OpenCV图片校正
OpenCV图片校正
- 背景
- 几种校正方法
- 1.傅里叶变换 + 霍夫变换+ 直线 + 角度 + 旋转
- 3.四点透视 + 角度 + 旋转
- 4.检测矩形轮廓 + 角度 + 旋转
- 参考
背景
遇到偏的图片想要校正成水平或者垂直的。
几种校正方法
对于倾斜的图片通过矫正可以得到水平的图片。一般有如下几种基于opencv的组合方式进行图片矫正。
- 1、傅里叶变换 + 霍夫变换+ 直线 + 角度 + 旋转
- 2、边缘检测 + 霍夫变换 + 直线+角度 + 旋转
- 3、四点透视 + 角度 + 旋转
- 4、检测矩形轮廓 + 角度 + 旋转
1.傅里叶变换 + 霍夫变换+ 直线 + 角度 + 旋转
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <iostream>using namespace cv;
using namespace std;// 二值化阈值
#define GRAY_THRESH 150// 直线上点的个数
#define HOUGH_VOTE 50int main(int argc, char **argv)
{//Read a single-channel imageconst char* filename = "31.png";Mat srcImg = imread(filename, CV_LOAD_IMAGE_GRAYSCALE);if (srcImg.empty())return -1;imshow("source", srcImg);Point center(srcImg.cols / 2, srcImg.rows / 2);//Expand image to an optimal size, for faster processing speed//Set widths of borders in four directions//If borderType==BORDER_CONSTANT, fill the borders with (0,0,0)Mat padded;int opWidth = getOptimalDFTSize(srcImg.rows);int opHeight = getOptimalDFTSize(srcImg.cols);copyMakeBorder(srcImg, padded, 0, opWidth - srcImg.rows, 0, opHeight - srcImg.cols, BORDER_CONSTANT, Scalar::all(0));Mat planes[] = { Mat_<float>(padded), Mat::zeros(padded.size(), CV_32F) };Mat comImg;//Merge into a double-channel imagemerge(planes, 2, comImg);//Use the same image as input and output,//so that the results can fit in Mat welldft(comImg, comImg);//Compute the magnitude//planes[0]=Re(DFT(I)), planes[1]=Im(DFT(I))//magnitude=sqrt(Re^2+Im^2)split(comImg, planes);magnitude(planes[0], planes[1], planes[0]);//Switch to logarithmic scale, for better visual results//M2=log(1+M1)Mat magMat = planes[0];magMat += Scalar::all(1);log(magMat, magMat);//Crop the spectrum//Width and height of magMat should be even, so that they can be divided by 2//-2 is 11111110 in binary system, operator & make sure width and height are always evenmagMat = magMat(Rect(0, 0, magMat.cols & -2, magMat.rows & -2));//Rearrange the quadrants of Fourier image,//so that the origin is at the center of image,//and move the high frequency to the cornersint cx = magMat.cols / 2;int cy = magMat.rows / 2;Mat q0(magMat, Rect(0, 0, cx, cy));Mat q1(magMat, Rect(0, cy, cx, cy));Mat q2(magMat, Rect(cx, cy, cx, cy));Mat q3(magMat, Rect(cx, 0, cx, cy));Mat tmp;q0.copyTo(tmp);q2.copyTo(q0);tmp.copyTo(q2);q1.copyTo(tmp);q3.copyTo(q1);tmp.copyTo(q3);//Normalize the magnitude to [0,1], then to[0,255]normalize(magMat, magMat, 0, 1, CV_MINMAX);Mat magImg(magMat.size(), CV_8UC1);magMat.convertTo(magImg, CV_8UC1, 255, 0);imshow("magnitude", magImg);//imwrite("imageText_mag.jpg",magImg);//Turn into binary imagethreshold(magImg, magImg, GRAY_THRESH, 255, CV_THRESH_BINARY);imshow("mag_binary", magImg);//imwrite("imageText_bin.jpg",magImg);//Find lines with Hough Transformationvector<Vec2f> lines;float pi180 = (float)CV_PI / 180;Mat linImg(magImg.size(), CV_8UC3);HoughLines(magImg, lines, 1, pi180, HOUGH_VOTE, 0, 0);int numLines = lines.size();for (int l = 0; l<numLines; l++){float rho = lines[l][0], theta = lines[l][1];Point pt1, pt2;double a = cos(theta), b = sin(theta);double x0 = a*rho, y0 = b*rho;pt1.x = cvRound(x0 + 1000 * (-b));pt1.y = cvRound(y0 + 1000 * (a));pt2.x = cvRound(x0 - 1000 * (-b));pt2.y = cvRound(y0 - 1000 * (a));line(linImg, pt1, pt2, Scalar(255, 0, 0), 3, 8, 0);}imshow("lines", linImg);//imwrite("imageText_line.jpg",linImg);if (lines.size() == 3){cout << "found three angels:" << endl;cout << lines[0][1] * 180 / CV_PI << endl << lines[1][1] * 180 / CV_PI << endl << lines[2][1] * 180 / CV_PI << endl << endl;}//Find the proper angel from the three found angelsfloat angel = 0;float piThresh = (float)CV_PI / 90;float pi2 = CV_PI / 2;for (int l = 0; l<numLines; l++){float theta = lines[l][1];if (abs(theta) < piThresh || abs(theta - pi2) < piThresh)continue;else{angel = theta;break;}}//Calculate the rotation angel//The image has to be square,//so that the rotation angel can be calculate rightangel = angel<pi2 ? angel : angel - CV_PI;if (angel != pi2){float angelT = srcImg.rows*tan(angel) / srcImg.cols;angel = atan(angelT);}float angelD = angel * 180 / (float)CV_PI;cout << "the rotation angel to be applied:" << endl << angelD << endl << endl;//Rotate the image to recoverMat rotMat = getRotationMatrix2D(center, angelD, 1.0);Mat dstImg = Mat::ones(srcImg.size(), CV_8UC3);warpAffine(srcImg, dstImg, rotMat, srcImg.size(), 1, 0, Scalar(255, 255, 255));imshow("result", dstImg);//imwrite("imageText_D.jpg",dstImg);waitKey(0);return 0;
}
opencv4x
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgcodecs/legacy/constants_c.h>
#include <iostream>using namespace cv;
using namespace std;// 二值化阈值
#define GRAY_THRESH 150// 直线上点的个数
#define HOUGH_VOTE 50int main(int argc, char **argv)
{//Read a single-channel imageconst char* filename = argv[1];Mat srcImg = imread(filename, CV_LOAD_IMAGE_GRAYSCALE);if (srcImg.empty())return -1;imshow("source", srcImg);Point center(srcImg.cols / 2, srcImg.rows / 2);//Expand image to an optimal size, for faster processing speed//Set widths of borders in four directions//If borderType==BORDER_CONSTANT, fill the borders with (0,0,0)Mat padded;int opWidth = getOptimalDFTSize(srcImg.rows);int opHeight = getOptimalDFTSize(srcImg.cols);copyMakeBorder(srcImg, padded, 0, opWidth - srcImg.rows, 0, opHeight - srcImg.cols, BORDER_CONSTANT, Scalar::all(0));Mat planes[] = { Mat_<float>(padded), Mat::zeros(padded.size(), CV_32F) };Mat comImg;//Merge into a double-channel imagemerge(planes, 2, comImg);//Use the same image as input and output,//so that the results can fit in Mat welldft(comImg, comImg);//Compute the magnitude//planes[0]=Re(DFT(I)), planes[1]=Im(DFT(I))//magnitude=sqrt(Re^2+Im^2)split(comImg, planes);magnitude(planes[0], planes[1], planes[0]);//Switch to logarithmic scale, for better visual results//M2=log(1+M1)Mat magMat = planes[0];magMat += Scalar::all(1);log(magMat, magMat);//Crop the spectrum//Width and height of magMat should be even, so that they can be divided by 2//-2 is 11111110 in binary system, operator & make sure width and height are always evenmagMat = magMat(Rect(0, 0, magMat.cols & -2, magMat.rows & -2));//Rearrange the quadrants of Fourier image,//so that the origin is at the center of image,//and move the high frequency to the cornersint cx = magMat.cols / 2;int cy = magMat.rows / 2;Mat q0(magMat, Rect(0, 0, cx, cy));Mat q1(magMat, Rect(0, cy, cx, cy));Mat q2(magMat, Rect(cx, cy, cx, cy));Mat q3(magMat, Rect(cx, 0, cx, cy));Mat tmp;q0.copyTo(tmp);q2.copyTo(q0);tmp.copyTo(q2);q1.copyTo(tmp);q3.copyTo(q1);tmp.copyTo(q3);//Normalize the magnitude to [0,1], then to[0,255]//normalize(magMat, magMat, 0, 1, CV_MINMAX);normalize(magMat, magMat, 0, 1, NORM_MINMAX);Mat magImg(magMat.size(), CV_8UC1);magMat.convertTo(magImg, CV_8UC1, 255, 0);imshow("magnitude", magImg);//imwrite("imageText_mag.jpg",magImg);//Turn into binary imagethreshold(magImg, magImg, GRAY_THRESH, 255, cv::THRESH_BINARY);imshow("mag_binary", magImg);//imwrite("imageText_bin.jpg",magImg);//Find lines with Hough Transformationvector<Vec2f> lines;float pi180 = (float)CV_PI / 180;Mat linImg(magImg.size(), CV_8UC3);HoughLines(magImg, lines, 1, pi180, HOUGH_VOTE, 0, 0);int numLines = lines.size();for (int l = 0; l<numLines; l++){float rho = lines[l][0], theta = lines[l][1];Point pt1, pt2;double a = cos(theta), b = sin(theta);double x0 = a*rho, y0 = b*rho;pt1.x = cvRound(x0 + 1000 * (-b));pt1.y = cvRound(y0 + 1000 * (a));pt2.x = cvRound(x0 - 1000 * (-b));pt2.y = cvRound(y0 - 1000 * (a));line(linImg, pt1, pt2, Scalar(255, 0, 0), 3, 8, 0);}imshow("lines", linImg);//imwrite("imageText_line.jpg",linImg);if (lines.size() == 3){cout << "found three angels:" << endl;cout << lines[0][1] * 180 / CV_PI << endl << lines[1][1] * 180 / CV_PI << endl << lines[2][1] * 180 / CV_PI << endl << endl;}//Find the proper angel from the three found angelsfloat angel = 0;float piThresh = (float)CV_PI / 90;float pi2 = CV_PI / 2;for (int l = 0; l<numLines; l++){float theta = lines[l][1];if (abs(theta) < piThresh || abs(theta - pi2) < piThresh)continue;else{angel = theta;break;}}//Calculate the rotation angel//The image has to be square,//so that the rotation angel can be calculate rightangel = angel<pi2 ? angel : angel - CV_PI;if (angel != pi2){float angelT = srcImg.rows*tan(angel) / srcImg.cols;angel = atan(angelT);}//float angelD = angel * 180 / (float)CV_PI;float angelD = angel * 180 / (float)CV_PI;cout << "the rotation angel to be applied: "<< angelD << endl << endl;//Rotate the image to recoverMat rotMat = getRotationMatrix2D(center, angelD, 1.0);Mat dstImg = Mat::ones(srcImg.size(), CV_8UC3);warpAffine(srcImg, dstImg, rotMat, srcImg.size(), 1, 0, Scalar(255, 255, 255));imshow("result", dstImg);imwrite("imageText_D.jpg",dstImg);waitKey(0);return 0;
}
CMakeLists.txt
project( main )
cmake_minimum_required(VERSION 3.10)
#添加头文件路径
include_directories(/usr/local/include /usr/local/include/opencv4 /usr/local/include/opencv4/opencv2)
#添加库文件路径
link_directories(/usr/local/lib)add_executable(main test.cpp)
target_link_libraries( main -lopencv_core -lopencv_highgui -lopencv_imgproc -lopencv_imgcodecs)


3.四点透视 + 角度 + 旋转
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
#include <iostream>
using namespace cv;
using namespace std;// 直线上点的个数
#define HOUGH_VOTE 50//度数转换
double DegreeTrans(double theta)
{double res = theta / CV_PI * 180;return res;
}//逆时针旋转图像degree角度(原尺寸)
void rotateImage(Mat src, Mat& img_rotate, double degree)
{//旋转中心为图像中心 Point2f center;center.x = float(src.cols / 2.0);center.y = float(src.rows / 2.0);int length = 0;length = sqrt(src.cols*src.cols + src.rows*src.rows);//计算二维旋转的仿射变换矩阵 Mat M = getRotationMatrix2D(center, degree, 1);warpAffine(src, img_rotate, M, Size(length, length), 1, 0, Scalar(255, 255, 255));//仿射变换,背景色填充为白色
}//通过霍夫变换计算角度
double CalcDegree(const Mat &srcImage, Mat &dst)
{Mat midImage, dstImage;Canny(srcImage, midImage, 50, 200, 3);cvtColor(midImage, dstImage, CV_GRAY2BGR);//通过霍夫变换检测直线vector<Vec2f> lines;HoughLines(midImage, lines, 1, CV_PI / 180, HOUGH_VOTE);//第5个参数就是阈值,阈值越大,检测精度越高//cout << lines.size() << endl;//由于图像不同,阈值不好设定,因为阈值设定过高导致无法检测直线,阈值过低直线太多,速度很慢//所以根据阈值由大到小设置了三个阈值,如果经过大量试验后,可以固定一个适合的阈值。float sum = 0;//依次画出每条线段for (size_t i = 0; i < lines.size(); i++){float rho = lines[i][0];float theta = lines[i][1];Point pt1, pt2;//cout << theta << endl;double a = cos(theta), b = sin(theta);double x0 = a*rho, y0 = b*rho;pt1.x = cvRound(x0 + 1000 * (-b));pt1.y = cvRound(y0 + 1000 * (a));pt2.x = cvRound(x0 - 1000 * (-b));pt2.y = cvRound(y0 - 1000 * (a));//只选角度最小的作为旋转角度sum += theta;line(dstImage, pt1, pt2, Scalar(55, 100, 195), 1, LINE_AA); //Scalar函数用于调节线段颜色imshow("直线探测效果图", dstImage);}float average = sum / lines.size(); //对所有角度求平均,这样做旋转效果会更好cout << "average theta:" << average << endl;double angle = DegreeTrans(average) - 90;rotateImage(dstImage, dst, angle);//imshow("直线探测效果图2", dstImage);return angle;
}void ImageRecify(const char* pInFileName, const char* pOutFileName)
{double degree;Mat src = imread(pInFileName);imshow("原始图", src);Mat dst;//倾斜角度矫正degree = CalcDegree(src, dst);rotateImage(src, dst, degree);cout << "angle:" << degree << endl;imshow("旋转调整后", dst);Mat resulyImage = dst(Rect(0, 0, dst.cols, 500)); //根据先验知识,估计好文本的长宽,再裁剪下来imshow("裁剪之后", resulyImage);imwrite("recified.jpg", resulyImage);
}int main()
{ImageRecify("31.png", "FinalImage.jpg");waitKey();return 0;
}
opencv4.x
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
#include <iostream>
using namespace cv;
using namespace std;// 直线上点的个数
#define HOUGH_VOTE 50//度数转换
double DegreeTrans(double theta)
{double res = theta / CV_PI * 180;return res;
}//逆时针旋转图像degree角度(原尺寸)
void rotateImage(Mat src, Mat& img_rotate, double degree)
{//旋转中心为图像中心 Point2f center;center.x = float(src.cols / 2.0);center.y = float(src.rows / 2.0);int length = 0;length = sqrt(src.cols*src.cols + src.rows*src.rows);//计算二维旋转的仿射变换矩阵 Mat M = getRotationMatrix2D(center, degree, 1);warpAffine(src, img_rotate, M, Size(length, length), 1, 0, Scalar(255, 255, 255));//仿射变换,背景色填充为白色
}//通过霍夫变换计算角度
double CalcDegree(const Mat &srcImage, Mat &dst)
{Mat midImage, dstImage;Canny(srcImage, midImage, 50, 200, 3);cvtColor(midImage, dstImage, COLOR_GRAY2BGR);//通过霍夫变换检测直线vector<Vec2f> lines;HoughLines(midImage, lines, 1, CV_PI / 180, HOUGH_VOTE);//第5个参数就是阈值,阈值越大,检测精度越高//cout << lines.size() << endl;//由于图像不同,阈值不好设定,因为阈值设定过高导致无法检测直线,阈值过低直线太多,速度很慢//所以根据阈值由大到小设置了三个阈值,如果经过大量试验后,可以固定一个适合的阈值。float sum = 0;//依次画出每条线段for (size_t i = 0; i < lines.size(); i++){float rho = lines[i][0];float theta = lines[i][1];Point pt1, pt2;//cout << theta << endl;double a = cos(theta), b = sin(theta);double x0 = a*rho, y0 = b*rho;pt1.x = cvRound(x0 + 1000 * (-b));pt1.y = cvRound(y0 + 1000 * (a));pt2.x = cvRound(x0 - 1000 * (-b));pt2.y = cvRound(y0 - 1000 * (a));//只选角度最小的作为旋转角度sum += theta;line(dstImage, pt1, pt2, Scalar(55, 100, 195), 1, LINE_AA); //Scalar函数用于调节线段颜色imshow("直线探测效果图", dstImage);}float average = sum / lines.size(); //对所有角度求平均,这样做旋转效果会更好cout << "average theta:" << average << endl;double angle = DegreeTrans(average) - 90;rotateImage(dstImage, dst, angle);//imshow("直线探测效果图2", dstImage);return angle;
}void ImageRecify(const char* pInFileName, const char* pOutFileName)
{double degree;Mat src = imread(pInFileName);imshow("原始图", src);Mat dst;//倾斜角度矫正degree = CalcDegree(src, dst);rotateImage(src, dst, degree);cout << "angle:" << degree << endl;imshow("旋转调整后", dst);Mat resulyImage = dst(Rect(0, 0, dst.cols, 1000)); //根据先验知识,估计好文本的长宽,再裁剪下来imshow("裁剪之后", resulyImage);imwrite("recified.jpg", resulyImage);
}int main()
{ImageRecify("test.jpg", "FinalImage.jpg");waitKey();return 0;
}4.检测矩形轮廓 + 角度 + 旋转
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
#include <iostream>
using namespace cv;
using namespace std;
#include <algorithm>bool x_sort(const Point2f & m1, const Point2f & m2)
{return m1.x < m2.x;
}//第一个参数:输入图片名称;第二个参数:输出图片名称
void GetContoursPic(const char* pSrcFileName, const char* pDstFileName)
{Mat srcImg = imread(pSrcFileName);imshow("原始图", srcImg);Mat gray, binImg;//灰度化cvtColor(srcImg, gray, COLOR_RGB2GRAY);imshow("灰度图", gray);//二值化threshold(gray, binImg, 150, 200, CV_THRESH_BINARY);imshow("二值化", binImg);vector<Point> contours;vector<vector<Point> > f_contours;//注意第5个参数为CV_RETR_EXTERNAL,只检索外框 findContours(binImg, f_contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_NONE); //找轮廓int max_area = 0;int index;for (int i = 0; i < f_contours.size(); i++){double tmparea = fabs(contourArea(f_contours[i]));if (tmparea > max_area){index = i;max_area = tmparea;}}contours = f_contours[index];CvBox2D rect = minAreaRect(Mat(contours));float angle = rect.angle;cout << "before angle : " << angle << endl;if (angle < -45)angle = (90 + angle);elseangle = -angle;cout << "after angle : " << angle << endl;//新建一个感兴趣的区域图,大小跟原图一样大 Mat RoiSrcImg(srcImg.rows, srcImg.cols, CV_8UC3); //注意这里必须选CV_8UC3RoiSrcImg.setTo(0); //颜色都设置为黑色 //imshow("新建的ROI", RoiSrcImg);//对得到的轮廓填充一下 drawContours(binImg, f_contours, 0, Scalar(255), CV_FILLED);//抠图到RoiSrcImgsrcImg.copyTo(RoiSrcImg, gray);//再显示一下看看,除了感兴趣的区域,其他部分都是黑色的了 namedWindow("RoiSrcImg", 1);imshow("RoiSrcImg", RoiSrcImg);//创建一个旋转后的图像 Mat RatationedImg(RoiSrcImg.rows, RoiSrcImg.cols, CV_8UC1);RatationedImg.setTo(0);//对RoiSrcImg进行旋转 Point2f center = rect.center; //中心点 Mat M2 = getRotationMatrix2D(center, angle, 1);//计算旋转加缩放的变换矩阵 warpAffine(RoiSrcImg, RatationedImg, M2, RoiSrcImg.size(), 1, 0, Scalar(0));//仿射变换 imshow("旋转之后", RatationedImg);
}void main()
{GetContoursPic("34.png", "FinalImage.jpg");waitKey();
}
opencv4.x
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
#include <opencv2/imgproc/types_c.h>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <iostream>using namespace cv;
using namespace std;
#include <algorithm>bool x_sort(const Point2f & m1, const Point2f & m2)
{return m1.x < m2.x;
}//第一个参数:输入图片名称;第二个参数:输出图片名称
void GetContoursPic(const char* pSrcFileName, const char* pDstFileName)
{Mat srcImg = imread(pSrcFileName);imshow("原始图", srcImg);Mat gray, binImg;//灰度化cvtColor(srcImg, gray, COLOR_RGB2GRAY);imshow("灰度图", gray);//二值化threshold(gray, binImg, 150, 200, cv::THRESH_BINARY);imshow("二值化", binImg);vector<Point> contours;vector<vector<Point> > f_contours;//注意第5个参数为CV_RETR_EXTERNAL,只检索外框 findContours(binImg, f_contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_NONE); //找轮廓int max_area = 0;int index;for (int i = 0; i < f_contours.size(); i++){double tmparea = fabs(contourArea(f_contours[i]));if (tmparea > max_area){index = i;max_area = tmparea;}}contours = f_contours[index];RotatedRect rect = minAreaRect(Mat(contours));float angle = rect.angle;cout << "before angle : " << angle << endl;if (angle < -45)angle = (90 + angle);elseangle = -angle;cout << "after angle : " << angle << endl;//新建一个感兴趣的区域图,大小跟原图一样大 Mat RoiSrcImg(srcImg.rows, srcImg.cols, CV_8UC3); //注意这里必须选CV_8UC3RoiSrcImg.setTo(0); //颜色都设置为黑色 //imshow("新建的ROI", RoiSrcImg);//对得到的轮廓填充一下 drawContours(binImg, f_contours, 0, Scalar(255), cv::FILLED);//抠图到RoiSrcImgsrcImg.copyTo(RoiSrcImg, gray);//再显示一下看看,除了感兴趣的区域,其他部分都是黑色的了 namedWindow("RoiSrcImg", 1);imshow("RoiSrcImg", RoiSrcImg);//创建一个旋转后的图像 Mat RatationedImg(RoiSrcImg.rows, RoiSrcImg.cols, CV_8UC1);RatationedImg.setTo(0);//对RoiSrcImg进行旋转 Point2f center = rect.center; //中心点 Mat M2 = getRotationMatrix2D(center, angle, 1);//计算旋转加缩放的变换矩阵 warpAffine(RoiSrcImg, RatationedImg, M2, RoiSrcImg.size(), 1, 0, Scalar(0));//仿射变换 imshow("旋转之后", RatationedImg);imwrite("recified.jpg", RatationedImg);
}int main()
{GetContoursPic("test.jpg", "FinalImage.jpg");waitKey();return 0;
}
参考
- 榴莲小怪兽 opencv-图片矫正
- OpenCV利用透视变换矫正图像
相关文章:
OpenCV图片校正
OpenCV图片校正 背景几种校正方法1.傅里叶变换 霍夫变换 直线 角度 旋转3.四点透视 角度 旋转4.检测矩形轮廓 角度 旋转参考 背景 遇到偏的图片想要校正成水平或者垂直的。 几种校正方法 对于倾斜的图片通过矫正可以得到水平的图片。一般有如下几种基于opencv的组合方…...
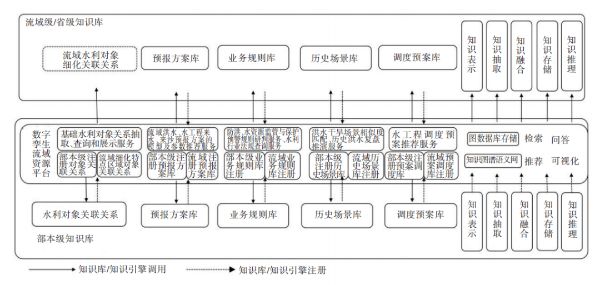
数字孪生流域共建共享相关政策解读
当前数字孪生技术在水利方面的应用刚起步,2021年水利部首次提出“数字孪生流域”概念,即以物理流域为单元、时空数据为底座、数学模型为核心、水利知识为驱动,对物理流域全要素和水利治理管理活动全过程的数字映射、智能模拟、前瞻预演&#…...
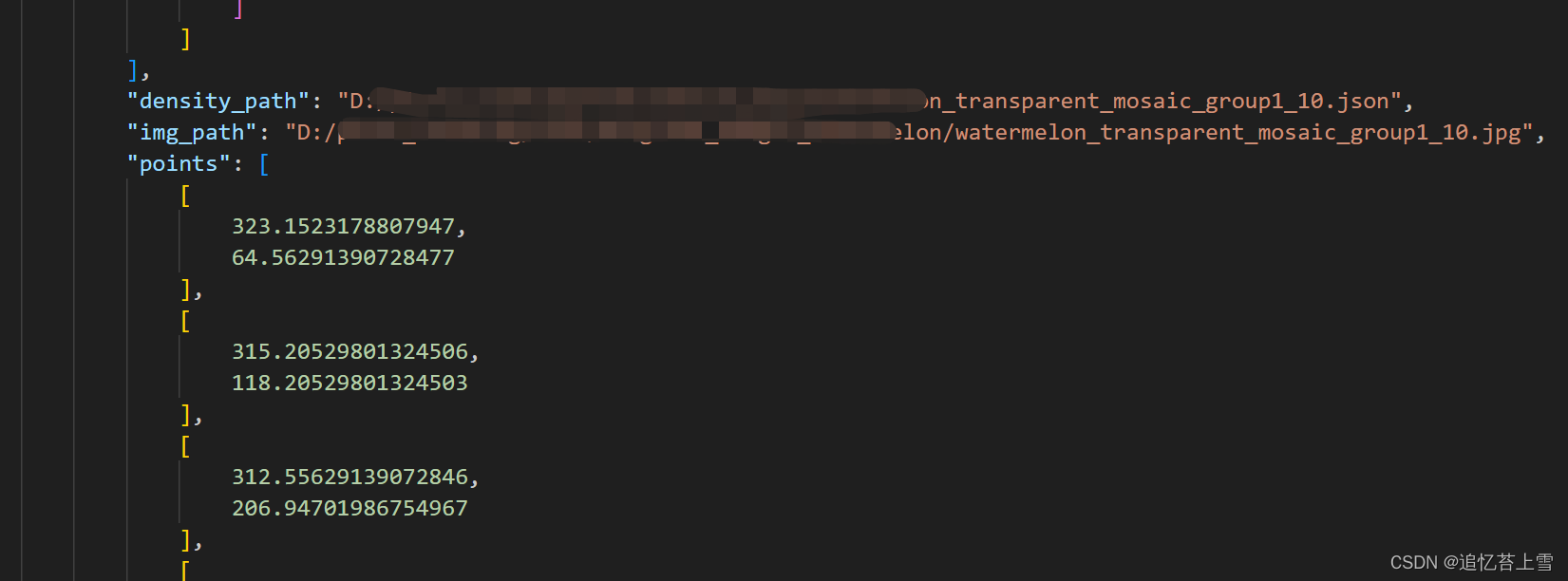
FSC147数据集格式解析
一. 引言 在研究很多深度学习框架的时候,往往需要使用到FSC147格式数据集,若要是想在自己的数据集上验证深度学习框架,就需要自己制作数据集以及相关标签,在论文Learning To Count Everything中,该数据集首次被提出。 …...

el-element中el-tabs案例的使用
el-element中el-tabs的使用 代码呈现 <template><div class"enterprise-audit"><div class"card"><div class"cardTitle"><p>交易查询</p></div><el-tabs v-model"activeName" tab-cl…...

tomcat结构目录有哪些?
bin 启动,关闭和其他脚本。这些 .sh文件(对于Unix系统)是这些.bat文件的功能副本(对于 Windows系统)。由于Win32命令行缺少某些功能,因此此处包含一些其他文件。 比如说:windows下启动tomcat用的…...
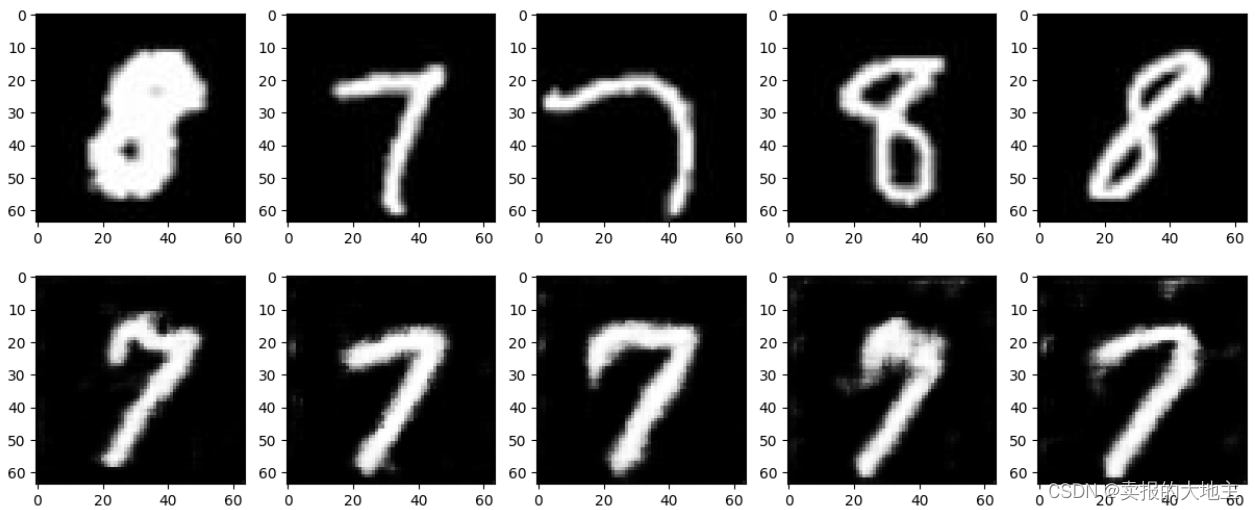
生成式AI系列 —— DCGAN生成手写数字
1、模型构建 1.1 构建生成器 # 导入软件包 import torch import torch.nn as nnclass Generator(nn.Module):def __init__(self, z_dim20, image_size256):super(Generator, self).__init__()self.layer1 nn.Sequential(nn.ConvTranspose2d(z_dim, image_size * 32,kernel_s…...

vscode-vue项目格式化+语法检验-草稿
Vue学习笔记7 - 在Vscode中配置Vetur,ESlint,Prettier_vetur规则_Myron.Maoyz的博客-CSDN博客...
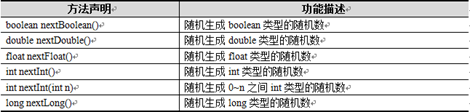
【Java从0到1学习】10 Java常用类汇总
1. System类 System类对读者来说并不陌生,因为在之前所学知识中,需要打印结果时,使用的都是“System.out.println();”语句,这句代码中就使用了System类。System类定义了一些与系统相关的属性和方法,它所提供的属性和…...

第三届人工智能与智能制造国际研讨会(AIIM 2023)
第三届人工智能与智能制造国际研讨会(AIIM 2023) The 3rd International Symposium on Artificial Intelligence and Intelligent Manufacturing 第三届人工智能与智能制造国际研讨会(AIIM 2023)将于2023年10月27-29日在成都召开…...
层次分析法
目录 一:问题的引入 二:模型的建立 1.分析系统中各因素之间的关系,建立系统的递阶层次结构。 2.对于同一层次的各元素关于上一层次中某一准则的重要性进行两两比较,构造两两比较矩阵(判断矩阵)。 3.由判…...

Error Handling
有几个特定的异常类允许用户代码对与CAN总线相关的特定场景做出反应: Exception (Python standard library)+-- ...+-- CanError (python-can)+-- CanInterfaceNotImplementedError+-- CanInitializationError...
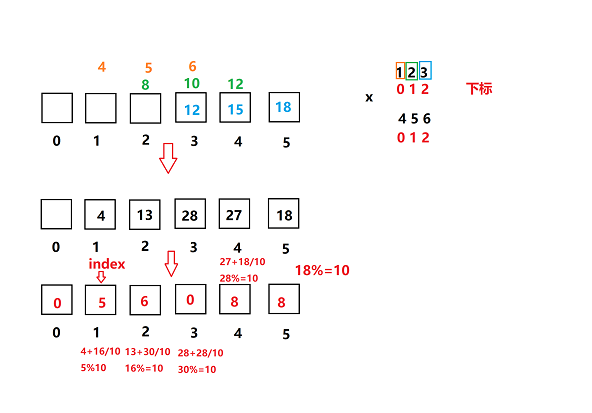
leetcode:字符串相乘(两种方法)
题目: 给定两个以字符串形式表示的非负整数 num1 和 num2,返回 num1 和 num2 的乘积,它们的乘积也表示为字符串形式。 注意:不能使用任何内置的 BigInteger 库或直接将输入转换为整数。 示例 1: 输入: num1 "2", nu…...
【爬虫练习之glidedsky】爬虫-基础2
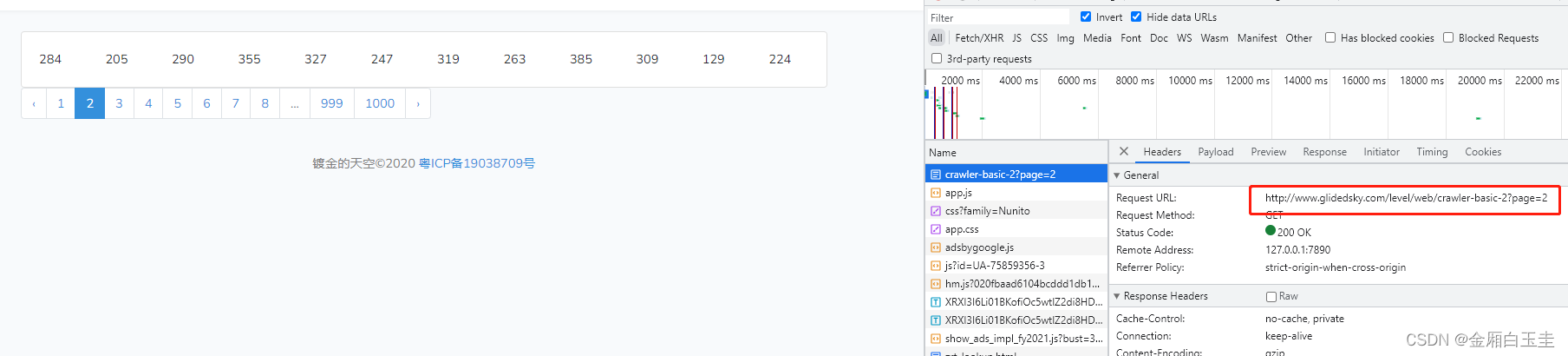
题目 链接 爬虫往往不能在一个页面里面获取全部想要的数据,需要访问大量的网页才能够完成任务。 这里有一个网站,还是求所有数字的和,只是这次分了1000页。 思路 找到调用接口 可以看到后面有个参数page来控制页码 代码实现 import reques…...

03.有监督算法——决策树
1.决策树算法 决策树算法可以做分类,也可以做回归 决策树的训练与测试: 训练阶段:从给定的训练集构造出一棵树(从根节点开始选择特征,如何进行特征切分) 测试阶段:根据构造出来的树模型从上…...
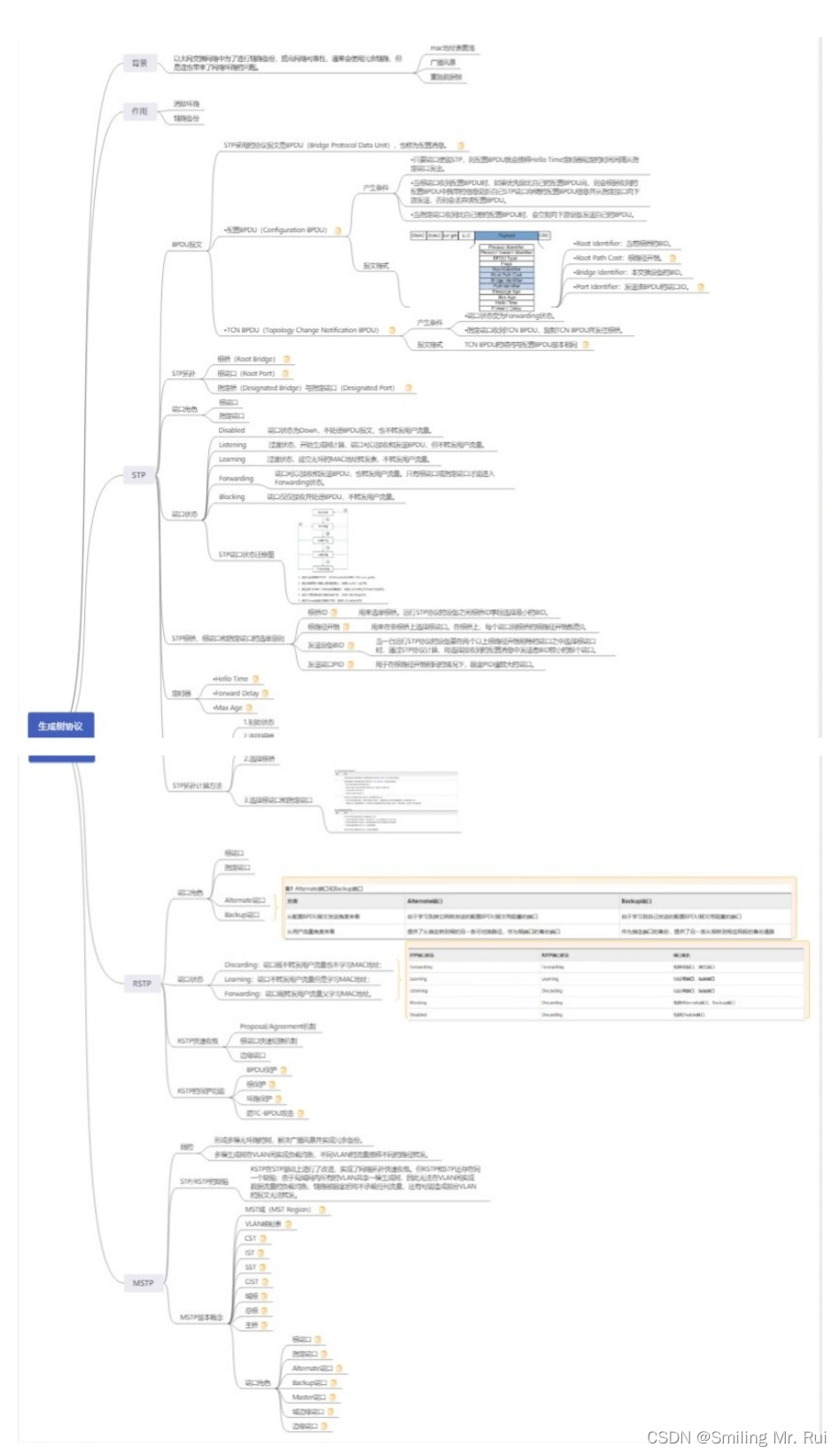
网络协议详解之STP
目录 一、STP协议(生成树) 1.1 生成树协议核心知识点: 1.2 生成树协议与导致问题: 生成树含义: 1.3 802.1D 规则: 802.1D 缺点: 1.4 PVST cisco私有 1.5 PVST 1.6 快速生成树 快速的原…...
Eltima USB Network Gate 10.0 Crack
USB Network Gate -通过网络共享USB 设备 USB Network Gate (前身为以太网USB控制器USB) 轻松的通过网络(Internet/LAN/WAN)分享您的一个或者多个连接到您计算机的USB设备。 无论您身处异国还是近在隔壁办公室,您都可以轻松使用远程扫描仪、打印机、摄像头、调制解…...
)
SpringCloudGateway网关实战(一)
SpringCloudGateway网关实战(一) 目前对cloud的gateway功能还是不太熟悉,因此特意新建了对应的应用来尝试网关功能。 网关模块搭建 首先我们新建一个父模块用于添加对应的springboot依赖和cloud依赖。本模块我们的配置读取使用的是nacos&a…...

django中使用ajax发送请求
1、ajax简单介绍 浏览器向网站发送请求时 是以URL和表单的形式提交的post 或get 请求,特点是:页面刷新 除此之外,也可以基于ajax向后台发送请求(异步) 依赖jQuery 编写ajax代码 $.ajax({url: "发送的地址"…...

C++之std::list<string>::iterator迭代器应用实例(一百七十九)
简介: CSDN博客专家,专注Android/Linux系统,分享多mic语音方案、音视频、编解码等技术,与大家一起成长! 优质专栏:Audio工程师进阶系列【原创干货持续更新中……】🚀 人生格言: 人生…...

VSCode好用的插件
文章目录 前言1.Snippet Creator & easy snippet(自定义代码)2.Indent Rainbow(代码缩进)3.Chinese (Simplified) Language Pack(中文包)4.Path Intellisense(路径提示)5.Beauti…...

IDEA运行Tomcat出现乱码问题解决汇总
最近正值期末周,有很多同学在写期末Java web作业时,运行tomcat出现乱码问题,经过多次解决与研究,我做了如下整理: 原因: IDEA本身编码与tomcat的编码与Windows编码不同导致,Windows 系统控制台…...

【OSG学习笔记】Day 18: 碰撞检测与物理交互
物理引擎(Physics Engine) 物理引擎 是一种通过计算机模拟物理规律(如力学、碰撞、重力、流体动力学等)的软件工具或库。 它的核心目标是在虚拟环境中逼真地模拟物体的运动和交互,广泛应用于 游戏开发、动画制作、虚…...
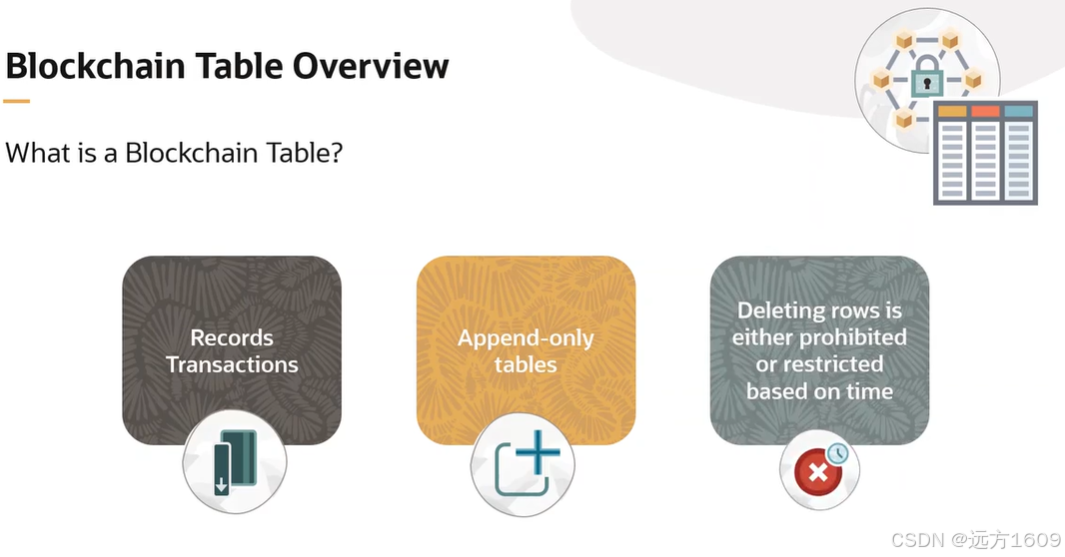
23-Oracle 23 ai 区块链表(Blockchain Table)
小伙伴有没有在金融强合规的领域中遇见,必须要保持数据不可变,管理员都无法修改和留痕的要求。比如医疗的电子病历中,影像检查检验结果不可篡改行的,药品追溯过程中数据只可插入无法删除的特性需求;登录日志、修改日志…...

Qt Widget类解析与代码注释
#include "widget.h" #include "ui_widget.h"Widget::Widget(QWidget *parent): QWidget(parent), ui(new Ui::Widget) {ui->setupUi(this); }Widget::~Widget() {delete ui; }//解释这串代码,写上注释 当然可以!这段代码是 Qt …...
cf2117E
原题链接:https://codeforces.com/contest/2117/problem/E 题目背景: 给定两个数组a,b,可以执行多次以下操作:选择 i (1 < i < n - 1),并设置 或,也可以在执行上述操作前执行一次删除任意 和 。求…...

【论文笔记】若干矿井粉尘检测算法概述
总的来说,传统机器学习、传统机器学习与深度学习的结合、LSTM等算法所需要的数据集来源于矿井传感器测量的粉尘浓度,通过建立回归模型来预测未来矿井的粉尘浓度。传统机器学习算法性能易受数据中极端值的影响。YOLO等计算机视觉算法所需要的数据集来源于…...

MySQL账号权限管理指南:安全创建账户与精细授权技巧
在MySQL数据库管理中,合理创建用户账号并分配精确权限是保障数据安全的核心环节。直接使用root账号进行所有操作不仅危险且难以审计操作行为。今天我们来全面解析MySQL账号创建与权限分配的专业方法。 一、为何需要创建独立账号? 最小权限原则…...
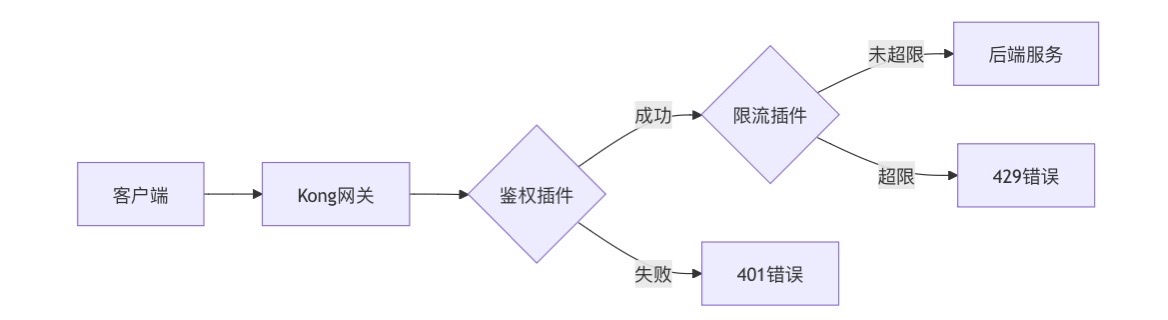
云原生安全实战:API网关Kong的鉴权与限流详解
🔥「炎码工坊」技术弹药已装填! 点击关注 → 解锁工业级干货【工具实测|项目避坑|源码燃烧指南】 一、基础概念 1. API网关(API Gateway) API网关是微服务架构中的核心组件,负责统一管理所有API的流量入口。它像一座…...
基于Java+VUE+MariaDB实现(Web)仿小米商城
仿小米商城 环境安装 nodejs maven JDK11 运行 mvn clean install -DskipTestscd adminmvn spring-boot:runcd ../webmvn spring-boot:runcd ../xiaomi-store-admin-vuenpm installnpm run servecd ../xiaomi-store-vuenpm installnpm run serve 注意:运行前…...

C语言中提供的第三方库之哈希表实现
一. 简介 前面一篇文章简单学习了C语言中第三方库(uthash库)提供对哈希表的操作,文章如下: C语言中提供的第三方库uthash常用接口-CSDN博客 本文简单学习一下第三方库 uthash库对哈希表的操作。 二. uthash库哈希表操作示例 u…...