Ubuntu搭建CT_ICP里程计的环境暨CT-ICP部署
CT-ICP部署以及运行复现过程
- 0.下载资源,并按照github原网址的过程进行。
- 1.查看所需要的各个部分的版本。
- 2.安装clang编译器
- 3.进行超级构建
- 3.1标准进行
- 3.2构建过程中遇到的问题
- 4.构建并安装CT-ICP库
- 4.1标准进行
- 4.2遇到的问题及解决办法
- 5.构建 CT-ICP 的 ROS 包装
- 5.1标准进行
- 运行篇
- 1、使用脚本(在ct-icp数据集上)
- 2.使用可控系统(ROS)
0.下载资源,并按照github原网址的过程进行。
源码网址:https://github.com/jedeschaud/ct_icp
所有的步骤按照readme.md中的步骤进行,在此基础上添加里自己在此过程遇到的问题及解决办法。
1.查看所需要的各个部分的版本。
版本要求:
GCC >= 7.5, clang >= 8.01,cmake >= 3.14
查看gcc版本,gcc -v查看
(base) xiaoduan@fighter:~/source1/CT-ICP/pyLiDAR-SLAM$ gcc --version
gcc (Ubuntu 9.4.0-1ubuntu1~20.04.1) 9.4.0
Copyright (C) 2019 Free Software Foundation, Inc.
This is free software; see the source for copying conditions. There is NO
warranty; not even for MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE.
cmake --vesion查看cmake版本
(base) xiaoduan@fighter:~/source1/CT-ICP/pyLiDAR-SLAM$ cmake --version
cmake version 3.16.1CMake suite maintained and supported by Kitware (kitware.com/cmake).
2.安装clang编译器
安装clang参考下面网址安装:https://blog.csdn.net/xujianjun229/article/details/128902018#commentBox
的前面部分进行的。
依次输入一下三条命令:
sudo apt-get install llvm
sudo apt-get install clang
clang -v
产看版本的结果为:
clang version 10.0.0-4ubuntu1
Target: x86_64-pc-linux-gnu
Thread model: posix
InstalledDir: /usr/bin
Found candidate GCC installation: /usr/bin/../lib/gcc/x86_64-linux-gnu/7
Found candidate GCC installation: /usr/bin/../lib/gcc/x86_64-linux-gnu/7.5.0
Found candidate GCC installation: /usr/bin/../lib/gcc/x86_64-linux-gnu/8
Found candidate GCC installation: /usr/bin/../lib/gcc/x86_64-linux-gnu/9
Found candidate GCC installation: /usr/lib/gcc/x86_64-linux-gnu/7
Found candidate GCC installation: /usr/lib/gcc/x86_64-linux-gnu/7.5.0
Found candidate GCC installation: /usr/lib/gcc/x86_64-linux-gnu/8
Found candidate GCC installation: /usr/lib/gcc/x86_64-linux-gnu/9
Selected GCC installation: /usr/bin/../lib/gcc/x86_64-linux-gnu/9
Candidate multilib: .;@m64
Selected multilib: .;@m64
Found CUDA installation: /usr/lib/cuda, version 10.1
至此,所有的基本要求已经符合。
3.进行超级构建
3.1标准进行
依次执行以下命令来安装所有依赖:
mkdir .cmake-build-superbuild && cd .cmake-build-superbuild #< Creates the cmake folder
cmake ../superbuild #< (1) Configure step
cmake --build . --config Release #< Build step (Downloads and install the dependencies), add -DWITH_VIZ3D=ON to install with the GUI
cmake . -DWITH_VIZ3D=ON #构建可视化
所有的命令执行完毕之后,如果一切正常,则应创建一个目录install,其中还会出现一个superbuild_import.cmake文件。
(此步骤进行之前,建议下载viz3d并执行pip install . 进行安装,这样可以避免后面会出现的一些问题)
3.2构建过程中遇到的问题
- 在第三句命令运行时出现问题了应该和连接外网有关,尝试了一下午决定忽略。
主要一直卡在:
git clone https://ceres-solver.googlesource.com/ceres-solveratal: unable to access ‘https://ceres-solver.googlesource.com/ceres-solver/’: Failed to connect to ceres-solver.googlesource.com port 443: 连接超
- 第二天早上来到之后还是决定试一试,因为在这儿忽略之后可能会出现其他一系列的问题。
调整网一直没能成功,于是就开始找文件中的clone语句,最终找到路径如下所示
在文件夹 .cmake-build-superbuild/MappingResearchKEU_superbuild/src/MappingResearchKEU_superbuild下gedit 打开CMakeLists.txt文件,进行以下改动
//更改前:
# INSTALL Ceres
if (WITH_CERES)message(INFO "${LOG_PREFIX}Generating Ceres dependency")ExternalProject_Add(CeresPREFIX CeresGIT_REPOSITORY https://ceres-solver.googlesource.com/ceres-solver //!!!!需要改动的地方 GIT_TAG 2.0.0//更改后:
# INSTALL Ceres
if (WITH_CERES)message(INFO "${LOG_PREFIX}Generating Ceres dependency")ExternalProject_Add(CeresPREFIX CeresGIT_REPOSITORY https://github.com/ceres-solver/ceres-solverGIT_TAG 2.0.0
然后就成功了,还好没放弃。
4.构建并安装CT-ICP库
4.1标准进行
执行以下命令:
# Inside the main directory
mkdir cmake-build-release && cd cmake-build-release #< Create the build directory
cmake .. -DCMAKE_BUILD_TYPE=Release #< (2) Configure with the desired options (specify arguments with -D<arg_name>=<arg_value>), add -DWITH_VIZ3D=ON to install with the GUI
cmake --build . --target install --config Release --parallel 12 #< Build and Install the project
cmake . -DWITH_VIZ3D=ON #构建可视化
注意: 第一行命令应该在此项目的主文件下进行。
如果一切正常,则超级构建目录中应该会出现一个子目录<SUPERBUILD_INSTALL_DIR>/CT_ICP/lib/cmake。 可以使用位于的配置文件在 cmake 中加载库项目,或使用 ROS 或指定的可执行文件。CT_ICP
4.2遇到的问题及解决办法
- 第二行命令运行时又出现错误:
CMake Error at cmake/external.cmake:13 (get_target_property):INTERFACE_LIBRARY targets may only have whitelisted properties. Theproperty "IMPORTED_RELEASE_LOCATION" is not allowed.
Call Stack (most recent call first):CMakeLists.txt:51 (include)INFO /home/xiaoduan/project/lidar/ct_icp-master/install/Ceres/lib/libceres.so.2.0.0
INFO /home/xiaoduan/project/lidar/ct_icp-master/install/glog/lib/libglog.so.0.5.0
CMake Error at cmake/external.cmake:13 (get_target_property):INTERFACE_LIBRARY targets may only have whitelisted properties. Theproperty "IMPORTED_RELEASE_LOCATION" is not allowed.
Call Stack (most recent call first):CMakeLists.txt:51 (include)INFO /home/xiaoduan/project/lidar/ct_icp-master/install/yaml-cpp/lib/libyaml-cpp.so.0.6.3
CMake Error at cmake/external.cmake:13 (get_target_property):INTERFACE_LIBRARY targets may only have whitelisted properties. Theproperty "IMPORTED_RELEASE_LOCATION" is not allowed.
Call Stack (most recent call first):CMakeLists.txt:51 (include)INFO /home/xiaoduan/project/lidar/ct_icp-master/install/tinyply/lib/libtinyply.so
INFO -- [CT-ICP] -- Appending to the INSTALL RPATH the RPATH to the external libraries: [:/home/xiaoduan/project/lidar/ct_icp-master/install/Ceres/lib:/home/xiaoduan/project/lidar/ct_icp-master/install/glog/lib:/home/xiaoduan/project/lidar/ct_icp-master/install/yaml-cpp/lib:/home/xiaoduan/project/lidar/ct_icp-master/install/tinyply/lib]
INFO [CT_ICP] -- "WITH_GTSAM=OFF gtsam dependent targets will not be built"
-- Configuring incomplete, errors occurred!
See also "/home/xiaoduan/project/lidar/ct_icp-master/cmake-build-release/CMakeFiles/CMakeOutput.log".
See also "/home/xiaoduan/project/lidar/ct_icp-master/cmake-build-release/CMakeFiles/CMakeError.log".在网上搜了好多种方法都不好用,也没看明白,然后又在camke官网上搜索,甚至没有搜到IMPORTED_RELEASE_LOCATION。
试了好多种方式,发现每次搜索出来的都是IMPORTED_LOCATION_RELEASE,于是将cmake/external.cmake:13文件中的内容进行了修改。但是,事实证明,并没有效果。
接着按照以下网址对cmake进行了升级
https://blog.csdn.net/weixin_45860565/article/details/127869813
然后问题就解决了。最后一行命令直接成功,比较顺利。
现在cmake的版本为3.22.1
- 执行了cmake … --DWITH_VIZ3D=ON,然后就出现了以下问题。
CMake Error at install/superbuild_import.cmake:35 (find_package):Could not find a package configuration file provided by "viz3d" with any ofthe following names:viz3dConfig.cmakeviz3d-config.cmakeAdd the installation prefix of "viz3d" to CMAKE_PREFIX_PATH or set"viz3d_DIR" to a directory containing one of the above files. If "viz3d"provides a separate development package or SDK, be sure it has beeninstalled.
Call Stack (most recent call first):install/superbuild_import.cmake:101 (SLAM_DEFAULT_FIND_PACKAGE)cmake/superbuild_utils.cmake:27 (include)CMakeLists.txt:49 (SLAM_INCLUDE_SUPERBUILD)调试没调试好,所幸删除cmake-build-release并重新执行了一遍D步骤。
然后进入到文件夹ct_icp-master/.cmake-build-superbuild/MappingResearchKEU_superbuild/src/MappingResearchKEU_superbuild-build/viz3d/src/viz3d中,执行命令./install.sh进行了安装
然后再从第三步执行一遍。
- 在执行第二句时,出现错误:
CMake Error at /opt/ros/noetic/share/catkin/cmake/empy.cmake:30 (message):Unable to find either executable 'empy' or Python module 'em'... tryinstalling the package 'python3-empy'
Call Stack (most recent call first):/opt/ros/noetic/share/catkin/cmake/all.cmake:164 (include)/opt/ros/noetic/share/catkin/cmake/catkinConfig.cmake:20 (include)CMakeLists.txt:64 (find_package)按照下面两个网站的内容进行解决
https://blog.csdn.net/gongdiwudu/article/details/124430036
https://blog.csdn.net/zkk9527/article/details/125558478
5.构建 CT-ICP 的 ROS 包装
5.1标准进行
- 安装共享库,执行以下命令:
cd ros/roscore
mkdir cmake-build-release && cd cmake-build-release #< Create the build directory
cmake .. -DCMAKE_BUILD_TYPE=Release #< (2) Configure with the desired options (specify arguments with -D<arg_name>=<arg_value>)
cmake --build . --target install --config Release --parallel 12 #< Build and Install the ROSCore library
- 新建一个工作空间,catkin_ws。并在里面建立一个src文件,执行以下命令:
mkdir -p catkin_ws/src
- 将项目与自己的空间连接到一起
cd <path-to-your-catkin-workspace>/src #< Move to the Catkin Workspace's src directory
ln -s <path-to-ct_icp-git-project>/ros/catkin_ws/ct_icp_odometry ct_icp_odometry #< Make a symbolic link to the `catkin_ws` folder
ln -s <path-to-ct_icp-git-project>/ros/catkin_ws/slam_roscore slam_roscore #< Make a symbolic link to the `catkin_ws` folder
cd .. #< Move back to the root of the catkin workspace
catkin_make -DSUPERBUILD_INSTALL_DIR=<path-to-superbuild-install-dir>
如果安装成功,并且在获取工作区的 devel 目录后,您应该能够启动 已安装的 ROS 节点。
包装定义以下节点:
ct_icp_dataset_node:发布从磁盘读取ct_icp不同数据集的点云的节点。
ct_icp_odometry_node:运行ct_icp测程的主测程节点。
注意: 这里的的工作空间和项目没有包含和被包含的关系。
运行测试:
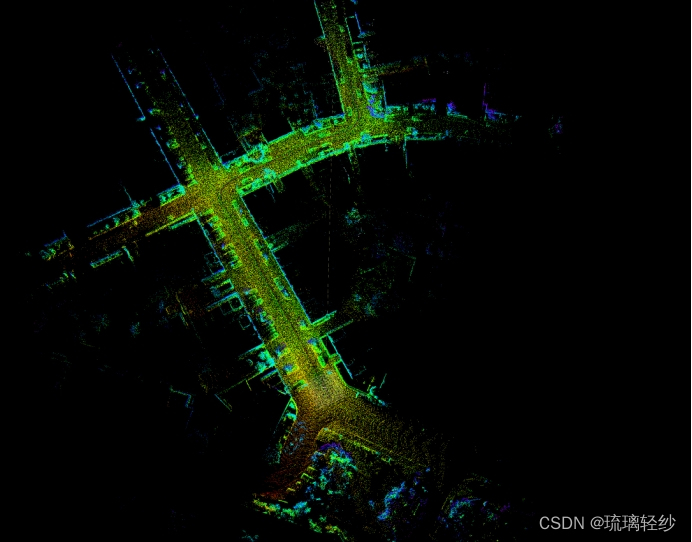
roslaunch ct_icp_odometry launch_slam_dataset.launch dataset_path:=/home/xiaoduan/Desktop/dataset/KITTI/KITTI_raw dataset:=KITTI_raw sequence:=00
测试结果:
测试过程中的一个截图,最终留下的是一个轨迹图。

运行篇
1、使用脚本(在ct-icp数据集上)
此时感觉不用ros也能跑出来,于是就直接使用脚本跑,可以运行成功。
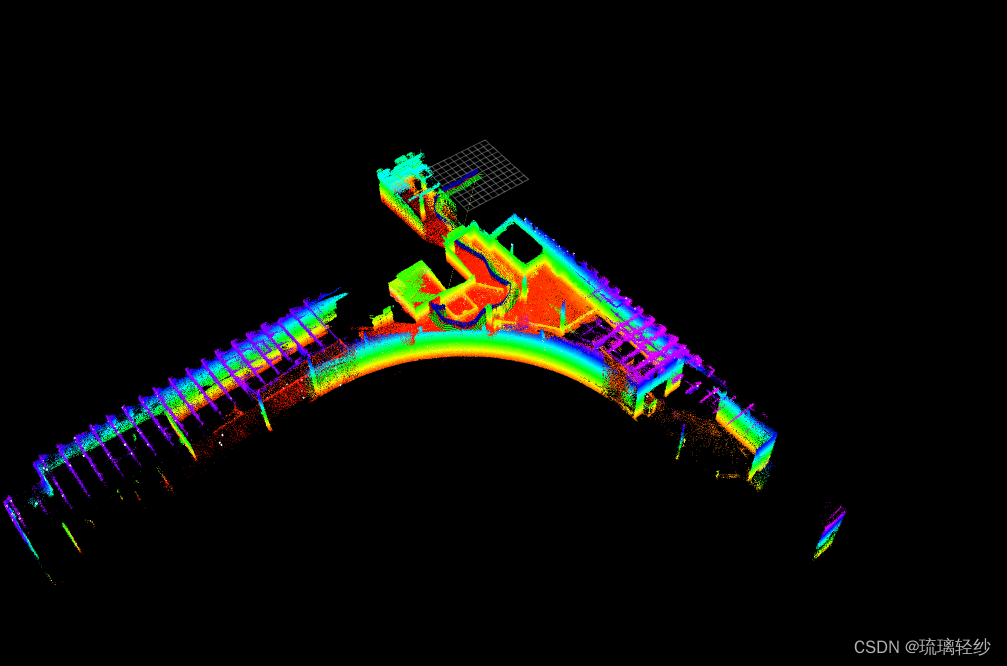
执行命令:
./run_odometry -c /home/xiaoduan/project/lidar/ct_icp-master/config/odometry/driving_config.yaml
脚本测试结果:
2.使用可控系统(ROS)
完成 ROS 安装后,使用 Rosbag推出测程计,例如:ros/catkin_ws/ct_icp_odometry/launch
roslaunch ct_icp_odometry lidar_odometry_subt.launch rosbag:=/home/xiaoduan/Desktop/dataset/a_lvl_1.bag
运行结果:



写在最后:
整个大体的步骤大体就有以下几个过程。
下载viz3d并执行pip install . 进行安装
git
cd
执行超级构建
对cmake进行手动升级
执行构建slam库
执行构建ros库
独立建立工作空间,与git的地址不同
进行节点创立
完成
然后进行运行
相关文章:
Ubuntu搭建CT_ICP里程计的环境暨CT-ICP部署
CT-ICP部署以及运行复现过程 0.下载资源,并按照github原网址的过程进行。1.查看所需要的各个部分的版本。2.安装clang编译器3.进行超级构建3.1标准进行3.2构建过程中遇到的问题 4.构建并安装CT-ICP库4.1标准进行4.2遇到的问题及解决办法 5.构建 CT-ICP 的 ROS 包装5…...

微信小程序全局事件订阅eventBus
微信小程序全局事件订阅 在Vue开发中,我们可能用过eventBus来解决全局范围内的事件订阅及触发逻辑,在微信小程序的开发中我们可能也也会遇到同样的需求,那么我们尝试下在小程序(原生小程序开发)中实现类似eventBus的事…...

华为云cce发布若依前后分离版:2.nginx镜像操作
下载nginx docker的官方镜像。 docker资源很难找,我在我的空间上传了一个,需要的话可以下载: https://download.csdn.net/download/axe6404/88225311 下载后,请用以下方法安装 2.1 导入docker 官方nginx镜像。 将镜像包nginx docker镜像包nginx-dockerimage.tar放…...
TCP协议报文结构
TCP是什么 TCP(传输控制协议)是一种面向连接的、可靠的、全双工的传输协议。它使用头部(Header)和数据(Data)来组织数据包,确保数据的可靠传输和按序传递。 TCP协议报文结构 下面详细阐述TCP…...

Day14-2-NodeJS后端开发流程
Day14-NodeJS后端工程化流程 一 apifox工具 apifox是目前最好的接口调试工具 1 环境搭建 安装登录创建项目接口里面创建对应文件夹在指定的文件夹里面创建接口2 GET请求 1 apifox发送GET请求 2 后端接收GET请求 router.get("/getUserinfo"...
计算机竞赛 基于CNN实现谣言检测 - python 深度学习 机器学习
文章目录 1 前言1.1 背景 2 数据集3 实现过程4 CNN网络实现5 模型训练部分6 模型评估7 预测结果8 最后 1 前言 🔥 优质竞赛项目系列,今天要分享的是 基于CNN实现谣言检测 该项目较为新颖,适合作为竞赛课题方向,学长非常推荐&am…...
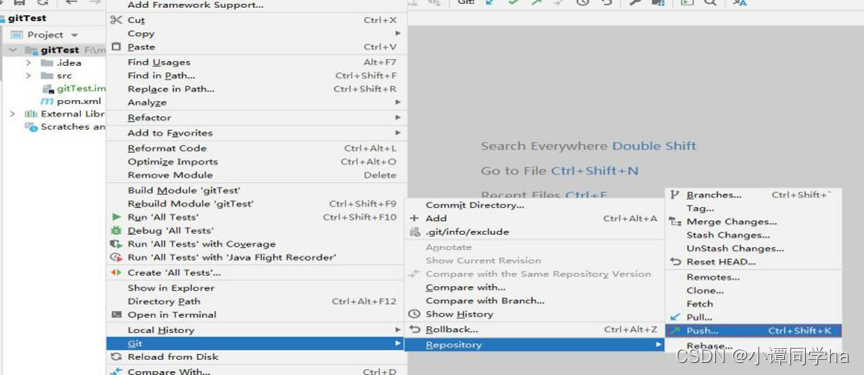
框架(Git基础详解及Git在idea中集成步骤)
目录 基础: idea集成Git并添加项目到git仓库 1.idea集成git,集成.git.exe文件 2.初始化本地Git仓库项目 3. 将工作区代码添加到暂存区 4.将暂存区代码添加到本地仓库 5.Git本地库操作 Idea集成Gitee并提交代码到第三方库 1.setting里搜索gitee 2.添…...
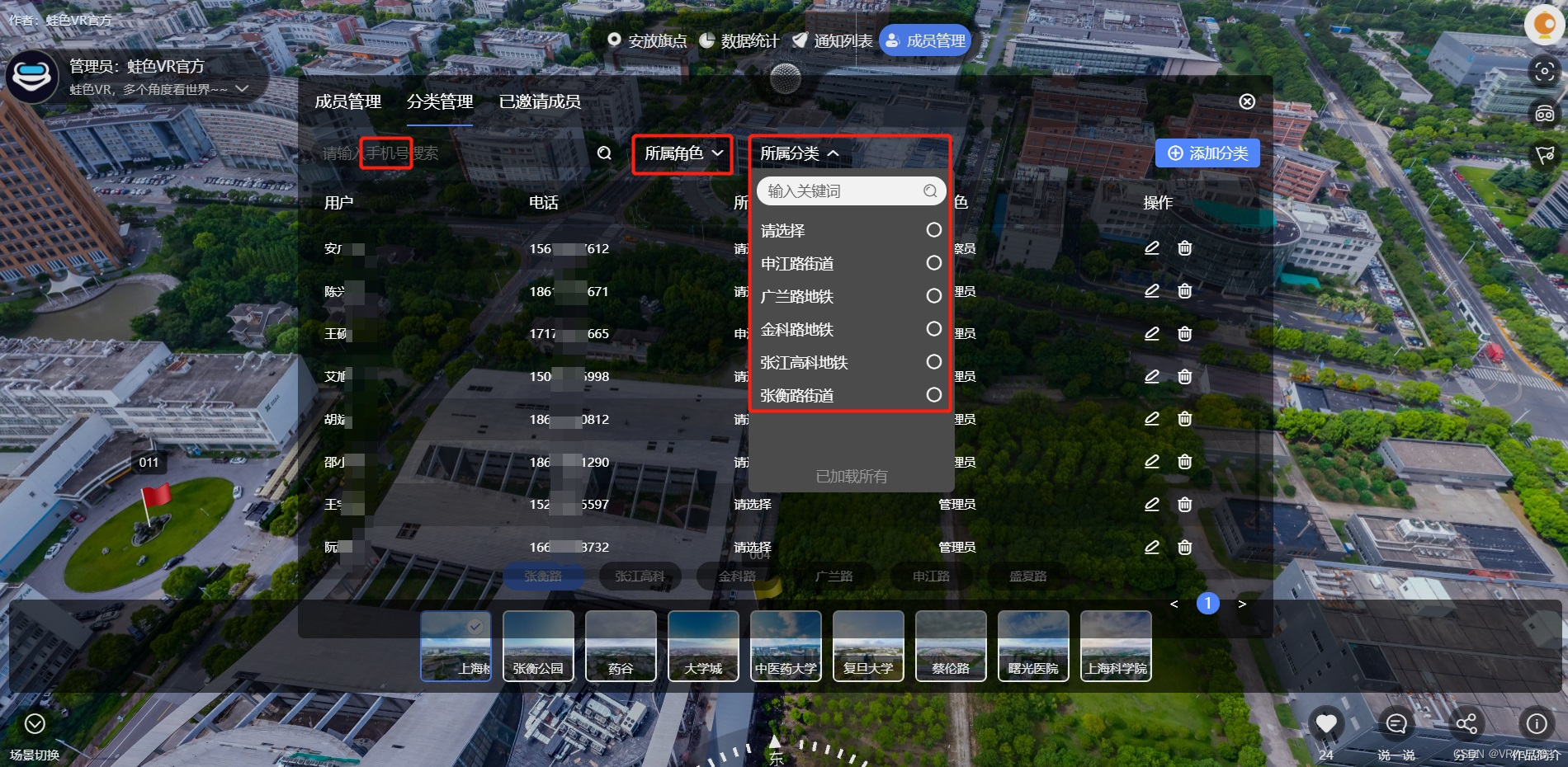
0基础学习VR全景平台篇 第88篇:智慧眼-成员管理
一、功能说明 成员管理,是指管理智慧眼项目的成员,拥有相关权限的人可以进行添加成员、分配成员角色、设置成员分类、修改成员以及删除成员五项操作。但是仅限于管理自己的下级成员,上级成员无权管理。 二、前台操作页面 登录智慧眼后台操…...
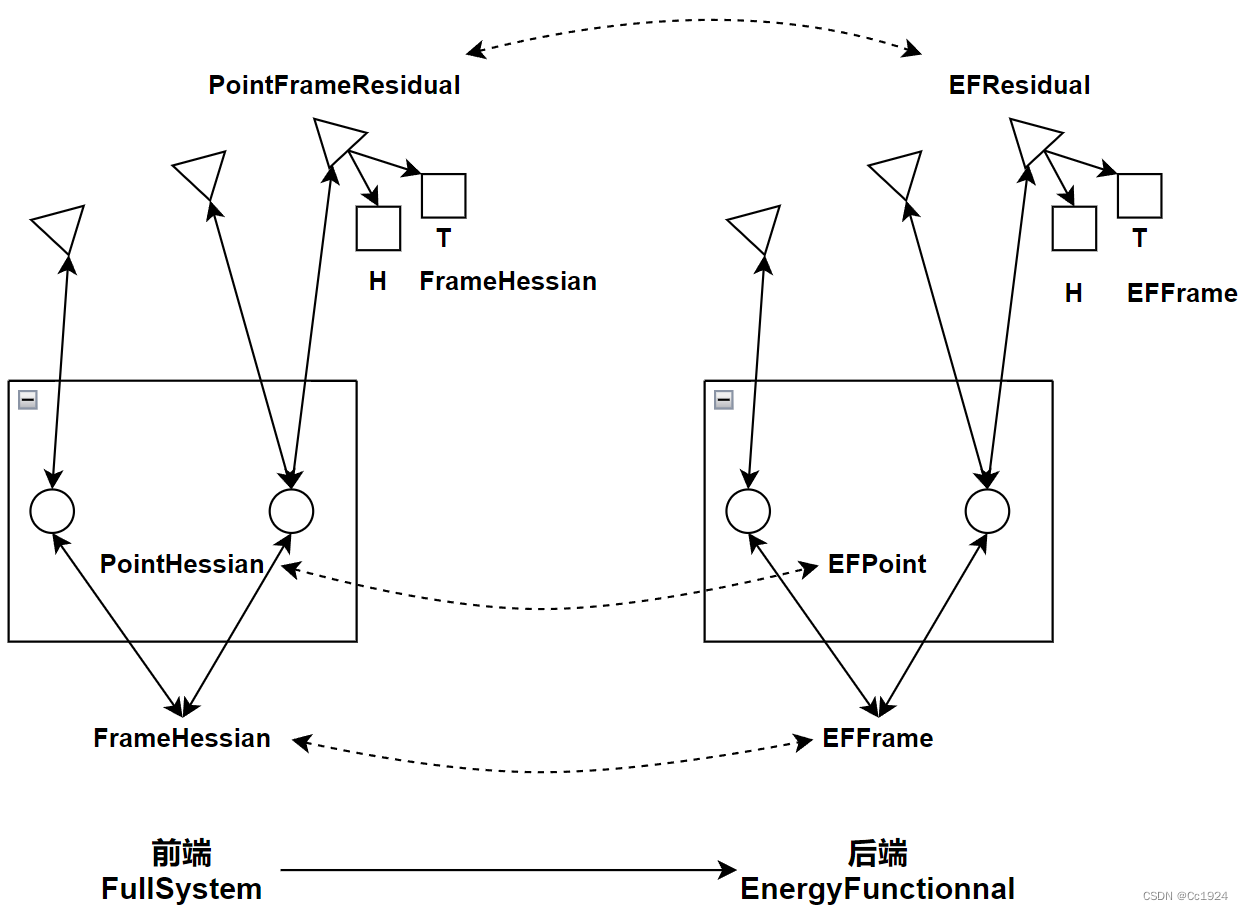
DSO 系列文章(2)——DSO点帧管理策略
文章目录 1.点所构成的残差Residual的管理1.1.前端残差的状态1.2.后端点的残差的状态1.3.点的某个残差的删除 2.点Point的管理2.1.如何删除点——点Point的删除2.2.边缘化时删除哪些点? 3.帧FrameHessian的管理 DSO代码注释:https://github.com/Cc19245/…...
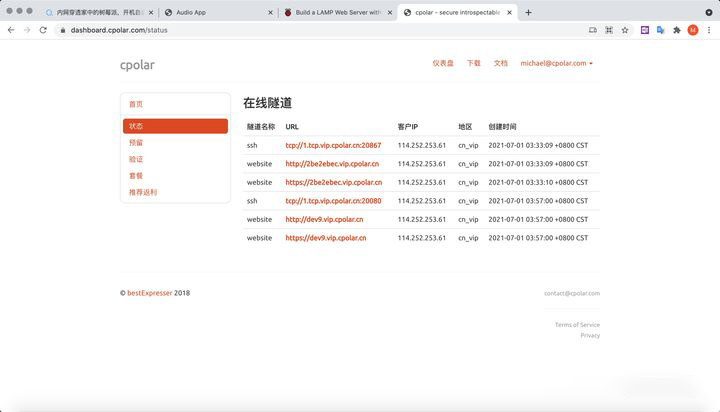
无需公网IP——搭建web站点
文章目录 概述使用 Raspberry Pi Imager 安装 Raspberry Pi OS设置 Apache Web 服务器测试 web 站点安装静态样例站点将web站点发布到公网安装 Cpolar内网穿透cpolar进行token认证生成cpolar随机域名网址生成cpolar二级子域名将参数保存到cpolar配置文件中测试修改后配置文件配…...

swift 项目集成友盟推送
1, 需要用桥接文件 , 不然引用不到依赖库 2, 可以用测试模式测试, 可以debug 3, 测试模式获取deviceToken, 添加测试设备 deviceToken获取方法 func application(_ application: UIApplication, didRegisterForRemoteNotificationsWithDeviceToken deviceToken: Data) { le…...
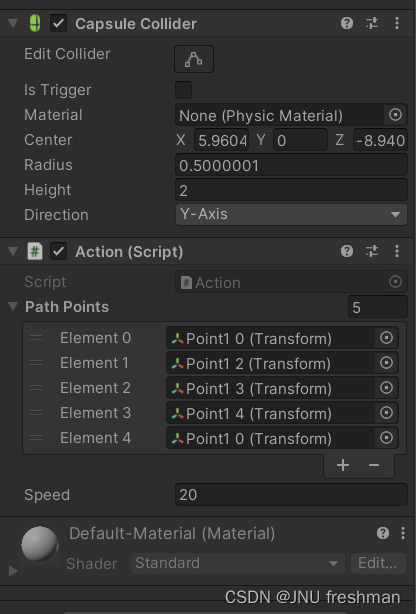
Unity之用Transform 数组加多个空物体-->简单地控制物体按照指定路线自动行驶
文章目录 **原理解释**:**带注释的代码**:实际运用 当你需要实现物体按照指定路线行驶时,你可以通过以下步骤来实现: 原理解释: 路径点:你需要定义一系列路径点,这些点将构成物体行驶的路线。每…...

交换机生成树STP
生成树协议(spanning-tree-protocol,stp):在具有物理环路的交换机网络上生成没有回路的逻辑网络的方法,生成树协议使用生成树算法,在一个具有冗余路径的容错网络中计算出一个无环路的路径,使一部分端口处于…...
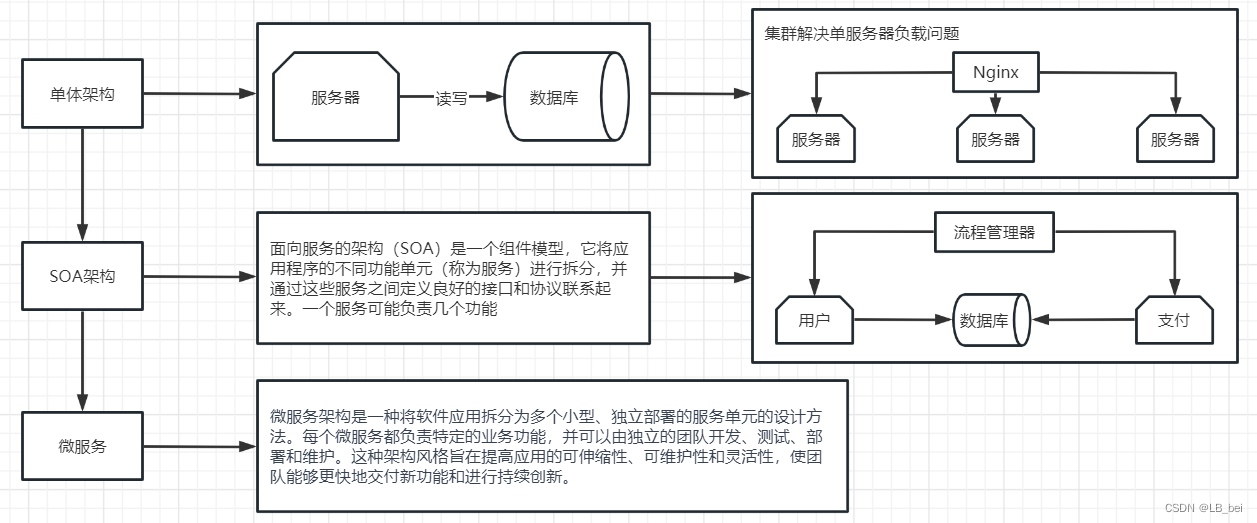
3.微服务概述
1.大型网络架构变迁 SOA与微服务最大的差别就是服务拆分的细度,目前大多数微服务实际上是SOA架构,真正的微服务应该是一个接口对应一个服务器,开发速度快、成本高; 微服务SOA能拆分的就拆分是整体的,服务能放一起的都…...
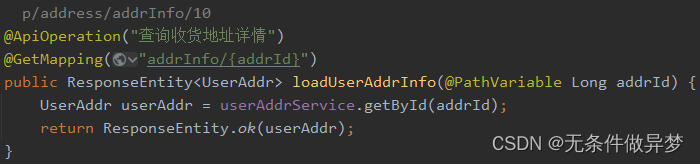
cloud_mall-notes02
1、多条件分页查询page ApiOperation("多条件分页查询xxxx")GetMapping("page")PreAuthorize("hasAuthority(模块权限:权限:page)")public ResponseEntity<Page<实体类>> loadxxxxPage(Page<实体类> page,实体类 domain) {pag…...
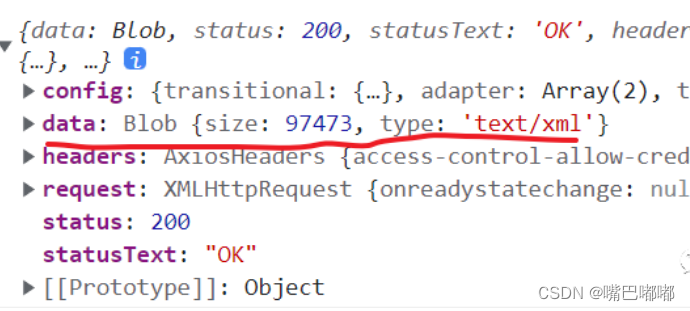
前端轻松实现文件预览(pdf、excel、word、图片)
需求:实现一个在线预览pdf、excel、word、图片等文件的功能。 介绍:支持pdf、xlsx、docx、jpg、png、jpeg。 以下使用Vue3代码实现所有功能,建议以下的预览文件标签可以在外层包裹一层弹窗。 图片预览 iframe标签能够将另一个HTML页面嵌入到…...

docker服务器、以及容器设置自动启动
一、docker服务设置自动启动 查看已启动的服务 systemctl list-units --typeservice 查看是否设置开机启动 systemctl list-unit-files | grep enable设置开机启动 systemctl enable docker.service关闭开机启动 systemctl disable docker.service 二、docker容器设置自…...

k8s集群证书过期后,如何更新k8s证书
对于版本 1.21.5,这是我的解决方案: 步骤1: ssh 到主节点,然后在步骤 2 中检查证书。 步骤2: 运行这个命令:kubeadm certs check-expiration rootkube-master-1:~# kubeadm certs check-expiration [c…...
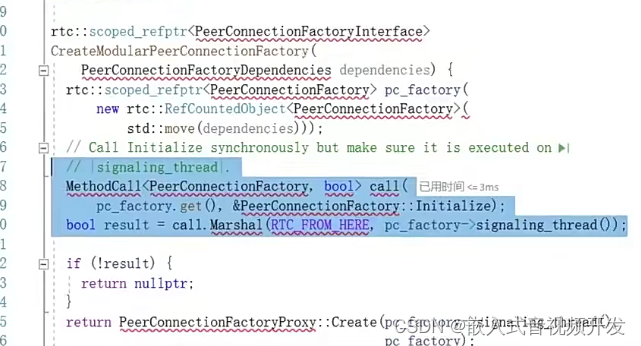
5.6.webrtc三大线程
那今天呢?我们来介绍一下web rtc的三大线程,那为什么要介绍这三大线程呢?最关键的原因在于web rtc的所有其他线程都是由这三大线程所创建的。那当我们将这三个线程理解清楚之后呢?我们就知道其他线程与它们之间是怎样关系…...
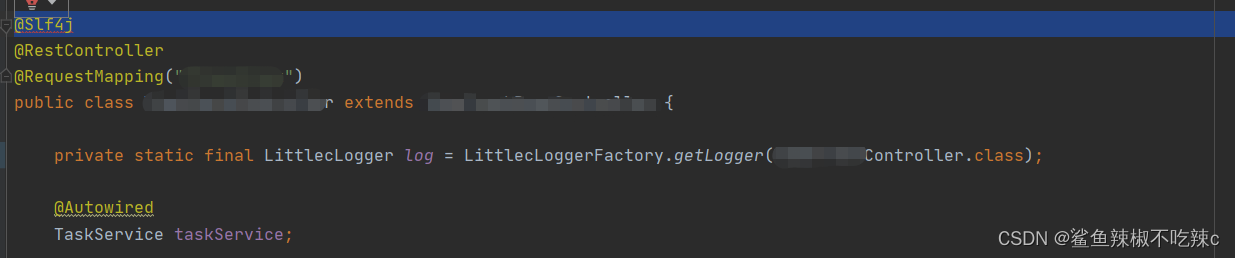
@Slf4j报错:Not generating field log: A field with same name already exists
错误出处: 错误原因: 同时使用了Slf4j注解以及LittlecLogger private static final LittlecLogger log LittlecLoggerFactory.getLogger(TimeTrackController.class); 修复方法: 将log改为LOG,便于区分,代码即用到了…...
)
Win11下CY7C68013驱动安装全攻略:从NI-VISA配置到LabVIEW识别(避坑指南)
Win11下CY7C68013驱动安装全攻略:从NI-VISA配置到LabVIEW识别(避坑指南) 在嵌入式开发与数据采集领域,CY7C68013(FX2LP)作为赛普拉斯经典的USB 2.0控制器芯片,因其高性价比和灵活的可编程特性&a…...

GHelper:华硕笔记本性能调控的轻量革命
GHelper:华硕笔记本性能调控的轻量革命 【免费下载链接】g-helper Lightweight Armoury Crate alternative for Asus laptops. Control tool for ROG Zephyrus G14, G15, G16, M16, Flow X13, Flow X16, TUF, Strix, Scar and other models 项目地址: https://git…...

VibeVoice开源TTS在政务场景落地:政策解读语音包批量生成案例
VibeVoice开源TTS在政务场景落地:政策解读语音包批量生成案例 1. 项目背景与需求场景 在日常政务工作中,政策文件的传达和解读是一项重要但耗时的工作。传统的政策解读需要工作人员逐字阅读,或者录制语音讲解,这个过程既费时又费…...

华硕笔记本轻量级工具GHelper:性能优化与硬件调控全指南
华硕笔记本轻量级工具GHelper:性能优化与硬件调控全指南 【免费下载链接】g-helper Lightweight Armoury Crate alternative for Asus laptops. Control tool for ROG Zephyrus G14, G15, G16, M16, Flow X13, Flow X16, TUF, Strix, Scar and other models 项目地…...

生产者消费者模型详解
一、什么是生产者消费者模型?生产者消费者模型的核心逻辑很简单:存在两类线程(生产者线程、消费者线程),通过一个“缓冲区”(也叫“消息队列”)实现通信,生产者线程负责生成数据并放…...

它来了,万元以内!这台五轴3D打印机,还有一个杀手锏是AI
TOP.E R1:正在拉开消费级AI 3D打印的序幕。2026年TCT亚洲展已经落下帷幕。如果你问,这次展会上有没有让人眼前一亮的产品,我们会把这一票投给高能数造(广州)技术有限公司(以下简称“高能数造”)…...
)
ComfyUI+SVD模型实战:5分钟搞定你的第一个AI生成视频(附完整工作流)
ComfyUISVD模型极简入门:零代码生成你的首支AI视频 第一次接触AI视频生成时,我被那些从文字或图片"活过来"的动态效果震撼了。作为一个完全不懂编程的设计爱好者,原本以为这种技术离我很远,直到发现ComfyUISVD这个组合—…...

RVC模型推理性能对比:不同GPU服务器配置下的速度与效果评测
RVC模型推理性能对比:不同GPU服务器配置下的速度与效果评测 最近在折腾RVC模型,发现一个挺实际的问题:同样的模型,放在不同的GPU服务器上跑,效果和速度能差多少?这直接关系到我们做项目时的成本预算和体验…...
)
Win10安装EMQX保姆级教程:解决‘Unable to load emulator DLL‘报错(附Erlang/OTP下载加速)
Win10安装EMQX全流程指南:从Erlang配置到MQTT服务搭建 在物联网和实时消息传递领域,EMQX作为一款高性能的MQTT消息代理服务器,已经成为开发者构建分布式物联网平台的首选工具之一。然而,对于Windows平台的新手开发者来说ÿ…...

用Proteus仿真51单片机测速系统,从传感器选型到代码调试的完整避坑指南
Proteus仿真51单片机测速系统实战:从传感器选型到调试的深度解析 当你在深夜的实验室里盯着屏幕上跳动的错误提示,51单片机测速系统的仿真结果始终与预期不符——这种挫败感我太熟悉了。本文将带你穿越Proteus仿真的迷雾,从硬件选型到代码调试…...