(7)(7.6) 恢复任务回放
文章目录
前言
7.6.1 配置
7.6.2 工作原理
7.6.3 局限性

前言
本页介绍了什么是"任务继续时后退"功能以及如何使用该功能。
!Note
从 4.1 版起,Plane、Copter 和 Rover 均可使用此功能。
在某些应用或运行区域,为了消除冲突,通常会中断任务,方法是切换到另一种模式,并使飞行器偏离计划的任务路径。当准备继续执行任务时,飞行器的正常行为是直接飞行/驾驶到任务中加载的最后一个"活动"航点。这种行为如下图所示:
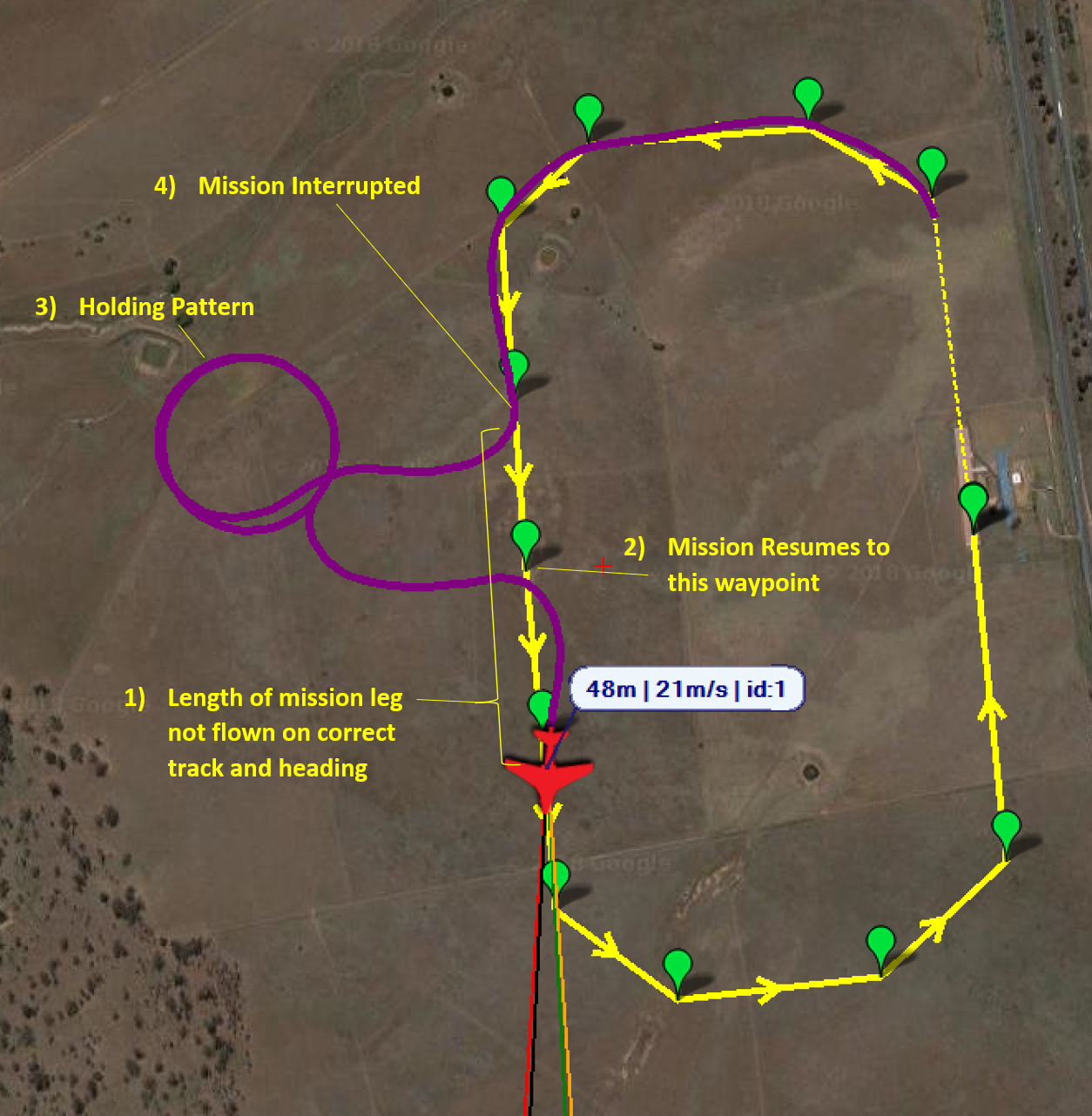
可以看出,这使得计划飞行任务的很大一部分要么被错误的航迹和航向覆盖,要么根本没有覆盖。这对于数据收集任务(如勘测)来说是个问题,导致需要重复执行任务。
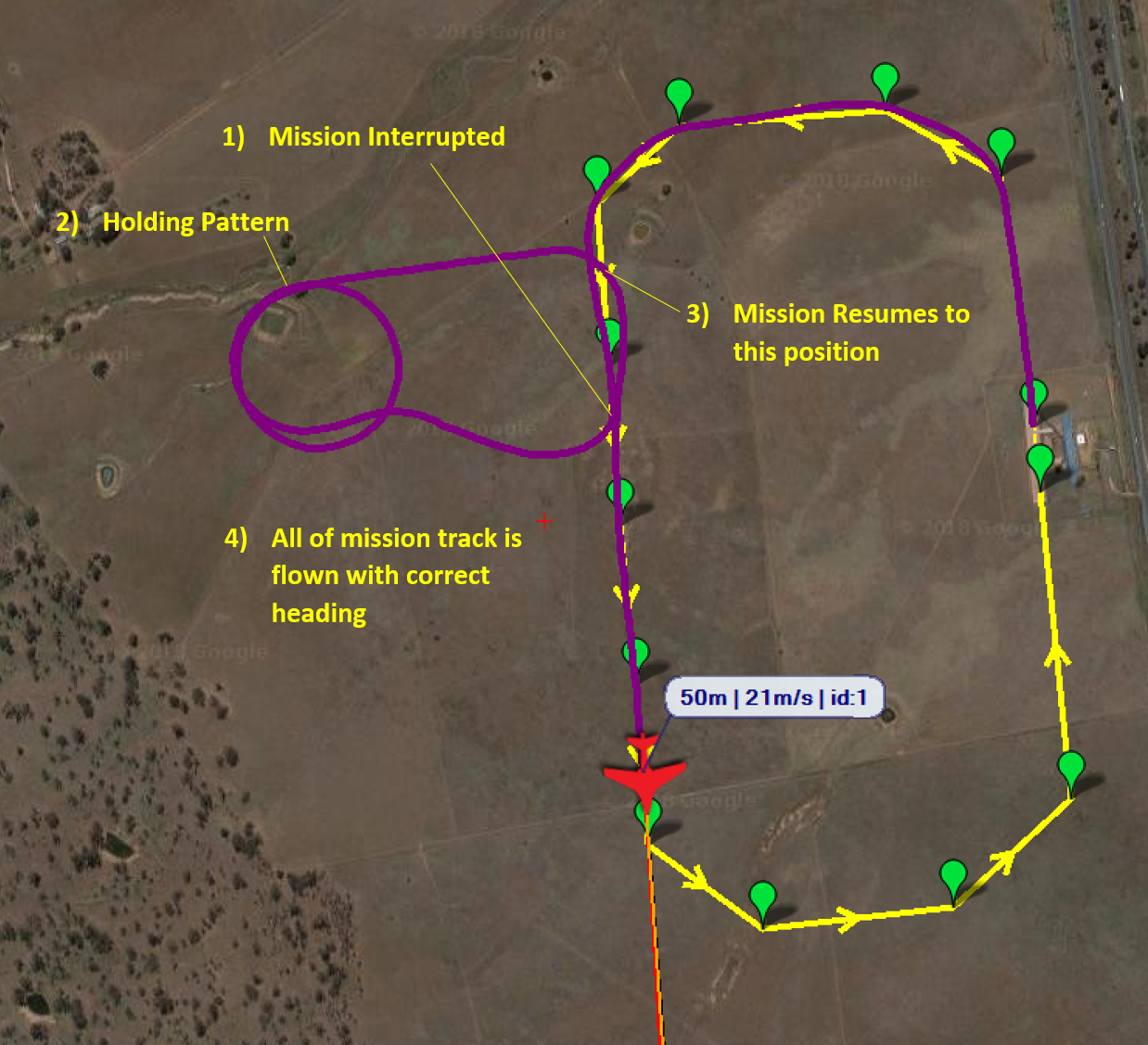
恢复时倒带(rewind-on-resume)功能可以纠正这种行为。后退距离由操作员定义。当飞行任务恢复时,飞行器将在飞行任务中断点后方所需的距离内返回飞行任务轨道。这样,飞行器在到达最初中断的位置之前,就有足够的时间达到所需的轨道和航向。这种行为如下所示:
7.6.1 配置
通过设置 DO_SET_RESUME_REPEAT_DIST 任务项,可以启用恢复时倒带功能。有两种方法可供选择:
1) 地面控制站识别DO_SET_RESUME_REPEAT_DIST任务项目
- 在任务中希望启用该功能的位置添加 DO_SET_RESUME_REPEAT_DIST 任务项;
- 将第一列数据设置为任务恢复时的倒带距离(以米为单位)。
2) 地面控制站无法识别DO_SET_RESUME_REPEAT_DIST任务项目
- 从希望启用该功能的任务点添加一个 UNKNOWN 任务项目,并将 MAVLink ID 设置为 215;
- 将第一列数据设置为任务恢复时的倒带距离(以米为单位)。
!Note
必须将 MIS_RESTART 参数设置为零,以防止飞行任务重新启动,这项功能才能起作用。
要检查飞行任务中是否正确设置了倒带距离,请监控地面控制站的信息输出。当飞行器注册该命令时,将显示以下信息: "恢复重复距离设置为 <DISTANCE> m"。
在整个任务过程中,可以设置多个 DO_SET_RESUME_REPEAT_DIST 命令。这使操作员能够在整个任务过程中改变倒带距离或开关该功能,因为在某些任务路段操纵飞行器时需要非常小心和准确。
可以通过设置距离为零的 DO_SET_RESUME_REPEAT_DIST 任务项来关闭这一功能。
!Tip
在确定所需的恢复距离时,对大多数飞行器来说,一个合理的值是最小转弯半径的两倍。唯一的例外是可以原地转向的飞行器(多旋翼飞行器和某些无人车),在这种情况下,合理的距离应为 WP_RADIUS 的两倍。
7.6.2 工作原理
一旦启用,ArduPilot 将开始记录成功加载为"活动"的航点。最多可存储七个航点的历史记录。任务恢复后,将搜索任务历史记录,直到以下任一情况:
- 在任务轨道中找到一个满足倒带距离要求的位置;
- 找到已存储任务历史记录的终点,在这种情况下,恢复位置将是历史记录中存储的最后一个航点。
然后,飞行器将恢复到任务轨道上的该位置,并按计划继续执行任务。
!Note
恢复位置会考虑高度因素。如果飞行器沿任务航迹恢复飞行,而飞行器的高度正在发生变化,则恢复位置的高度将在两个相邻航点之间进行线性插值。
!Note
为防止飞行器存储模糊的历史记录并重新回到意外位置,如果使用地面控制站或脚本中的设定航点功能更改任务,则历史记录将被重置。这可以防止飞行器将任务倒带回到历史记录被重置的位置。
!Note
该功能与 DO_JUMP 命令配合使用,在飞行器继续执行任务时,跳跃次数不会递增。
7.6.3 局限性
1) 任务航段短:如果任务中的航点间距很近,而请求的后退距离大于最后通过的六个航点的距离,那么飞行器将在存储的"最旧"航点上继续前进。
2) 曲线航点:该功能可与曲线航点一起使用。不过,由于距离计算是基于导航命令位置之间的直线,因此恢复距离的精确度会降低。
3) 非航点导航命令:该功能适用于非航点导航命令,例如 LOITER_TURNS。但是,距离计算并不考虑这些命令中的飞行器航迹距离。以前面的例子为例,距离计算不考虑徘徊中的飞行距离。
相关文章:
(7)(7.6) 恢复任务回放
文章目录 前言 7.6.1 配置 7.6.2 工作原理 7.6.3 局限性 前言 本页介绍了什么是"任务继续时后退"功能以及如何使用该功能。 !Note 从 4.1 版起,Plane、Copter 和 Rover 均可使用此功能。 在某些应用或运行区域,为了消除冲突&…...

spark yarn 开启动态资源分配
概念 不需要指定并发,只需要指定内存, 程序在运行后会动态调节并发数量,我们只需要设置一个上线即可 在spark 配置文件设置: spark.dynamicAllocation.enabled true spark.shuffle.service.enabled true 准备shuffer jar 将spar…...
Android学习之路(8) Activity
本节引言: 本节开始讲解Android的四大组件之一的Activity(活动),先来看下官方对于Activity的介绍: 移动应用体验与桌面体验的不同之处在于,用户与应用的互动并不总是在同一位置开始,而是经常以不确定的方式开始。例如&…...
Linux的热拔插UDEV机制
文章目录 UDEV简介守护进程基本特点 守护进程和后台进程的区别开发守护进程结束 UDEV简介 udev是一个设备管理工具,udev以守护进程的形式运行,通过侦听内核发出来的uevent来管理/dev目录下的设备文件。 udev在用户空间运行,而不在内核空间 …...
Azure应用程序网关
文章目录 什么是应用程序网关实战演练创建虚拟网络创建虚拟机创建应用程序网关测试搭建结果 什么是应用程序网关 Azure应用程序网关是一种托管服务,用于提供安全、可缩放的 Web 应用程序前端点的应用程序传送控制和保护。它可以通过 SSL 终止、cookie 基于会话持久…...
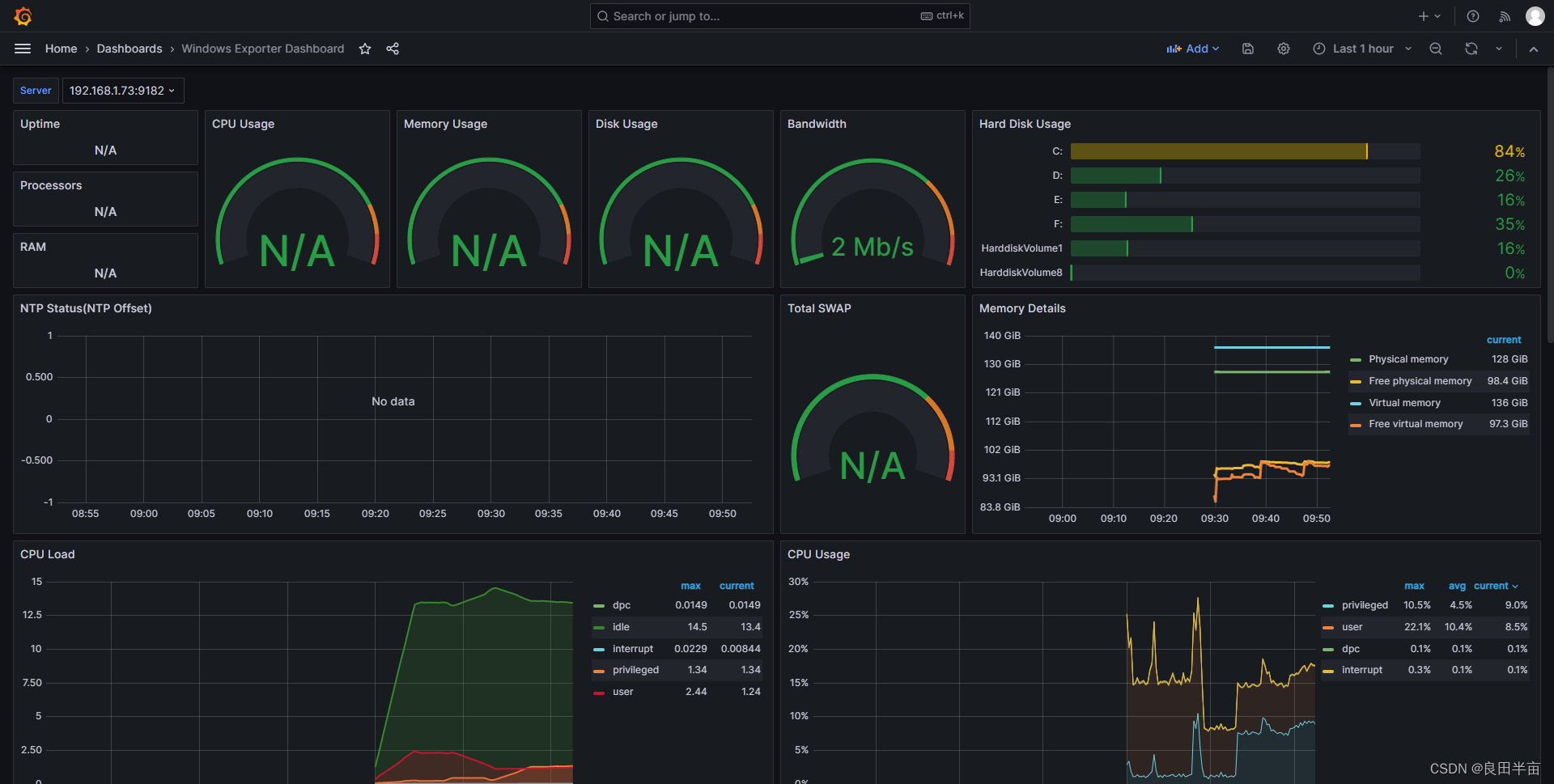
免费开源服务器资源监控系统grafana+prometheus+node_exporter
有项目做测试的时候需要查询服务器资源利用情况,自己又没写相应的模块,此时就需要一套好用的资源监控系统,,咨询了运维人员给推荐了一套,装完后真的很好用。 就是grafanaprometheusnode_exporter(linux&am…...
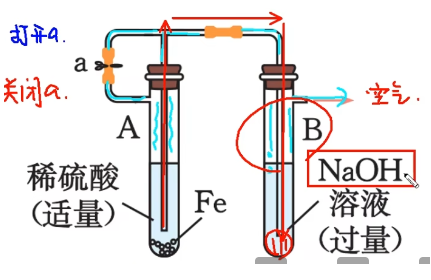
【文化课学习笔记】【化学】金属及其化合物
【化学】必修一:金属及其化合物 钠及其化合物 钠单质 物理性质 颜色:银白色,有金属光泽;密度: ρ H 2 O > ρ N a > ρ 煤油 \mathrm{\rho_{H_2O}>\rho_{Na}>\rho_{煤油}} ρH2O>ρNa>ρ煤…...

Java面试题--设计模式
一、Java 中有几种设计模式? Java 中一般认为有 23 种设计模式 分为三大类: 1. 创建型模式 5 种 ① 工厂方法模式 ② 抽象工厂模式 ③ 单例模式 ④ 建造者模式 ⑤ 原型模式 2. 结构型模式 7 种 ① 适配器模式 ② 装饰器模式 ③ 代理模式 ④ 外观模式 …...

【VS Code插件开发】Webview面板(三)
🐱 个人主页:不叫猫先生,公众号:前端舵手 🙋♂️ 作者简介:前端领域优质作者、阿里云专家博主,共同学习共同进步,一起加油呀! 📢 资料领取:前端…...

WebDriver API及对象识别技术
html页面的iframe的切换 定位到客户管理 新增客户 会无法定位到新增客户,因为在另外一个iframe框架之中。 iframe是html中的框架标签,表示文档中可以嵌入文档,或者说是浮动的框架。在selenium中iframe同样如此,如果驱动器对…...
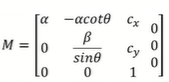
计算机视觉之三维重建(一)(摄像机几何)
针孔摄像机 添加屏障: 使用针孔(o光圈针孔摄像机中心),实现现实与成像一对一映射,减少模糊。其中针孔与像平面的距离为f(焦距);虚拟像平面位于针孔与真实物体之间,与像平面互为倒立关系。位置映射:利用相似…...

机器学习算法-随机森林
目录 机器学习算法-随机森林 (1)构建单棵决策树。 决策树的构建过程 决策树的构建一般包含三个部分:特征选择、树的生成、剪枝。 机器学习算法-随机森林 机器学习算法-随机森林 随机森林是一种监督式学习算法,适用于分类和回…...
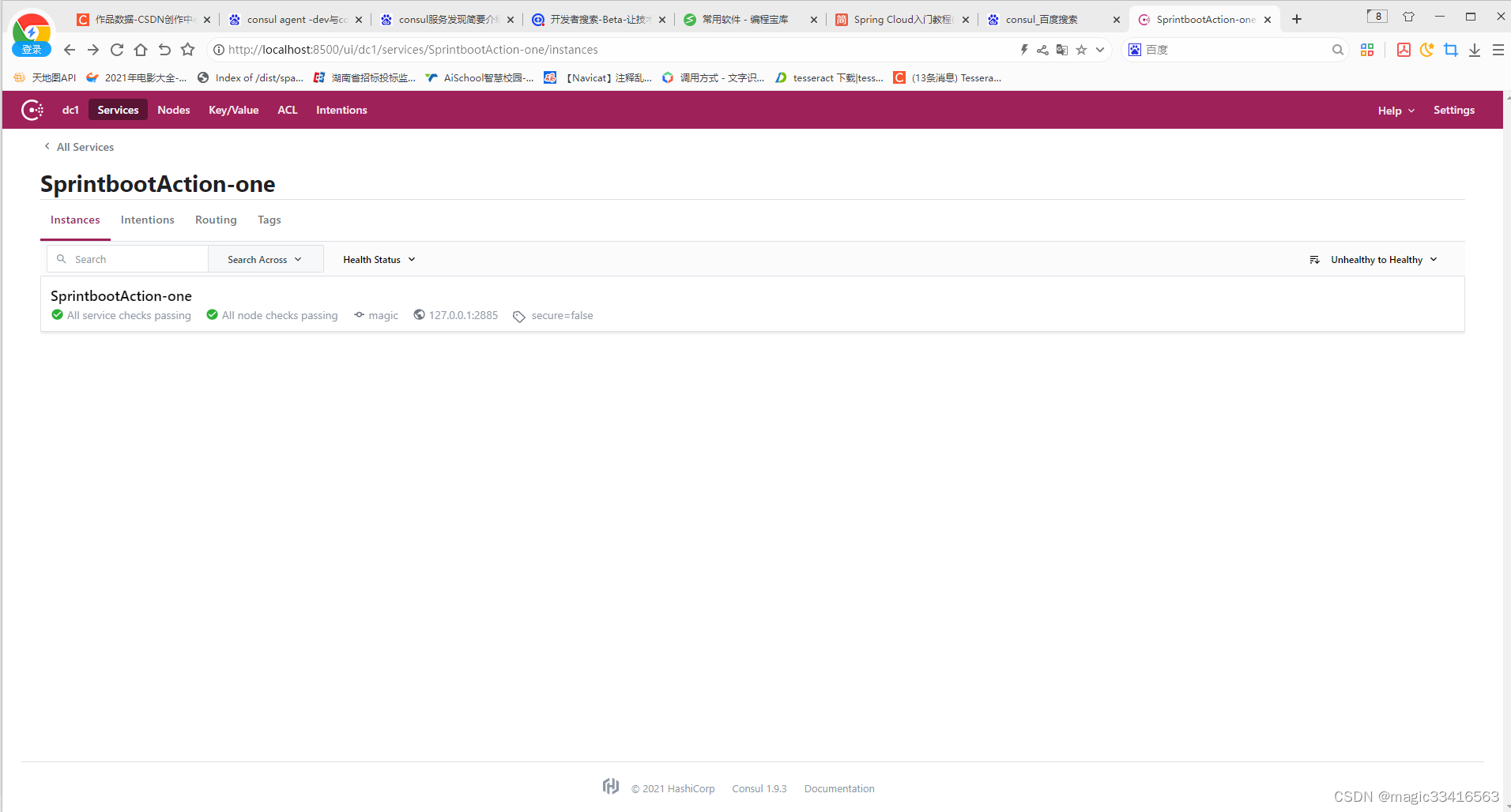
Springboot 实践(10)spring cloud 与consul配置运用之服务的注册与发现
前文讲解,完成了springboot、spring security、Oauth2.0的继承,实现了对系统资源的安全授权、允许获得授权的用户访问,也就是实现了单一系统的全部技术开发内容。 Springboot是微服务框架,单一系统只能完成指定系统的功能…...

解决方案:如何在 Amazon EMR Serverless 上执行纯 SQL 文件?
《大数据平台架构与原型实现:数据中台建设实战》一书由博主历时三年精心创作,现已通过知名IT图书品牌电子工业出版社博文视点出版发行,点击《重磅推荐:建大数据平台太难了!给我发个工程原型吧!》了解图书详…...
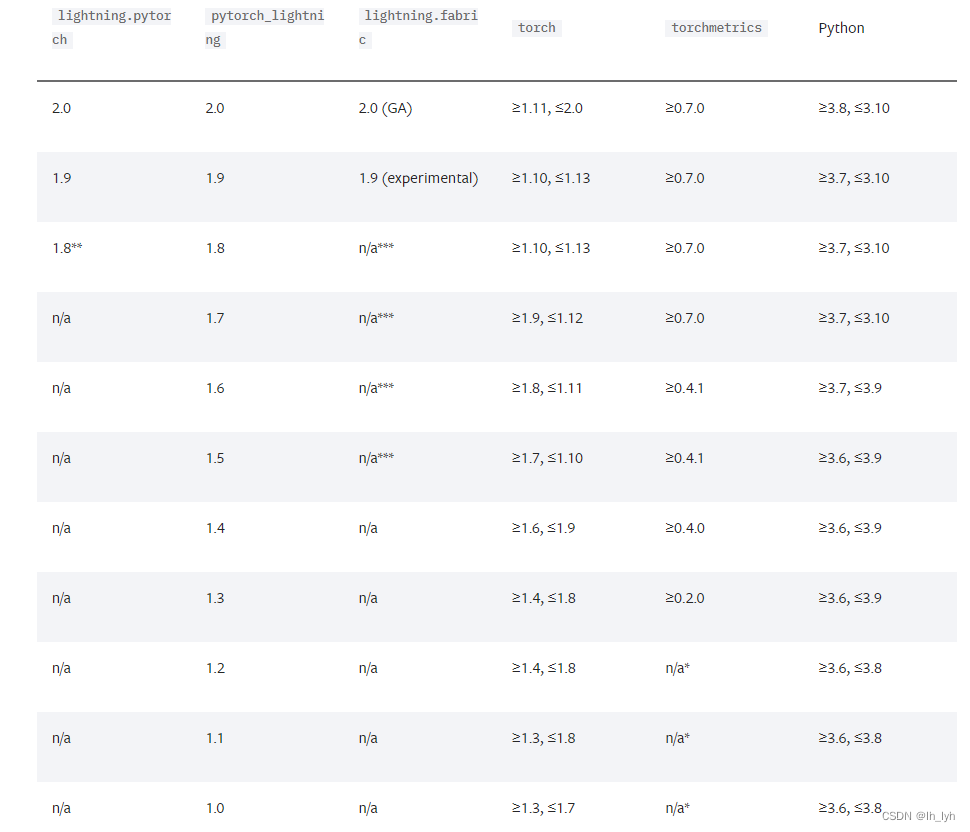
pytorch lightning和pytorch版本对应
参见官方文档: https://lightning.ai/docs/pytorch/latest/versioning.html#compatibility-matrix 下图左一列(lightning.pytorch)安装命令:pip install lightning --use-feature2020-resolver 下图左一列(pytorch_lig…...

Postman返回了一个html页面
问题记录 调用公司的测试环境接口,从浏览器控制台接口处cCopy as cURL(cmd),获取完整的请求内容,然后导入postman发起请求 提测时发现返回一个html页面,明显是被请求在网管处被拦截了,网关返回的这个报错html页面 …...

centos服务器搭建宝塔面板
因为电脑无线网无法登录宝塔,也无法ssh到服务器,但是热点可以连接,网上没找到解决方法,重装下。 解决办法,先追路由,结果是被防火墙拦截了,解封以后还不行,重新查,联动的…...

【微信小程序】记一次自定义微信小程序组件的思路
最近来个需求,要求给小程序的 modal 增加个关闭按钮,上网一查发现原来 2018 年就有人给出解决方案了,于是总结下微信小程序自定义组件的思路:一句话,用 wxml css实现和原生组件类似的样式和效果,之后用 JS…...

TiDB数据库从入门到精通系列之四:SQL 基本操作
TiDB数据库从入门到精通系列之四:SQL 基本操作 一、SQL 语言分类二、查看、创建和删除数据库三、创建、查看和删除表四、创建、查看和删除索引五、记录的增删改六、查询数据七、创建、授权和删除用户 成功部署 TiDB 集群之后,便可以在 TiDB 中执行 SQL 语…...
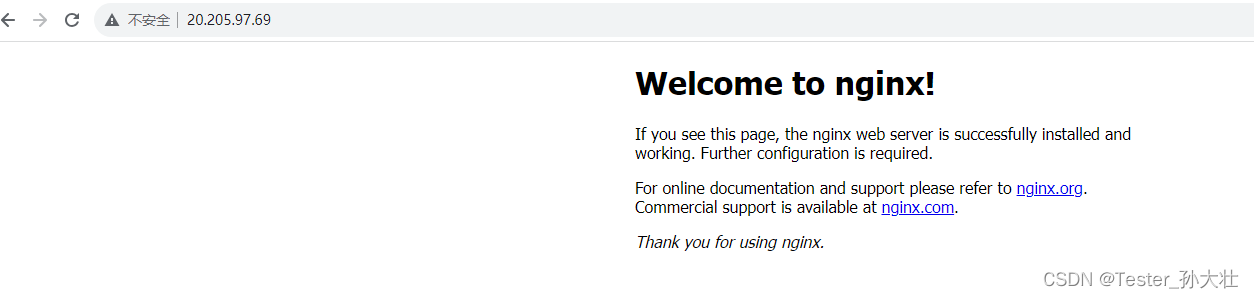
Azure创建自定义VM镜像
创建一个虚拟机,参考 https://blog.csdn.net/m0_48468018/article/details/132267096,入站端口开启80,22 进行远程远程连接 使用CLI命令部署NGINX,输入如下命令 sudo su apt-get update -y apt-get install nginx git -y最后的效果 4. 关闭…...

网络编程(Modbus进阶)
思维导图 Modbus RTU(先学一点理论) 概念 Modbus RTU 是工业自动化领域 最广泛应用的串行通信协议,由 Modicon 公司(现施耐德电气)于 1979 年推出。它以 高效率、强健性、易实现的特点成为工业控制系统的通信标准。 包…...
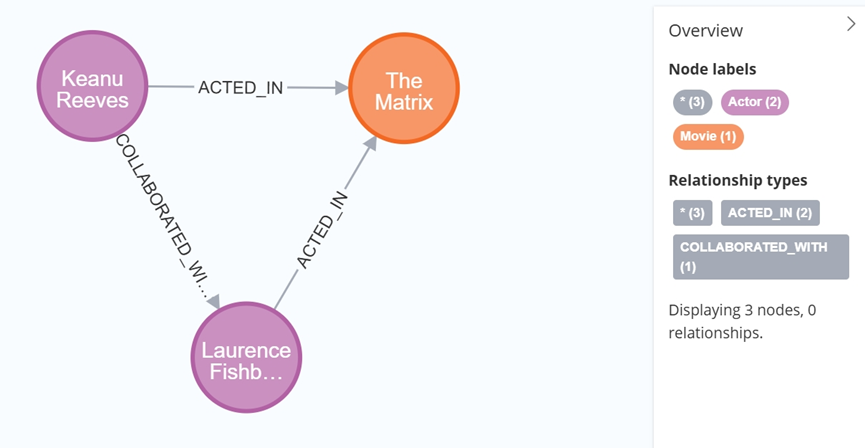
大数据学习栈记——Neo4j的安装与使用
本文介绍图数据库Neofj的安装与使用,操作系统:Ubuntu24.04,Neofj版本:2025.04.0。 Apt安装 Neofj可以进行官网安装:Neo4j Deployment Center - Graph Database & Analytics 我这里安装是添加软件源的方法 最新版…...
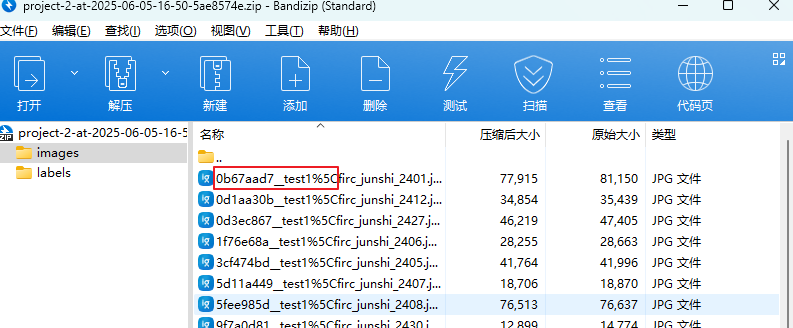
label-studio的使用教程(导入本地路径)
文章目录 1. 准备环境2. 脚本启动2.1 Windows2.2 Linux 3. 安装label-studio机器学习后端3.1 pip安装(推荐)3.2 GitHub仓库安装 4. 后端配置4.1 yolo环境4.2 引入后端模型4.3 修改脚本4.4 启动后端 5. 标注工程5.1 创建工程5.2 配置图片路径5.3 配置工程类型标签5.4 配置模型5.…...
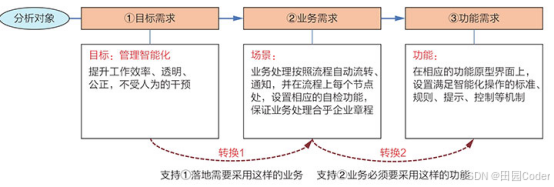
大话软工笔记—需求分析概述
需求分析,就是要对需求调研收集到的资料信息逐个地进行拆分、研究,从大量的不确定“需求”中确定出哪些需求最终要转换为确定的“功能需求”。 需求分析的作用非常重要,后续设计的依据主要来自于需求分析的成果,包括: 项目的目的…...
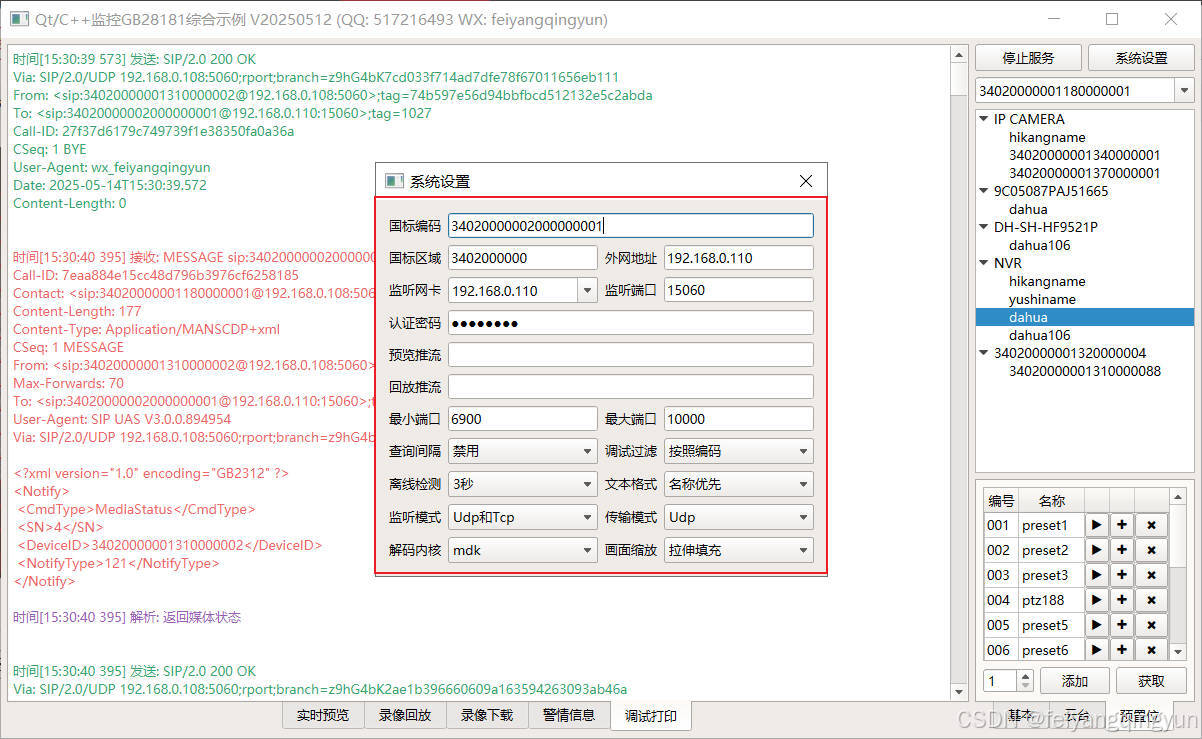
Qt/C++开发监控GB28181系统/取流协议/同时支持udp/tcp被动/tcp主动
一、前言说明 在2011版本的gb28181协议中,拉取视频流只要求udp方式,从2016开始要求新增支持tcp被动和tcp主动两种方式,udp理论上会丢包的,所以实际使用过程可能会出现画面花屏的情况,而tcp肯定不丢包,起码…...

Linux简单的操作
ls ls 查看当前目录 ll 查看详细内容 ls -a 查看所有的内容 ls --help 查看方法文档 pwd pwd 查看当前路径 cd cd 转路径 cd .. 转上一级路径 cd 名 转换路径 …...

AI编程--插件对比分析:CodeRider、GitHub Copilot及其他
AI编程插件对比分析:CodeRider、GitHub Copilot及其他 随着人工智能技术的快速发展,AI编程插件已成为提升开发者生产力的重要工具。CodeRider和GitHub Copilot作为市场上的领先者,分别以其独特的特性和生态系统吸引了大量开发者。本文将从功…...

CRMEB 框架中 PHP 上传扩展开发:涵盖本地上传及阿里云 OSS、腾讯云 COS、七牛云
目前已有本地上传、阿里云OSS上传、腾讯云COS上传、七牛云上传扩展 扩展入口文件 文件目录 crmeb\services\upload\Upload.php namespace crmeb\services\upload;use crmeb\basic\BaseManager; use think\facade\Config;/*** Class Upload* package crmeb\services\upload* …...
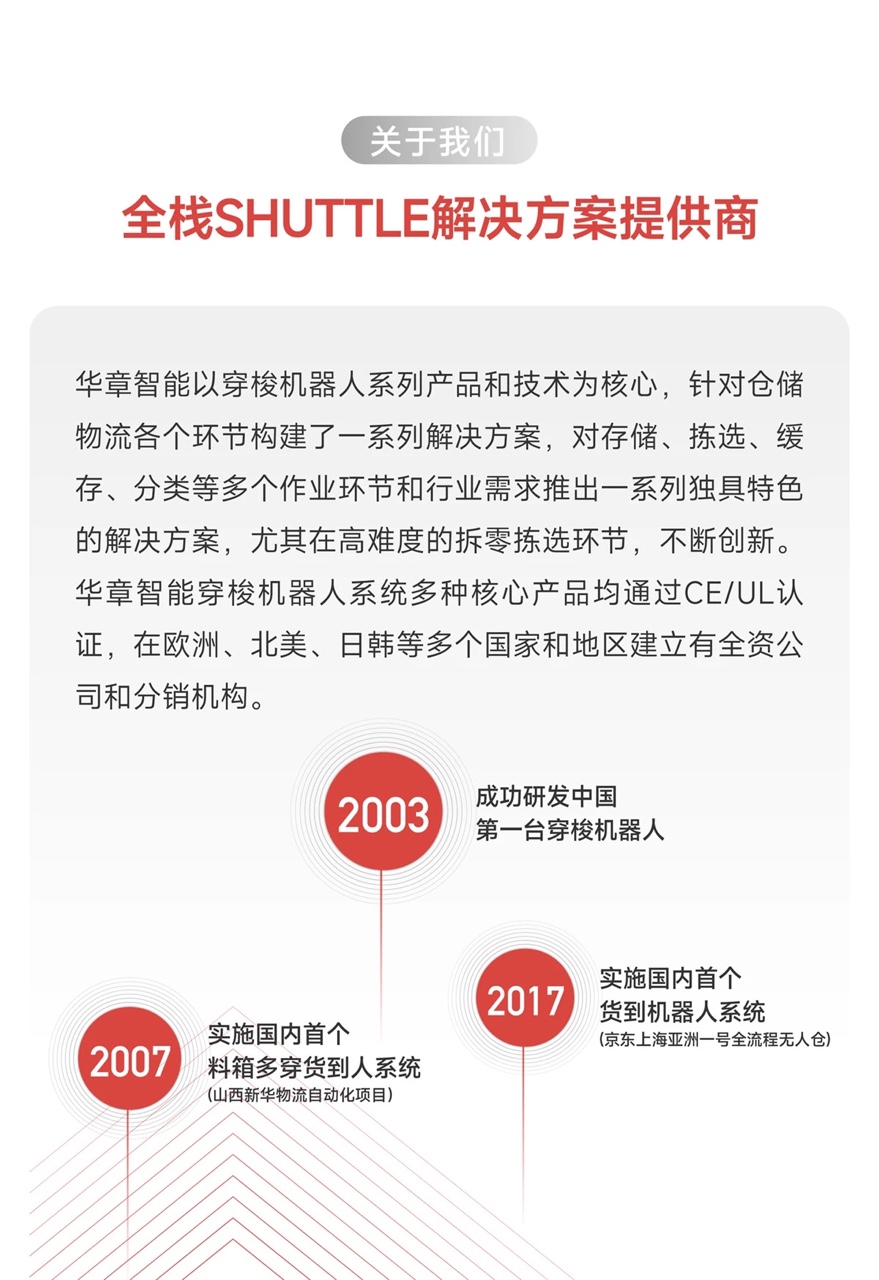
智能仓储的未来:自动化、AI与数据分析如何重塑物流中心
当仓库学会“思考”,物流的终极形态正在诞生 想象这样的场景: 凌晨3点,某物流中心灯火通明却空无一人。AGV机器人集群根据实时订单动态规划路径;AI视觉系统在0.1秒内扫描包裹信息;数字孪生平台正模拟次日峰值流量压力…...

【C++从零实现Json-Rpc框架】第六弹 —— 服务端模块划分
一、项目背景回顾 前五弹完成了Json-Rpc协议解析、请求处理、客户端调用等基础模块搭建。 本弹重点聚焦于服务端的模块划分与架构设计,提升代码结构的可维护性与扩展性。 二、服务端模块设计目标 高内聚低耦合:各模块职责清晰,便于独立开发…...