基于 VPX 总线的工件台运动控制系统研究与开发-DSP+FPGA硬件架构(一)





相关文章:
基于 VPX 总线的工件台运动控制系统研究与开发-DSP+FPGA硬件架构(一)
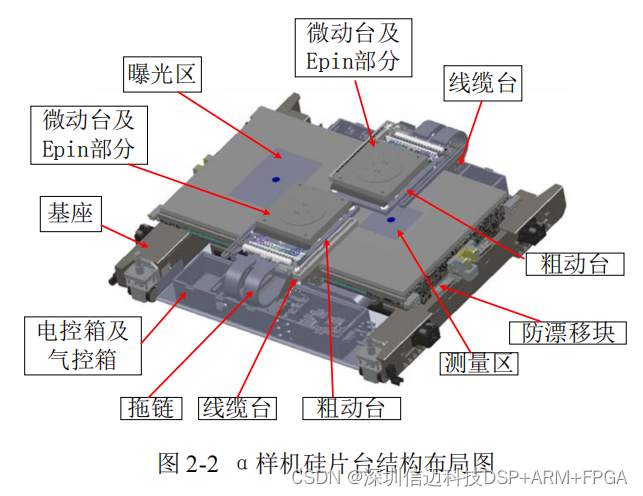
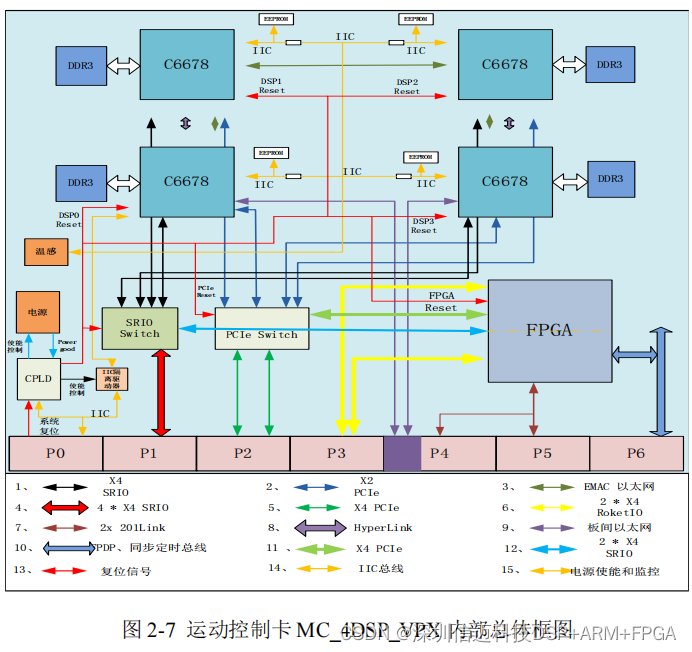
作为光刻机核心单元之一,超精密工件台主要负责实现快速扫描、上下片、精密定位、调平调焦等功能。目前,较为成熟的方案大多采用 VME 并行总线架构来建立超精密工件台控制系统,由于随着系统性能要求的提升,VME 总线以及相应的处理器…...

Android 9.0 根据包名授予app所需的权限
1.概述 在9.0的系统rom产品定制化开发中,在对系统app首次启动默认是会弹出授权的弹窗的,但是对于产品来说会显示的有些麻烦,对产品体验度也不是很好,所以在进行产品开发的时候,默认要求对一些app根据包名授予权限,这样就不会弹出授权的窗口了默认就有权限了,接下来就来实…...

如何将Python包发布到PyPI上,使用pip安装自己的库
如何发布自己的第三方库1. PyPi的用途2.Python包发布步骤2.1 创建目录结构2.2 准备文件1、README.rst2、LICENSE.txt,创建许可证3、setup.py文件4.克隆setup.py仓库(推荐)2.3 编写核心代码2.4 生成分发档案2.5 发布包到PyPi3.验证发布PYPI成功…...
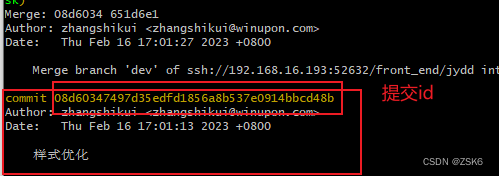
【Git】git常用命令总结
简言 git是一个开源的分布式版本控制系统,可以有效、高速地处理从很小到非常大的项目版本管理。 里面有很多常用的命令语法,在此做一个常用命令总结记录,以备不时之需。 命令总结 由于git是基于linux开发的工具,所以有个特点&a…...
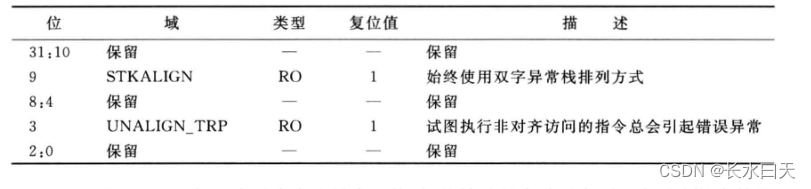
Cortex-M0中断控制和系统控制
目录1.NVIC和系统控制块特性2.中断使能和清除使能3.中断挂起和清除挂起4.中断优先级5.中断控制的通用汇编代码使能和禁止中断设置和清除中断挂起状态设置中断优先级6.异常屏蔽寄存器(PRIMASK)7.中断输入和挂起行为8.中断等待9.系统异常的控制寄存器10.系…...
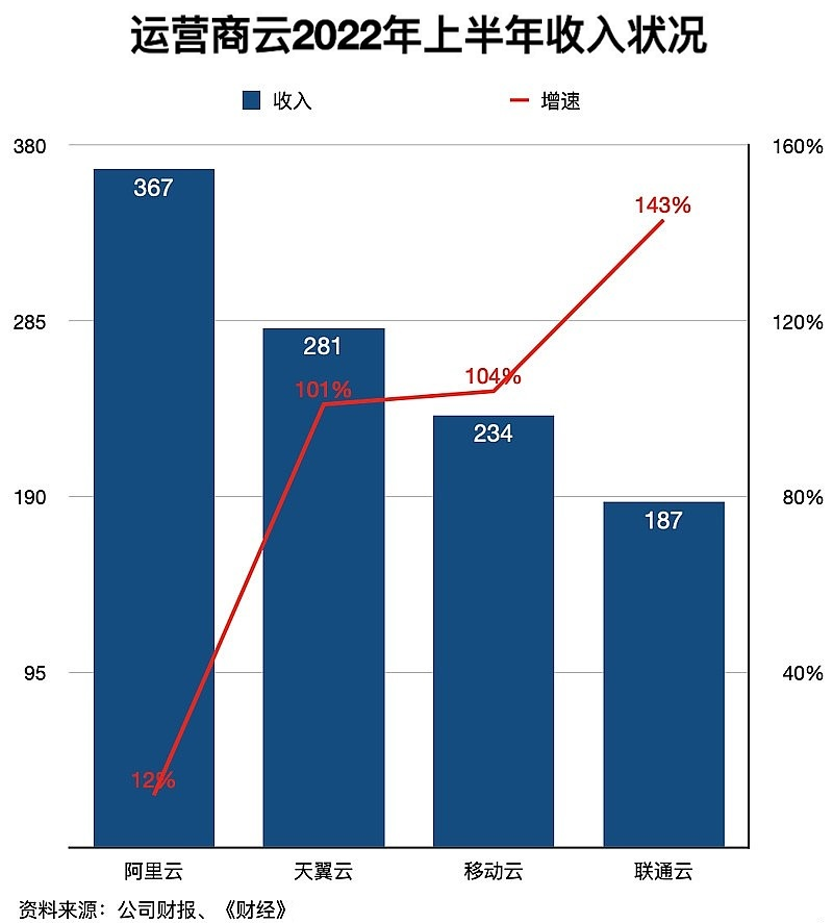
科技云报道:2023,云计算的风向变了
科技云报道原创。 2022,是云计算的“分水岭”之年。 与前两年的火热相比,2022年云计算行业实属不太好过:阿里云一季度营收增速创出历史新低,腾讯云的市场份额也被后来者华为云反超,沦为第三。 在此情形下,…...

工程管理系统源码-专注项目数字化管理-工程管理
工程项目各模块及其功能点清单 一、系统管理 1、数据字典:实现对数据字典标签的增删改查操作 2、编码管理:实现对系统编码的增删改查操作 3、用户管理:管理和查看用户角色 4、菜单管理:实现对系统菜单的增删改查操…...

Nacos详细使用操作文档(图文详细)
文章目录Nacos详细使用操作文档(图文详细)1、安装2、Nacos作为注册中心2.1、Nacos服务注册【ICRMS】2.2、Nacos 服务调用2.2.1、Feign 远程调用【Personnel】2.2.2)、RestTemplateRibbon 远程调用【Personnel】3、Nacos作为配置中心4、Nacos 命令空间5、Nacos配置文件参数详解N…...

如何评价2023年美赛ABC题目
A题 遭受干旱侵袭的植物群落 背景 不同种类的植物对压力的反应方式不同。例如,草原对干旱非常敏感。干旱发生的频率和严重 程度各不相同。大量的观察表明,不同物种的数量在植物群落如何适应连续几代的干旱周期中 起着重要作用。在一些只有一种植物的…...
Win10显示dds及tga缩略图
整理之前做游戏MOD时收集的模型资源,3D游戏模型的贴图文件格式基本都是dds或tga的,毕竟无损压缩、支持嵌入MipMap、带透明通道、可以被GPU硬解balabala...道理我都懂但这俩玩意系统根本直接查看不了,就算装上专门的看图软件或插件,文件夹视图下也没有缩略图预览,只能一个个点开…...
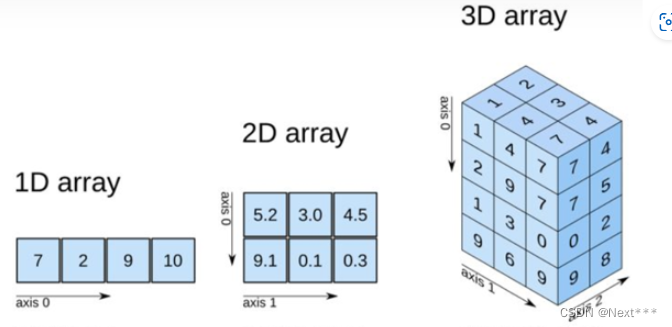
Lesson5.1---Python 之 NumPy 简介和创建数组
一、NumPy 简介 NumPy(Numerical Python)是 Python 的一种开源的数值计算扩展。这种工具可用来存储和处理大型矩阵,比 Python 自身的嵌套列表(nested list structure)结构要高效的多(该结构也可以用来表示…...
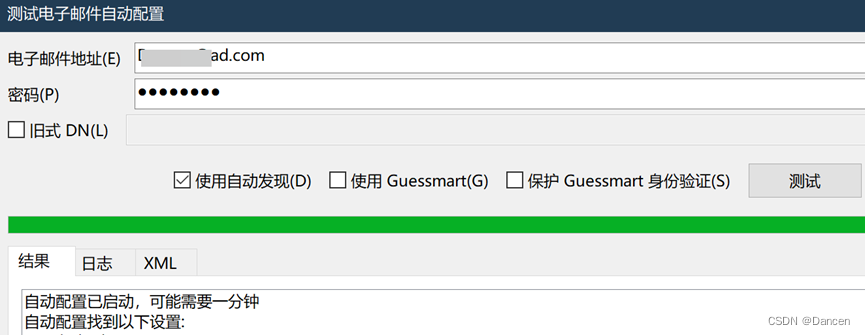
Exchange 2013升级以及域名绑定等若干问题
环境简介Exchange 2013服务器位于ad域中,系统为Windows server 2012 R2,其内部域名为:mail.ad.com一. Exchange客户端无法在浏览器中正常运行在域中部署Exchange服务器后,除了可以通过outlook、foxmail等邮件客户端来使用邮箱功能…...
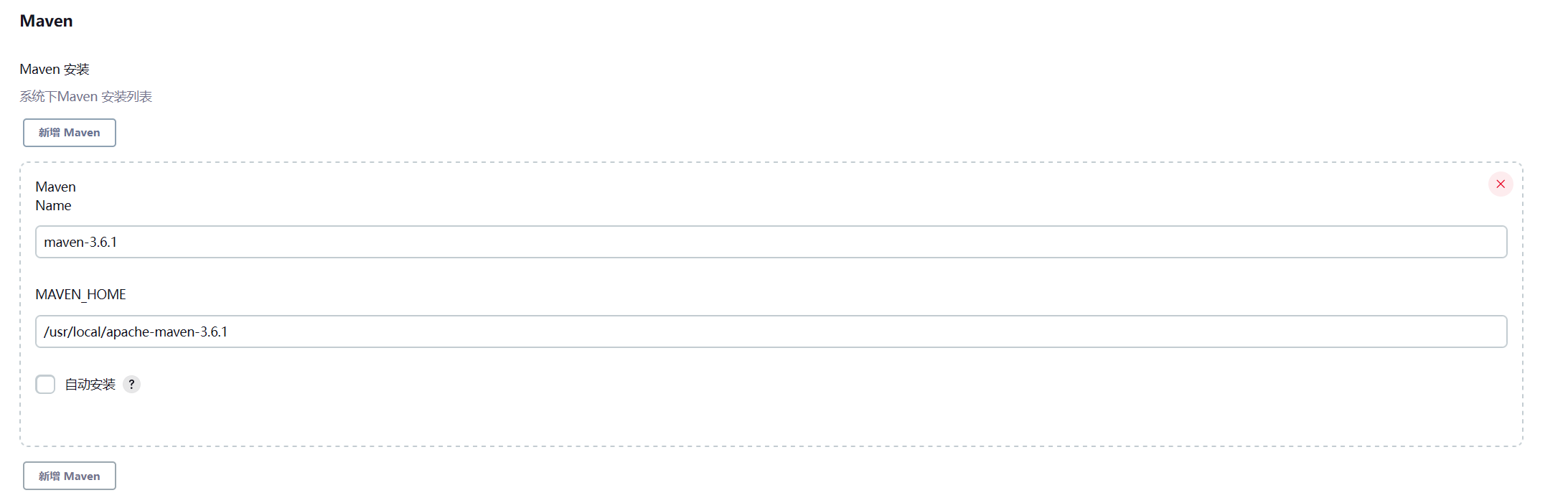
linux安装jenkins
1. 官网寻找安装方式 进入到jenkins官网,找到对应的下载页面:https://www.jenkins.io/download/ 根据自己系统还有想要使用的版本,进行选择即可。这里我们使用CentOS作为示例,版本选择长期支持版(LTS) 2.…...
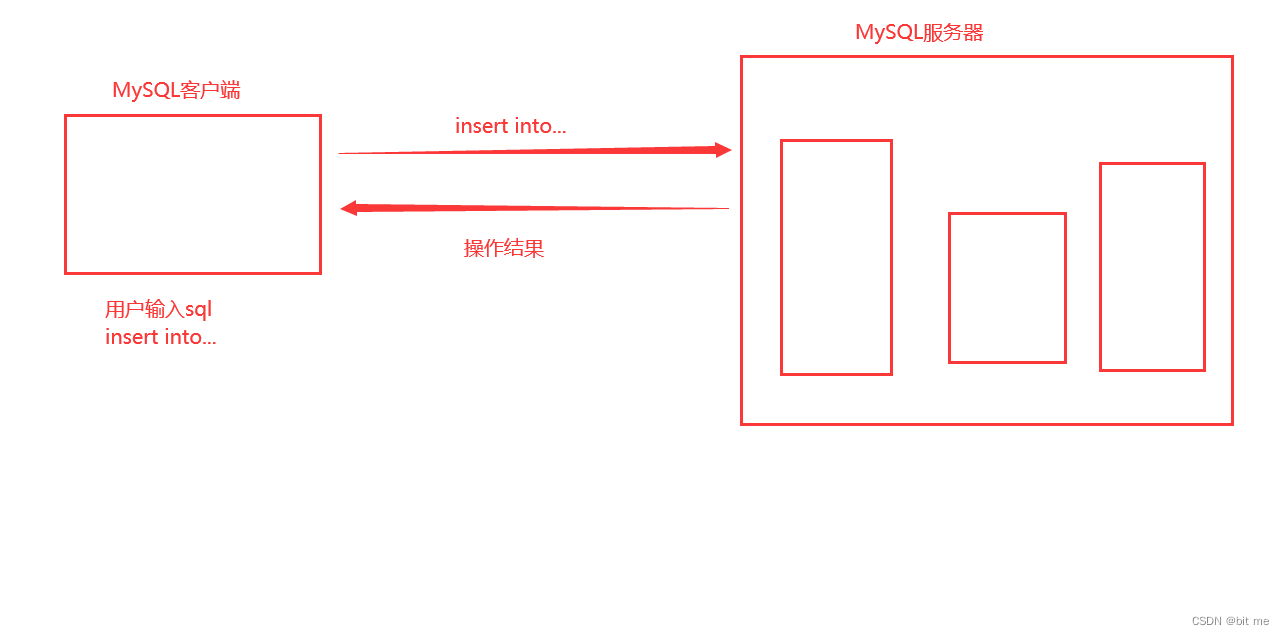
【MySQL】MySQL表的增删改查(CRUD)
✨个人主页:bit me👇 ✨当前专栏:MySQL数据库👇 ✨算法专栏:算法基础👇 ✨每日一语:生命久如暗室,不碍朝歌暮诗 目 录🔓一. CRUD🔒二. 新增(Creat…...

GCC for openEuler 数据库性能优化实践
GCC for openEuler是基于开源GCC开发的编译器工具链(包含编译器,汇编器,链接器),在openEuler社区开源发布,并通过鲲鹏社区免费提供二进制包,支持aarch64处理器架构。 关键特性 支持鲲鹏微架构芯…...
【C++】类和对象(第二篇)
文章目录1. 类的6个默认成员函数2. 构造函数2.1 构造函数的引出2.2 构造函数的特性3. 析构函数3.1 析构函数的引出3.2 析构函数的特性4. 拷贝构造函数4.1 概念4.2 特性5.赋值运算符重载5.1 运算符重载概念注意练习5.2 赋值重载实现赋值重载的特性6. const成员函数7. 取地址及co…...

MySQL数据库(数据库约束)
目录 数据库约束 数据库约束的类型: null约束 : unique约束(唯一约束): default约束(默认值约束): primary key约束(主键约束): for…...
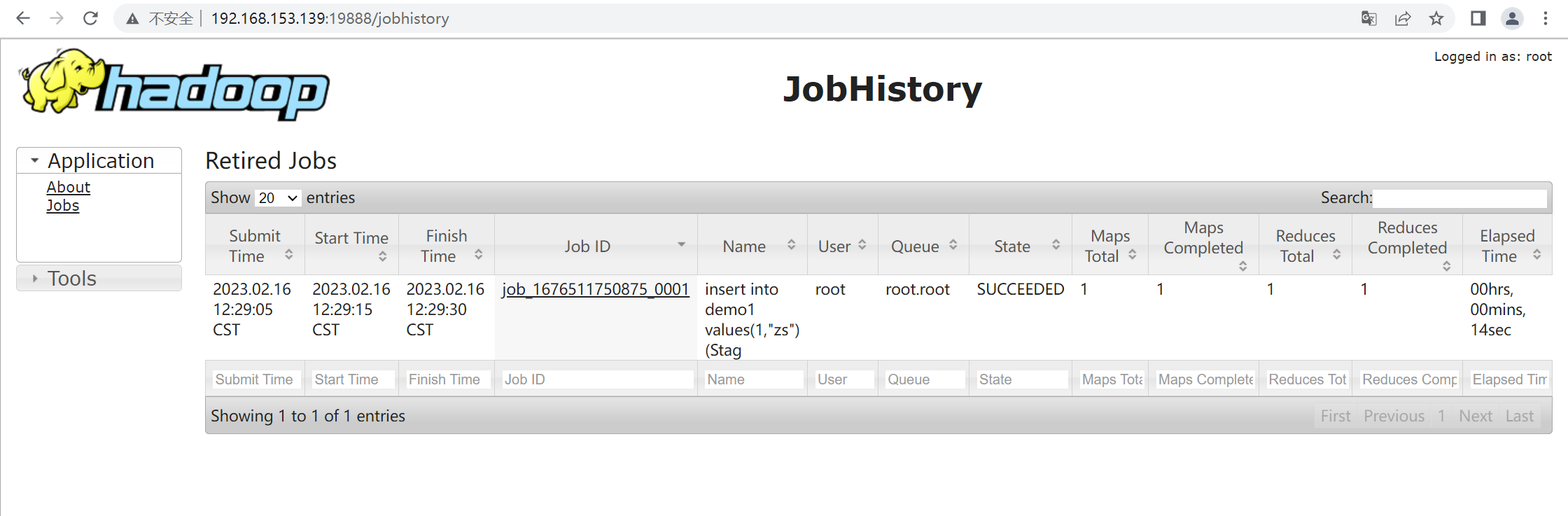
Hive的安装与配置
一、配置Hadoop环境先看看伪分布式下的集群环境有没有错误的情况:输入命令:start-all.sh jps查看伪分布式的所有进程是否完善二、解压并配置HiveHive压缩包→ https://pan.baidu.com/s/1eOF_ICZV8rV-CEh3nX-7Xw 提取码: m31e 复制这段内容后打开百度网盘…...

关于医院医用医疗隔离电源系统应用案例的分析探讨
【摘要】:介绍该三级医院采用安科瑞医用隔离电源柜,使用落地式安装方式,从而实现将TN系统转化为IT系统,同时监测系统绝缘情况。 【关键词】医用隔离电源柜;IT系统;绝缘情况;中西医结合医院&…...
【LeetCode】剑指 Offer 07. 重建二叉树 p62 -- Java Version
题目链接:https://leetcode.cn/problems/zhong-jian-er-cha-shu-lcof/ 1. 题目介绍(07. 重建二叉树) 输入某二叉树的前序遍历和中序遍历的结果,请构建该二叉树并返回其根节点。 假设输入的前序遍历和中序遍历的结果中都不含重复的…...

模型参数、模型存储精度、参数与显存
模型参数量衡量单位 M:百万(Million) B:十亿(Billion) 1 B 1000 M 1B 1000M 1B1000M 参数存储精度 模型参数是固定的,但是一个参数所表示多少字节不一定,需要看这个参数以什么…...

解锁数据库简洁之道:FastAPI与SQLModel实战指南
在构建现代Web应用程序时,与数据库的交互无疑是核心环节。虽然传统的数据库操作方式(如直接编写SQL语句与psycopg2交互)赋予了我们精细的控制权,但在面对日益复杂的业务逻辑和快速迭代的需求时,这种方式的开发效率和可…...

多模态商品数据接口:融合图像、语音与文字的下一代商品详情体验
一、多模态商品数据接口的技术架构 (一)多模态数据融合引擎 跨模态语义对齐 通过Transformer架构实现图像、语音、文字的语义关联。例如,当用户上传一张“蓝色连衣裙”的图片时,接口可自动提取图像中的颜色(RGB值&…...

对WWDC 2025 Keynote 内容的预测
借助我们以往对苹果公司发展路径的深入研究经验,以及大语言模型的分析能力,我们系统梳理了多年来苹果 WWDC 主题演讲的规律。在 WWDC 2025 即将揭幕之际,我们让 ChatGPT 对今年的 Keynote 内容进行了一个初步预测,聊作存档。等到明…...

(转)什么是DockerCompose?它有什么作用?
一、什么是DockerCompose? DockerCompose可以基于Compose文件帮我们快速的部署分布式应用,而无需手动一个个创建和运行容器。 Compose文件是一个文本文件,通过指令定义集群中的每个容器如何运行。 DockerCompose就是把DockerFile转换成指令去运行。 …...
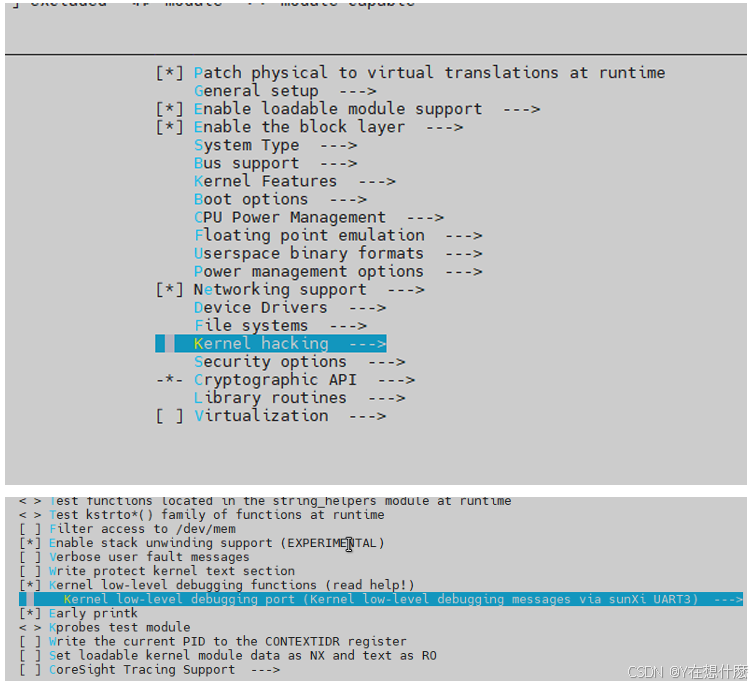
全志A40i android7.1 调试信息打印串口由uart0改为uart3
一,概述 1. 目的 将调试信息打印串口由uart0改为uart3。 2. 版本信息 Uboot版本:2014.07; Kernel版本:Linux-3.10; 二,Uboot 1. sys_config.fex改动 使能uart3(TX:PH00 RX:PH01),并让boo…...
佰力博科技与您探讨热释电测量的几种方法
热释电的测量主要涉及热释电系数的测定,这是表征热释电材料性能的重要参数。热释电系数的测量方法主要包括静态法、动态法和积分电荷法。其中,积分电荷法最为常用,其原理是通过测量在电容器上积累的热释电电荷,从而确定热释电系数…...
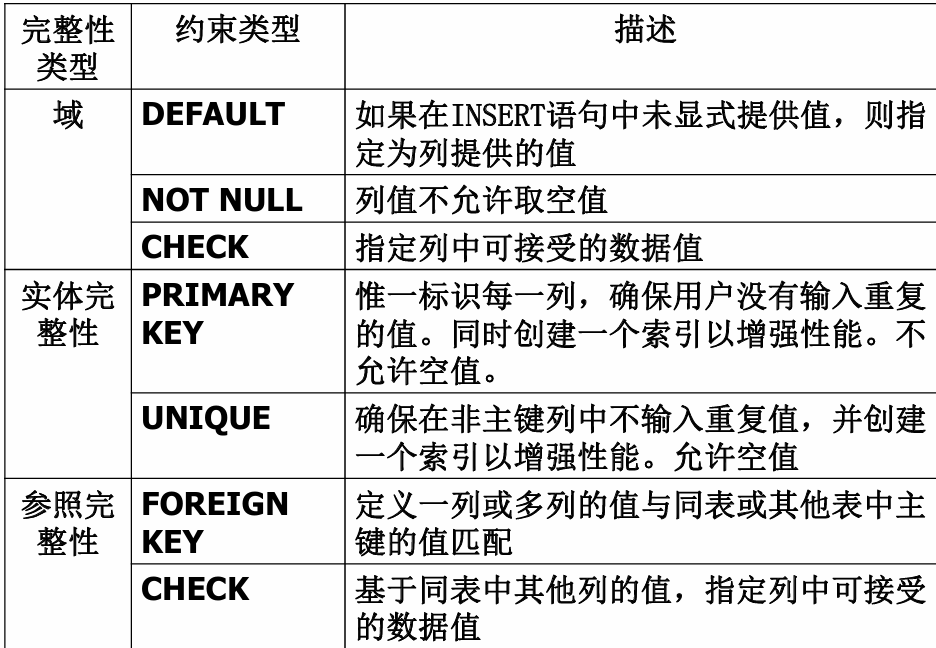
七、数据库的完整性
七、数据库的完整性 主要内容 7.1 数据库的完整性概述 7.2 实体完整性 7.3 参照完整性 7.4 用户定义的完整性 7.5 触发器 7.6 SQL Server中数据库完整性的实现 7.7 小结 7.1 数据库的完整性概述 数据库完整性的含义 正确性 指数据的合法性 有效性 指数据是否属于所定…...
FFmpeg:Windows系统小白安装及其使用
一、安装 1.访问官网 Download FFmpeg 2.点击版本目录 3.选择版本点击安装 注意这里选择的是【release buids】,注意左上角标题 例如我安装在目录 F:\FFmpeg 4.解压 5.添加环境变量 把你解压后的bin目录(即exe所在文件夹)加入系统变量…...

前端高频面试题2:浏览器/计算机网络
本专栏相关链接 前端高频面试题1:HTML/CSS 前端高频面试题2:浏览器/计算机网络 前端高频面试题3:JavaScript 1.什么是强缓存、协商缓存? 强缓存: 当浏览器请求资源时,首先检查本地缓存是否命中。如果命…...