ROS2 入门应用 请求和应答(C++)
ROS2 入门应用 请求和应答(C++)
- 1. 创建功能包
- 2. 创建源文件
- 2.1. 服务端
- 2.2. 客户端
- 3. 添加依赖关系
- 4. 添加编译信息
- 4.1. 添加搜索库
- 4.2. 增加可执行文件
- 4.3. 增加可执行文件位置
- 5. 编译和运行
1. 创建功能包
在《ROS2 入门应用 工作空间》中已创建和加载了ros2_ws工作空间
在《ROS2 入门应用 元功能包(C++)》中已创建和加载了my_package功能包
那么就创建一个独立的cpp_srvcli功能包来做服务的请求和应答的功能
cd ~/ros2_ws/src
ros2 pkg create --build-type ament_cmake cpp_srvcli --dependencies rclcpp example_interfaces
--dependencies可选参数将会自动在package.xml和CMakeLists.txt中添加必要的依赖行
依赖example_interfaces包,将会使用到example_interfaces的srv文件,两位整数求和服务:
int64 a
int64 b
---
int64 sum
2. 创建源文件
进入cpp_srvcli功能包的src文件夹
cd ~/ros2_ws/src/cpp_srvcli/src
2.1. 服务端
新建add_two_ints_server.cpp服务端源文件
nano add_two_ints_server.cpp
复制以下内容到文件中:
#include "rclcpp/rclcpp.hpp"
#include "example_interfaces/srv/add_two_ints.hpp"#include <memory>/* 求和函数 */
void add(const std::shared_ptr<example_interfaces::srv::AddTwoInts::Request> request,std::shared_ptr<example_interfaces::srv::AddTwoInts::Response> response)
{/* 从请求中添加两个整数,并将总和提供给响应 */response->sum = request->a + request->b;/* 使用日志通知控制台其服务状态 */RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "Incoming request\na: %ld" " b: %ld", request->a, request->b);RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "sending back response: [%ld]", (long int)response->sum);
}int main(int argc, char **argv)
{/* 初始化ROS2 */rclcpp::init(argc, argv);/* 定义服务端节点add_two_ints_server */std::shared_ptr<rclcpp::Node> node = rclcpp::Node::make_shared("add_two_ints_server");/* 创建服务名为add_two_ints,服务函数为add的service服务端 */rclcpp::Service<example_interfaces::srv::AddTwoInts>::SharedPtr service =node->create_service<example_interfaces::srv::AddTwoInts>("add_two_ints", &add);/* 通知准备就绪 */RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "Ready to add two ints.");/* 运行节点 */rclcpp::spin(node);/* 退出ROS2 */rclcpp::shutdown();
}
2.2. 客户端
新建add_two_ints_client.cpp客户端源文件
nano add_two_ints_client.cpp
复制以下内容到文件中:
#include "rclcpp/rclcpp.hpp"
#include "example_interfaces/srv/add_two_ints.hpp"#include <chrono>
#include <cstdlib>
#include <memory>/* 方便表示时间 */
using namespace std::chrono_literals;int main(int argc, char **argv)
{/* 初始化ROS2 */rclcpp::init(argc, argv);/* 校验 */if (argc != 3) {RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "usage: add_two_ints_client X Y");return 1;}/* 定义客户端节点add_two_ints_client */std::shared_ptr<rclcpp::Node> node = rclcpp::Node::make_shared("add_two_ints_client");/* 创建服务名为add_two_ints的client客户端 */rclcpp::Client<example_interfaces::srv::AddTwoInts>::SharedPtr client =node->create_client<example_interfaces::srv::AddTwoInts>("add_two_ints");/* 创建请求request */auto request = std::make_shared<example_interfaces::srv::AddTwoInts::Request>();request->a = atoll(argv[1]);request->b = atoll(argv[2]);/* 搜索服务节点,间隔1s */while (!client->wait_for_service(1s)) {if (!rclcpp::ok()) {RCLCPP_ERROR(rclcpp::get_logger("rclcpp"), "Interrupted while waiting for the service. Exiting.");return 0;}/* 如果找不到,将会继续等待 */RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "service not available, waiting again...");}/* 获得应答并显示其状态 */auto result = client->async_send_request(request);// Wait for the result.if (rclcpp::spin_until_future_complete(node, result) ==rclcpp::FutureReturnCode::SUCCESS){RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "Sum: %ld", result.get()->sum);} else {RCLCPP_ERROR(rclcpp::get_logger("rclcpp"), "Failed to call service add_two_ints");}/* 退出ROS2 */rclcpp::shutdown();return 0;
}
3. 添加依赖关系
创建功能包时,已通过--dependencies可选参数自动在package.xml中添加必要的依赖行
<depend>rclcpp</depend>
<depend>example_interfaces</depend>
4. 添加编译信息
在CMakeLists.txt编译文件中
4.1. 添加搜索库
创建功能包时,已通过--dependencies可选参数自动在CMakeLists.txt中添加必要的搜索库依赖行
find_package(rclcpp REQUIRED)
find_package(example_interfaces REQUIRED)
4.2. 增加可执行文件
然后,再增加可执行文件,
src/add_two_ints_server.cpp命名为server可执行文件,
src/add_two_ints_client.cpp命名为client可执行文件,
并添加目标依赖关系:
add_executable(server src/add_two_ints_server.cpp)
ament_target_dependencies(server rclcpp example_interfaces)add_executable(client src/add_two_ints_client.cpp)
ament_target_dependencies(client rclcpp example_interfaces)
4.3. 增加可执行文件位置
最后,增加可执行文件位置,这样ROS2就可以找到现在的可执行文件:
install(TARGETSserverclientDESTINATION lib/${PROJECT_NAME})
5. 编译和运行
进入工作空间根目录
cd ~/ros2_ws
在编译之前检查缺失的依赖项(可跳过):
rosdep install -i --from-path src --rosdistro humble -y
编译:
colcon build --packages-select cpp_srvcli
打开一个新终端,运行服务端节点:
ros2 run cpp_srvcli server# [INFO] [rclcpp]: Ready to add two ints.
打开一个新终端,运行客户端节点:
ros2 run cpp_srvcli client 1 2# [INFO] [rclcpp]: Sum: 3
谢谢
相关文章:
)
ROS2 入门应用 请求和应答(C++)
ROS2 入门应用 请求和应答(C)1. 创建功能包2. 创建源文件2.1. 服务端2.2. 客户端3. 添加依赖关系4. 添加编译信息4.1. 添加搜索库4.2. 增加可执行文件4.3. 增加可执行文件位置5. 编译和运行1. 创建功能包 在《ROS2 入门应用 工作空间》中已创建和加载了…...
)
华为机试题:HJ73 计算日期到天数转换(python)
文章目录博主精品专栏导航知识点详解1、input():获取控制台(任意形式)的输入。输出均为字符串类型。1.1、input() 与 list(input()) 的区别、及其相互转换方法2、print() :打印输出。3、整型int() :将指定进制…...
将springboot项目生成可依赖的jar,并引入到项目中
1、将springboot项目生成可依赖的jar包的方法 SpringBoot项目默认打包的是可运行jar包,也可以打包成不可运行的jar包。 能打成可运行的jar包是因为,Spring Boot 项目引入了 spring-boot-maven-plugin 依赖包。 spring-boot-maven-plugin具有repackage …...

小红书搜索关键词布局指南,这4种词一定要把握好
在小红书搜索关键词布局,是提升搜索推流的重要方法,今天跟你讲清楚小红书搜索关键词布局怎么做~做小红书的都知道,小红书的主要流量来源一个是推荐,另一个就是搜索,关键词决定了你的精准人群,那…...

安全研发人员能力模型窥探
能力 是一个比较抽象的概念,不同的行业、管理者、研发人员对能力的认知都会有差异。另外,作为研发团队的相应的职级定级、绩效考核的基础,一个“大家普遍认可”的能力的模型是非常重要的。这是比职级模型更高层的一个基本模型,所谓…...
【面试总结】Linux篇·操作及原理篇
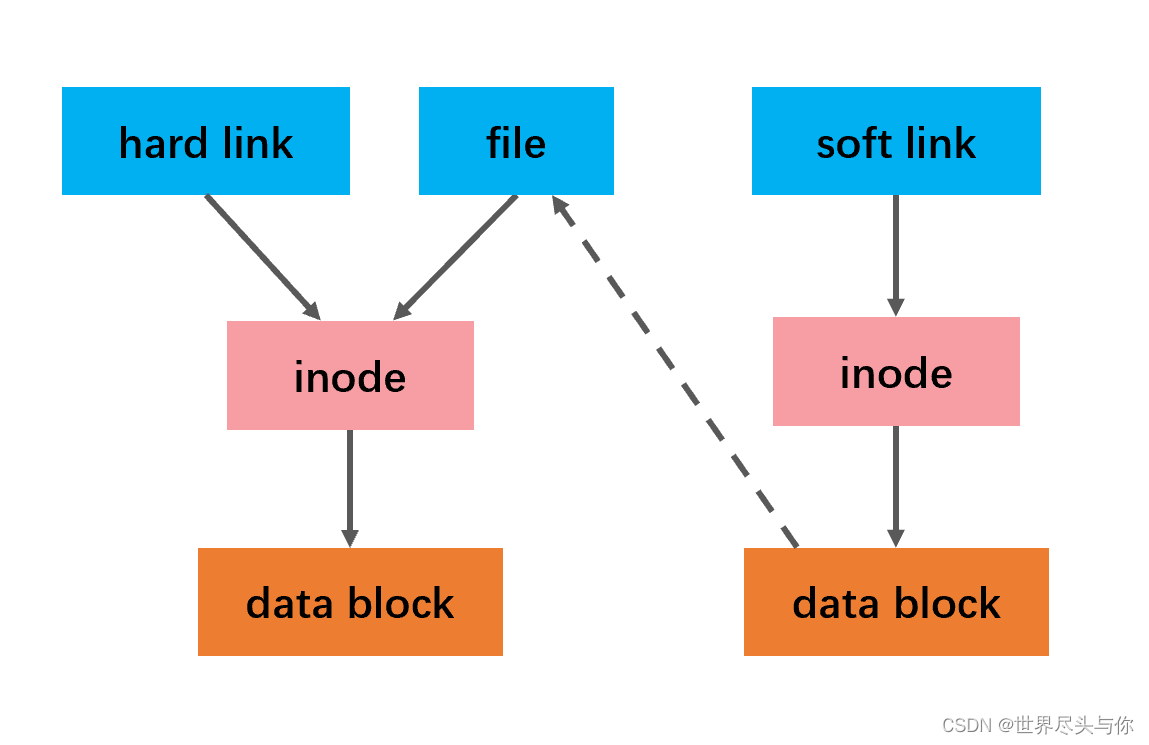
【面试总结】Linux篇原理篇1.介绍一下inode2.说一下Linux系统的目录结构3.说一下Linux系统的文件类型4.如何在Linux上配置一个IP地址5.Linux负载是什么?6.Linux中的软链接和硬链接有什么区别?1.介绍一下inode 硬盘的最小存储单位是扇区(Sector)…...

C++中如何实现用异或运算找出数组中只出现一次的数字???
文章目录1、异或运算符的运算1、异或运算符的运算 问题描述: 给出一个指定的数组,只有一个数出现一次,剩下都出现两次,找出出现一次的数字。指定数组为[1,2,2,1,3,4,3]。 样例输出:4 #include<iostream> using…...
红黑树的历史和由来。
一个数组,1,2,3,4,5,...n; 一共n个数字。1、直接查找想要查询第n个数字,直接搜索,就是n次查询。ps:那么问题来了,这样查询也太慢了,有什么改进的呢?2、二分查找这个时候,二分查找更快。不过就是…...

蓝库云|制造业数字化转型为何转不动?资料处理很重要
数字化转型已经成为每个产业势在必行的课题,没有人会怀疑数字化技术与科技能解放的生产力能量,但为什么看似美好的愿景,实行起来却如此缓慢?蓝库云认为这是因为没有盖好「资料治理」的地基。 面对不断变化的法令规范要求…...

【python学习笔记】 :Lambda 函数
Lambda 函数是 Python 中的匿名函数。有些人将它们简称为lambdas,它们的语法如下: lambda arguments: expressionlambda 关键字可以用来创建一个 lambda 函数,紧跟其后的是参数列表和用冒号分割开的单个表达式。例如,lambda x: 2…...

Nginx的proxy buffer参数设置
1. proxy_buffering 语法:proxy_buffering on|off 默认值:proxy_buffering on 上下文:http,server,location作用:该指令开启从后端被代理服务器的响应body缓冲。 如果proxy_buffering开启,nginx假定被代理的后端服务器会以最…...
SPI简介与实例分析
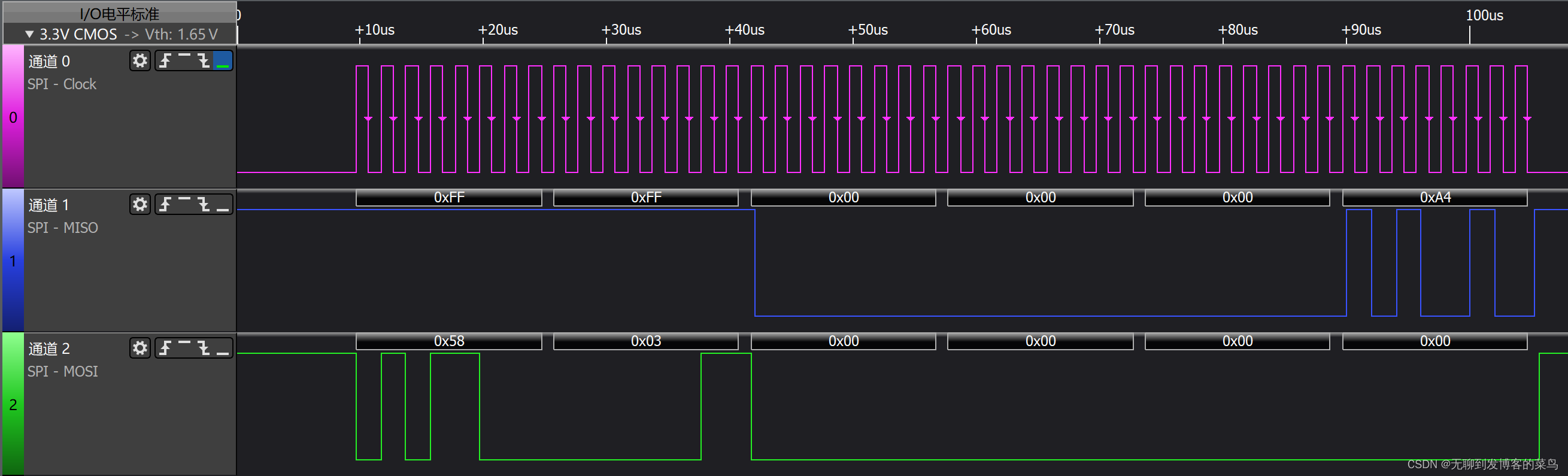
SPI简介 SPI 协议是由Motorola提出的通讯协议 (Serial Peripheral Interface) ,是一种高速全双工的串行通信总线。 SPI 通讯使用 3 条总线 :SCK、 MOSI、 MISO ,以及若干片选线(SS、CS、NSS)。 主机要和哪个从机通信,就把对应的…...

通过基于pgsql的timescaleDB的time_bucket函数实现自定义聚合粒度
1、自己写的不完全满足要求的实现方式 with tb_tmp as (select *, //计算该时间距离第一天有多少天((extract(epoch from create_time) /3600/24)::integer) as ct_ifrom test.test_salary )select min(a.create_time) as create_time,sum(a.salary) from (select *,//移动数据…...
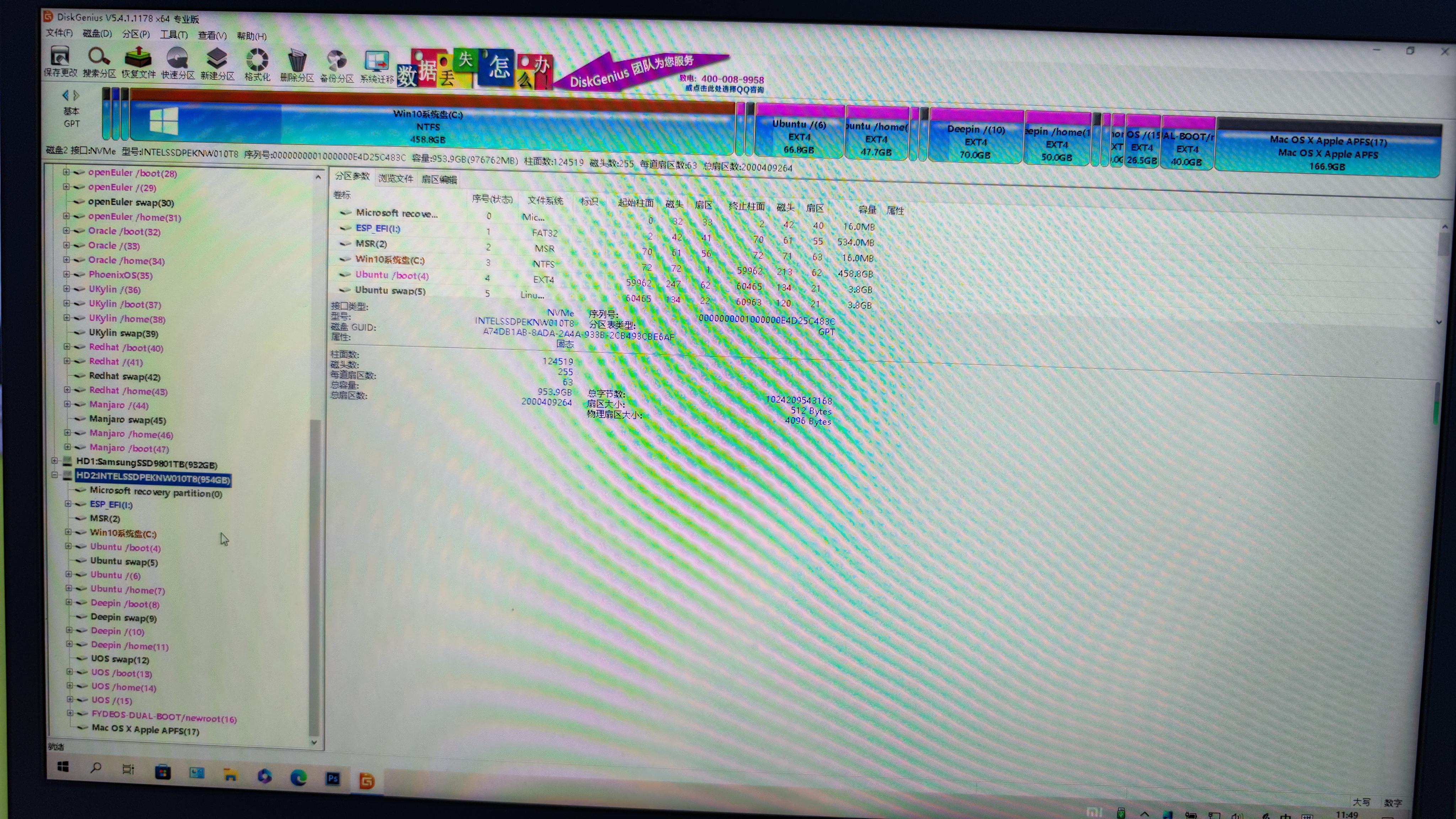
一台电脑安装26个操作系统(windows,macos,linux)
首先看看安装了哪些操作系统1-4: windows系统 四个5.Ubuntu6.deepin7.UOS家庭版8.fydeOS9.macOS10.银河麒麟11.红旗OS12.openSUSE Leap13.openAnolis14.openEuler(未安装桌面UI)15.中标麒麟(NeoKylin)16.centos17.debian Edu18.fedora19.oraclelinux20.R…...

dockerfile文件
dockerfile文件内容 Form ip端口/centos:regular ENV JAVA_HOME /E:/Program Files/Java/jdk1.8.0_351 ENV PATH $JAVA_HOME/bin:$JAVA_HOME/jre/bin:$PATH ENV LANG en_US.UTF-8 ENV LANGUAGE en_US:en ENV LC_ALL en_US.UTF-8 WORKDIR /opt COPY target/fast.jar /op…...

视觉SLAM ch11回环检测
回环检测的关键:如何有效的检测出相机经过同一个地方。如果成功的检测到可以为后端的位姿图提供更多有效数据,得到全局一致的估计。 回环检测提供了当前数据和所有历史数据的关联,还可以用回环检测进行重定位。 具体方法: 一&am…...
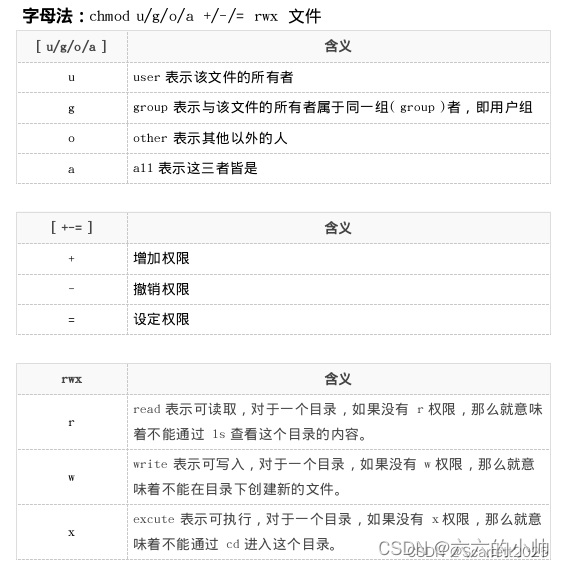
关于Ubuntu20.04文件系统思考
文章目录问题产生Ubuntu文件系统中普通用户可读写地址Ubuntu文件系统Ubuntu文件系统详解一级目录二级目录查找Ubuntu中软件安装位置Ubuntu修改文件权限问题产生 使用electron框架开发桌面端跨平台软件时,当开发完成的程序部署到Ubuntu上,系统无法产生日…...
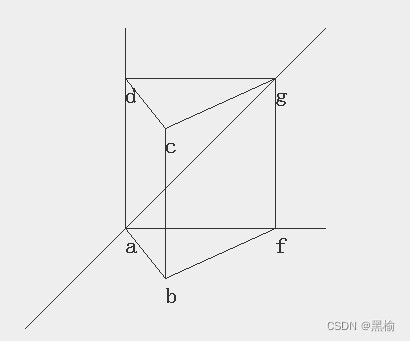
内嵌于球的等边三棱柱
( A, B )---3*30*2---( 1, 0 )( 0, 1 ) 做一个网络让输入只有3个节点,每个训练集里有两张图片,让B的训练集全为0,排列组合A,观察迭代次数平均值的变化。共完成了64组,但只有12组不同的迭代次数。 差值结构 A-B 迭代次…...
论文解读 | [CVPR2020] ContourNet:向精确的任意形状场景文本检测迈出进一步
目录 1 研究背景和目的 1.1 主要贡献: 1.2 两个挑战: 2 ContourNet 3 方法论 3.1 Adaptive-RPN 3.2 LOTM 3.3 点重定位算法 4 实验和结果 论文地址:ContourNet: Taking a Further Step toward Accurate Arbitrary-shaped Scene Tex…...
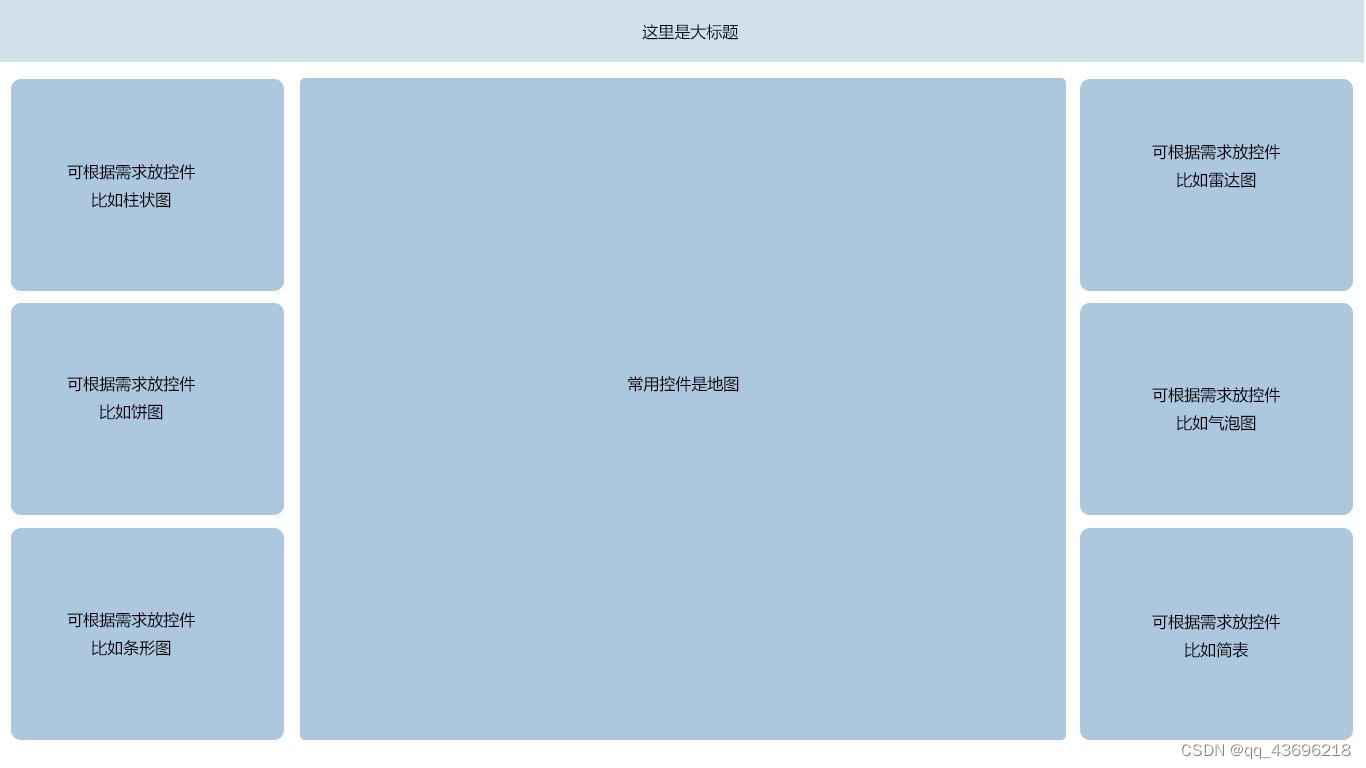
干货分享|数据可视化报表制作技巧
脑中想得再好,也要看最终的效果呈现。但偏偏有些用户分析思维不差,就是数据分析报表的制作拖了后腿,导致始终无法完美呈现数据可视化分析效果。本文将总结奥威BI软件上的常用的数据可视化报表制作技巧,供大家随时查阅。 BI数据可…...

在软件开发中正确使用MySQL日期时间类型的深度解析
在日常软件开发场景中,时间信息的存储是底层且核心的需求。从金融交易的精确记账时间、用户操作的行为日志,到供应链系统的物流节点时间戳,时间数据的准确性直接决定业务逻辑的可靠性。MySQL作为主流关系型数据库,其日期时间类型的…...

智慧工地云平台源码,基于微服务架构+Java+Spring Cloud +UniApp +MySql
智慧工地管理云平台系统,智慧工地全套源码,java版智慧工地源码,支持PC端、大屏端、移动端。 智慧工地聚焦建筑行业的市场需求,提供“平台网络终端”的整体解决方案,提供劳务管理、视频管理、智能监测、绿色施工、安全管…...

《Playwright:微软的自动化测试工具详解》
Playwright 简介:声明内容来自网络,将内容拼接整理出来的文档 Playwright 是微软开发的自动化测试工具,支持 Chrome、Firefox、Safari 等主流浏览器,提供多语言 API(Python、JavaScript、Java、.NET)。它的特点包括&a…...

Go 语言接口详解
Go 语言接口详解 核心概念 接口定义 在 Go 语言中,接口是一种抽象类型,它定义了一组方法的集合: // 定义接口 type Shape interface {Area() float64Perimeter() float64 } 接口实现 Go 接口的实现是隐式的: // 矩形结构体…...
Opencv中的addweighted函数
一.addweighted函数作用 addweighted()是OpenCV库中用于图像处理的函数,主要功能是将两个输入图像(尺寸和类型相同)按照指定的权重进行加权叠加(图像融合),并添加一个标量值&#x…...

Spring Boot面试题精选汇总
🤟致敬读者 🟩感谢阅读🟦笑口常开🟪生日快乐⬛早点睡觉 📘博主相关 🟧博主信息🟨博客首页🟫专栏推荐🟥活动信息 文章目录 Spring Boot面试题精选汇总⚙️ **一、核心概…...

Spring Boot+Neo4j知识图谱实战:3步搭建智能关系网络!
一、引言 在数据驱动的背景下,知识图谱凭借其高效的信息组织能力,正逐步成为各行业应用的关键技术。本文聚焦 Spring Boot与Neo4j图数据库的技术结合,探讨知识图谱开发的实现细节,帮助读者掌握该技术栈在实际项目中的落地方法。 …...

关于 WASM:1. WASM 基础原理
一、WASM 简介 1.1 WebAssembly 是什么? WebAssembly(WASM) 是一种能在现代浏览器中高效运行的二进制指令格式,它不是传统的编程语言,而是一种 低级字节码格式,可由高级语言(如 C、C、Rust&am…...
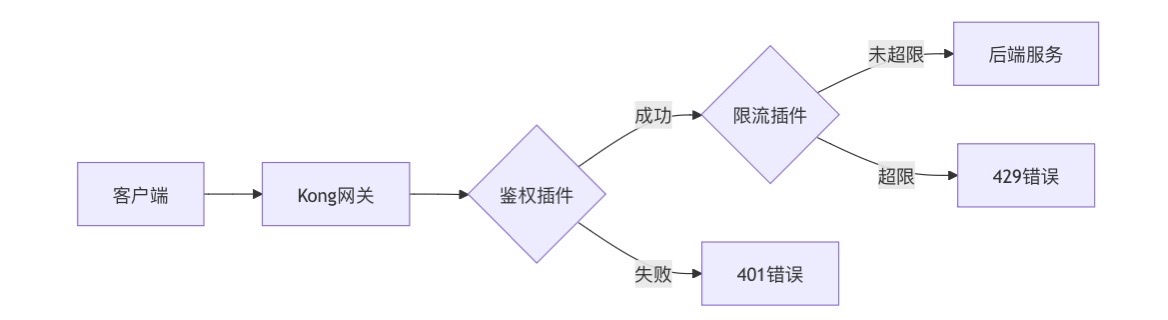
云原生安全实战:API网关Kong的鉴权与限流详解
🔥「炎码工坊」技术弹药已装填! 点击关注 → 解锁工业级干货【工具实测|项目避坑|源码燃烧指南】 一、基础概念 1. API网关(API Gateway) API网关是微服务架构中的核心组件,负责统一管理所有API的流量入口。它像一座…...
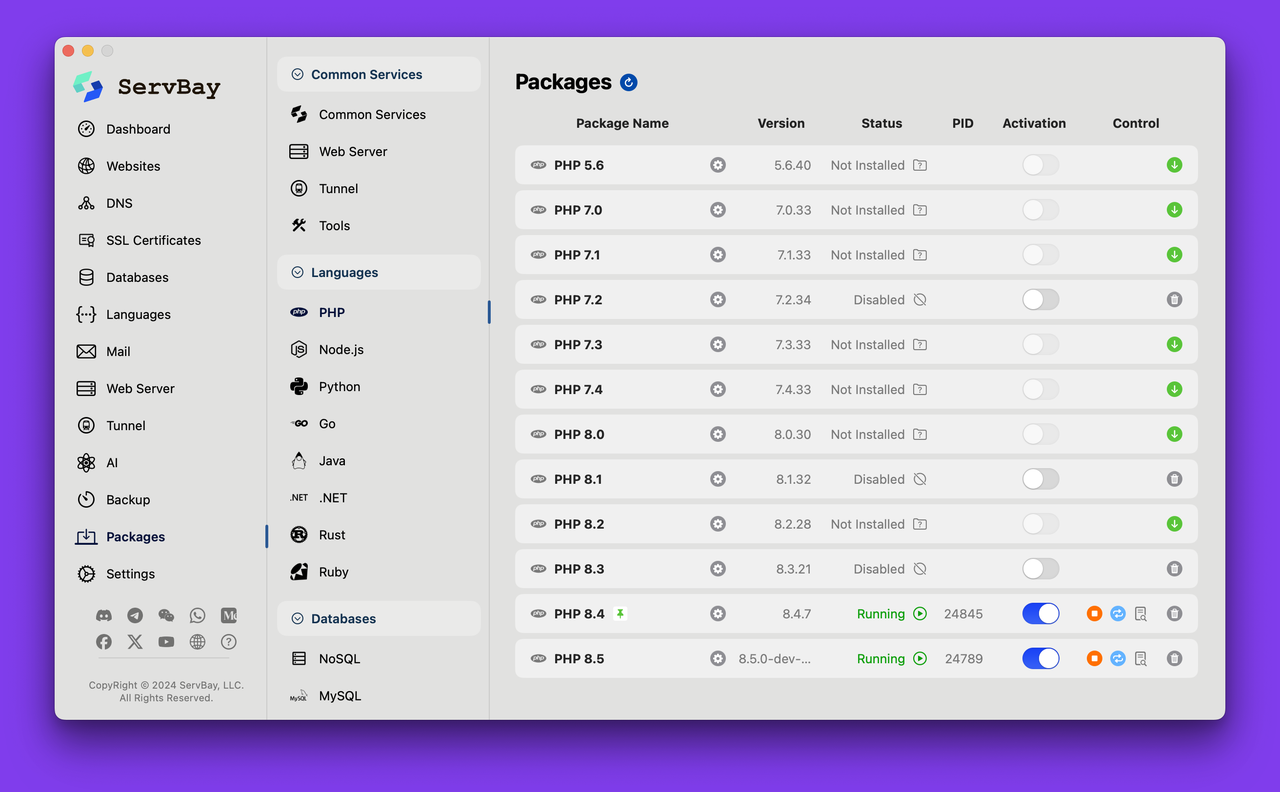
PHP 8.5 即将发布:管道操作符、强力调试
前不久,PHP宣布了即将在 2025 年 11 月 20 日 正式发布的 PHP 8.5!作为 PHP 语言的又一次重要迭代,PHP 8.5 承诺带来一系列旨在提升代码可读性、健壮性以及开发者效率的改进。而更令人兴奋的是,借助强大的本地开发环境 ServBay&am…...