利用OpenCV光流算法实现视频特征点跟踪
光流简介
光流(optical flow)是运动物体在观察成像平面上的像素运动的瞬时速度。光流法是利用图像序列中像素在时间域上的变化以及相邻帧之间的相关性来找到上一帧跟当前帧之间存在的对应关系,从而计算出相邻帧之间物体的运动信息的一种方法。通常将二维图像平面特定坐标点上的灰度瞬时变化率定义为光流矢量。光流是由物体或相机的运动引起的图像物体在连续两帧之间的明显运动的模式。它是 2D 矢量场,其中每个矢量是一个位移矢量,显示点从第一帧到第二帧的移动。
以下图片显示了计算出的光流示意图,颜色表示光流方向,颜色饱和度表示大小:

参考博文:
计算机视觉大型攻略 —— 光流(1)基本原理和经典算法_光流算法_linusyue的博客-CSDN博客
光流法(optical flow)简介_Fm镄的博客-CSDN博客
opencv光流实现
光流追踪的前提是:
1. 对象的像素强度在连续帧之间不会改变;
2. 相邻像素具有相似的运动。
OpenCV提供了两种算法计算光流:
cv::calcOpticalFlowPyrLK()---稀疏光流: 通过 Lucas-Kanade 方法计算稀疏特征集的光流(使用 Shi-Tomasi 算法检测到的角点
cv::calcOpticalFlowFarneback--密集光流: 通过 Gunner Farneback 来寻找密集光流。它计算帧中所有点的光流。
p1, st, err = cv2.calcOpticalFlowPyrLK(old_gray, frame_gray, p0, None, winSize=(15, 15), maxLevel=2, criteria=(cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03))
- old_gray: 上一帧单通道灰度图
- frame_gray: 下一帧单通道灰度图
- prePts:p0上一帧坐标pts
- nextPts: None
- winSize: 每个金字塔级别上搜索窗口的大小
- maxLevel: 最大金字塔层数
- criteria:指定迭代搜索算法的终止条件,在指定的最大迭代次数 10 之后或搜索窗口移动小于 0.03
flow = cv2.calcOpticalFlowFarneback(prvs, next, None, 0.5, 3, 15, 3, 5, 1.2, 0)
- prvs: 上一帧单通道灰度图
- next: 下一帧单通道灰度图
- flow: 流 None
- pyr_scale: 0.5经典金字塔,构建金字塔缩放scale
- level:3 初始图像的金字塔层数
- winsize:3 平均窗口大小,数值越大,算法对图像的鲁棒性越强
- iterations:15 迭代次数
- poly_n:5 像素邻域的参数多边形大小,用于在每个像素中找到多项式展开式;较大的值意味着图像将使用更平滑的曲面进行近似,从而产生更高的分辨率、鲁棒算法和更模糊的运动场;通常多边形n=5或7。
- poly_sigma:1.2 高斯标准差,用于平滑导数
- flags: 可以是以下操作标志的组合:OPTFLOW_USE_INITIAL_FLOW:使用输入流作为初始流近似值。OPTFLOW_FARNEBACK_GAUSSIAN: 使用GAUSSIAN过滤器而不是相同尺寸的盒过滤器;
源码实例
稀疏光流追踪
# 光流追踪
# 光流追踪的前提是:1. 对象的像素强度在连续帧之间不会改变;2. 相邻像素具有相似的运动。
# - cv2.goodFeaturesToTrack() 确定要追踪的特征点
# - cv2.calcOpticalFlowPyrLK() 追踪视频中的特征点# 取第一帧,检测其中的一些 Shi-Tomasi 角点,使用 Lucas-Kanade 光流迭代跟踪这些点。
# 对于函数 cv2.calcOpticalFlowPyrLK() 传递前一帧、前一个点和下一帧。它返回下一个点以及一些状态编号,如果找到下一个点,则值为 1,否则为零。
# 然后在下一步中迭代地将这些下一个点作为前一个点传递。# USAGE
# python video_optical_flow.pyimport imutils
import numpy as np
import cv2cap = cv2.VideoCapture('images/slow_traffic_small.mp4')# ShiTomasi角点检测的参数
feature_params = dict(maxCorners=100,qualityLevel=0.3,minDistance=7,blockSize=7)# Lucas Kanada光流检测的参数
lk_params = dict(winSize=(15, 15),maxLevel=2,criteria=(cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03))# 构建随机颜色
color = np.random.randint(0, 255, (100, 3))# 获取第一帧并发现角点
ret, old_frame = cap.read()
old_gray = cv2.cvtColor(old_frame, cv2.COLOR_BGR2GRAY)
p0 = cv2.goodFeaturesToTrack(old_gray, mask=None, **feature_params)# 为绘制光流追踪图,构建一个Mask
mask = np.zeros_like(old_frame)num = 0
while (1):ret, frame = cap.read()if not ret:breakframe_gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)# 使用迭代Lucas Kanade方法计算稀疏特征集的光流# - old_gray: 上一帧单通道灰度图# - frame_gray: 下一帧单通道灰度图# - prePts:p0上一帧坐标pts# - nextPts: None# - winSize: 每个金字塔级别上搜索窗口的大小# - maxLevel: 最大金字塔层数# - criteria:指定迭代搜索算法的终止条件,在指定的最大迭代次数criteria.maxCount之后或搜索窗口移动小于criteria.epsilonp1, st, err = cv2.calcOpticalFlowPyrLK(old_gray, frame_gray, p0, None, **lk_params)# 选择轨迹点good_new = p1[st == 1]good_old = p0[st == 1]# 绘制轨迹for i, (new, old) in enumerate(zip(good_new, good_old)):a, b = new.ravel()c, d = old.ravel()mask = cv2.line(mask, (a, b), (c, d), color[i].tolist(), 2)frame = cv2.circle(frame, (a, b), 5, color[i].tolist(), -1)img = cv2.add(frame, mask)cv2.imshow('frame', img)cv2.imwrite('videoof-imgs/' + str(num) + '.jpg', imutils.resize(img, 500))print(str(num))num = num + 1k = cv2.waitKey(30) & 0xffif k == 27:break# 更新之前的帧和点old_gray = frame_gray.copy()p0 = good_new.reshape(-1, 1, 2)cv2.destroyAllWindows()
cap.release()
改进版稀疏光流追踪
# 优化后的光流追踪—Lucas-Kanade tracker
# (当不见检查下一个关键点的正确程度时,即使图像中的任何特征点消失,光流也有可能找到下一个看起来可能靠近它的点。实际上对于稳健的跟踪,角点应该在特定的时间间隔内检测点。
# 找到特征点后,每 30 帧对光流点的向后检查,只选择好的。)
# Lucas Kanade稀疏光流演示。使用GoodFeatures跟踪用于跟踪初始化和匹配验证的回溯帧之间。
# Lucas-Kanade sparse optical flow demo. Uses goodFeaturesToTrack for track initialization and back-tracking for match verification between frames.# Usage
# pyhton lk_track.py images/slow_traffic_small.mp4
# 按 ESC键退出from __future__ import print_functionimport imutils
import numpy as np
import cv2def draw_str(dst, target, s):x, y = targetcv2.putText(dst, s, (x + 1, y + 1), cv2.FONT_HERSHEY_PLAIN, 1.0, (0, 0, 0), thickness=2, lineType=cv2.LINE_AA)cv2.putText(dst, s, (x, y), cv2.FONT_HERSHEY_PLAIN, 1.0, (255, 255, 255), lineType=cv2.LINE_AA)lk_params = dict(winSize=(15, 15),maxLevel=2,criteria=(cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03))feature_params = dict(maxCorners=500,qualityLevel=0.3,minDistance=7,blockSize=7)class App:def __init__(self, video_src):self.track_len = 10self.detect_interval = 30self.tracks = []self.cam = cv2.VideoCapture(video_src)self.frame_idx = 0def run(self):while True:_ret, frame = self.cam.read()if not _ret:breakframe_gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)vis = frame.copy()if len(self.tracks) > 0:img0, img1 = self.prev_gray, frame_grayp0 = np.float32([tr[-1] for tr in self.tracks]).reshape(-1, 1, 2)p1, _st, _err = cv2.calcOpticalFlowPyrLK(img0, img1, p0, None, **lk_params)p0r, _st, _err = cv2.calcOpticalFlowPyrLK(img1, img0, p1, None, **lk_params)d = abs(p0 - p0r).reshape(-1, 2).max(-1)good = d < 1new_tracks = []for tr, (x, y), good_flag in zip(self.tracks, p1.reshape(-1, 2), good):if not good_flag:continuetr.append((x, y))if len(tr) > self.track_len:del tr[0]new_tracks.append(tr)cv2.circle(vis, (x, y), 2, (0, 255, 0), -1)self.tracks = new_trackscv2.polylines(vis, [np.int32(tr) for tr in self.tracks], False, (0, 255, 0))draw_str(vis, (20, 20), 'track count: %d' % len(self.tracks))if self.frame_idx % self.detect_interval == 0:mask = np.zeros_like(frame_gray)mask[:] = 255for x, y in [np.int32(tr[-1]) for tr in self.tracks]:cv2.circle(mask, (x, y), 5, 0, -1)p = cv2.goodFeaturesToTrack(frame_gray, mask=mask, **feature_params)if p is not None:for x, y in np.float32(p).reshape(-1, 2):self.tracks.append([(x, y)])self.prev_gray = frame_graycv2.imshow('lk_track', vis)print(self.frame_idx)cv2.imwrite('videoOof-imgs/' + str(self.frame_idx) + '.jpg', imutils.resize(vis, 500))self.frame_idx += 1ch = cv2.waitKey(1)if ch == 27:breakdef main():import systry:video_src = sys.argv[1]except:video_src = 0App(video_src).run()print('Done')if __name__ == '__main__':print(__doc__)main()cv2.destroyAllWindows()
密集光流追踪
# OpenCV中的密集光流
# Lucas-Kanade 方法计算稀疏特征集的光流(使用 Shi-Tomasi 算法检测到的角点)。
# OpenCV 提供了另一种算法: Gunner Farneback 来寻找密集光流。它计算帧中所有点的光流。
# 通过cv2.calcOpticalFlowFarneback() 将得到一个带有光流向量 (u,v) 的 2 通道阵列。可以找到它们的大小和方向,然后对结果进行颜色编码以实现更好的可视化。
# 在HSV图像中,方向对应于图像的色调,幅度对应于价值平面。import cv2
import imutils
import numpy as npcap = cv2.VideoCapture('images/slow_traffic_small.mp4')ret, frame1 = cap.read()
prvs = cv2.cvtColor(frame1, cv2.COLOR_BGR2GRAY)
hsv = np.zeros_like(frame1)
hsv[..., 1] = 255num = 0
while (1):ret, frame2 = cap.read()if not ret:breaknext = cv2.cvtColor(frame2, cv2.COLOR_BGR2GRAY)# 使用迭代Gunner Farneback 方法计算密集特征的光流# - prvs: 上一帧单通道灰度图# - next: 下一帧单通道灰度图# - flow: 流 None# - pyr_scale: 0.5经典金字塔,构建金字塔缩放scale# - level:3 初始图像的金字塔层数# - winsize:3 平均窗口大小,数值越大,算法对图像的鲁棒性越强# - iterations:15 迭代次数# - poly_n:5 像素邻域的参数多边形大小,用于在每个像素中找到多项式展开式;较大的值意味着图像将使用更平滑的曲面进行近似,从而产生更高的分辨率、鲁棒算法和更模糊的运动场;通常多边形n=5或7。# - poly_sigma:1.2 高斯标准差,用于平滑导数# - flags: 可以是以下操作标志的组合:OPTFLOW_USE_INITIAL_FLOW:使用输入流作为初始流近似值。OPTFLOW_FARNEBACK_GAUSSIAN: 使用GAUSSIAN过滤器而不是相同尺寸的盒过滤器;flow = cv2.calcOpticalFlowFarneback(prvs, next, None, 0.5, 3, 15, 3, 5, 1.2, 0)mag, ang = cv2.cartToPolar(flow[..., 0], flow[..., 1])hsv[..., 0] = ang * 180 / np.pi / 2hsv[..., 2] = cv2.normalize(mag, None, 0, 255, cv2.NORM_MINMAX)rgb = cv2.cvtColor(hsv, cv2.COLOR_HSV2BGR)cv2.imshow('Origin VS frame2', np.hstack([frame2, rgb]))cv2.imwrite('dof-imgs/' + str(num) + '.jpg', imutils.resize(np.hstack([frame2, rgb]), 600))k = cv2.waitKey(30) & 0xffnum = num + 1if k == 27:breakelif k == ord('s'):cv2.imwrite('dof-imgs/origin VS dense optical flow HSVres' + str(num) + ".jpg",imutils.resize(np.hstack([frame2, rgb]), width=800))prvs = nextcap.release()
cv2.destroyAllWindows()相关文章:
利用OpenCV光流算法实现视频特征点跟踪
光流简介 光流(optical flow)是运动物体在观察成像平面上的像素运动的瞬时速度。光流法是利用图像序列中像素在时间域上的变化以及相邻帧之间的相关性来找到上一帧跟当前帧之间存在的对应关系,从而计算出相邻帧之间物体的运动信息的一种方法。…...
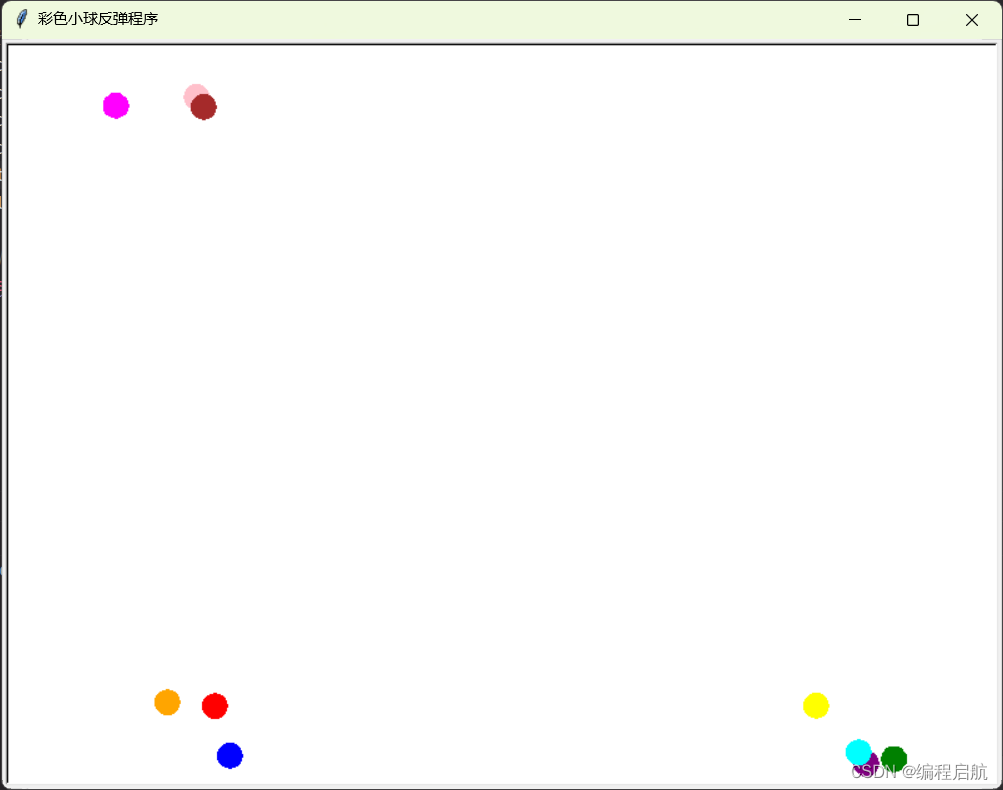
探索无限创造力的星辰大道,画出想象的浩瀚宇宙!-turtle
介绍 视频教程地址在此:https://www.bilibili.com/video/BV1Pm4y1H7Tb/ 大家好,欢迎来到本视频!今天,我们将一同探索Python编程世界中的一个有趣而创意的库——Turtle库。无需专业绘画技能,你就可以轻松地用代码绘制…...
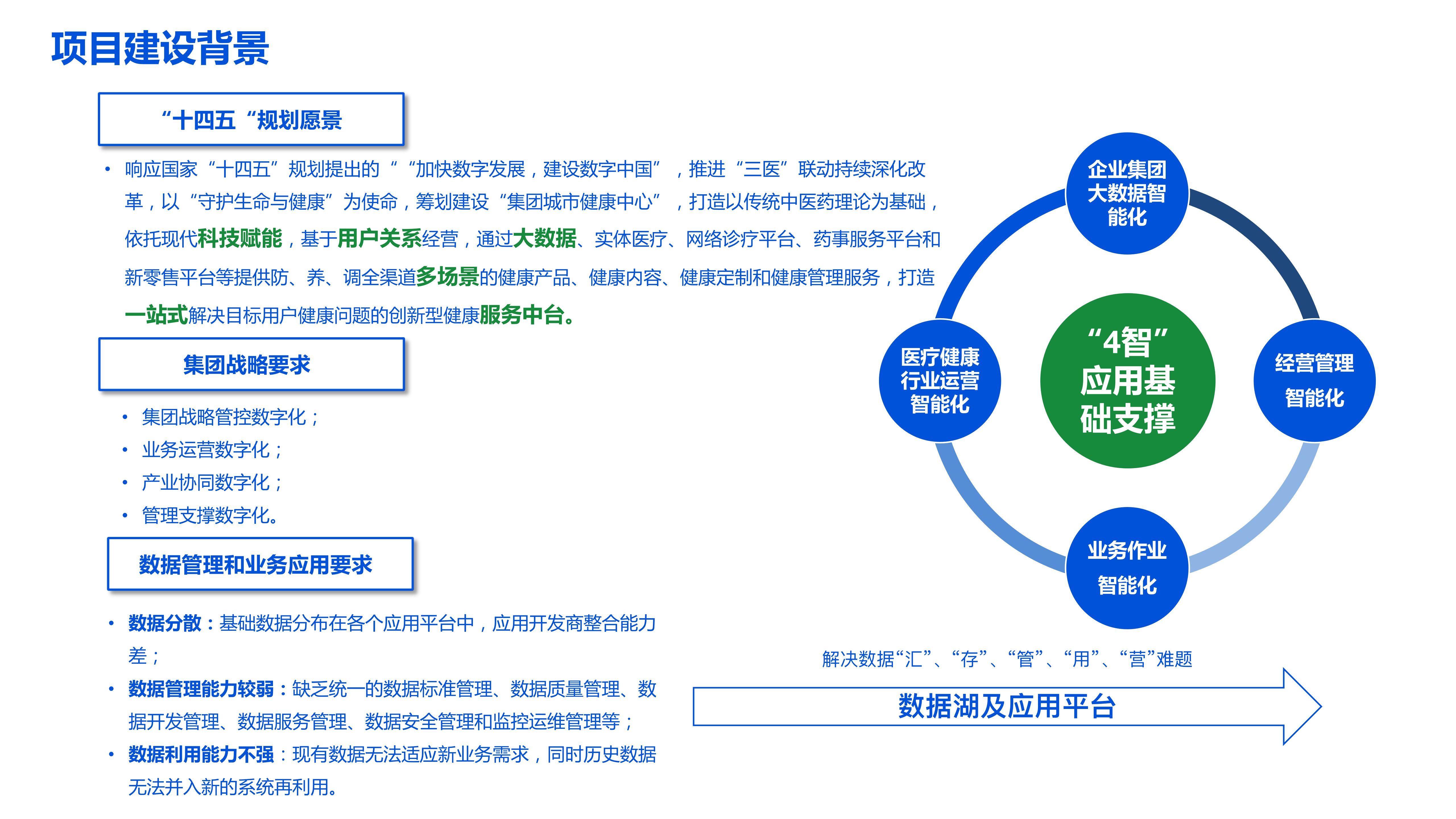
企业数字化转型大数据湖一体化平台项目建设方案PPT
导读:原文《企业数字化转型大数据湖一体化平台项目建设方案PPT》(获取来源见文尾),本文精选其中精华及架构部分,逻辑清晰、内容完整,为快速形成售前方案提供参考。 喜欢文章,您可以点赞评论转发…...
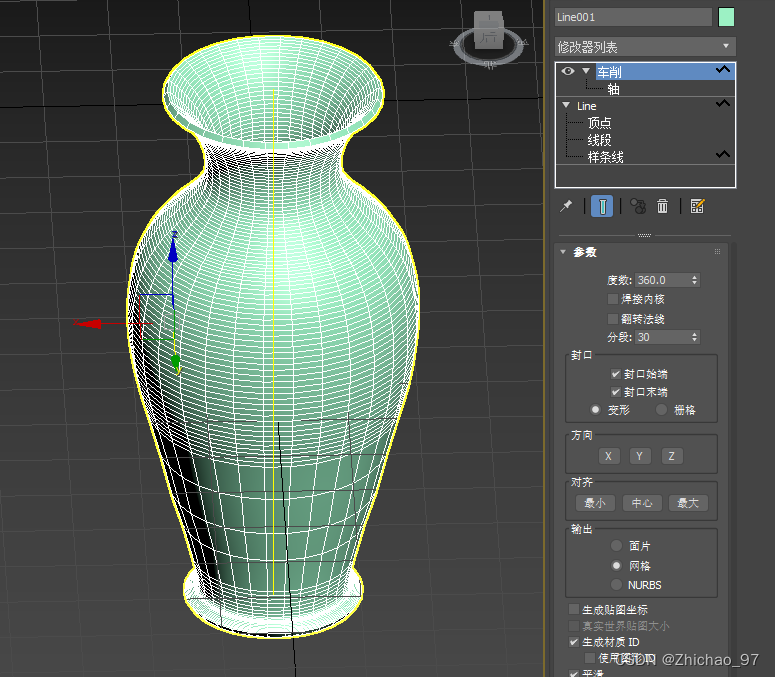
【3Ds Max】车削命令的简单使用(以制作花瓶为例)
简介 在3ds Max中,"车削"(Lathe)是一种建模命令,用于创建围绕轴线旋转的几何形状。通过车削命令,您可以将一个闭合的平面或曲线几何形状旋转,从而生成一个立体对象。这种方法常用于创建圆柱体、…...
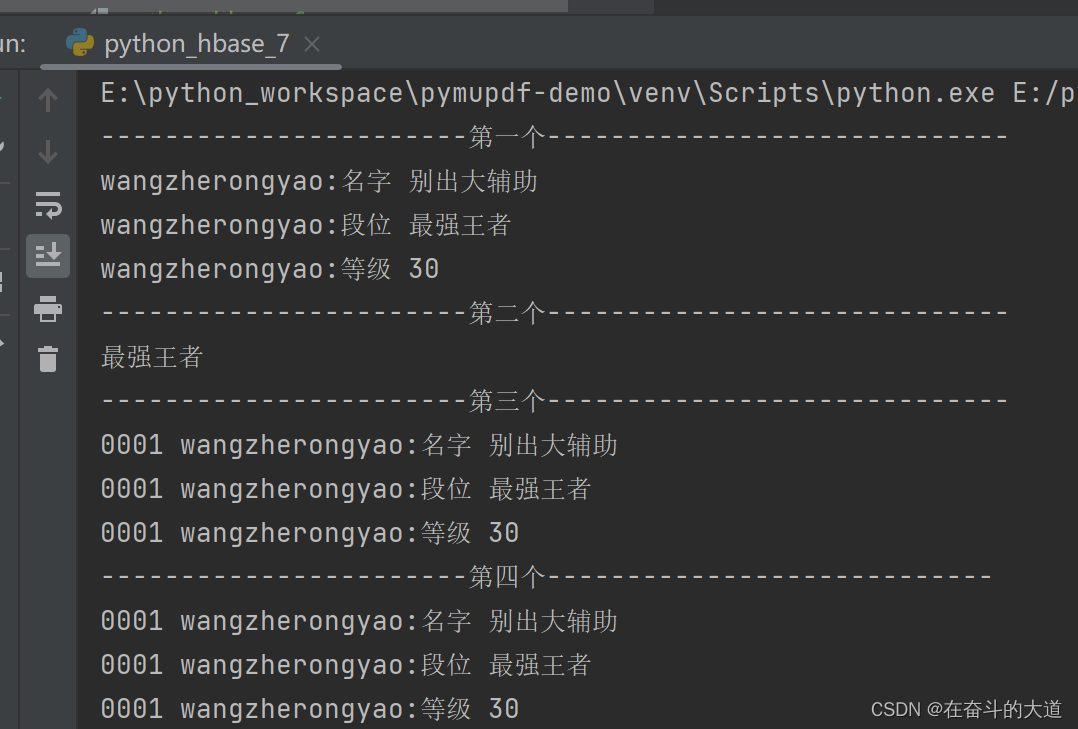
Python 3 使用HBase 总结
HBase 简介和安装 请参考文章:HBase 一文读懂 Python3 HBase API HBase 前期准备 1 安装happybase库操作hbase 安装该库 pip install happybase2 确保 Hadoop 和 Zookeeper 可用并开启 确保Hadoop 正常运行 确保Zookeeper 正常运行3 开启HBase thrift服务 使用命…...

Maven方式构建SpringBoot项目
目录 1、创建maven项目 2、添加springboot相关依赖 3、配置启动端口 4、修改APP文件 5、配置controller 6、启动应用 1、创建maven项目 项目如下: 2、添加springboot相关依赖 <parent><groupId>org.springframework.boot</groupId><arti…...
不花一分钱,利用免费电脑软件将视频MV变成歌曲音频MP3
教程 1.点击下载电脑软件下载地址,点击下载,安装。(没有利益关系,没有打广告,只是单纯教学) 2.安装完成后,点击格式工厂 3.然后如图所示依次,点击【音频】->【-MP3】 3.然后点击…...
触达用户的几种方式)
运营知识之用户运营(一)触达用户的几种方式
运营知识之用户运营(一)触达用户的几种方式 APP推送短信(DeepLink/Deferred DeepLink):短信拉起app电子邮件 EDM电话/外呼(人工、AI)电话外呼加短信(操作步骤短链)微信生…...

cocos creator pageView 循环展示 广告牌功能
在使用 creator pageView 滑动到最大或者最小为止的时候 滑动不了没法流畅的运行到最开始或者最后那个界面 循环展示 1.策划大人有需要就是要循环流畅的展示 解决方案: 做预制件的时候 最第一个界面之前 做一个最后的界面放到最前边去 比如 1,2,3,4,5,6,7,8 修改成 8,1…...
PyTorch Lightning:通过分布式训练扩展深度学习工作流
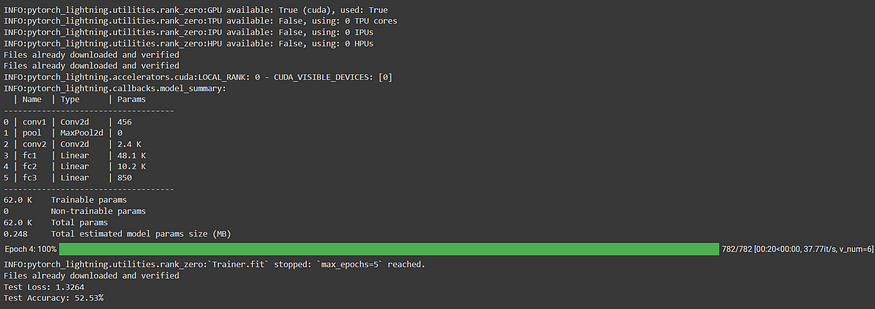
一、介绍 欢迎来到我们关于 PyTorch Lightning 系列的第二篇文章!在上一篇文章中,我们向您介绍了 PyTorch Lightning,并探讨了它在简化深度学习模型开发方面的主要功能和优势。我们了解了 PyTorch Lightning 如何为组织和构建 PyTorch 代码提…...

无涯教程-Perl - splice函数
描述 此函数从LENGTH元素的OFFSET元素中删除ARRAY元素,如果指定,则用LIST替换删除的元素。如果省略LENGTH,则从OFFSET开始删除所有内容。 语法 以下是此函数的简单语法- splice ARRAY, OFFSET, LENGTH, LISTsplice ARRAY, OFFSET, LENGTHsplice ARRAY, OFFSET返回值 该函数…...
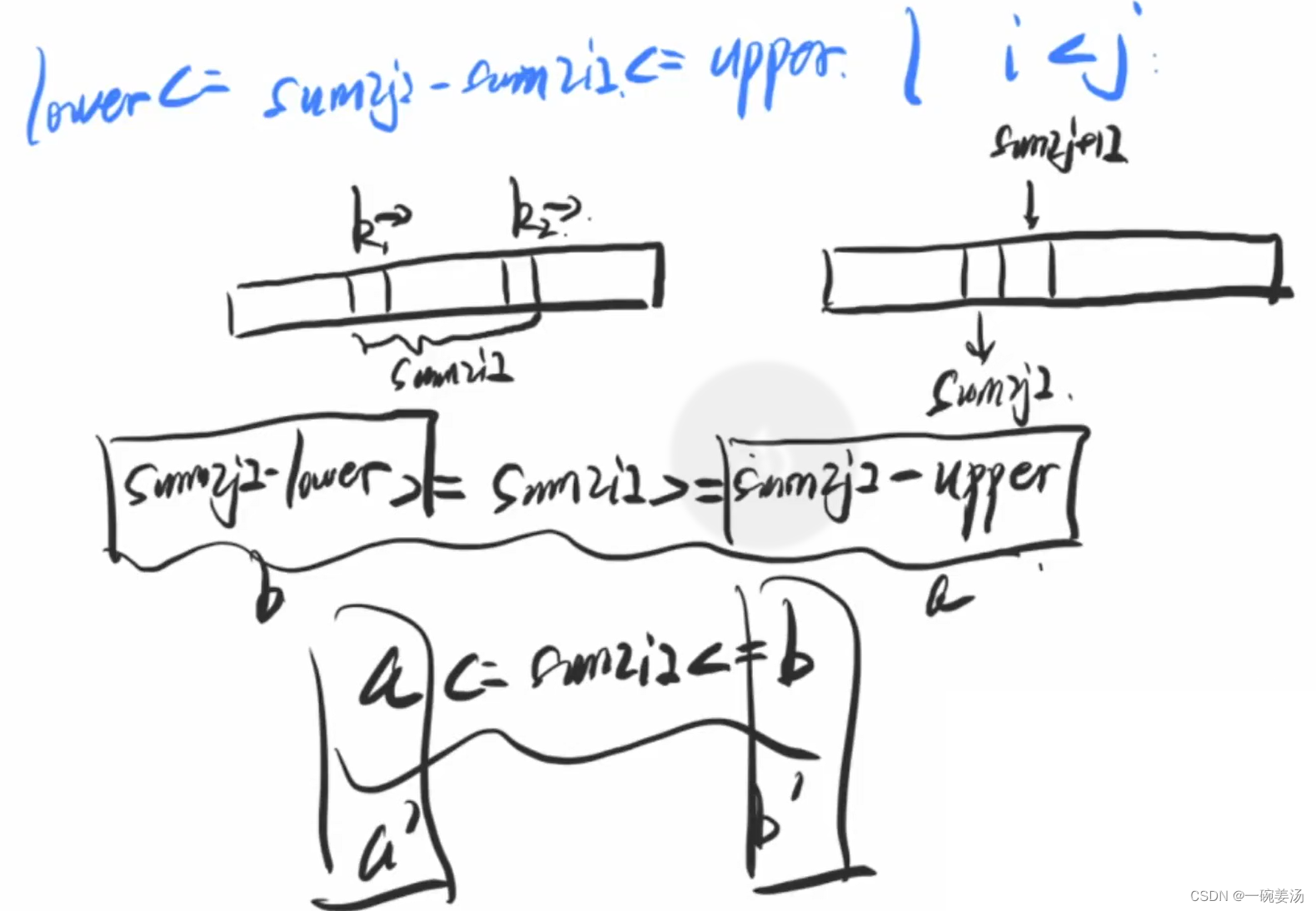
归并排序:从二路到多路
前言 我们所熟知的快速排序和归并排序都是非常优秀的排序算法。 但是快速排序和归并排序的一个区别就是:快速排序是一种内部排序,而归并排序是一种外部排序。 简单理解归并排序:递归地拆分,回溯过程中,将排序结果进…...

【Vue】运行项目报错 This dependency was not found
背景 运行Vue 项目报错,提示This dependency was not found;然后我根据提示 执行 npm install --save vue/types/umd ,执行后发现错误,我一开始一直以为是我本地装不上这个依赖。后来找了资料后,看到应该是自己的代码里面随意的i…...
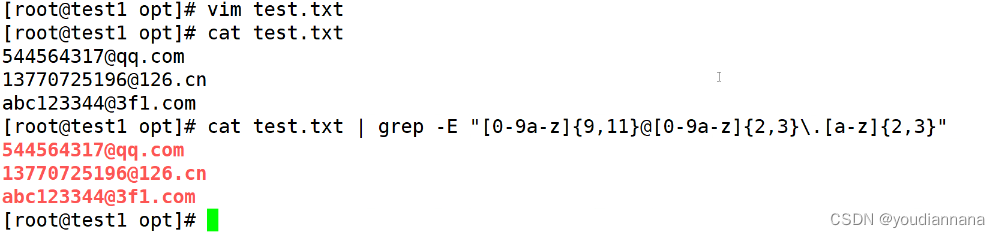
Shell编程之正则表达式
文本处理器:三剑客:grep查找sed awk shell正则表达式由一类特殊字符以及文本字符所编写的一种模式,处理文本当中的内容,其中的一些字符不表示字符的字面含义表示一种控制或者通配的功能 通配符:匹配文件名和目录名&a…...
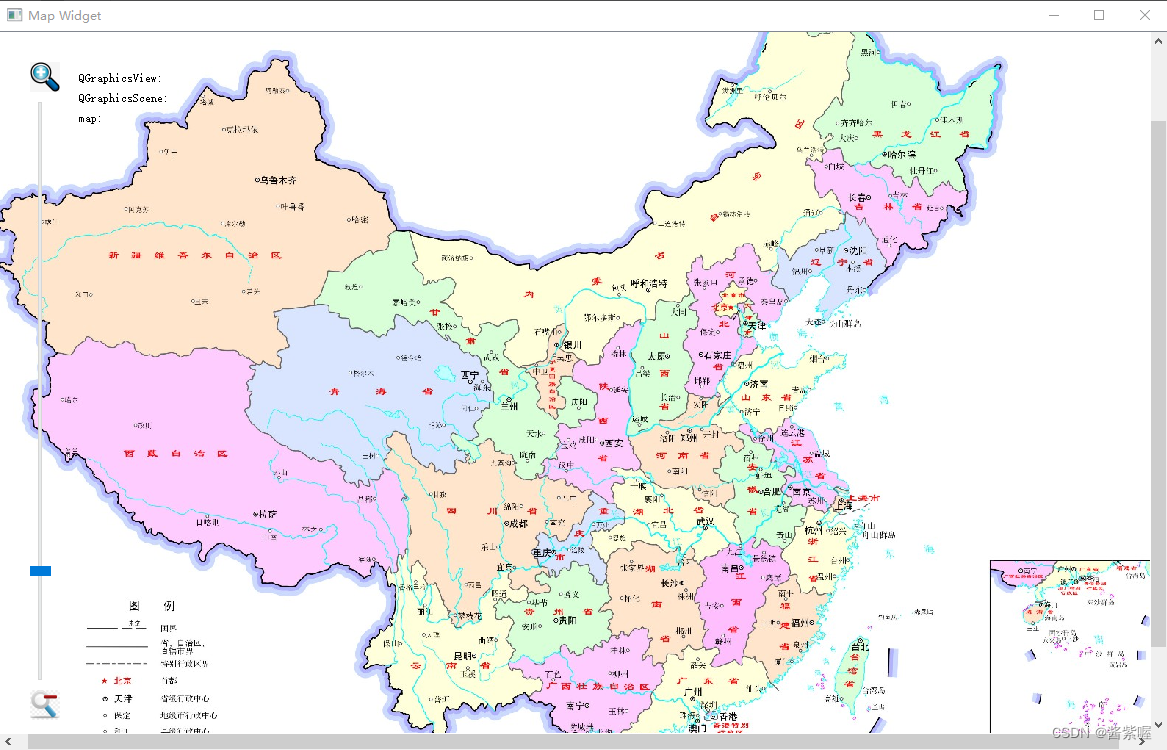
QGraphicsView 实例3地图浏览器
主要介绍Graphics View框架,实现地图的浏览、放大、缩小,以及显示各个位置的视图、场景和地图坐标 效果图: mapwidget.h #ifndef MAPWIDGET_H #define MAPWIDGET_H #include <QLabel> #include <QMouseEvent> #include <QGraphicsView&…...
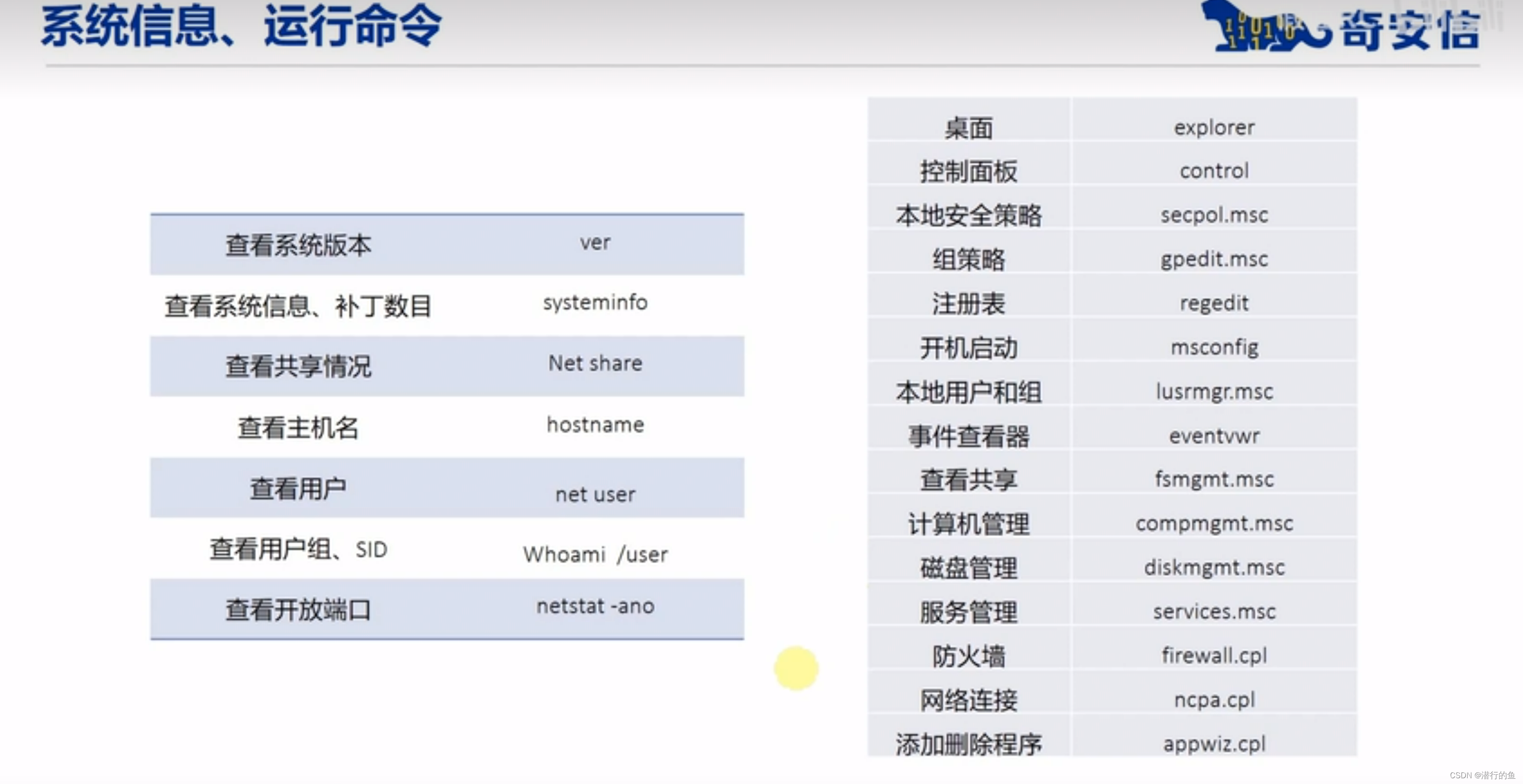
Windows基础安全知识
目录 常用DOS命令 ipconfig ping dir cd net user 常用DOS命令 内置账户访问控制 Windows访问控制 安全标识符 访问控制项 用户账户控制 UAC令牌 其他安全配置 本地安全策略 用户密码策略复杂性要求 强制密码历史: 禁止密码重复使用 密码最短使用期限…...

自定义注解和自定义注解处理器来扫描所有带有某个特定注解的Controller层
在Spring Boot中,您可以使用自定义注解和自定义注解处理器来扫描所有带有某个特定注解的Controller层。 以下是一个简单的示例,演示如何实现这个功能: 首先,创建自定义注解 CustomAnnotation ,用于标记需要被扫描的C…...
浏览器渲染原理 - 输入url 回车后发生了什么
目录 渲染时间点渲染流水线1,解析(parse)HTML1.1,DOM树1.2,CSSOM树1.3,解析时遇到 css 是怎么做的1.4,解析时遇到 js 是怎么做的 2,样式计算 Recalculate style3,布局 la…...

大文本的全文检索方案附件索引
一、简介 Elasticsearch附件索引是需要插件支持的功能,它允许将文件内容附加到Elasticsearch文档中,并对这些附件内容进行全文检索。本文将带你了解索引附件的原理和使用方法,并通过一个实际示例来说明如何在Elasticsearch中索引和检索文件附…...
35_windows环境debug Nginx 源码-CLion配置CMake和启动
文章目录 生成 CMakeLists.txt 组态档35_windows环境debug Nginx 源码-CLion配置CMake和启动生成 CMakeLists.txt 组态档 修改auto目录configure文件,在 . auto/make 上边增加 . auto/cmake, 大概在 106 行。在 auto 目录下创建cmake 文件其内容如下: #!/usr/bin/env bash NG…...

工程地质软件市场:发展现状、趋势与策略建议
一、引言 在工程建设领域,准确把握地质条件是确保项目顺利推进和安全运营的关键。工程地质软件作为处理、分析、模拟和展示工程地质数据的重要工具,正发挥着日益重要的作用。它凭借强大的数据处理能力、三维建模功能、空间分析工具和可视化展示手段&…...
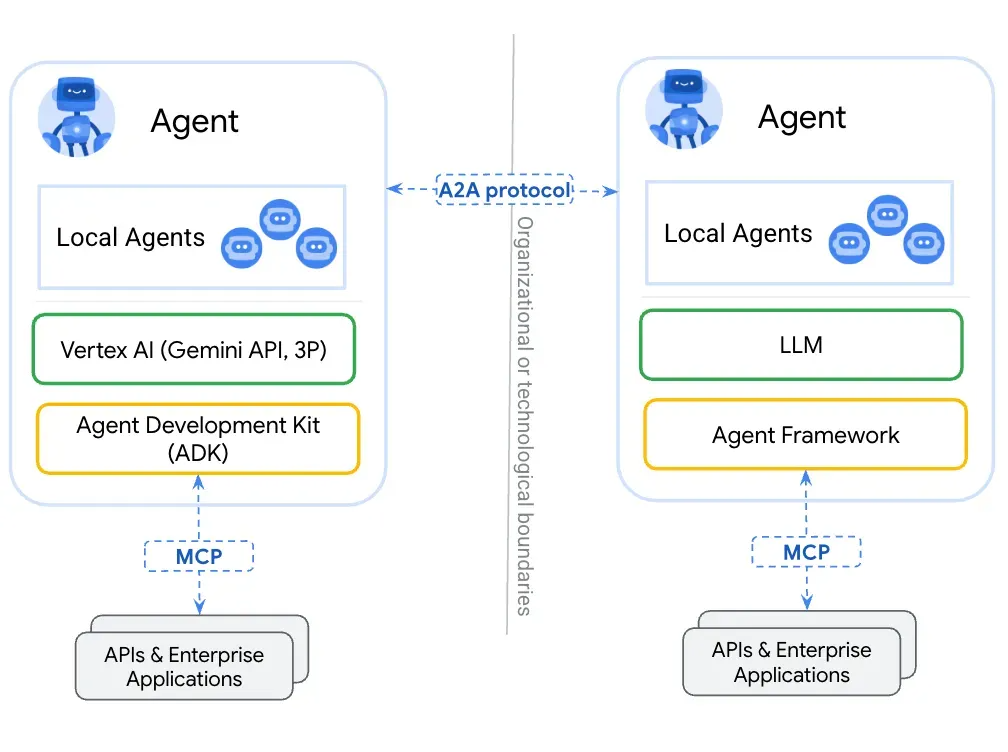
第一篇:Agent2Agent (A2A) 协议——协作式人工智能的黎明
AI 领域的快速发展正在催生一个新时代,智能代理(agents)不再是孤立的个体,而是能够像一个数字团队一样协作。然而,当前 AI 生态系统的碎片化阻碍了这一愿景的实现,导致了“AI 巴别塔问题”——不同代理之间…...

高防服务器能够抵御哪些网络攻击呢?
高防服务器作为一种有着高度防御能力的服务器,可以帮助网站应对分布式拒绝服务攻击,有效识别和清理一些恶意的网络流量,为用户提供安全且稳定的网络环境,那么,高防服务器一般都可以抵御哪些网络攻击呢?下面…...

React---day11
14.4 react-redux第三方库 提供connect、thunk之类的函数 以获取一个banner数据为例子 store: 我们在使用异步的时候理应是要使用中间件的,但是configureStore 已经自动集成了 redux-thunk,注意action里面要返回函数 import { configureS…...
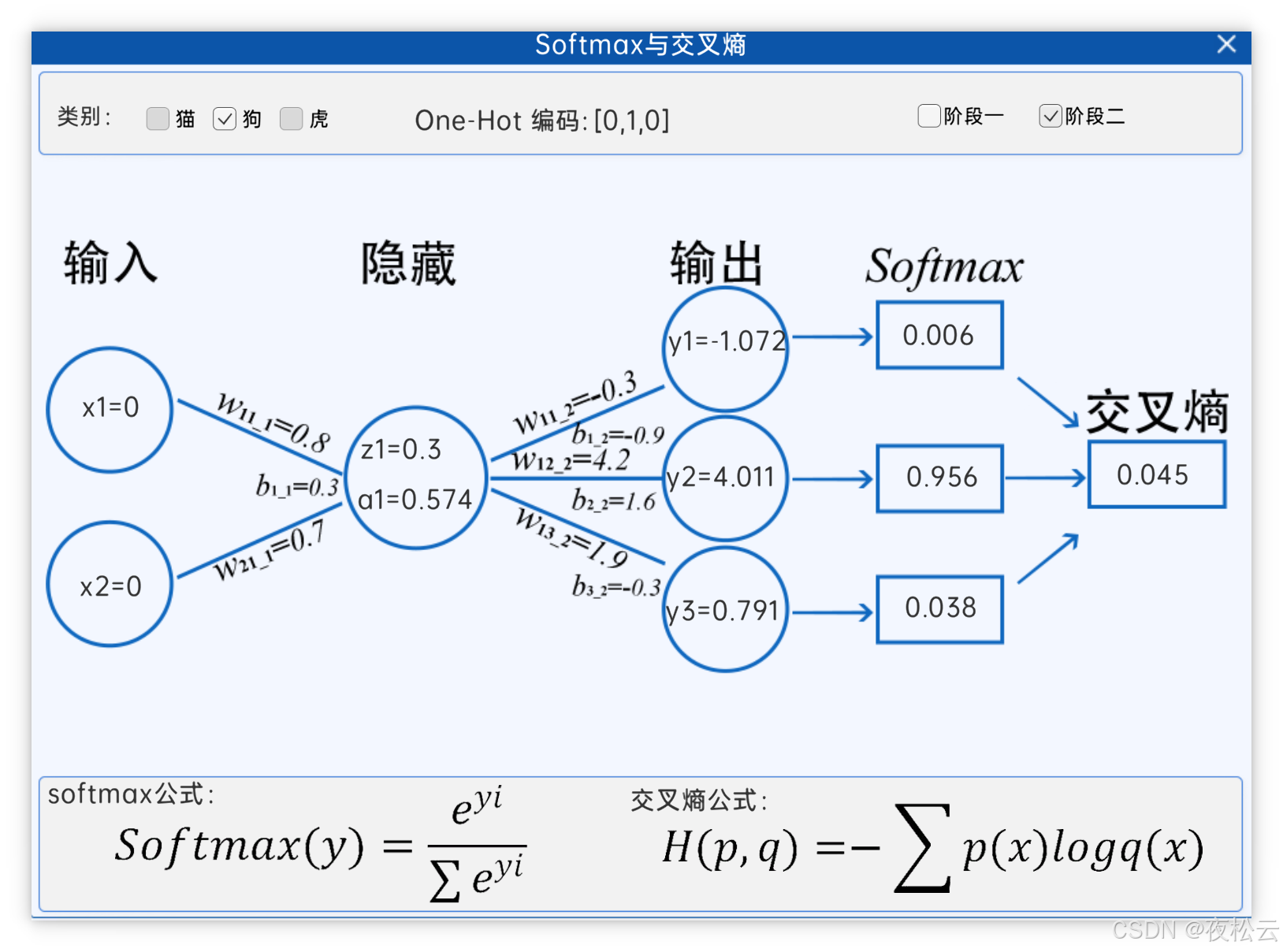
深入浅出深度学习基础:从感知机到全连接神经网络的核心原理与应用
文章目录 前言一、感知机 (Perceptron)1.1 基础介绍1.1.1 感知机是什么?1.1.2 感知机的工作原理 1.2 感知机的简单应用:基本逻辑门1.2.1 逻辑与 (Logic AND)1.2.2 逻辑或 (Logic OR)1.2.3 逻辑与非 (Logic NAND) 1.3 感知机的实现1.3.1 简单实现 (基于阈…...

如何更改默认 Crontab 编辑器 ?
在 Linux 领域中,crontab 是您可能经常遇到的一个术语。这个实用程序在类 unix 操作系统上可用,用于调度在预定义时间和间隔自动执行的任务。这对管理员和高级用户非常有益,允许他们自动执行各种系统任务。 编辑 Crontab 文件通常使用文本编…...
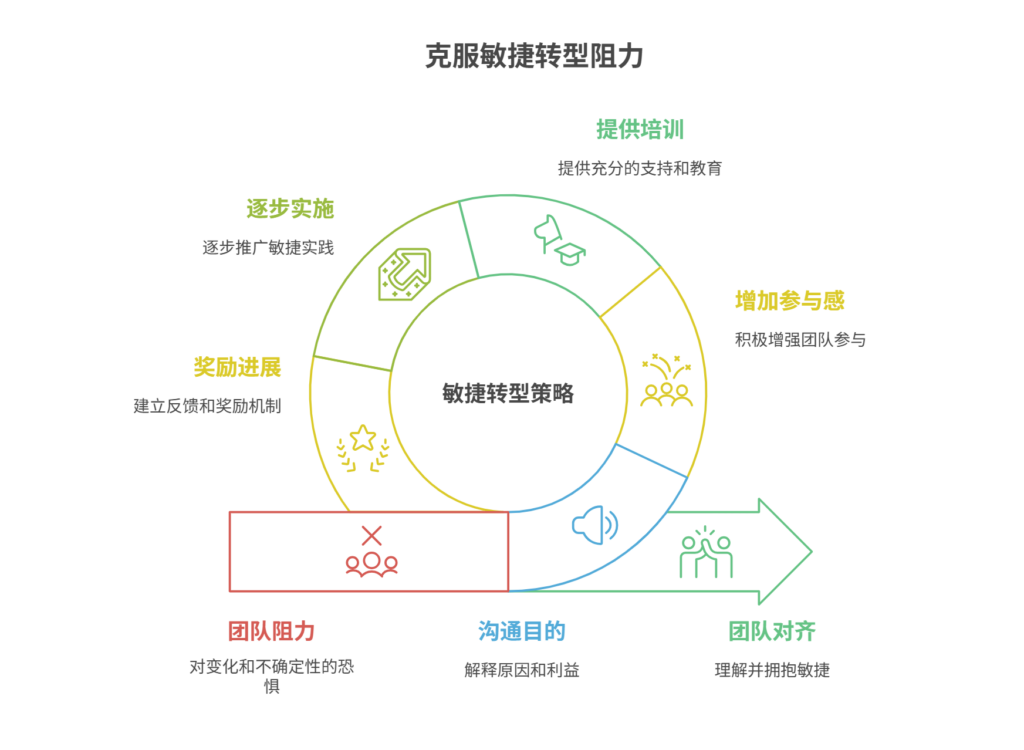
如何应对敏捷转型中的团队阻力
应对敏捷转型中的团队阻力需要明确沟通敏捷转型目的、提升团队参与感、提供充分的培训与支持、逐步推进敏捷实践、建立清晰的奖励和反馈机制。其中,明确沟通敏捷转型目的尤为关键,团队成员只有清晰理解转型背后的原因和利益,才能降低对变化的…...

Oracle11g安装包
Oracle 11g安装包 适用于windows系统,64位 下载路径 oracle 11g 安装包...
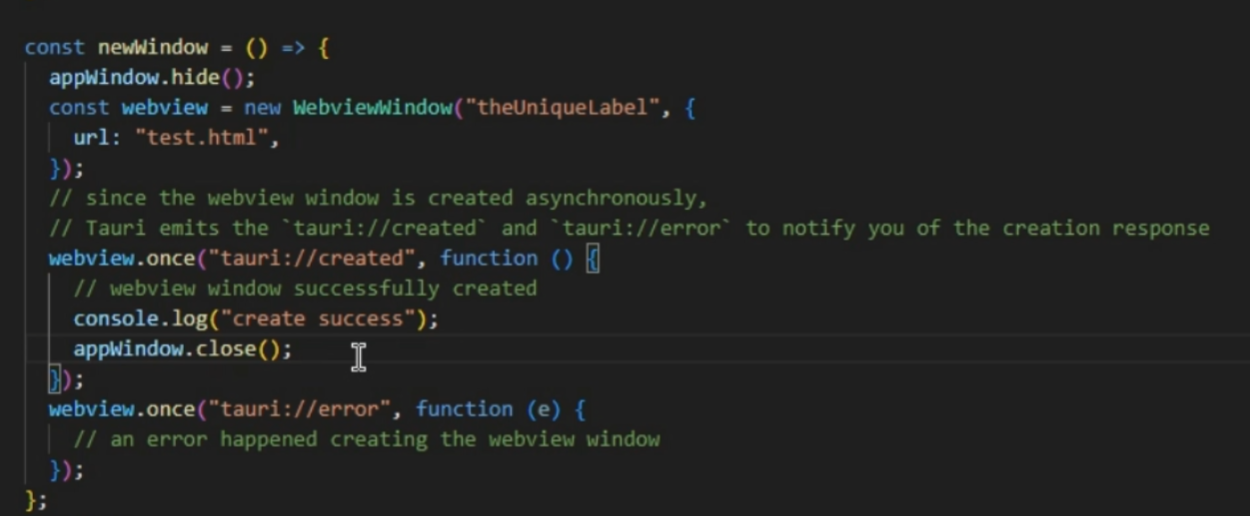
Tauri2学习笔记
教程地址:https://www.bilibili.com/video/BV1Ca411N7mF?spm_id_from333.788.player.switch&vd_source707ec8983cc32e6e065d5496a7f79ee6 官方指引:https://tauri.app/zh-cn/start/ 目前Tauri2的教程视频不多,我按照Tauri1的教程来学习&…...

Springboot 高校报修与互助平台小程序
一、前言 随着我国经济迅速发展,人们对手机的需求越来越大,各种手机软件也都在被广泛应用,但是对于手机进行数据信息管理,对于手机的各种软件也是备受用户的喜爱,高校报修与互助平台小程序被用户普遍使用,为…...