opencv 进阶15-检测DoG特征并提取SIFT描述符cv2.SIFT_create()
前面我们已经了解了Harris函数来进行角点检测,因为角点的特性,这些角点在图像旋转的时候也可以被检测到。但是,如果我们放大或缩小图像时,就可能会丢失图像的某些部分,甚至有可能增加角点的质量。这种损失的现象需要一种与图像比例无关的角点检测方法来解决。
SIFT(Scale-Invariant Feature Transform)尺度不变特征变换可以解决这个问题。
注意: SIFT 并不检测关键点(关键点由Difference of Gaussians检测),SIFT会通过一个特征向量来描述关键点周围区域的情况。DoG操作的最终结果会得到感兴趣的区域(关键点),这将通过SIFT来进行说明。
函数说明:
sift =cv2.SIFT_create([, nfeatures[, nOctaveLayers[,
contrastThreshold[, edgeThreshold]]]])
参数:
-
nfeatures: 保留的最佳功能的数量。这些特征按其分数排名(在SIFT算法中作为局部对比度测量)。
-
nOctaveLayers:每个八度中的层数。3是D.Lowe(原作者)论文中使用的值。八度的数量是根据图像分辨率自动计算的。
-
contrastThreshold:用于过滤掉半均匀(低对比度)区域中的弱特征的对比度阈值。阈值越大,检测器产生的特征越少。应用过滤时,对比度阈值将被nOctaveLayers除。当nOctaveLayers设置为默认值并且如果要使用D.Lowe论文中使用的值0.03时,请将此参数设置为0.09。
-
edgeThreshold:用于过滤边缘特征的阈值。请注意,其含义与contrastThreshold不同,即edgeThreshold越大,滤除的特征越少(保留的特征越多)。
返回值:
- sift:实例化一个sift特征检测器。
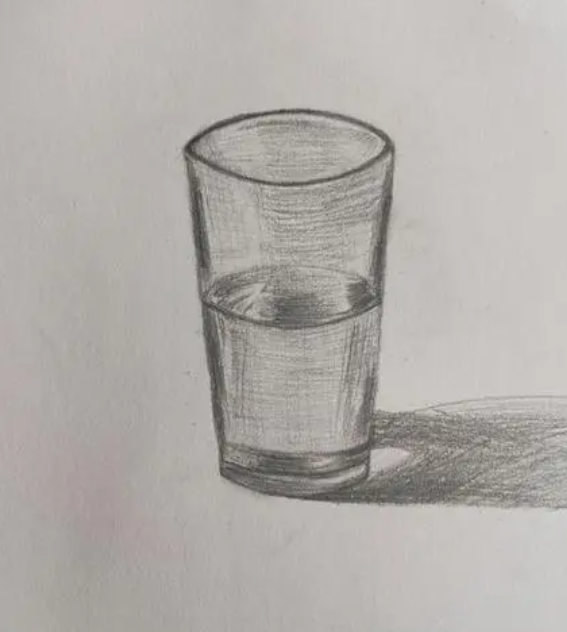
示例:对图像检测DoG特征并提取SIFT描述符
实验原图:
import cv2
import numpy as npimg = cv2.imread('images\\sumian.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)sift = cv2.xfeatures2d.SIFT_create()
keypoints, descriptor = sift.detectAndCompute(gray, None)img = cv2.drawKeypoints(image= img, outImage= img, keypoints= keypoints, flags= cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS, color= (0, 0, 255))cv2.imshow('sift', img)
cv2.waitKey()
cv2.destroyAllWindows()发现是,如果你沿用之前的代码即
descriptor = cv2.xfeatures2d.SIFT_create()
会出现一个warning,但不影响结果。
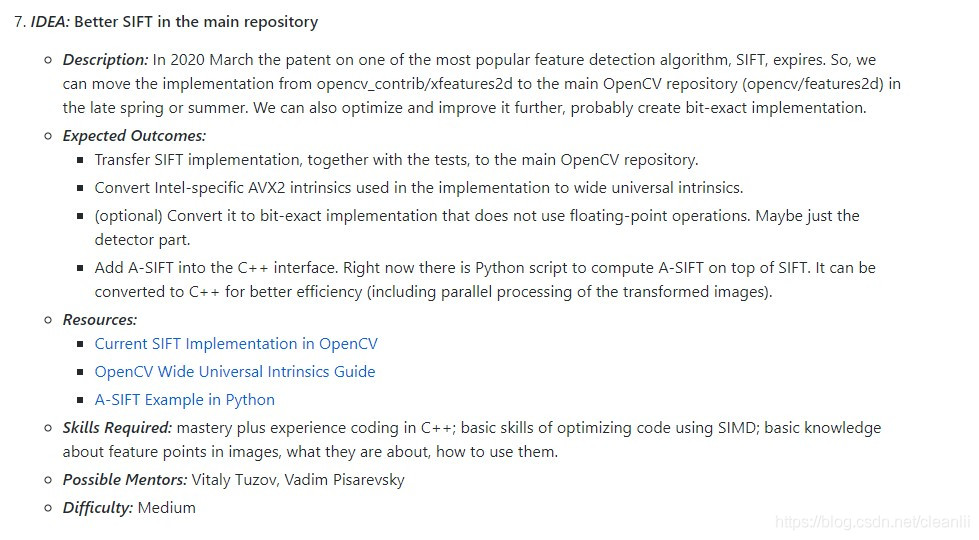
[ WARN:0@0.037] global shadow_sift.hpp:15 cv::xfeatures2d::SIFT_create DEPRECATED: cv.xfeatures2d.SIFT_create() is deprecated due SIFT tranfer to the main repository. https://github.com/opencv/opencv/issues/16736
这是因为新版本的SIFT可以直接引用,不再需要安装contrib包,即
descriptor = cv2.SIFT_create()
官方公告可参见 OpenCV Google Summer of Code 2020
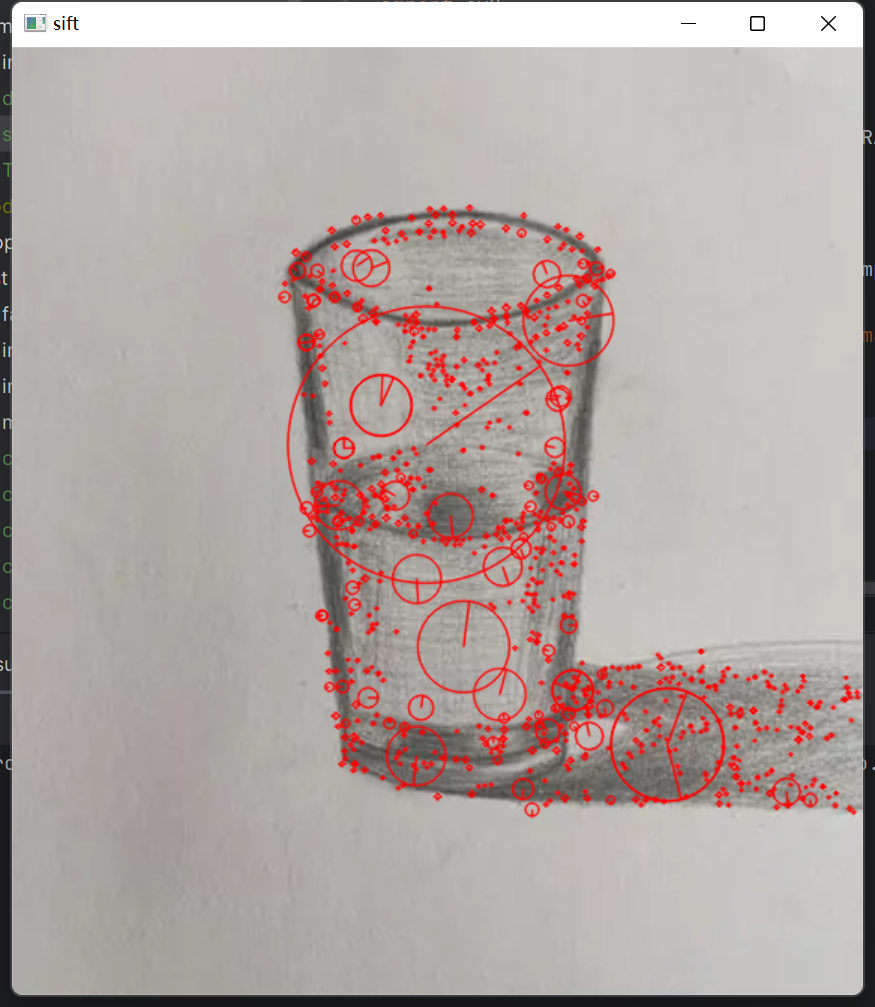
新代码如下:
import cv2img = cv2.imread('images\\sumiao.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)#sift = cv2.xfeatures2d.SIFT_create()
sift = cv2.SIFT_create()
keypoints, descriptor = sift.detectAndCompute(gray, None)img = cv2.drawKeypoints(image= img, outImage= img, keypoints= keypoints, flags= cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS, color= (0, 0, 255))cv2.imshow('sift', img)
cv2.waitKey()
cv2.destroyAllWindows()
运行效果:
相关文章:
opencv 进阶15-检测DoG特征并提取SIFT描述符cv2.SIFT_create()
前面我们已经了解了Harris函数来进行角点检测,因为角点的特性,这些角点在图像旋转的时候也可以被检测到。但是,如果我们放大或缩小图像时,就可能会丢失图像的某些部分,甚至有可能增加角点的质量。这种损失的现象需要一…...

ES5 的构造函数和 ES6 的类有什么区别
文章目录 语法不同方法定义方式不同继承方式不同类内部的this指向不同静态成员定义方式不同访问器属性类的类型检查 在JavaScript中,类和构造函数都被用来创建对象,接下来会从以下几点说说两者的区别: 语法不同 构造函数使用函数来定义类使用…...
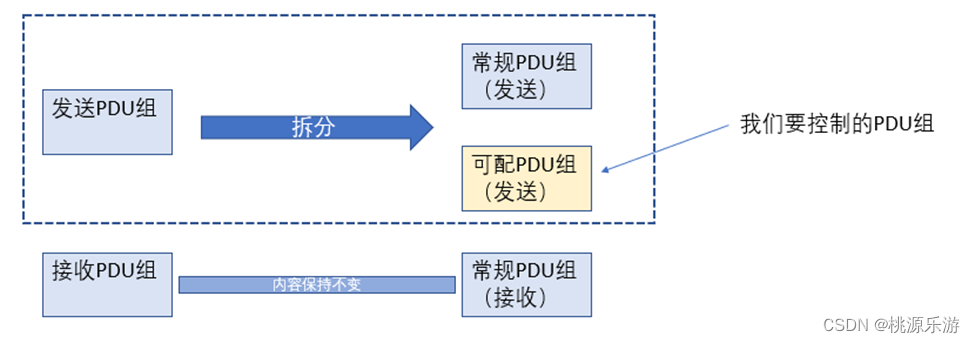
AUTOSAR配置与实践(配置篇) 如何条件控制PDU外发
AUTOSAR配置与实践(配置篇)如何条件控制PDU外发 一、需求1.1 需求简要分析1.2 需求进一步分析二、流程实现和具体配置一、需求 需要针对特定的PDU(外发)进行条件控制,这里要通过不同配置字进行PDU是否外发的控制 1.1 需求简要分析 正常PDU分组时分为两组,接收报文组和…...

2023年湖北中级工程师职称申报专业有哪些?甘建二告诉你
中级职称职称申报专业:环境工程、 土木建筑、土建结构、土建监理、土木工程、岩石工程、岩土、土岩方、风景园林、园艺、园林、园林建筑、园林工程、园林绿化、古建筑园林、工民建、工民建安装、建筑、建筑管理、建筑工程、建筑工程管理、建筑施工、建筑设计、建筑装…...
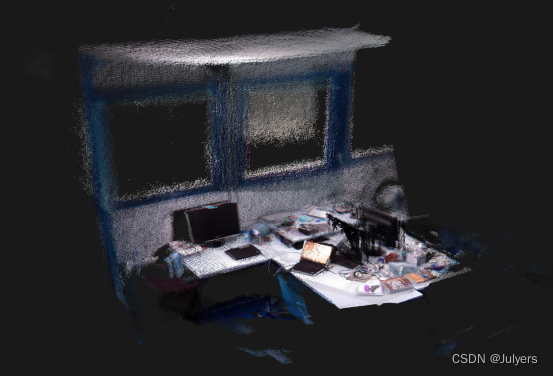
记录:ubuntu20.04+ORB_SLAM2_with_pointcloud_map+ROS noetic
由于相机实时在线运行需要ROS,但Ubuntu22.04只支持ROS2,于是重装Ubuntu20.04。上一篇文章跑通的是官方版本的ORB_SLAM2,不支持点云显示。高翔修改版本支持RGB-D相机的点云显示功能。 高翔修改版本ORB_SLAM2:https://github.com/ga…...

文心问数Sugar Bot :大模型+BI,多轮会话自动生成可视化图表与数据结论
Sugar BI 的文心问数功能是基于大语言模型实现的,支持您使用自然语言,通过多轮会话的方式,获取实时数据的图表展现,也可以自动为您总结与图表相关的业务结论。 文心问数功能邀测中,欢迎CSDN的用户前来报名:…...

21、WEB漏洞-文件上传之后端黑白名单绕过
目录 前言验证/绕过 前言 关于文件上传的漏洞,目前在网上的常见验证是验证三个方面: 后缀名,文件类型,文件头,其中这个文件头是属于文件内容的一个验证 后缀名:黑名单,白名单 文件类型…...

windows的django项目部署到linux的docker上
编辑dockerfile文件,可以自行寻找相关教程 创建镜像 docker bulid -t imagename:tag .查看镜像 docker images 如果想自己先试一下,那就需要运行容器 docker run -it -d -p 8000:8000 --name volume_name imagename:tag 查看容器 docker ps -a 进…...

【力扣】70. 爬楼梯 <动态规划>
【力扣】70. 爬楼梯 假设你正在爬楼梯。需要 n 阶你才能到达楼顶。每次你可以爬 1 或 2 个台阶。你有多少种不同的方法可以爬到楼顶呢? 示例 1: 输入:n 2 输出:2 解释:有两种方法可以爬到楼顶。 1. 1 阶 1 阶 2. …...
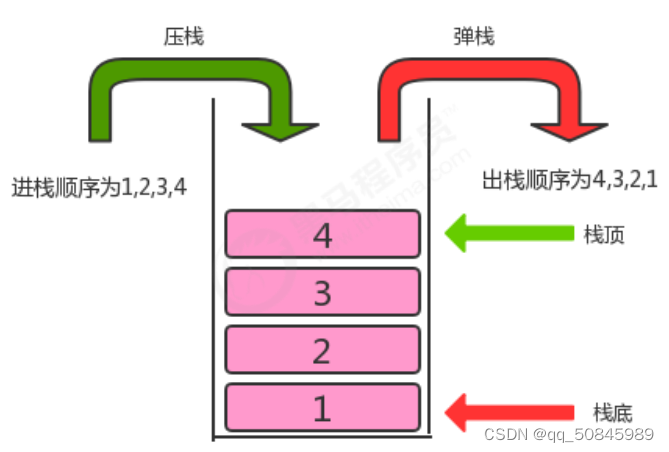
数据结构(3)
线性表是多个具有相同特征的数据的有限序列。 前驱元素:A在B前面,称A为B的前驱元素。 后继元素:B在A后面,称B为A的后继元素。 线性表特征: 1.一个元素没有前驱元素,就是头结点; 2.最后一个…...

深入浅出Pytorch函数——torch.nn.init.xavier_uniform_
分类目录:《深入浅出Pytorch函数》总目录 相关文章: 深入浅出Pytorch函数——torch.nn.init.calculate_gain 深入浅出Pytorch函数——torch.nn.init.uniform_ 深入浅出Pytorch函数——torch.nn.init.normal_ 深入浅出Pytorch函数——torch.nn.init.c…...
工程师)
优橙内推安徽专场——5G网络优化(中高级)工程师
可加入就业QQ群:801549240 联系老师内推简历投递邮箱:hrictyc.com 内推公司1:浙江省邮电工程建设有限公司 内推公司2:北京宜通华瑞科技有限公司 内推公司3:浙江明讯网络技术有限公司 浙江省邮电工程建设有限公司 …...
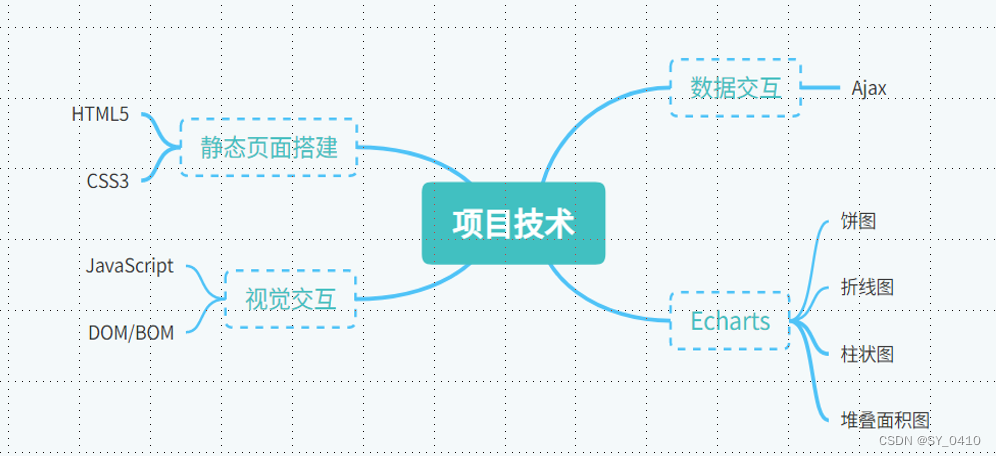
2023年计算机设计大赛国三 数据可视化 (源码可分享)
2023年暑假参加了全国大学生计算机设计大赛,并获得了国家三等奖(国赛答辩出了点小插曲)。在此分享和记录本次比赛的经验。 目录 一、作品简介二、作品效果图三、设计思路四、项目特色 一、作品简介 本项目实现对农产品近期发展、电商销售、灾…...

工业生产全面感知!工业感知云来了
面向工业企业数字化转型需求,天翼物联基于感知云平台创新能力和5G工业物联数采能力,为客户提供工业感知云服务,包括工业泛协议接入、感知云工业超轻数采平台、工业感知数据治理、工业数据看板四大服务,构建工业感知神经系统新型数…...

Lnton羚通关于Optimization在【PyTorch】中的基础知识
OPTIMIZING MODEL PARAMETERS (模型参数优化) 现在我们有了模型和数据,是时候通过优化数据上的参数来训练了,验证和测试我们的模型。训练一个模型是一个迭代的过程,在每次迭代中,模型会对输出进行猜测&…...

冒泡排序算法
//version 1 void bubblesort(vector<int>& nums){int n=nums.size();for(int i...
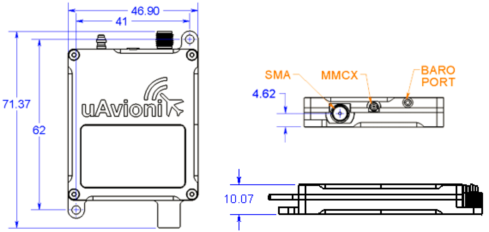
无人机航管应答机 ping200XR
产品概述 ping200XR是一个完整的系统,旨在满足航管应答器和自动相关监视广播(ADS-B)的要求,在管制空域操作无人航空系统(UAS)。该系统完全可配置为模式A,模式C,模式S转发器和扩展ADS-B发射机的任何组合。ping200XR包括一个精度超…...

oracle归档日志满了导致启动不起来解决
oracle启动不起来解决 原因:闪回归档区的空间满了 [oraclepre-oracle ~]$ sqlplus / as sysdbaSQL*Plus: Release 11.2.0.4.0 Production on Tue Aug 22 14:48:50 2023Copyright (c) 1982, 2013, Oracle. All rights reserved.Connected to: Oracle Database 11g…...

高等数学:线性代数-第二章
文章目录 第2章 矩阵及其运算2.1 线性方程组和矩阵2.2 矩阵的运算2.3 逆矩阵2.4 Cramer法则 第2章 矩阵及其运算 2.1 线性方程组和矩阵 n \bm{n} n 元线性方程组 设有 n 个未知数 m 个方程的线性方程组 { a 11 x 1 a 12 x 2 ⋯ a 1 n x n b 1 a 21 x 1 a 22 x 2 ⋯ a …...

星戈瑞分析FITC-PEG-Alkyne的荧光特性和光谱特性
欢迎来到星戈瑞荧光stargraydye!小编带您盘点: FITC-PEG-Alkyne的荧光特性和光谱特性是对其荧光性能进行分析的方面。以下是FITC-PEG-Alkyne的一些常见荧光特性和光谱特性: **1. 荧光激发波长:**FITC-PEG-Alkyne的荧光激发波长通…...

Vue3+Cesium实战避坑指南:从环境配置到坐标转换的常见问题解析
1. Vue3Cesium环境配置避坑指南 第一次在Vue3项目中集成Cesium时,我踩了不少坑。记得当时光是让地球显示出来就折腾了大半天,各种报错让人抓狂。现在回想起来,其实很多问题都有规律可循。 1.1 正确安装Cesium依赖 新手最容易犯的错误就是直接…...

安装The Agency后Opencode启动报错:Failed to parse YAML frontmatter: incomplete explicit mapping pair
报错:opencode Failed to parse frontmatter in /home/skywalk/opencodework/.opencode/agent/zk-steward.md: Failed to parse YAML frontmatter: incomplete explicit mapping pair; a key node is missed; or followed by a non-tabulated empty line at line 3,…...

3分钟搞定!B站视频下载神器让你轻松保存大会员4K高清视频 [特殊字符]
3分钟搞定!B站视频下载神器让你轻松保存大会员4K高清视频 🚀 【免费下载链接】bilibili-downloader B站视频下载,支持下载大会员清晰度4K,持续更新中 项目地址: https://gitcode.com/gh_mirrors/bil/bilibili-downloader 还…...
Matlab程序)
改进无人机三维路径规划(蜣螂优化算法)Matlab程序
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。👇 关注我领取海量matlab电子书和数学建模资料🍊个人信条:格物致知,完整Matl…...

模力方舟:国内AI开发者的全流程加速平台
模力方舟:国内AI开发者的全流程加速平台 在AI技术快速发展的当下,如何让开发者更高效地将创意转化为实际应用成为行业关键命题。由Gitee推出的模力方舟(MoArk)平台,通过整合模型体验、微调训练、推理部署到应用变现的全流程能力,为…...

如何使用WiFiManager打造智能零售网络:从自助结账到智能货架的无缝配置方案
如何使用WiFiManager打造智能零售网络:从自助结账到智能货架的无缝配置方案 【免费下载链接】WiFiManager ESP8266 WiFi Connection manager with web captive portal 项目地址: https://gitcode.com/gh_mirrors/wi/WiFiManager 在现代零售环境中,…...
)
2026年初中中考英语大纲词汇表1600个电子版PDF(含单词音频和默写本)
2026年初中英语大纲词汇表1600词 核心内容: 1600个初中英语考纲词汇完整列表(按新课标要求整理)配套默写训练本(含汉译英英译汉双向练习)专业录制的单词发音音频包 资源特性: 电子版采用可打印PDF格式支…...

一文读懂:智慧人才管理系统的核心功能与企业应用价值
企业人力资源管理正从传统事务性操作迈向智能化新阶段,智慧人才管理系统作为核心支撑工具,正逐步重构人才管理模式。 很多企业面临数据孤岛、流程繁琐、决策依赖经验等痛点,智慧人才管理系统通过一体化整合与 AI 技术应用,实现人才…...
)
Windows 11 + Python 3.10 下,用智谱GLM-4-Flash API零成本跑通DB-GPT(保姆级避坑指南)
Windows 11 Python 3.10 下零成本跑通DB-GPT全流程指南 最近发现不少朋友对DB-GPT这个开源项目很感兴趣,但被复杂的部署流程和硬件要求劝退。作为过来人,我完全理解这种困扰——去年第一次尝试时,光是处理依赖冲突就花了整整两天。不过现在…...

大量频繁发起连接导致瀚高数据库进程被信号6杀死
文章目录环境症状问题原因解决方案环境 系统平台:银河麒麟 (龙芯) 版本:4.5.1 症状 数据库版本:瀚高安全版V4.5.1.2 介质 hgdb-see-4.5.1.2-ee53424.loongarch64.rpm 信号6的报错信息: 2025-04-18 08…...