[足式机器人]Part3 变分法Ch01-1 数学预备知识——【读书笔记】
本文仅供学习使用
本文参考:
《变分法基础-第三版》老大中
《变分学讲义》张恭庆
《Calculus of Variations of Optimal Control Theory》-变分法和最优控制论-Daneil Liberzon
Ch01-1 数学基础-预备知识1
- 1 数学基础-预备知识
- 1.1 泰勒公式
- 1.1.1 一元函数的泰勒公式
- 1.1.2 二元函数的泰勒公式
- 1.1.3 m元函数(多元函数)的泰勒公式
- 1.2 含参变量的积分
- 1.2.1 连续性
- 1.2.2 积分顺序的可交换性
- 1.2.3 求导与积分顺序的可交换性
- 1.2.4 莱布尼茨公式
- 1.3 场论基础
- 1.3.1 方向导数与梯度
1 数学基础-预备知识
1.1 泰勒公式
1.1.1 一元函数的泰勒公式
泰勒中值定理/泰勒定理:
若函数 f ( x ) f\left( x \right) f(x)在点 x 0 x_0 x0的某个开区间 ( a , b ) \left( a,b \right) (a,b)内具有 n + 1 n+1 n+1阶连续导数,则当 x x x在 ( a , b ) \left( a,b \right) (a,b)内时, f ( x ) f\left( x \right) f(x)可表示为:
f ( x ) = f ( x 0 ) + d f ( x 0 ) d x ( x − x 0 ) + 1 2 ! d 2 f ( x 0 ) d x 2 ( x − x 0 ) 2 + ⋯ + 1 n ! d n f ( x 0 ) d x n ( x − x 0 ) n + R n f\left( x \right) =f\left( x_0 \right) +\frac{\mathrm{d}f\left( x_0 \right)}{\mathrm{d}x}\left( x-x_0 \right) +\frac{1}{2!}\frac{\mathrm{d}^2f\left( x_0 \right)}{\mathrm{d}x^2}\left( x-x_0 \right) ^2+\cdots +\frac{1}{n!}\frac{\mathrm{d}^nf\left( x_0 \right)}{\mathrm{d}x^n}\left( x-x_0 \right) ^n+R_n f(x)=f(x0)+dxdf(x0)(x−x0)+2!1dx2d2f(x0)(x−x0)2+⋯+n!1dxndnf(x0)(x−x0)n+Rn
其中:
上式称为 f ( x ) f\left( x \right) f(x)在点 x 0 x_0 x0按 ( x − x 0 ) \left( x-x_0 \right) (x−x0)的幂展开到n阶的泰勒公式/泰勒级数展开 ;
R n R_n Rn称为拉格朗日型余项,为一个当 x → x 0 x\rightarrow x_0 x→x0时,比 ∣ x − x 0 ∣ n \left| x-x_0 \right|^n ∣x−x0∣n更高阶的无穷小,或称为比 ∣ x − x 0 ∣ \left| x-x_0 \right| ∣x−x0∣高 n − 1 n-1 n−1阶的无穷小。
一元函数的极值定理:
若可导函数 f ( x ) f\left( x \right) f(x)在定义区间内点 x 0 x_0 x0取得极值,则在该点必有: d f ( x 0 ) d x = 0 \frac{\mathrm{d}f\left( x_0 \right)}{\mathrm{d}x}=0 dxdf(x0)=0
1.1.2 二元函数的泰勒公式
二元函数的泰勒中值定理:
f ( x , y ) = f ( x 0 , y 0 ) + ( Δ x ∂ ∂ x + Δ y ∂ ∂ y ) f ( x 0 , y 0 ) + 1 2 ! ( Δ x ∂ ∂ x + Δ y ∂ ∂ y ) 2 f ( x 0 , y 0 ) + ⋯ + 1 k ! ( Δ x ∂ ∂ x + Δ y ∂ ∂ y ) k f ( x 0 , y 0 ) + ⋯ + 1 n ! ( Δ x ∂ ∂ x + Δ y ∂ ∂ y ) n f ( x 0 , y 0 ) + R n f\left( x,y \right) =f\left( x_0,y_0 \right) +\left( \varDelta x\frac{\partial}{\partial x}+\varDelta y\frac{\partial}{\partial y} \right) f\left( x_0,y_0 \right) +\frac{1}{2!}\left( \varDelta x\frac{\partial}{\partial x}+\varDelta y\frac{\partial}{\partial y} \right) ^2f\left( x_0,y_0 \right) +\cdots +\frac{1}{k!}\left( \varDelta x\frac{\partial}{\partial x}+\varDelta y\frac{\partial}{\partial y} \right) ^kf\left( x_0,y_0 \right) +\cdots +\frac{1}{n!}\left( \varDelta x\frac{\partial}{\partial x}+\varDelta y\frac{\partial}{\partial y} \right) ^nf\left( x_0,y_0 \right) +R_n f(x,y)=f(x0,y0)+(Δx∂x∂+Δy∂y∂)f(x0,y0)+2!1(Δx∂x∂+Δy∂y∂)2f(x0,y0)+⋯+k!1(Δx∂x∂+Δy∂y∂)kf(x0,y0)+⋯+n!1(Δx∂x∂+Δy∂y∂)nf(x0,y0)+Rn
其中:
( Δ x ∂ ∂ x + Δ y ∂ ∂ y ) k f ( x 0 , y 0 ) = ∑ r = 0 k C k r ( Δ x ) r ( Δ y ) k − r ∂ k f ( x 0 , y 0 ) ∂ x r ∂ y k − r \left( \varDelta x\frac{\partial}{\partial x}+\varDelta y\frac{\partial}{\partial y} \right) ^kf\left( x_0,y_0 \right) =\sum_{r=0}^k{C_{\mathrm{k}}^{r}\left( \varDelta x \right) ^r\left( \varDelta y \right) ^{k-r}\frac{\partial ^kf\left( x_0,y_0 \right)}{\partial x^r\partial y^{k-r}}} (Δx∂x∂+Δy∂y∂)kf(x0,y0)=∑r=0kCkr(Δx)r(Δy)k−r∂xr∂yk−r∂kf(x0,y0)
R n = 1 ( n + 1 ) ! ( Δ x ∂ ∂ x + Δ y ∂ ∂ y ) n + 1 f ( x 0 + θ Δ x , y 0 + θ Δ y ) , θ ∈ ( 0 , 1 ) R_n=\frac{1}{\left( n+1 \right) !}\left( \varDelta x\frac{\partial}{\partial x}+\varDelta y\frac{\partial}{\partial y} \right) ^{n+1}f\left( x_0+\theta \varDelta x,y_0+\theta \varDelta y \right) ,\theta \in \left( 0,1 \right) Rn=(n+1)!1(Δx∂x∂+Δy∂y∂)n+1f(x0+θΔx,y0+θΔy),θ∈(0,1),称为 f ( x , y ) f\left( x,y \right) f(x,y)在点 ( x 0 , y 0 ) \left( x_0,y_0 \right) (x0,y0)的n阶拉格朗日型余项。
令 ρ = Δ x 2 + Δ y 2 , Δ x = ρ cos α , Δ y = ρ sin α \rho =\sqrt{\varDelta x^2+\varDelta y^2},\varDelta x=\rho \cos \alpha ,\varDelta y=\rho \sin \alpha ρ=Δx2+Δy2,Δx=ρcosα,Δy=ρsinα,对于邻域上任一点 ( x 0 + Δ x , y 0 + Δ y ) \left( x_0+\varDelta x,y_0+\varDelta y \right) (x0+Δx,y0+Δy), f ( x , y ) f\left( x,y \right) f(x,y)的各 n + 1 n+1 n+1阶偏导数的绝对值都不超过一个正数 M M M,则余项的绝对值有:
∣ R n ∣ ⩽ M ( n + 1 ) ! ( ∣ Δ x ∣ + ∣ Δ y ∣ ) n + 1 = M ρ n + 1 ( n + 1 ) ! ( ∣ cos α ∣ + ∣ sin α ∣ ) n + 1 ⩽ 2 M ρ n + 1 \left| R_n \right|\leqslant \frac{M}{\left( n+1 \right) !}\left( \left| \varDelta x \right|+\left| \varDelta y \right| \right) ^{n+1}=\frac{M\rho ^{n+1}}{\left( n+1 \right) !}\left( \left| \cos \alpha \right|+\left| \sin \alpha \right| \right) ^{n+1}\leqslant 2M\rho ^{n+1} ∣Rn∣⩽(n+1)!M(∣Δx∣+∣Δy∣)n+1=(n+1)!Mρn+1(∣cosα∣+∣sinα∣)n+1⩽2Mρn+1
可知: R n R_n Rn是一个比 ρ \rho ρ 高 n n n阶的无穷小。
二元函数的极值定理:
若可导函数 f ( x , y ) f\left( x,y \right) f(x,y)在定义区间内点 ( x 0 , y 0 ) \left( x_0,y_0 \right) (x0,y0)取得极值,则在该点必有: ∂ f ( x 0 , y 0 ) ∂ x = ∂ f ( x 0 , y 0 ) ∂ y = 0 \frac{\partial f\left( x_0,y_0 \right)}{\partial x}=\frac{\partial f\left( x_0,y_0 \right)}{\partial y}=0 ∂x∂f(x0,y0)=∂y∂f(x0,y0)=0
1.1.3 m元函数(多元函数)的泰勒公式
多元函数的泰勒中值定理:
f ( x 1 , x 2 , ⋯ x m ) = f ( x 1 0 , x 2 0 , ⋯ x m 0 ) + 1 1 ! ( Δ x 1 ∂ ∂ x 1 + Δ x 2 ∂ ∂ x 2 + ⋯ + Δ x k ∂ ∂ x k + ⋯ + Δ x m ∂ ∂ x m ) f ( x 1 0 , x 2 0 , ⋯ x m 0 ) + 1 2 ! ( Δ x 1 ∂ ∂ x 1 + Δ x 2 ∂ ∂ x 2 + ⋯ + Δ x k ∂ ∂ x k + ⋯ + Δ x m ∂ ∂ x m ) 2 f ( x 1 0 , x 2 0 , ⋯ x m 0 ) + ⋯ + 1 n ! ( Δ x 1 ∂ ∂ x 1 + Δ x 2 ∂ ∂ x 2 + ⋯ + Δ x k ∂ ∂ x k + ⋯ + Δ x m ∂ ∂ x m ) n f ( x 1 0 , x 2 0 , ⋯ x m 0 ) + R n f\left( x_1,x_2,\cdots x_{\mathrm{m}} \right) =f\left( x_{1}^{0},x_{2}^{0},\cdots x_{\mathrm{m}}^{0} \right) +\frac{1}{1!}\left( \varDelta x_1\frac{\partial}{\partial x_1}+\varDelta x_2\frac{\partial}{\partial x_2}+\cdots +\varDelta x_{\mathrm{k}}\frac{\partial}{\partial x_{\mathrm{k}}}+\cdots +\varDelta x_{\mathrm{m}}\frac{\partial}{\partial x_{\mathrm{m}}} \right) f\left( x_{1}^{0},x_{2}^{0},\cdots x_{\mathrm{m}}^{0} \right) +\frac{1}{2!}\left( \varDelta x_1\frac{\partial}{\partial x_1}+\varDelta x_2\frac{\partial}{\partial x_2}+\cdots +\varDelta x_{\mathrm{k}}\frac{\partial}{\partial x_{\mathrm{k}}}+\cdots +\varDelta x_{\mathrm{m}}\frac{\partial}{\partial x_{\mathrm{m}}} \right) ^2f\left( x_{1}^{0},x_{2}^{0},\cdots x_{\mathrm{m}}^{0} \right) +\cdots +\frac{1}{n!}\left( \varDelta x_1\frac{\partial}{\partial x_1}+\varDelta x_2\frac{\partial}{\partial x_2}+\cdots +\varDelta x_{\mathrm{k}}\frac{\partial}{\partial x_{\mathrm{k}}}+\cdots +\varDelta x_{\mathrm{m}}\frac{\partial}{\partial x_{\mathrm{m}}} \right) ^nf\left( x_{1}^{0},x_{2}^{0},\cdots x_{\mathrm{m}}^{0} \right) +R_n f(x1,x2,⋯xm)=f(x10,x20,⋯xm0)+1!1(Δx1∂x1∂+Δx2∂x2∂+⋯+Δxk∂xk∂+⋯+Δxm∂xm∂)f(x10,x20,⋯xm0)+2!1(Δx1∂x1∂+Δx2∂x2∂+⋯+Δxk∂xk∂+⋯+Δxm∂xm∂)2f(x10,x20,⋯xm0)+⋯+n!1(Δx1∂x1∂+Δx2∂x2∂+⋯+Δxk∂xk∂+⋯+Δxm∂xm∂)nf(x10,x20,⋯xm0)+Rn
其中:
Δ x k = x k − x k 0 ( k = 1 , 2 , ⋯ m ) \varDelta x_{\mathrm{k}}=x_{\mathrm{k}}-x_{\mathrm{k}}^{0}\left( k=1,2,\cdots m \right) Δxk=xk−xk0(k=1,2,⋯m)
R n = 1 ( n + 1 ) ! ( Δ x 1 ∂ ∂ x 1 + Δ x 2 ∂ ∂ x 2 + ⋯ + Δ x k ∂ ∂ x k + ⋯ + Δ x m ∂ ∂ x m ) n + 1 f ( x 1 0 + θ Δ x 1 , x 2 0 + θ Δ x 2 , ⋯ x m 0 + θ Δ x m ) R_n=\frac{1}{\left( n+1 \right) !}\left( \varDelta x_1\frac{\partial}{\partial x_1}+\varDelta x_2\frac{\partial}{\partial x_2}+\cdots +\varDelta x_{\mathrm{k}}\frac{\partial}{\partial x_{\mathrm{k}}}+\cdots +\varDelta x_{\mathrm{m}}\frac{\partial}{\partial x_{\mathrm{m}}} \right) ^{n+1}f\left( x_{1}^{0}+\theta \varDelta x_1,x_{2}^{0}+\theta \varDelta x_2,\cdots x_{\mathrm{m}}^{0}+\theta \varDelta x_{\mathrm{m}} \right) Rn=(n+1)!1(Δx1∂x1∂+Δx2∂x2∂+⋯+Δxk∂xk∂+⋯+Δxm∂xm∂)n+1f(x10+θΔx1,x20+θΔx2,⋯xm0+θΔxm)
上式还可以写成简洁形式:
f ( x 1 , x 2 , ⋯ x m ) = f ( x 1 0 , x 2 0 , ⋯ x m 0 ) + ∑ i = 0 n 1 i ! ( ∑ k = 11 m Δ x k ∂ ∂ x k ) i f ( x 1 0 , x 2 0 , ⋯ x m 0 ) + R n f\left( x_1,x_2,\cdots x_{\mathrm{m}} \right) =f\left( x_{1}^{0},x_{2}^{0},\cdots x_{\mathrm{m}}^{0} \right) +\sum_{i=0}^n{\frac{1}{i!}\left( \sum_{k=11}^m{\varDelta x_{\mathrm{k}}\frac{\partial}{\partial x_{\mathrm{k}}}} \right) ^if\left( x_{1}^{0},x_{2}^{0},\cdots x_{\mathrm{m}}^{0} \right)}+R_n f(x1,x2,⋯xm)=f(x10,x20,⋯xm0)+∑i=0ni!1(∑k=11mΔxk∂xk∂)if(x10,x20,⋯xm0)+Rn
当 ρ = Δ x 1 2 + Δ x 2 2 + ⋯ + Δ x m 2 → 0 \rho =\sqrt{{\varDelta x_1}^2+{\varDelta x_2}^2+\cdots +{\varDelta x_{\mathrm{m}}}^2}\rightarrow 0 ρ=Δx12+Δx22+⋯+Δxm2→0时, R n R_n Rn是一个比 ρ \rho ρ 高 n n n阶的无穷小。
多元函数的极值定理:
若可导函数 f ( x 1 , x 2 , ⋯ x m ) f\left( x_1,x_2,\cdots x_{\mathrm{m}} \right) f(x1,x2,⋯xm)在定义区间内点 ( x 1 0 , x 2 0 , ⋯ x m 0 ) \left( x_{1}^{0},x_{2}^{0},\cdots x_{\mathrm{m}}^{0} \right) (x10,x20,⋯xm0)取得极值,则在该点必有: ∂ f ( x 1 0 , x 2 0 , ⋯ x m 0 ) ∂ x k = 0 , k = 1 , 2 , ⋯ , m \frac{\partial f\left( x_{1}^{0},x_{2}^{0},\cdots x_{\mathrm{m}}^{0} \right)}{\partial x_{\mathrm{k}}}=0,k=1,2,\cdots ,m ∂xk∂f(x10,x20,⋯xm0)=0,k=1,2,⋯,m
1.2 含参变量的积分
设函数 f ( x , y ) f\left( x,y \right) f(x,y)是矩形域 D [ a ⩽ x ⩽ b , c ⩽ y ⩽ d ] D\left[ a\leqslant x\leqslant b,c\leqslant y\leqslant d \right] D[a⩽x⩽b,c⩽y⩽d]上的有界函数,对于 [ c , d ] \left[ c,d \right] [c,d]上任何固定的 y 0 y_0 y0,函数 f ( x , y 0 ) f\left( x,y_0 \right) f(x,y0)就是 x x x的函数,若这个函数在 [ a , b ] \left[ a,b \right] [a,b]上可积,则 ∫ a b f ( x , y 0 ) d x \int_a^b{f\left( x,y_0 \right)}dx ∫abf(x,y0)dx就唯一地确定一个数,这个数与 y 0 y_0 y0有关,当 y 0 y_0 y0在 [ c , d ] \left[ c,d \right] [c,d]上变动时,所得到的积分值一般来说是不同的,可表示为:
φ ( y ) = ∫ a b f ( x , y ) d x \varphi \left( y \right) =\int_a^b{f\left( x,y \right)}dx φ(y)=∫abf(x,y)dx
它是 y y y的函数,定义域为 [ c , d ] \left[ c,d \right] [c,d],通常称 y y y为参数,它在积分过程中被看做常量,并且积分 ∫ a b f ( x , y ) d x \int_a^b{f\left( x,y \right)}dx ∫abf(x,y)dx称为含参变量积分——讨论含参变量积分的连续性、可导性、可积性
1.2.1 连续性
设函数 f ( x , y ) f\left( x,y \right) f(x,y)在闭区域 D [ a , b ; c , d ] D\left[ a,b;c,d \right] D[a,b;c,d]上连续,则函数 φ ( y ) = ∫ a b f ( x , y ) d x \varphi \left( y \right) =\int_a^b{f\left( x,y \right)}dx φ(y)=∫abf(x,y)dx在闭区域 [ c , d ] \left[ c,d \right] [c,d]上连续,上述性质可改写为:
lim y → y 0 ∫ a b f ( x , y ) d x = ∫ a b lim y → y 0 f ( x , y ) d x \underset{y\rightarrow y_0}{\lim}\int_a^b{f\left( x,y \right)}dx=\int_a^b{\underset{y\rightarrow y_0}{\lim}f\left( x,y \right)}dx y→y0lim∫abf(x,y)dx=∫aby→y0limf(x,y)dx
即:极限与积分的运算次序可交换——积分号下求极限
证明:(待补充)
1.2.2 积分顺序的可交换性
若函数 f ( x , y ) f\left( x,y \right) f(x,y)在闭区域 D [ a , b ; c , d ] D\left[ a,b;c,d \right] D[a,b;c,d]上连续,则有:
∫ c d d y ∫ a b f ( x , y ) d x = ∫ a b d x ∫ a b f ( x , y ) d y \int_c^d{\mathrm{d}y}\int_a^b{f\left( x,y \right)}dx=\int_a^b{\mathrm{d}x}\int_a^b{f\left( x,y \right)}dy ∫cddy∫abf(x,y)dx=∫abdx∫abf(x,y)dy
即:积分顺序可以交换——积分号下求积分
证明:(待补充)
1.2.3 求导与积分顺序的可交换性
若函数 f ( x , y ) f\left( x,y \right) f(x,y)与 ∂ f ( x , y ) ∂ y \frac{\partial f\left( x,y \right)}{\partial y} ∂y∂f(x,y)在矩形域 D [ a ⩽ x ⩽ b , c ⩽ y ⩽ d ] D\left[ a\leqslant x\leqslant b,c\leqslant y\leqslant d \right] D[a⩽x⩽b,c⩽y⩽d]上连续,则积分 φ ( y ) = ∫ a b f ( x , y ) d x \varphi \left( y \right) =\int_a^b{f\left( x,y \right)}dx φ(y)=∫abf(x,y)dx在闭区域 [ c , d ] \left[ c,d \right] [c,d]上可导,且有:
d d y ∫ a b f ( x , y ) d x = ∫ a b ∂ f ( x , y ) ∂ y d x \frac{\mathrm{d}}{\mathrm{d}y}\int_a^b{f\left( x,y \right)}\mathrm{d}x=\int_a^b{\frac{\partial f\left( x,y \right)}{\partial y}}\mathrm{d}x dyd∫abf(x,y)dx=∫ab∂y∂f(x,y)dx
即:积分与求导次序可以交换——积分号下求微商
证明:(待补充)
1.2.4 莱布尼茨公式
若函数 f ( x , y ) f\left( x,y \right) f(x,y)与 ∂ f ( x , y ) ∂ y \frac{\partial f\left( x,y \right)}{\partial y} ∂y∂f(x,y)在矩形域 D [ a ⩽ x ⩽ b , c ⩽ y ⩽ d ] D\left[ a\leqslant x\leqslant b,c\leqslant y\leqslant d \right] D[a⩽x⩽b,c⩽y⩽d]上连续,又有函数 α ( y ) , β ( y ) \alpha \left( y \right) ,\beta \left( y \right) α(y),β(y)在闭区域 [ c , d ] \left[ c,d \right] [c,d]上可导,且当 c ⩽ y ⩽ d c\leqslant y\leqslant d c⩽y⩽d时,有 a ⩽ α ( y ) ⩽ b , a ⩽ β ( y ) ⩽ b a\leqslant \alpha \left( y \right) \leqslant b,a\leqslant \beta \left( y \right) \leqslant b a⩽α(y)⩽b,a⩽β(y)⩽b,则有函数:
φ ( y ) = ∫ α ( y ) β ( y ) f ( x , y ) d x \varphi \left( y \right) =\int_{\alpha \left( y \right)}^{\beta \left( y \right)}{f\left( x,y \right)}dx φ(y)=∫α(y)β(y)f(x,y)dx
在区间 [ c , d ] \left[ c,d \right] [c,d]上可导,且有:
d φ ( y ) d y = d d y ∫ α ( y ) β ( y ) f ( x , y ) d x = ∫ α ( y ) β ( y ) ∂ f ( x , y ) ∂ y d x + f ( β ( y ) , y ) d β ( y ) d y − f ( α ( y ) , y ) d α ( y ) d y \frac{\mathrm{d}\varphi \left( y \right)}{\mathrm{d}y}=\frac{\mathrm{d}}{\mathrm{d}y}\int_{\alpha \left( y \right)}^{\beta \left( y \right)}{f\left( x,y \right)}dx=\int_{\alpha \left( y \right)}^{\beta \left( y \right)}{\frac{\partial f\left( x,y \right)}{\partial y}}dx+f\left( \beta \left( y \right) ,y \right) \frac{\mathrm{d}\beta \left( y \right)}{\mathrm{d}y}-f\left( \alpha \left( y \right) ,y \right) \frac{\mathrm{d}\alpha \left( y \right)}{\mathrm{d}y} dydφ(y)=dyd∫α(y)β(y)f(x,y)dx=∫α(y)β(y)∂y∂f(x,y)dx+f(β(y),y)dydβ(y)−f(α(y),y)dydα(y)
证明:
对于 [ c , d ] \left[ c,d \right] [c,d]内任何 y y y,当 y y y有改变量 Δ y \varDelta y Δy时, α ( y ) , β ( y ) \alpha \left( y \right) ,\beta \left( y \right) α(y),β(y)分别有改变量: Δ α = α ( y + Δ y ) − α ( y ) , Δ β = β ( y + Δ y ) − β ( y ) \varDelta \alpha =\alpha \left( y+\varDelta y \right) -\alpha \left( y \right) ,\varDelta \beta =\beta \left( y+\varDelta y \right) -\beta \left( y \right) Δα=α(y+Δy)−α(y),Δβ=β(y+Δy)−β(y),而 φ ( y ) = ∫ α ( y ) β ( y ) f ( x , y ) d x \varphi \left( y \right) =\int_{\alpha \left( y \right)}^{\beta \left( y \right)}{f\left( x,y \right)}dx φ(y)=∫α(y)β(y)f(x,y)dx有改变量:
Δ φ ( y ) = φ ( y + Δ y ) − φ ( y ) = ∫ α ( y ) + Δ α β ( y ) + Δ β f ( x , y + Δ y ) d x − ∫ α ( y ) β ( y ) f ( x , y ) d x = ∫ α ( y ) β ( y ) f ( x , y + Δ y ) d x + ∫ β ( y ) β ( y ) + Δ β f ( x , y + Δ y ) d x − ∫ α ( y ) α ( y ) + Δ α f ( x , y + Δ y ) d x − ∫ α ( y ) β ( y ) f ( x , y ) d x = ∫ α ( y ) β ( y ) [ f ( x , y + Δ y ) − f ( x , y ) ] d x + ∫ β ( y ) β ( y ) + Δ β f ( x , y + Δ y ) d x − ∫ α ( y ) α ( y ) + Δ α f ( x , y + Δ y ) d x \varDelta \varphi \left( y \right) =\varphi \left( y+\varDelta y \right) -\varphi \left( y \right) =\int_{\alpha \left( y \right) +\varDelta \alpha}^{\beta \left( y \right) +\varDelta \beta}{f\left( x,y+\varDelta y \right)}dx-\int_{\alpha \left( y \right)}^{\beta \left( y \right)}{f\left( x,y \right)}dx \\ =\int_{\alpha \left( y \right)}^{\beta \left( y \right)}{f\left( x,y+\varDelta y \right)}dx+\int_{\beta \left( y \right)}^{\beta \left( y \right) +\varDelta \beta}{f\left( x,y+\varDelta y \right)}dx-\int_{\alpha \left( y \right)}^{\alpha \left( y \right) +\varDelta \alpha}{f\left( x,y+\varDelta y \right)}dx-\int_{\alpha \left( y \right)}^{\beta \left( y \right)}{f\left( x,y \right)}dx \\ =\int_{\alpha \left( y \right)}^{\beta \left( y \right)}{\left[ f\left( x,y+\varDelta y \right) -f\left( x,y \right) \right]}dx+\int_{\beta \left( y \right)}^{\beta \left( y \right) +\varDelta \beta}{f\left( x,y+\varDelta y \right)}dx-\int_{\alpha \left( y \right)}^{\alpha \left( y \right) +\varDelta \alpha}{f\left( x,y+\varDelta y \right)}dx Δφ(y)=φ(y+Δy)−φ(y)=∫α(y)+Δαβ(y)+Δβf(x,y+Δy)dx−∫α(y)β(y)f(x,y)dx=∫α(y)β(y)f(x,y+Δy)dx+∫β(y)β(y)+Δβf(x,y+Δy)dx−∫α(y)α(y)+Δαf(x,y+Δy)dx−∫α(y)β(y)f(x,y)dx=∫α(y)β(y)[f(x,y+Δy)−f(x,y)]dx+∫β(y)β(y)+Δβf(x,y+Δy)dx−∫α(y)α(y)+Δαf(x,y+Δy)dx
进而推导出(中值定理):
Δ φ ( y ) Δ y = ∫ α ( y ) β ( y ) [ f ( x , y + Δ y ) − f ( x , y ) ] Δ y d x + f ( β ˉ ( y ) , y + Δ y ) Δ β ( y ) Δ y − f ( α ˉ ( y ) , y + Δ y ) Δ α ( y ) Δ y \frac{\varDelta \varphi \left( y \right)}{\varDelta y}=\int_{\alpha \left( y \right)}^{\beta \left( y \right)}{\frac{\left[ f\left( x,y+\varDelta y \right) -f\left( x,y \right) \right]}{\varDelta y}}dx+f\left( \bar{\beta}\left( y \right) ,y+\varDelta y \right) \frac{\varDelta \beta \left( y \right)}{\varDelta y}-f\left( \bar{\alpha}\left( y \right) ,y+\varDelta y \right) \frac{\varDelta \alpha \left( y \right)}{\varDelta y} ΔyΔφ(y)=∫α(y)β(y)Δy[f(x,y+Δy)−f(x,y)]dx+f(βˉ(y),y+Δy)ΔyΔβ(y)−f(αˉ(y),y+Δy)ΔyΔα(y)
根据上述连续性与可导性,得:
lim Δ y → 0 f ( β ˉ ( y ) , y + Δ y ) Δ β ( y ) Δ y = f ( β ( y ) , y ) d β ( y ) d y lim Δ y → 0 f ( α ˉ ( y ) , y + Δ y ) Δ α ( y ) Δ y = f ( α ( y ) , y ) d α ( y ) d y \underset{\varDelta y\rightarrow 0}{\lim}f\left( \bar{\beta}\left( y \right) ,y+\varDelta y \right) \frac{\varDelta \beta \left( y \right)}{\varDelta y}=f\left( \beta \left( y \right) ,y \right) \frac{\mathrm{d}\beta \left( y \right)}{\mathrm{d}y} \\ \underset{\varDelta y\rightarrow 0}{\lim}f\left( \bar{\alpha}\left( y \right) ,y+\varDelta y \right) \frac{\varDelta \alpha \left( y \right)}{\varDelta y}=f\left( \alpha \left( y \right) ,y \right) \frac{\mathrm{d}\alpha \left( y \right)}{\mathrm{d}y} Δy→0limf(βˉ(y),y+Δy)ΔyΔβ(y)=f(β(y),y)dydβ(y)Δy→0limf(αˉ(y),y+Δy)ΔyΔα(y)=f(α(y),y)dydα(y)
且有: lim Δ y → 0 ∫ α ( y ) β ( y ) [ f ( x , y + Δ y ) − f ( x , y ) ] Δ y d x = ∫ α ( y ) β ( y ) ∂ f ( x , y ) ∂ y d x \underset{\varDelta y\rightarrow 0}{\lim}\int_{\alpha \left( y \right)}^{\beta \left( y \right)}{\frac{\left[ f\left( x,y+\varDelta y \right) -f\left( x,y \right) \right]}{\varDelta y}}\mathrm{d}x=\int_{\alpha \left( y \right)}^{\beta \left( y \right)}{\frac{\partial f\left( x,y \right)}{\partial y}}\mathrm{d}x Δy→0lim∫α(y)β(y)Δy[f(x,y+Δy)−f(x,y)]dx=∫α(y)β(y)∂y∂f(x,y)dx
因此求得:
d φ ( y ) d y = d d y ∫ α ( y ) β ( y ) f ( x , y ) d x = ∫ α ( y ) β ( y ) ∂ f ( x , y ) ∂ y d x + f ( β ( y ) , y ) d β ( y ) d y − f ( α ( y ) , y ) d α ( y ) d y \frac{\mathrm{d}\varphi \left( y \right)}{\mathrm{d}y}=\frac{\mathrm{d}}{\mathrm{d}y}\int_{\alpha \left( y \right)}^{\beta \left( y \right)}{f\left( x,y \right)}dx=\int_{\alpha \left( y \right)}^{\beta \left( y \right)}{\frac{\partial f\left( x,y \right)}{\partial y}}dx+f\left( \beta \left( y \right) ,y \right) \frac{\mathrm{d}\beta \left( y \right)}{\mathrm{d}y}-f\left( \alpha \left( y \right) ,y \right) \frac{\mathrm{d}\alpha \left( y \right)}{\mathrm{d}y} dydφ(y)=dyd∫α(y)β(y)f(x,y)dx=∫α(y)β(y)∂y∂f(x,y)dx+f(β(y),y)dydβ(y)−f(α(y),y)dydα(y)
1.3 场论基础
场是现实世界中的物理量与空间和时间关系的一种表现形式,它是物质存在的一种形态。如果在空间中某个区域内的每一点,都对应着某物理量的一个确定的值,则在此空间区域内称为存在着该物理量的场。
某物理量在场内的分布可表示为空间位置的函数,这样的函数称为该物理量的点函数。当然物理量在场内还可能随时间变化而变化,因而点函数还可以与时间有关。
- 如果一个物理量具有
数量的性质,那么这个物理量所形成的场就称为数量场或标量场。 - 如果一个物理量具有
向量的性质,那么这个物理量所形成的场就称为向量场或矢量场。 - 如果一个物理量具有
张量的性质,那么这个物理量所形成的场就称为张量场。
在物理量的场中,取值为数量的函数称为数量函数或标量函数,取值为向量的函数称为向量函数或矢量函数,取值为张量的函数称为张量函数。点函数、数量函数、向量函数和张量函数都可简称函数。
1.3.1 方向导数与梯度
具有大小和方向的量称为向量或矢量。向量大小的数值称为向量的长度或向量的模。向量 a ⃗ \vec{a} a的模用 ∣ a ⃗ ∣ \left| \vec{a} \right| ∣a∣来表示。模等于1的向量称为单位向量或单位矢(量)。模等于零的向量称为零向量或零矢量,记作 0 ⃗ \vec{0} 0。
函数 φ = φ ( M ) = φ ( x , y , z ) \varphi =\varphi \left( M \right) =\varphi \left( x,y,z \right) φ=φ(M)=φ(x,y,z)的一阶偏导数 ∂ φ ∂ x , ∂ φ ∂ y , ∂ φ ∂ z \frac{\partial \varphi}{\partial x},\frac{\partial \varphi}{\partial y},\frac{\partial \varphi}{\partial z} ∂x∂φ,∂y∂φ,∂z∂φ分别表示它在点 M M M沿 x , y , z x,y,z x,y,z轴三个特殊方向上的变化率。然而,在许多问题中,函数 φ = φ ( x , y , z ) \varphi =\varphi \left( x,y,z \right) φ=φ(x,y,z) 沿其他方向的变化率也是有实际意义的,因此有必要研究它在其他方向的导数。
设 M 0 M_0 M0是函数 φ ( M ) \varphi \left( M \right) φ(M)中一个确定的点,过此点引一条直线 L L L,在此直线上取与 M 0 M_0 M0相邻的一动点 M M M,点 M 0 M_0 M0到点 M M M的距离为 M 0 M ‾ \overline{M_0M} M0M,当 M → M 0 M\rightarrow M_0 M→M0时,若比 φ ( M ) − φ ( M 0 ) M 0 M ‾ \frac{\varphi \left( M \right) -\varphi \left( M_0 \right)}{\overline{M_0M}} M0Mφ(M)−φ(M0)的极限存在,则它称为函数 φ ( M ) \varphi \left( M \right) φ(M)在点 M 0 M_0 M0沿着 L L L方向的方向导数,并且记作:
∂ φ ( M 0 ) ∂ L = lim M 0 M ‾ → 0 φ ( M ) − φ ( M 0 ) M 0 M ‾ \frac{\partial \varphi \left( M_0 \right)}{\partial L}=\lim_{\overline{M_0M}\rightarrow 0} \frac{\varphi \left( M \right) -\varphi \left( M_0 \right)}{\overline{M_0M}} ∂L∂φ(M0)=M0M→0limM0Mφ(M)−φ(M0)
由此可见,方向导数是函数 φ ( M ) \varphi \left( M \right) φ(M)在某个给定点沿某方向对距离的变化率。当 ∂ φ ∂ L > 0 \frac{\partial \varphi}{\partial L}>0 ∂L∂φ>0时,函数 φ \varphi φ 沿 L L L方向增加;当 ∂ φ ∂ L < 0 \frac{\partial \varphi}{\partial L}<0 ∂L∂φ<0时,函数 φ \varphi φ沿 L L L方向减少;当 ∂ φ ∂ L = 0 \frac{\partial \varphi}{\partial L}=0 ∂L∂φ=0,函数 φ \varphi φ 沿 L L L方向无变化。
过点 M 0 M_0 M0可取无穷多个方向,每个方向都有与之对应的方向导数。在直角坐标系中,可按下面定理给出的公式计算方向导数。
定理: 若数量场 φ = φ ( x , y , z ) \varphi =\varphi \left( x,y,z \right) φ=φ(x,y,z) 在点 M 0 ( x 0 , y 0 , z 0 ) M_0\left( x_0,y_0,z_0 \right) M0(x0,y0,z0)处可微, cos α , cos β , cos γ \cos \alpha ,\cos \beta ,\cos \gamma cosα,cosβ,cosγ 为 L L L方向的方向余弦,则 φ \varphi φ 在点 M 0 M_0 M0处沿 L L L方向的方向导数必存在,且由下面公式给出:
∂ φ ∂ L = ∂ φ ∂ x cos α + ∂ φ ∂ y cos β + ∂ φ ∂ z cos γ \frac{\partial \varphi}{\partial L}=\frac{\partial \varphi}{\partial x}\cos \alpha +\frac{\partial \varphi}{\partial y}\cos \beta +\frac{\partial \varphi}{\partial z}\cos \gamma ∂L∂φ=∂x∂φcosα+∂y∂φcosβ+∂z∂φcosγ
式中: ∂ φ ∂ x , ∂ φ ∂ y , ∂ φ ∂ z \frac{\partial \varphi}{\partial x},\frac{\partial \varphi}{\partial y},\frac{\partial \varphi}{\partial z} ∂x∂φ,∂y∂φ,∂z∂φ为数 φ \varphi φ在点 M 0 M_0 M0处的各偏导数。
证明:(待补充)
上式同时可以表示为两个向量的数量积,即:
∂ φ ∂ L = ( ∂ φ ∂ x i ⃗ + ∂ φ ∂ y j ⃗ + ∂ φ ∂ z k ⃗ ) ⋅ ( cos α i ⃗ + cos β j ⃗ + cos γ k ⃗ ) \frac{\partial \varphi}{\partial L}=\left( \frac{\partial \varphi}{\partial x}\vec{i}+\frac{\partial \varphi}{\partial y}\vec{j}+\frac{\partial \varphi}{\partial z}\vec{k} \right) \cdot \left( \cos \alpha \vec{i}+\cos \beta \vec{j}+\cos \gamma \vec{k} \right) ∂L∂φ=(∂x∂φi+∂y∂φj+∂z∂φk)⋅(cosαi+cosβj+cosγk)
令 L 0 L_0 L0为 L L L的单位向量,与函数 φ \varphi φ无关: L ⃗ 0 = cos α i ⃗ + cos β j ⃗ + cos γ k ⃗ \vec{L}_0=\cos \alpha \vec{i}+\cos \beta \vec{j}+\cos \gamma \vec{k} L0=cosαi+cosβj+cosγk
令向量 G G G为给定点的固定向量,只与函数 φ \varphi φ有关: G ⃗ = ∂ φ ∂ x i ⃗ + ∂ φ ∂ y j ⃗ + ∂ φ ∂ z k ⃗ \vec{G}=\frac{\partial \varphi}{\partial x}\vec{i}+\frac{\partial \varphi}{\partial y}\vec{j}+\frac{\partial \varphi}{\partial z}\vec{k} G=∂x∂φi+∂y∂φj+∂z∂φk
进而将上式表示为:
∂ φ ∂ L = G ⃗ ⋅ L ⃗ 0 = ∣ G ⃗ ∣ cos ( G ⃗ , L ⃗ 0 ) \frac{\partial \varphi}{\partial L}=\vec{G}\cdot \vec{L}_0=\left| \vec{G} \right|\cos \left( \vec{G},\vec{L}_0 \right) ∂L∂φ=G⋅L0= G cos(G,L0)
可知:向量 G ⃗ \vec{G} G在 L ⃗ 0 \vec{L}_0 L0方向的投影等于函数 φ \varphi φ在该方向的方向导数。更为重要的是,当选择 L ⃗ 0 \vec{L}_0 L0的方向与 G ⃗ \vec{G} G方向一致时,即 cos ( G ⃗ , L ⃗ 0 ) = 1 \cos \left( \vec{G},\vec{L}_0 \right) =1 cos(G,L0)=1时,方向导数取得最大值 ∣ G ⃗ ∣ \left| \vec{G} \right| G ,因此 G ⃗ \vec{G} G方向就是函数 φ ( M ) \varphi \left( M \right) φ(M) 变化率最大的方向。向量 G ⃗ \vec{G} G称为函数 φ ( M ) \varphi \left( M \right) φ(M)在给定点 M M M处的梯度,记作 g r a d φ = G ⃗ \mathrm{grad}\varphi =\vec{G} gradφ=G或 ∇ φ = G ⃗ \nabla \varphi =\vec{G} ∇φ=G,grad是英文gradient的缩写,意为梯度,记号▽形如古希伯莱的一种乐器纳布拉(nabla),称为哈密顿算子、纳布拉算子或 ∇ \nabla ∇算子 (读作nabla算子),有时也称为 Del算子。在直角坐标系中它可表示为:
∇ = i ⃗ ∂ ∂ x + j ⃗ ∂ ∂ y + k ⃗ ∂ ∂ z = ∂ ∂ x i ⃗ + ∂ ∂ y j ⃗ + ∂ ∂ z k ⃗ \nabla =\vec{i}\frac{\partial}{\partial x}+\vec{j}\frac{\partial}{\partial y}+\vec{k}\frac{\partial}{\partial z}=\frac{\partial}{\partial x}\vec{i}+\frac{\partial}{\partial y}\vec{j}+\frac{\partial}{\partial z}\vec{k} ∇=i∂x∂+j∂y∂+k∂z∂=∂x∂i+∂y∂j+∂z∂k
或:
∇ = e ⃗ 1 ∂ ∂ x 1 + e ⃗ 2 ∂ ∂ x 2 + e ⃗ 3 ∂ ∂ x 3 \nabla =\vec{e}_1\frac{\partial}{\partial x_1}+\vec{e}_2\frac{\partial}{\partial x_2}+\vec{e}_3\frac{\partial}{\partial x_3} ∇=e1∂x1∂+e2∂x2∂+e3∂x3∂
式中: e ⃗ 1 = i ⃗ , e ⃗ 2 = j ⃗ , e ⃗ 3 = k ⃗ , x 1 = x , x 2 = y , x 3 = z \vec{e}_1=\vec{i},\vec{e}_2=\vec{j},\vec{e}_3=\vec{k},x_1=x,x_2=y,x_3=z e1=i,e2=j,e3=k,x1=x,x2=y,x3=z; i ⃗ , j ⃗ , k ⃗ \vec{i},\vec{j},\vec{k} i,j,k或 e ⃗ 1 , e ⃗ 2 , e ⃗ 3 \vec{e}_1,\vec{e}_2,\vec{e}_3 e1,e2,e3称为沿着直角坐标(系)的单位基向量或单位基矢量,简称单位向量或单位矢量。
∇ \nabla ∇既是一个微分算子,又可以看作一个向量,具有向量和微分的双重性质,故它称为向量微分算子或矢量微分算子。于是,梯度可表示为:
g r a d φ = ∇ φ = G ⃗ = ∂ φ ∂ x i ⃗ + ∂ φ ∂ y j ⃗ + ∂ φ ∂ z k ⃗ \mathrm{grad}\varphi =\nabla \varphi =\vec{G}=\frac{\partial \varphi}{\partial x}\vec{i}+\frac{\partial \varphi}{\partial y}\vec{j}+\frac{\partial \varphi}{\partial z}\vec{k} gradφ=∇φ=G=∂x∂φi+∂y∂φj+∂z∂φk
可见:一个标量函数 φ \varphi φ的梯度是一个向量函数。
梯度的模为:
∣ g r a d φ ∣ = ∣ ∇ φ ∣ = ∣ G ⃗ ∣ = ( ∂ φ ∂ x ) 2 + ( ∂ φ ∂ y ) 2 + ( ∂ φ ∂ z ) 2 \left| \mathrm{grad}\varphi \right|=\left| \nabla \varphi \right|=\left| \vec{G} \right|=\sqrt{\left( \frac{\partial \varphi}{\partial x} \right) ^2+\left( \frac{\partial \varphi}{\partial y} \right) ^2+\left( \frac{\partial \varphi}{\partial z} \right) ^2} ∣gradφ∣=∣∇φ∣= G =(∂x∂φ)2+(∂y∂φ)2+(∂z∂φ)2
梯度的运算性质:
设 c c c为常数, φ 、 ψ 、 f ( φ ) 、 f ( ψ ) \varphi \text{、}\psi \text{、}f\left( \varphi \right) \text{、}f\left( \psi \right) φ、ψ、f(φ)、f(ψ)都是点 M M M的标量函数, r ⃗ \vec{r} r是任意矢径, r r r是 r ⃗ \vec{r} r的模, r ⃗ 0 \vec{r}_0 r0是 r ⃗ \vec{r} r的单位向量,则梯度运算基本公式如下:
∇ c = 0 ∇ ( φ ± ψ ) = ∇ φ ± ∇ ψ ∇ ( c φ ) = c ∇ φ ∇ ( φ ψ ) = ψ ∇ φ + φ ∇ ψ ∇ ( φ ψ ) = ψ ∇ φ − φ ∇ ψ ψ 2 ∇ f ( φ ) = f ′ ( φ ) ∇ φ ∇ f ( r ) = f ′ ( r ) ∇ r = f ′ ( r ) r ⃗ r = f ′ ( r ) r ⃗ 0 \nabla c=0 \\ \nabla \left( \varphi \pm \psi \right) =\nabla \varphi \pm \nabla \psi \\ \nabla \left( c\varphi \right) =c\nabla \varphi \\ \nabla \left( \varphi \psi \right) =\psi \nabla \varphi +\varphi \nabla \psi \\ \nabla \left( \frac{\varphi}{\psi} \right) =\frac{\psi \nabla \varphi -\varphi \nabla \psi}{\psi ^2} \\ \nabla f\left( \varphi \right) =f\prime\left( \varphi \right) \nabla \varphi \\ \nabla f\left( r \right) =f\prime\left( r \right) \nabla r=f\prime\left( r \right) \frac{\vec{r}}{r}=f\prime\left( r \right) \vec{r}_0 ∇c=0∇(φ±ψ)=∇φ±∇ψ∇(cφ)=c∇φ∇(φψ)=ψ∇φ+φ∇ψ∇(ψφ)=ψ2ψ∇φ−φ∇ψ∇f(φ)=f′(φ)∇φ∇f(r)=f′(r)∇r=f′(r)rr=f′(r)r0
证明:(待补充)
进一步可知:
∇ f ( n ) ( r ) = f ( n + 1 ) ( r ) ∇ r ∂ φ ∂ L = g r a d φ ⋅ L ⃗ 0 = ∇ φ ⋅ L ⃗ 0 \nabla f^{\left( n \right)}\left( r \right) =f^{\left( n+1 \right)}\left( r \right) \nabla r \\ \frac{\partial \varphi}{\partial L}=\mathrm{grad}\varphi \cdot \vec{L}_0=\nabla \varphi \cdot \vec{L}_0 ∇f(n)(r)=f(n+1)(r)∇r∂L∂φ=gradφ⋅L0=∇φ⋅L0
上式表明,函数 φ \varphi φ沿 L L L方向的导数等于φ的梯度与L方向的单位向量 L ⃗ 0 \vec{L}_0 L0的数量积。
若函数 φ ( x , y , z ) = C \varphi \left( x,y,z \right) =C φ(x,y,z)=C,则该式称为等值面方程,它表示一族曲面,与常数 C C C对应的每个值都表示一个曲面。在每个曲面上的各点,虽然坐标值不同,但函数值却相等,这些曲面称为函数 φ \varphi φ的等值面。同理,若函数 ψ ( x , y ) = C \psi \left( x,y \right) =C ψ(x,y)=C,则该式称为等值线方程,它表示一族曲线,与常数 C C C对应的每个值都表示一条曲线,这些曲线称为函数 ψ \psi ψ的等值线。因为函数 φ \varphi φ沿其等值面保持不变,所以当向量 L ⃗ 0 \vec{L}_0 L0在函数 φ \varphi φ的等值面上时,或者说向量 L ⃗ 0 \vec{L}_0 L0是等值面的切线时,有:
∂ φ ∂ L = g r a d φ ⋅ L ⃗ 0 = 0 \frac{\partial \varphi}{\partial L}=\mathrm{grad}\varphi \cdot \vec{L}_0=0 ∂L∂φ=gradφ⋅L0=0
即在切线方向上函数 φ \varphi φ的方向导数为零,这表明梯度向量 g r a d φ \mathrm{grad}\varphi gradφ与等值面的法线重合。由于函数 φ \varphi φ沿着梯度向量的方向增加得最快,故可知梯度向量指向函数 φ \varphi φ增加的方向,即函数 φ \varphi φ的等值面的法线方向,用 N ⃗ \vec{N} N表示法线方向。法线方向上的单位向量称为单位法线向量或单位法向量,通常用 n ⃗ \vec{n} n来表示单位法向量。因为任意一个向量都可以表示为该向量的模乘以与该向量方向相同的单位向量,所以,函数 φ \varphi φ的等值面的单位法向量 n ⃗ \vec{n} n可表示为:
n ⃗ = G ⃗ ∣ G ⃗ ∣ = g r a d φ ∣ g r a d φ ∣ = ∇ φ ∣ ∇ φ ∣ \vec{n}=\frac{\vec{G}}{\left| \vec{G} \right|}=\frac{\mathrm{grad}\varphi}{\left| \mathrm{grad}\varphi \right|}=\frac{\nabla \varphi}{\left| \nabla \varphi \right|} n= G G=∣gradφ∣gradφ=∣∇φ∣∇φ
函数 φ \varphi φ的等值面的单位法向量 n ⃗ \vec{n} n还可表示为:
n ⃗ = cos ( N ⃗ , i ⃗ ) i ⃗ + cos ( N ⃗ , j ⃗ ) j ⃗ + + cos ( N ⃗ , k ⃗ ) k ⃗ = cos α i ⃗ + cos β j ⃗ + cos γ k ⃗ = l i ⃗ + m j ⃗ + n k ⃗ e ⃗ 1 , e ⃗ 2 , e ⃗ 3 = n x i ⃗ + n y j ⃗ + n z k ⃗ = n x e ⃗ 1 + n y , e ⃗ 2 + n z e ⃗ 3 \vec{n}=\cos \left( \vec{N},\vec{i} \right) \vec{i}+\cos \left( \vec{N},\vec{j} \right) \vec{j}++\cos \left( \vec{N},\vec{k} \right) \vec{k} \\ =\cos \alpha \vec{i}+\cos \beta \vec{j}+\cos \gamma \vec{k}=l\vec{i}+m\vec{j}+n\vec{k}\vec{e}_1,\vec{e}_2,\vec{e}_3 \\ =n_x\vec{i}+n_{\mathrm{y}}\vec{j}+n_{\mathrm{z}}\vec{k}=n_x\vec{e}_1+n_{\mathrm{y}},\vec{e}_2+n_{\mathrm{z}}\vec{e}_3 n=cos(N,i)i+cos(N,j)j++cos(N,k)k=cosαi+cosβj+cosγk=li+mj+nke1,e2,e3=nxi+nyj+nzk=nxe1+ny,e2+nze3
式中: α , β , γ \alpha ,\beta ,\gamma α,β,γ为 φ \varphi φ的等值面的法向向量与三个坐标轴的夹角—— l = n 1 = n x = cos α 、 m = n 2 = n y = cos β 、 n = n 3 = n z = cos γ l=n_1=n_x=\cos \alpha \text{、}m=n_2=n_y=\cos \beta \text{、}n=n_3=n_z=\cos \gamma l=n1=nx=cosα、m=n2=ny=cosβ、n=n3=nz=cosγ分别为单位法向量 n ⃗ \vec{n} n的三个方向余弦;
单位法向量 n ⃗ \vec{n} n的模可表示为: ∣ n ⃗ ∣ = cos 2 ( N ⃗ , x ) + cos 2 ( N ⃗ , y ) + cos 2 ( N ⃗ , z ) \left| \vec{n} \right|=\sqrt{\cos ^2\left( \vec{N},x \right) +\cos ^2\left( \vec{N},y \right) +\cos ^2\left( \vec{N},z \right)} ∣n∣=cos2(N,x)+cos2(N,y)+cos2(N,z)
如果用不用的形式来表示,则函数 φ \varphi φ沿 N ⃗ \vec{N} N方向的导数可写成下面诸形式:
∂ φ ∂ N ⃗ = G ⃗ ⋅ n ⃗ = ∣ G ⃗ ∣ cos ( G ⃗ , n ⃗ ) = ∣ G ⃗ ∣ = g r a d φ ⋅ n ⃗ = ∇ φ ⋅ n ⃗ = ∣ g r a d φ ∣ n ⃗ ⋅ n ⃗ = g r a d φ ⋅ g r a d φ ∣ g r a d φ ∣ = ∇ φ ⋅ ∇ φ ∣ ∇ φ ∣ = ∣ g r a d φ ∣ = ∇ φ \frac{\partial \varphi}{\partial \vec{N}}=\vec{G}\cdot \vec{n}=\left| \vec{G} \right|\cos \left( \vec{G},\vec{n} \right) =\left| \vec{G} \right|=\mathrm{grad}\varphi \cdot \vec{n}=\nabla \varphi \cdot \vec{n} \\ =\left| \mathrm{grad}\varphi \right|\vec{n}\cdot \vec{n}=\frac{\mathrm{grad}\varphi \cdot \mathrm{grad}\varphi}{\left| \mathrm{grad}\varphi \right|}=\frac{\nabla \varphi \cdot \nabla \varphi}{\left| \nabla \varphi \right|}=\left| \mathrm{grad}\varphi \right|=\nabla \varphi ∂N∂φ=G⋅n= G cos(G,n)= G =gradφ⋅n=∇φ⋅n=∣gradφ∣n⋅n=∣gradφ∣gradφ⋅gradφ=∣∇φ∣∇φ⋅∇φ=∣gradφ∣=∇φ
函数 φ \varphi φ沿梯度方向的方向导数恒大于等于零,即梯度总是指向函数 φ \varphi φ增大的方向。显然有 cos ( G ⃗ , n ⃗ ) = cos 0 = 1 \cos \left( \vec{G},\vec{n} \right) =\cos 0=1 cos(G,n)=cos0=1,即 φ \varphi φ的梯度方向与 φ \varphi φ的等值面的法向方向相同。在直角坐标系中,函数 φ \varphi φ沿 N ⃗ \vec{N} N方向的方向导数还可写成如下形式:
∂ φ ∂ N ⃗ = ∇ φ ⋅ n ⃗ = ∂ φ ∂ x n x + ∂ φ ∂ y n y + ∂ φ ∂ z n z = ∣ ∇ φ ∣ = ( ∂ φ ∂ x ) 2 + ( ∂ φ ∂ y ) 2 + ( ∂ φ ∂ z ) 2 \frac{\partial \varphi}{\partial \vec{N}}=\nabla \varphi \cdot \vec{n}=\frac{\partial \varphi}{\partial x}n_{\mathrm{x}}+\frac{\partial \varphi}{\partial y}n_{\mathrm{y}}+\frac{\partial \varphi}{\partial z}n_{\mathrm{z}}=\left| \nabla \varphi \right|=\sqrt{\left( \frac{\partial \varphi}{\partial x} \right) ^2+\left( \frac{\partial \varphi}{\partial y} \right) ^2+\left( \frac{\partial \varphi}{\partial z} \right) ^2} ∂N∂φ=∇φ⋅n=∂x∂φnx+∂y∂φny+∂z∂φnz=∣∇φ∣=(∂x∂φ)2+(∂y∂φ)2+(∂z∂φ)2
进而可得: g r a d φ = ∇ φ = ∂ φ ∂ N ⃗ n ⃗ \mathrm{grad}\varphi =\nabla \varphi =\frac{\partial \varphi}{\partial \vec{N}}\vec{n} gradφ=∇φ=∂N∂φn,且有: ∂ ∂ N ⃗ = n ⃗ ⋅ ∇ = l ∂ ∂ x + m ∂ ∂ y + n ∂ ∂ z = n x ∂ ∂ x + n y ∂ ∂ y + n z ∂ ∂ z \frac{\partial}{\partial \vec{N}}=\vec{n}\cdot \nabla =l\frac{\partial}{\partial x}+m\frac{\partial}{\partial y}+n\frac{\partial}{\partial z}=n_{\mathrm{x}}\frac{\partial}{\partial x}+n_{\mathrm{y}}\frac{\partial}{\partial y}+n_{\mathrm{z}}\frac{\partial}{\partial z} ∂N∂=n⋅∇=l∂x∂+m∂y∂+n∂z∂=nx∂x∂+ny∂y∂+nz∂z∂
其中: ∂ ∂ N ⃗ \frac{\partial}{\partial \vec{N}} ∂N∂称为微分算子
- 把数量场中每一点的梯度与该数量场中的各点对应起来,就得到一个向量场,这个向量场称为由该数量场产生的梯度场。
设有向量场 a ⃗ \vec{a} a,若存在单值函数 φ \varphi φ 满足 a ⃗ = ∇ φ \vec{a}=\nabla \varphi a=∇φ ,则向量场 a ⃗ \vec{a} a称为有势场。 φ \varphi φ称为有势场 a ⃗ \vec{a} a的标量位势,简称标(量)势。若函数 ψ = − φ \psi =-\varphi ψ=−φ ,则 ψ \psi ψ 称为有势场 a ⃗ \vec{a} a的势函数或位函数,可见,有势场 a ⃗ \vec{a} a与势函数 ψ \psi ψ的关系为: a ⃗ = − ∇ ψ \vec{a}=-\nabla \psi a=−∇ψ
- 有势场是一个梯度场,它有无穷多个势函数,这些势函数之间只差一个常数。
相关文章:

[足式机器人]Part3 变分法Ch01-1 数学预备知识——【读书笔记】
本文仅供学习使用 本文参考: 《变分法基础-第三版》老大中 《变分学讲义》张恭庆 《Calculus of Variations of Optimal Control Theory》-变分法和最优控制论-Daneil Liberzon Ch01-1 数学基础-预备知识1 1 数学基础-预备知识1.1 泰勒公式1.1.1 一元函数的泰勒公式…...
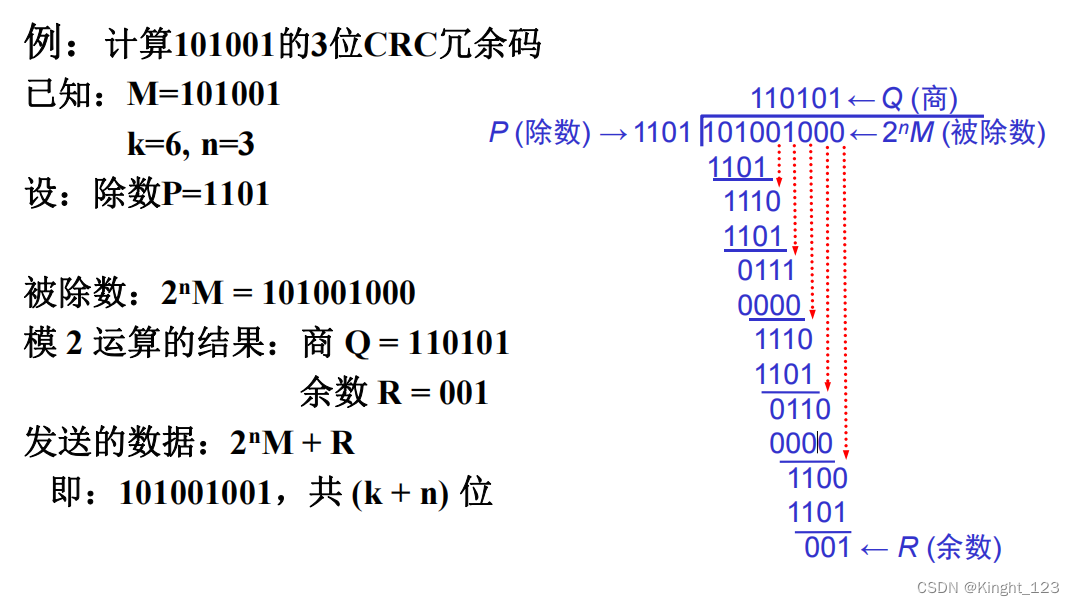
计算机网络----CRC冗余码的运算
目录 1. 冗余码的介绍及原理2. CRC检验编码的例子3. 小练习 1. 冗余码的介绍及原理 冗余码是用于在数据链路层的通信链路和传输数据过程中可能会出错的一种检错编码方法(检错码)。原理:发送发把数据划分为组,设每组K个比特&#…...
将Nginx源码数组结构(ngx_array.c)和内存池代码单独编译运行,附代码
在上面一篇的基础上把Nginx源码数组结构也摘录下来,也增加了测试代码,编译运行。 https://blog.csdn.net/katerdaisy/article/details/132358883 《将nginx内存池代码单独编译运行,了解nginx内存池工作原理,附代码》 核心代码&…...
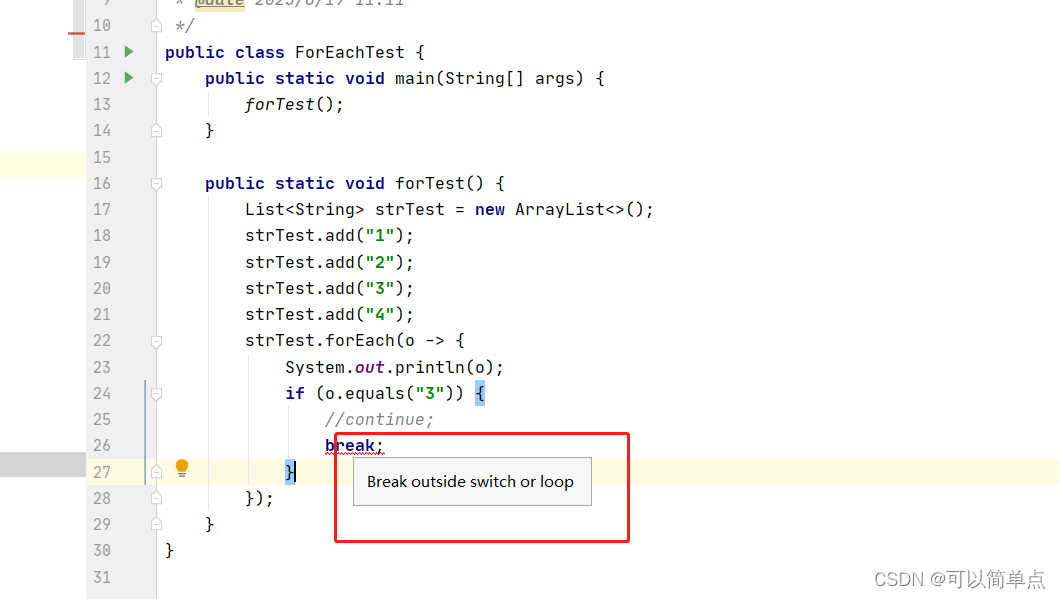
java forEach中不能使用break和continue的原因
1.首先了解break和continue的使用范围和作用 1.1使用范围 break适用范围:只能用于switch或者是循环语句中。当然可以用于增强for循环。 continue适用范围: 用于循环语句中。 1.2作用 break: 1. break用于switch语句的作用是结束一个switch语句。 2. break用于循…...

[杂项]水浒英雄谱系列电影列表
年份 片名 导演 主演 2006-01-01 母夜叉孙二娘 张建亚 周海媚 、 莫少聪 、 于承惠 [1] 2008-01-01 碧瑶霜迷案 黄祖权 陈龙 、 陈德容 、 翁家明 [7] 2008-05-09 青面兽杨志 张建亚 吕良伟 、 计春华 、 孟广美 [2] 2008-05-09 扈三娘与矮脚虎王英 张建亚 曾宝仪 、 郭德纲 、…...

6.RocketMQ之索引文件ConsumeQueue
本文着重分析为consumequeue/topic/queueId目录下的索引文件。 1.ConsumeQueueStore public class ConsumeQueueStore {protected final ConcurrentMap<String>, ConcurrentMap<Integer>, ConsumeQueueInterface>> consumeQueueTable;public boolean load(…...

【C++学习手札】一文带你认识C++虚继承
食用指南:本文在有C基础的情况下食用更佳 🍀本文前置知识:C虚函数(很重要,内部剖析) ♈️今日夜电波:僕らのつづき—柊優花 1:06 ━━━━━━️💟──────── 3:51 …...

神经网络基础-神经网络补充概念-63-残差网络
概念 残差网络(Residual Network,ResNet)是一种深度卷积神经网络结构,旨在解决深层网络训练中的梯度消失和梯度爆炸问题,以及帮助训练非常深的网络。ResNet 在2015年被提出,其核心思想是引入了"残差块…...
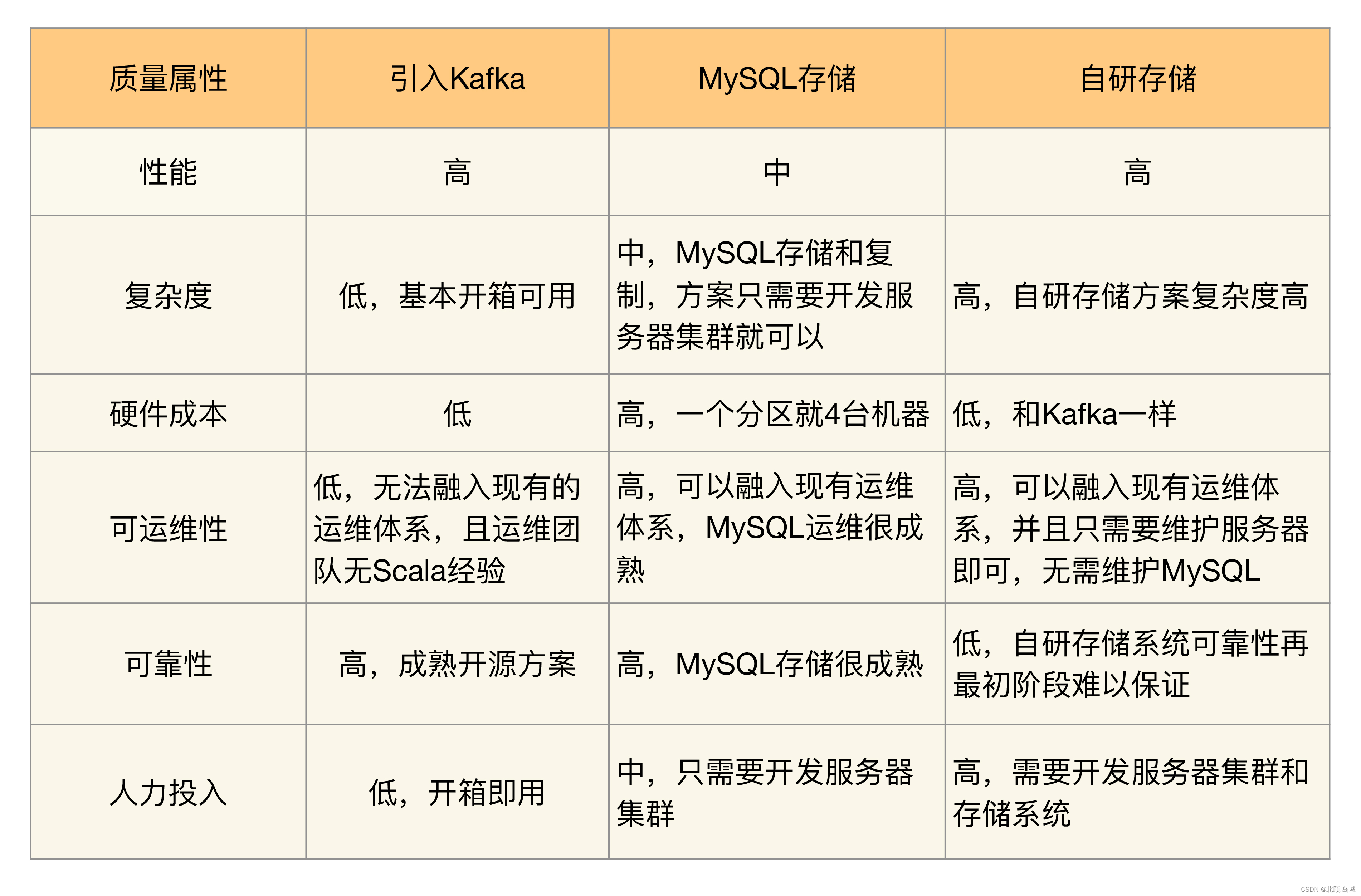
【从0开始学架构笔记】01 基础架构
文章目录 一、架构的定义1. 系统与子系统2. 模块与组件3. 框架与架构4. 重新定义架构 二、架构设计的目的三、复杂度来源:高性能1. 单机复杂度2. 集群复杂度2.1 任务分配2.2 任务分解(微服务) 四、复杂度来源:高可用1. 计算高可用…...
vue3+ts+vite使用el-breadcrumb实现面包屑组件,实现面包屑过渡动画
简介 使用 element-plus 的 el-breadcrumb 组件,实现根据页面路由动态生成面包屑导航,并实现面包屑导航的切换过渡动画 一、先看效果加粗样式 1.1 静态效果 1.2 动态效果 二、全量代码 <script lang"ts" setup> import { ref, watch…...
【Java 动态数据统计图】动态数据统计思路案例(动态,排序,数组)四(116)
需求::前端根据后端的返回数据:画统计图; 1.动态获取地域数据以及数据中的平均值,按照平均值降序排序; 说明: X轴是动态的,有对应区域数据则展示; X轴 区域数据降序排序…...

Chrome命令行开关
Electron 支持的命令行开关 –client-certificatepath 设置客户端的证书文件 path . –ignore-connections-limitdomains 忽略用 , 分隔的 domains 列表的连接限制. –disable-http-cache 禁止请求 HTTP 时使用磁盘缓存. –remote-debugging-portport 在指定的 端口 通…...

元宇宙赛道加速破圈 和数软件抓住“元宇宙游戏”发展新风口
当下海外游戏市场仍然具备较大的增长空间。据机构预测,至2025年全球移动游戏市场规模将达1606亿美元,对应2020-2025年复合增长率11%。与此同时,随着元宇宙概念持续升温,国内外多家互联网巨头纷纷入场。行业分析平台New…...

Vue的鼠标键盘事件
Vue的鼠标键盘事件 原生 鼠标事件(将v-on简写为) click // 点击 dblclick // 双击 mousedown // 按下 mousemove // 移动 mouseleave // 离开 mouseout // 移出 mouseenter // 进入 mouseover // 鼠标悬浮mousedown.left 键盘事件 keydown //键盘按下时触发 keypress …...

Bytebase 2.6.0 - 支持通过 LDAP 配置 SSO,支持 RisingWave 数据库
🚀 新功能 支持通过 LDAP 配置 SSO。支持增加多个只读连接。Schema 模版支持列类型约束。支持 RisingWave 数据库。库表同步功能支持 TiDB。数据脱敏功能支持 SQL Server。SQL 审核 CI 功能支持 Azure DevOps。 🎄 改进 支持设置数据库的环境与所属实…...
C# 读取pcd、ply点云文件数据
最近研究了下用pcl读取点云数据,又做了个C#的dll,方便读取,同样这个dll基于pcl 最新版本1.13.1版本开发。 上次做的需要先得到点云长度,再获取数据。这次这个定义了一个PointCloudXYZ类来存数据。将下面的dll拷贝到可执行目录下&a…...

LeetCode1387 将整数按权重排序
思路 首先是这种计算权重的方式很有可能出现重复,所以需要记忆化搜索记忆化搜索:先查表再计算,先存表再返回。将整数 x 和计算的权重分别存储数组的0和1的位置重写compare将数组排序按规则排序返回结果 代码 class Solution {private Hash…...

正则表达式--Intellij IDEA常用的替换
原文网址:正则表达式--Intellij IDEA常用的替换_IT利刃出鞘的博客-CSDN博客 简介 本文介绍IDEA使用正则表达式进行替换时的常用的一些示例。 根据注释加注解 需求 将 /*** abc*/ 改为: /*** abc*/ ApiModelOperation("abc") 方法 选…...
前端如何安全的渲染HTML字符串?
在现代的Web 应用中,动态生成和渲染 HTML 字符串是很常见的需求。然而,不正确地渲染HTML字符串可能会导致安全漏洞,例如跨站脚本攻击(XSS)。为了确保应用的安全性,我们需要采取一些措施来在安全的环境下渲染…...

C++学习第十四天----for循环
1.递增/递减运算符和指针 将*和同时用于指针的优先级? 答:前缀递增,前缀递减和解除引用运算符的优先级相同,以从右到左的方式进行结合;后缀递增和后缀递减的优先级相同,但比前缀运算符的优先级高࿰…...

SpringBoot-17-MyBatis动态SQL标签之常用标签
文章目录 1 代码1.1 实体User.java1.2 接口UserMapper.java1.3 映射UserMapper.xml1.3.1 标签if1.3.2 标签if和where1.3.3 标签choose和when和otherwise1.4 UserController.java2 常用动态SQL标签2.1 标签set2.1.1 UserMapper.java2.1.2 UserMapper.xml2.1.3 UserController.ja…...
)
椭圆曲线密码学(ECC)
一、ECC算法概述 椭圆曲线密码学(Elliptic Curve Cryptography)是基于椭圆曲线数学理论的公钥密码系统,由Neal Koblitz和Victor Miller在1985年独立提出。相比RSA,ECC在相同安全强度下密钥更短(256位ECC ≈ 3072位RSA…...

在HarmonyOS ArkTS ArkUI-X 5.0及以上版本中,手势开发全攻略:
在 HarmonyOS 应用开发中,手势交互是连接用户与设备的核心纽带。ArkTS 框架提供了丰富的手势处理能力,既支持点击、长按、拖拽等基础单一手势的精细控制,也能通过多种绑定策略解决父子组件的手势竞争问题。本文将结合官方开发文档,…...

《Playwright:微软的自动化测试工具详解》
Playwright 简介:声明内容来自网络,将内容拼接整理出来的文档 Playwright 是微软开发的自动化测试工具,支持 Chrome、Firefox、Safari 等主流浏览器,提供多语言 API(Python、JavaScript、Java、.NET)。它的特点包括&a…...

FastAPI 教程:从入门到实践
FastAPI 是一个现代、快速(高性能)的 Web 框架,用于构建 API,支持 Python 3.6。它基于标准 Python 类型提示,易于学习且功能强大。以下是一个完整的 FastAPI 入门教程,涵盖从环境搭建到创建并运行一个简单的…...
Linux相关概念和易错知识点(42)(TCP的连接管理、可靠性、面临复杂网络的处理)
目录 1.TCP的连接管理机制(1)三次握手①握手过程②对握手过程的理解 (2)四次挥手(3)握手和挥手的触发(4)状态切换①挥手过程中状态的切换②握手过程中状态的切换 2.TCP的可靠性&…...
Android 之 kotlin 语言学习笔记三(Kotlin-Java 互操作)
参考官方文档:https://developer.android.google.cn/kotlin/interop?hlzh-cn 一、Java(供 Kotlin 使用) 1、不得使用硬关键字 不要使用 Kotlin 的任何硬关键字作为方法的名称 或字段。允许使用 Kotlin 的软关键字、修饰符关键字和特殊标识…...

Java多线程实现之Thread类深度解析
Java多线程实现之Thread类深度解析 一、多线程基础概念1.1 什么是线程1.2 多线程的优势1.3 Java多线程模型 二、Thread类的基本结构与构造函数2.1 Thread类的继承关系2.2 构造函数 三、创建和启动线程3.1 继承Thread类创建线程3.2 实现Runnable接口创建线程 四、Thread类的核心…...
回溯算法学习
一、电话号码的字母组合 import java.util.ArrayList; import java.util.List;import javax.management.loading.PrivateClassLoader;public class letterCombinations {private static final String[] KEYPAD {"", //0"", //1"abc", //2"…...
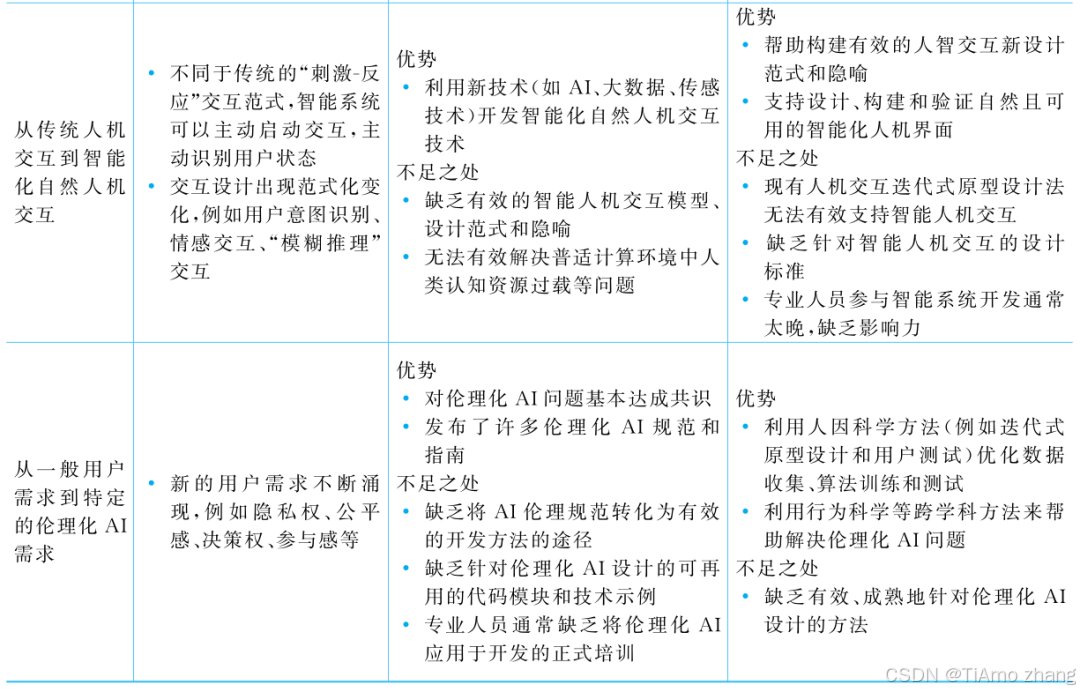
人机融合智能 | “人智交互”跨学科新领域
本文系统地提出基于“以人为中心AI(HCAI)”理念的人-人工智能交互(人智交互)这一跨学科新领域及框架,定义人智交互领域的理念、基本理论和关键问题、方法、开发流程和参与团队等,阐述提出人智交互新领域的意义。然后,提出人智交互研究的三种新范式取向以及它们的意义。最后,总结…...