头输入,最高可达8MP; ● 2路可定义相机同步触发输入/输出; 优势 ● 采用PCIe主卡与FMC子…...
Kibana:使用 Kibana 自带数据进行可视化(一)
在今天的练习中,我们将使用 Kibana 自带的数据来进行一些可视化的展示。希望对刚开始使用 Kibana 的用户有所帮助。 前提条件 如果你还没有安装好自己的 Elastic Stack,你可以参考如下的视频来开启 Elastic Stack 并进行下面的练习。你可以开通阿里云检…...
MySQL数据库基础 07
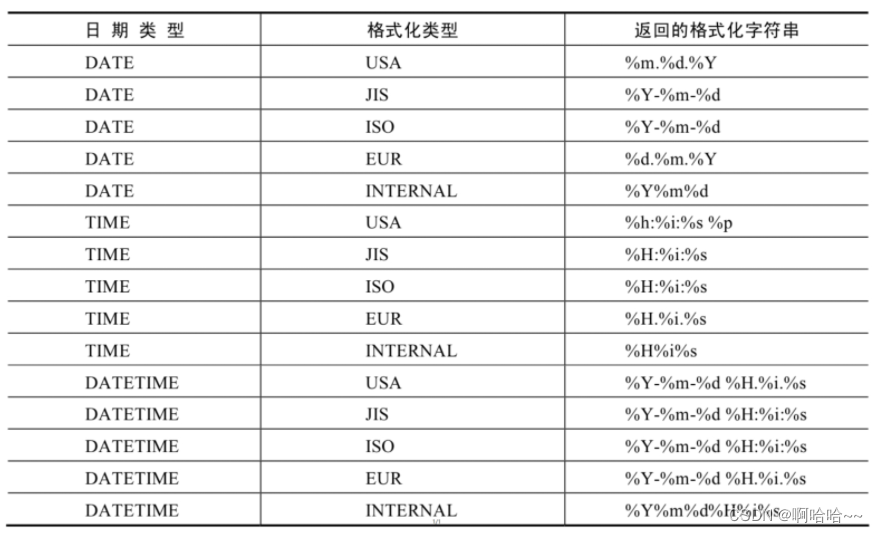
第七章 单行函数 1. 函数的理解1.1 什么是函数1.2 不同DBMS函数的差异1.3 MySQL的内置函数及分类 2. 数值函数2.1 基本函数2.2 角度与弧度互换函数2.3 三角函数2.4 指数与对数2.5 进制间的转换 3. 字符串函数4. 日期和时间函数4.1 获取日期、时间 4.2 日期与时间戳的转换 4.3 获…...

JVM | JVM垃圾回收
JVM | JVM垃圾回收 1、堆空间的基本结构2、内存分配和回收原则2.1、对象优先在 Eden 区分配2.2、大对象直接进入老年代2.3、长期存活的对象将进入老年代2.4、主要进行 gc 的区域2.5、空间分配担保3、死亡对象判断方法3.1、引用计数法3.2、可达性分析算法3.3、引用类型总结3.4、…...

avive零头撸矿
Avive 是一个透明的、自下而上替代自上而下的多元网络,旨在克服当前生态系统的局限性,实现去中心化社会。 aVive:一个基于 SBT 和市场的 deSoc,它使 dapps 能够与分散的位置 oracle 和 SBT 关系进行互操作。您的主权社交网络元宇宙…...

openGauss5.0之学习环境 Docker安装
文章目录 0.前言1. 准备软硬件安装环境1.1 软硬件环境要求1.2 修改操作系统配置1.2.1 关闭操作系统防火墙 1.3 设置字符集参数1.4 设置时区和时间(可选)关闭swap交换内存1.5 关闭RemoveIPC1.6 关闭HISTORY记录 2. 容器安装2. 1支持的架构和操作系统版本2…...

数据可视化大屏人员停留系统的开发实录(默认加载条件筛选、单击加载、自动刷新加载、异步加载数据)
项目需求 录入进入房间的相关数据;从进入时间开始计时,计算滞留房间的时间;定时刷新数据,超过30分钟的人数,进行红色告警; 实现流程 为了完整地实现上述需求,我们可以按照以下步骤开发&#…...

【Linux】-关于调试器gdb的介绍和使用
作者:小树苗渴望变成参天大树 作者宣言:认真写好每一篇博客 作者gitee:gitee 如 果 你 喜 欢 作 者 的 文 章 ,就 给 作 者 点 点 关 注 吧! 文章目录 前言一、Linux中的debug和release二、gdb的使用**1.进入调试****2.显示代码*…...

项目开发经验
hadoop 1.namenode中有专门的工作线程池用于处理与datanode的心跳信号 dfs.namenode.handler.count20 * log2(Clust 2.编辑日志存储路径 dfs.namenode.edits.dir 设置与镜像文件存储路径 dfs.namenode分开存放,可以达到提高并发 3.yarn参数调优,单个服…...

STM32——05-按键、时钟控制、中断复位 点亮LED灯
如何点亮一颗LED灯 编程实现点灯 常用的 GPIO HAL 库函数: void HAL_GPIO_Init ( GPIO_TypeDef * GPIOx , GPIO_InitTypeDef * GPIO_Init ); void HAL_GPIO_WritePin ( GPIO_TypeDef * GPIOx , uint16_t GPIO_Pin , GPIO_PinState PinState ); void HAL_GPIO_Togg…...

VBA下载二进制文件,文本读写
这里使用了vba如下两个对象: Microsoft.XMLHTTP:文件读写,可读写二进制,可指定编码,对于utf-8编码文本文件使用FSO的TextStream对象打开,读取到的内容可能会出现乱码,可以使用该对象打开;前期绑定添加引用…...

MongoDB结合Robo 3T 1.4.3的简单操作
MongoDB的简单操作结合Robo 3T 1.4.3工具进行查询。 常用的正则表达式 /* 29 */ 正则表达式 /\* [0-9]* \*/ "_id" : ObjectId("5f3d05cdfd2aa9a8a7"), 正则表达式 \"([^\"]*_id)\".*, 使用方法:查询结果去掉注释和不需要…...

【学习笔记】[AGC048D] Pocky Game
这是一个非平等博弈。但是只要求你判断胜负,本身也不是一道结论题,所以可以用 D P DP DP来解决。 结论:第一堆石子剩的越多,先手玩家获胜的概率越大。这直接引出了一个非常感性的结论:每次取石子时要么取一堆…...
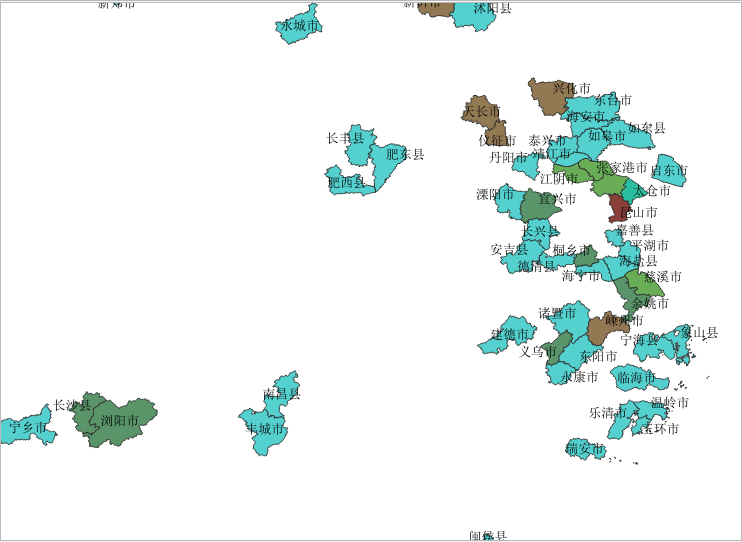
Qgis中进行Shp和Excel属性连接实现百强县公共预算空间分析
前言 在之前的博文中,将2022的全国百强县一般公共预算收入的数据下载到了本地,博客原文地址:一种使用Java的快速将Web中表格转换成Excel的方法。对于不关注时空位置关系的一般分析,到此也就基本够用了。但是,如果站在全…...

ES6 新增的循环方法
在 ES6(ECMAScript 2015)中,新增了一些循环方法,这些方法可以帮助我们更方便地遍历数组、字符串、Set、Map 等数据结构。本文将介绍一些常用的 ES6 循环方法。 for…of 循环 for…of 循环是一种遍历可迭代对象的方法,…...

移动端事件300ms延迟解决
有移动端与PC端的项目开发,那么移动端和PC端开发上是存在差异的,比如 click 事件的300ms 延迟,即移动Web页面上的click事件响应都要慢上300ms,移动设备访问Web页面时往往需要 “双击” 或者 “捏开” 来放大页面看清页面的具体内容…...
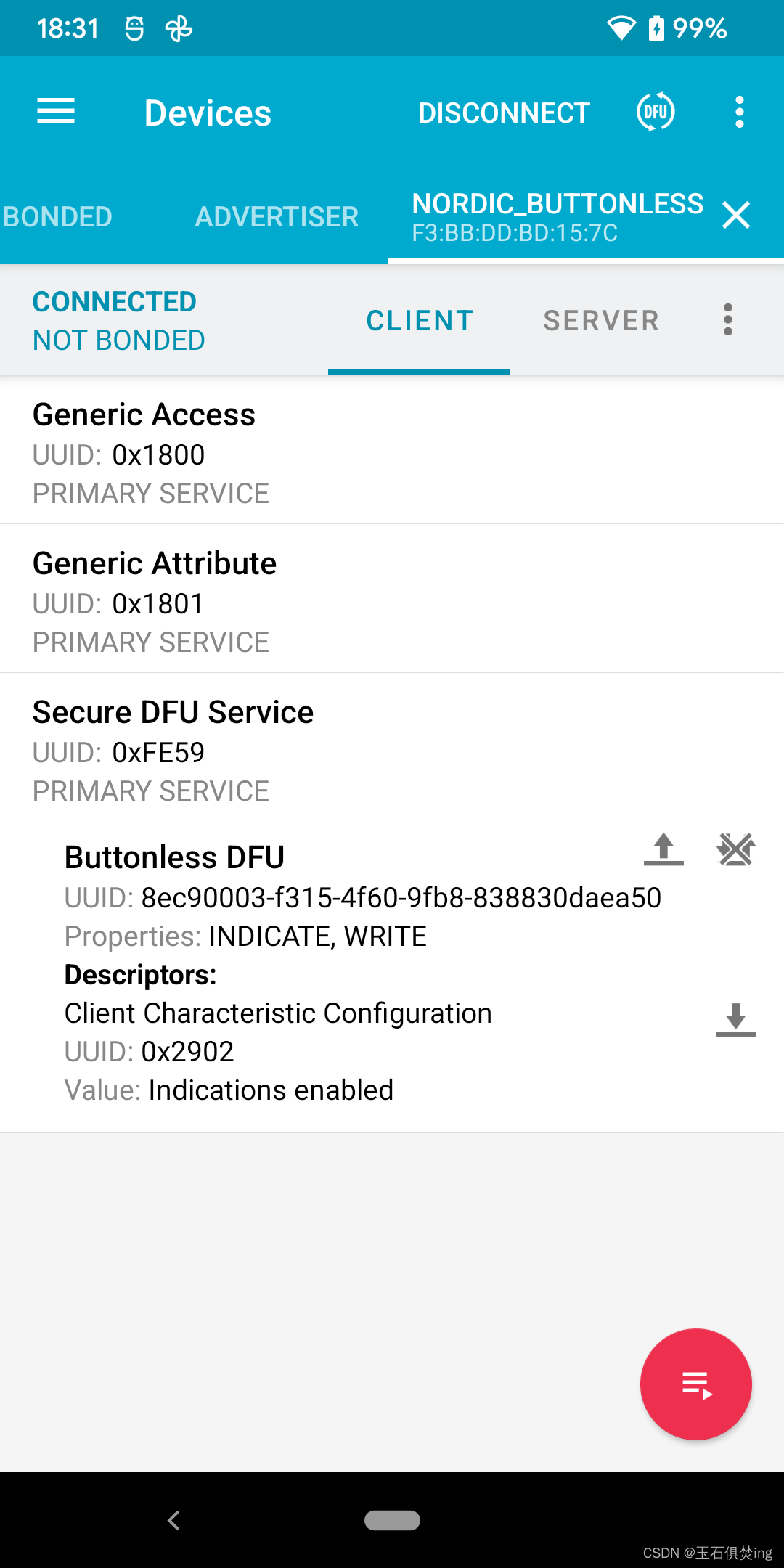
NRF52832的DFU
开发环境: Winsodw:10 nRF5_SDK:17.1.0 1 工具安装 1.1 gcc-arm-none-eabi Downloads | GNU Arm Embedded Toolchain Downloads – Arm Developer 下载“gcc-arm-none-eabi-10.3-2021.10-win32.exe”,接提示安装。注意安装完…...
开源WebRTC库放大器模式在采集桌面图像时遇到的DPI缩放与内存泄漏问题排查
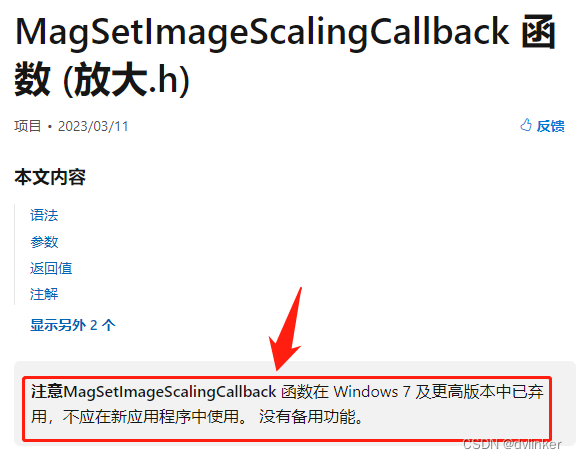
目录 1、在非100%的显示比例下放大器采集到的桌面图像不全问题 1.1、通过manifest文件禁止系统对软件进行缩放 1.2、调用SetThreadDpiAwarenessContext函数,禁止系统对目标线程中的窗口进行缩放 1.3、使用winver命令查看Windows的年月版本 2、使用放大器模式遇…...

敲黑板!java反射机制和原理
获取Class对象:首先,你需要获取表示要操作的类的Class对象。可以使用以下三种方式之一来获取Class对象: Class.forName()方法:使用类的全限定名获取Class对象,例如:Class<? Class<?> clazz MyC…...

KubeSphere 容器平台高可用:环境搭建与可视化操作指南
Linux_k8s篇 欢迎来到Linux的世界,看笔记好好学多敲多打,每个人都是大神! 题目:KubeSphere 容器平台高可用:环境搭建与可视化操作指南 版本号: 1.0,0 作者: 老王要学习 日期: 2025.06.05 适用环境: Ubuntu22 文档说…...
【第二十一章 SDIO接口(SDIO)】
第二十一章 SDIO接口 目录 第二十一章 SDIO接口(SDIO) 1 SDIO 主要功能 2 SDIO 总线拓扑 3 SDIO 功能描述 3.1 SDIO 适配器 3.2 SDIOAHB 接口 4 卡功能描述 4.1 卡识别模式 4.2 卡复位 4.3 操作电压范围确认 4.4 卡识别过程 4.5 写数据块 4.6 读数据块 4.7 数据流…...
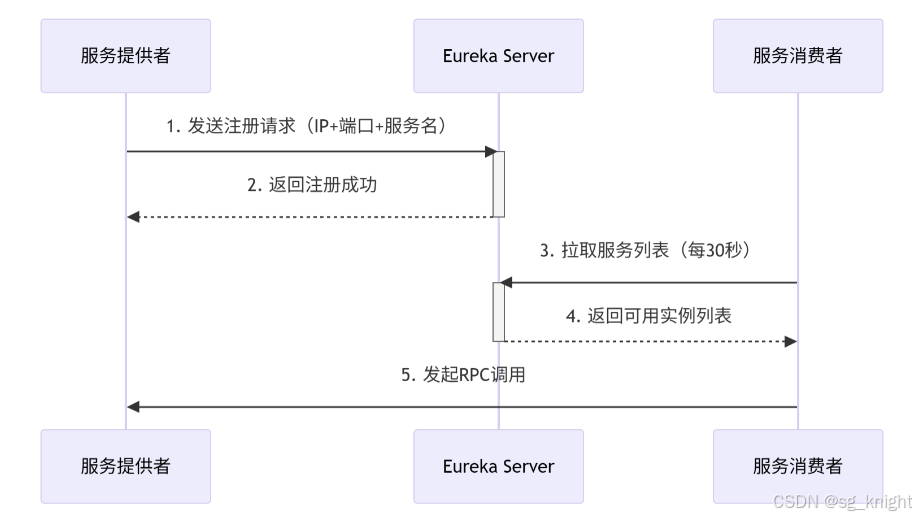
Springcloud:Eureka 高可用集群搭建实战(服务注册与发现的底层原理与避坑指南)
引言:为什么 Eureka 依然是存量系统的核心? 尽管 Nacos 等新注册中心崛起,但金融、电力等保守行业仍有大量系统运行在 Eureka 上。理解其高可用设计与自我保护机制,是保障分布式系统稳定的必修课。本文将手把手带你搭建生产级 Eur…...

图表类系列各种样式PPT模版分享
图标图表系列PPT模版,柱状图PPT模版,线状图PPT模版,折线图PPT模版,饼状图PPT模版,雷达图PPT模版,树状图PPT模版 图表类系列各种样式PPT模版分享:图表系列PPT模板https://pan.quark.cn/s/20d40aa…...
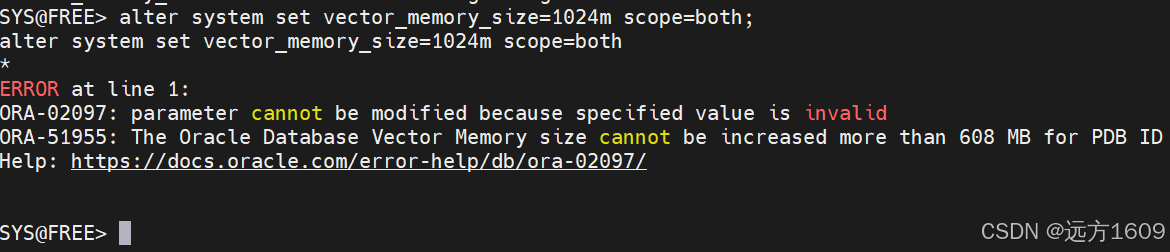
10-Oracle 23 ai Vector Search 概述和参数
一、Oracle AI Vector Search 概述 企业和个人都在尝试各种AI,使用客户端或是内部自己搭建集成大模型的终端,加速与大型语言模型(LLM)的结合,同时使用检索增强生成(Retrieval Augmented Generation &#…...
【C++特殊工具与技术】优化内存分配(一):C++中的内存分配
目录 一、C 内存的基本概念 1.1 内存的物理与逻辑结构 1.2 C 程序的内存区域划分 二、栈内存分配 2.1 栈内存的特点 2.2 栈内存分配示例 三、堆内存分配 3.1 new和delete操作符 4.2 内存泄漏与悬空指针问题 4.3 new和delete的重载 四、智能指针…...

Kafka主题运维全指南:从基础配置到故障处理
#作者:张桐瑞 文章目录 主题日常管理1. 修改主题分区。2. 修改主题级别参数。3. 变更副本数。4. 修改主题限速。5.主题分区迁移。6. 常见主题错误处理常见错误1:主题删除失败。常见错误2:__consumer_offsets占用太多的磁盘。 主题日常管理 …...

离线语音识别方案分析
随着人工智能技术的不断发展,语音识别技术也得到了广泛的应用,从智能家居到车载系统,语音识别正在改变我们与设备的交互方式。尤其是离线语音识别,由于其在没有网络连接的情况下仍然能提供稳定、准确的语音处理能力,广…...

深度剖析 DeepSeek 开源模型部署与应用:策略、权衡与未来走向
在人工智能技术呈指数级发展的当下,大模型已然成为推动各行业变革的核心驱动力。DeepSeek 开源模型以其卓越的性能和灵活的开源特性,吸引了众多企业与开发者的目光。如何高效且合理地部署与运用 DeepSeek 模型,成为释放其巨大潜力的关键所在&…...
第一篇:Liunx环境下搭建PaddlePaddle 3.0基础环境(Liunx Centos8.5安装Python3.10+pip3.10)
第一篇:Liunx环境下搭建PaddlePaddle 3.0基础环境(Liunx Centos8.5安装Python3.10pip3.10) 一:前言二:安装编译依赖二:安装Python3.10三:安装PIP3.10四:安装Paddlepaddle基础框架4.1…...