计算机视觉 -- 图像分割
文章目录
- 1. 图像分割
- 2. FCN
- 2.1 语义分割– FCN (Fully Convolutional Networks)
- 2.2 FCN--deconv
- 2.3 Unpool
- 2.4 拓展–DeconvNet
- 3. 实例分割
- 3.1 实例分割--Mask R-CNN
- 3.2 Mask R-CNN
- 3.3 Faster R-CNN与 Mask R-CNN
- 3.4 Mask R-CNN:Resnet101
- 3.5 特征金字塔-Feature Pyramid Networks(FPN)
- 3.6 Mask R-CNN:FPN
- 3.7 Faster-RCNN:Roi pooling
- 3.8 Mask R-CNN:Roi-Align
- 3.9 Mask R-CNN:分割掩膜
- 3.10 Mask R-CNN—总结
- 3.11 Mask R-CNN:COCO数据集
- 4. 视频结构化
- 5. 代码示例
- 5.1 nets
- 5.2 mask_rcnn.py
- 5.3 train.py
- 5.4 predict.py
1. 图像分割
引入问题:
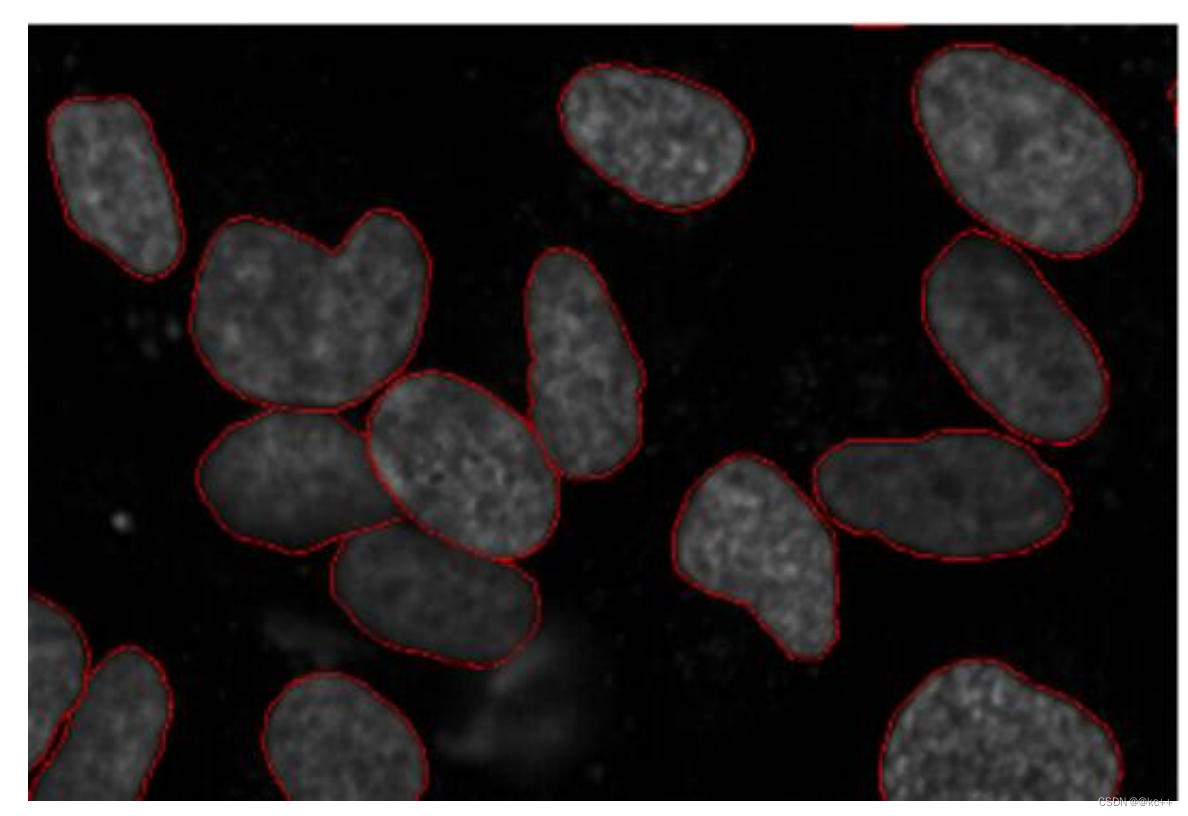
在自动驾驶系统中,如果用之前的检测网络(例如Faster-Rcnn),试想,倘若前方有一处急转弯,系统只在道路上给出一个矩形标识,这样一来车辆很有可能判断不出是该避让还是径直上前,车祸一触即发。因此,对新技术的诉求应运而生,该技术须能识别具体路况,以指引车辆顺利过弯。

图像分割即为图片的每个对象创建一个像素级的掩膜,该技术可使大家对图像中的对象有更深入的了解。
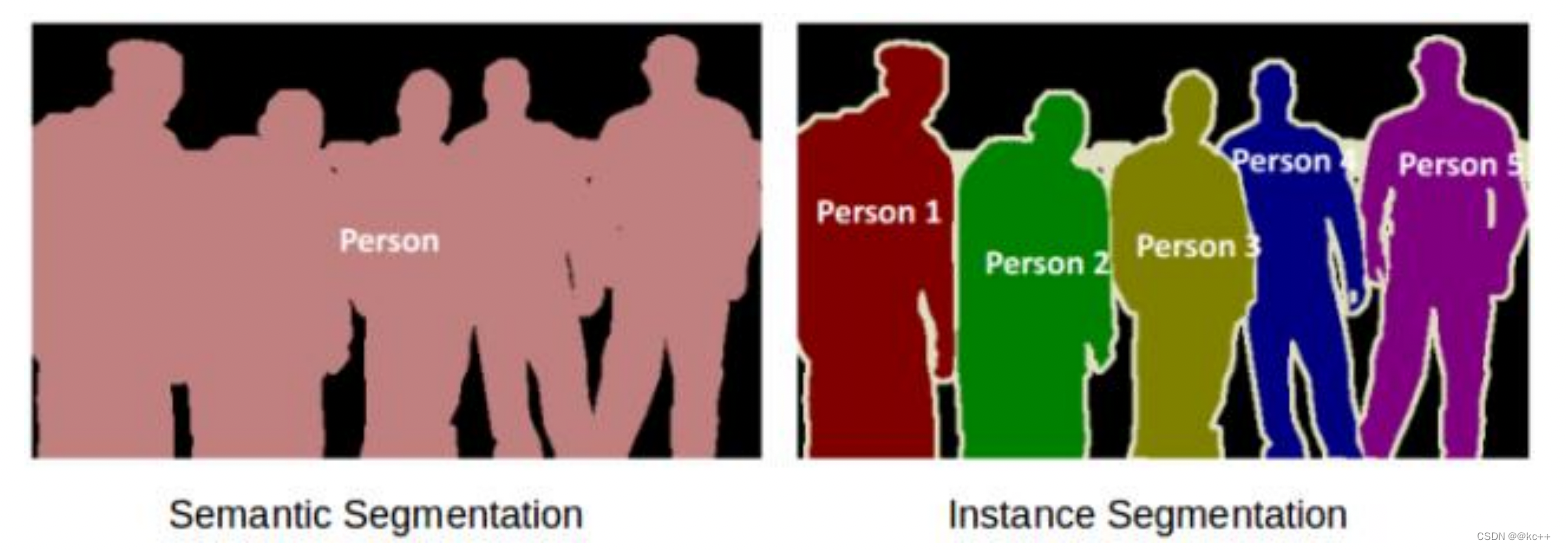
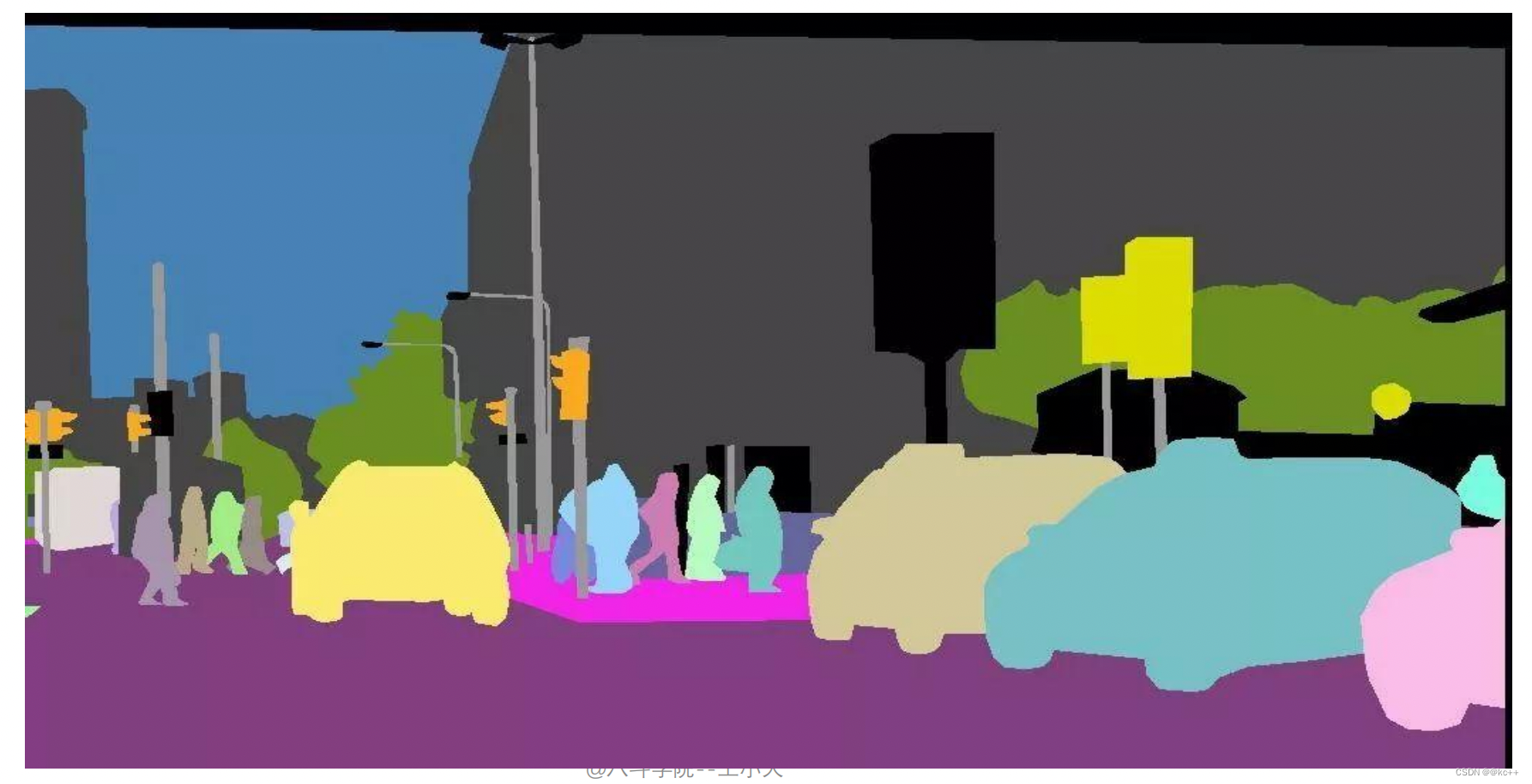
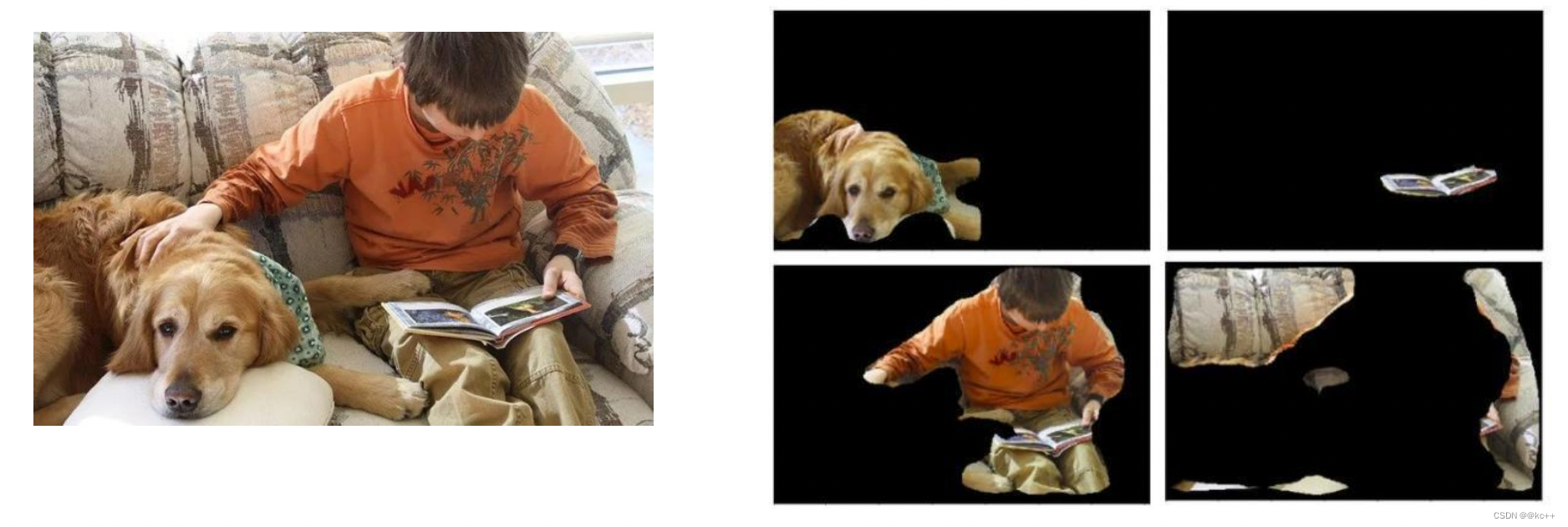
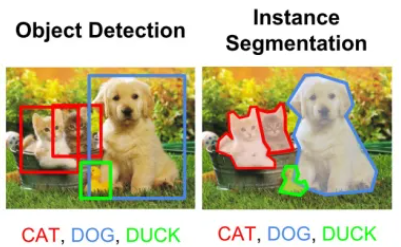
图像分割可分为两种:语义分割与实例分割。
- 左图五个对象均为人,因此语义分割会将这五个对象视为一个整体。
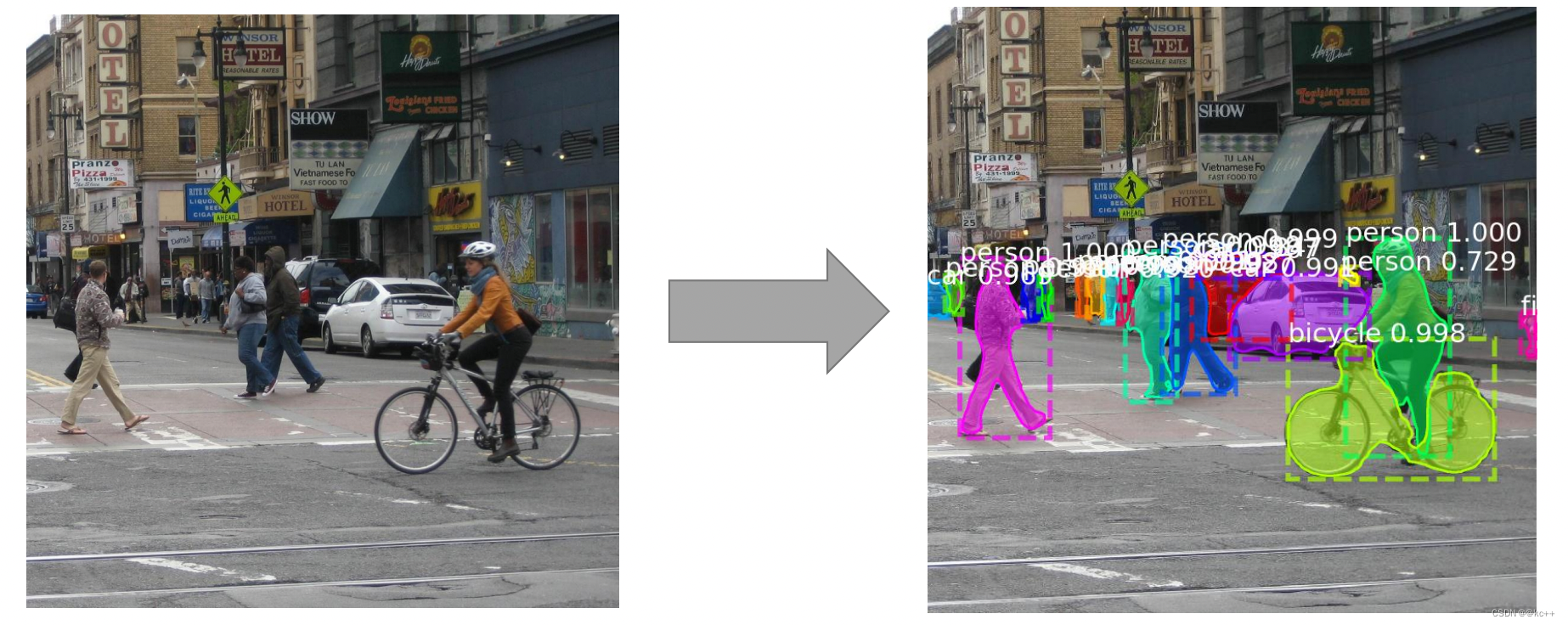
- 右图同样也有五个对象(亦均为人),但同一类别的不同对象在此被视为不同的实例,这就是实例分割。
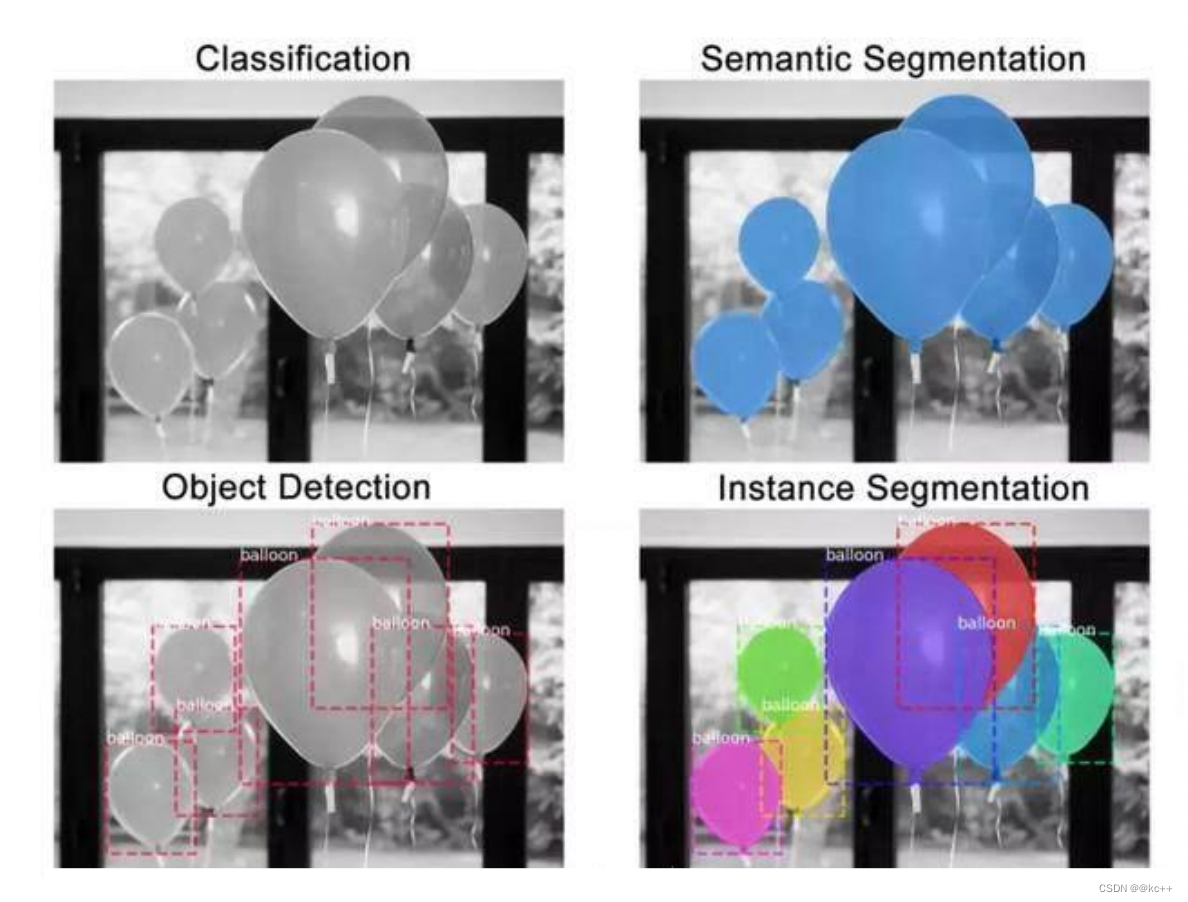
图像分类,语义分割,目标检测,实例分割
2. FCN
2.1 语义分割– FCN (Fully Convolutional Networks)
全卷积神经网络,顾名思义,该网络中没有全连接层,都是一些卷卷积的结构
FCN最主要的一个用法就是用于语义分割
我们分类使用的网络通常会在最后连接几层全连接层,它会将原来二维的矩阵(图片)压扁成一维的,从而丢失了空间信息,最后训练输出一个标量,这就是我们的分类标签。
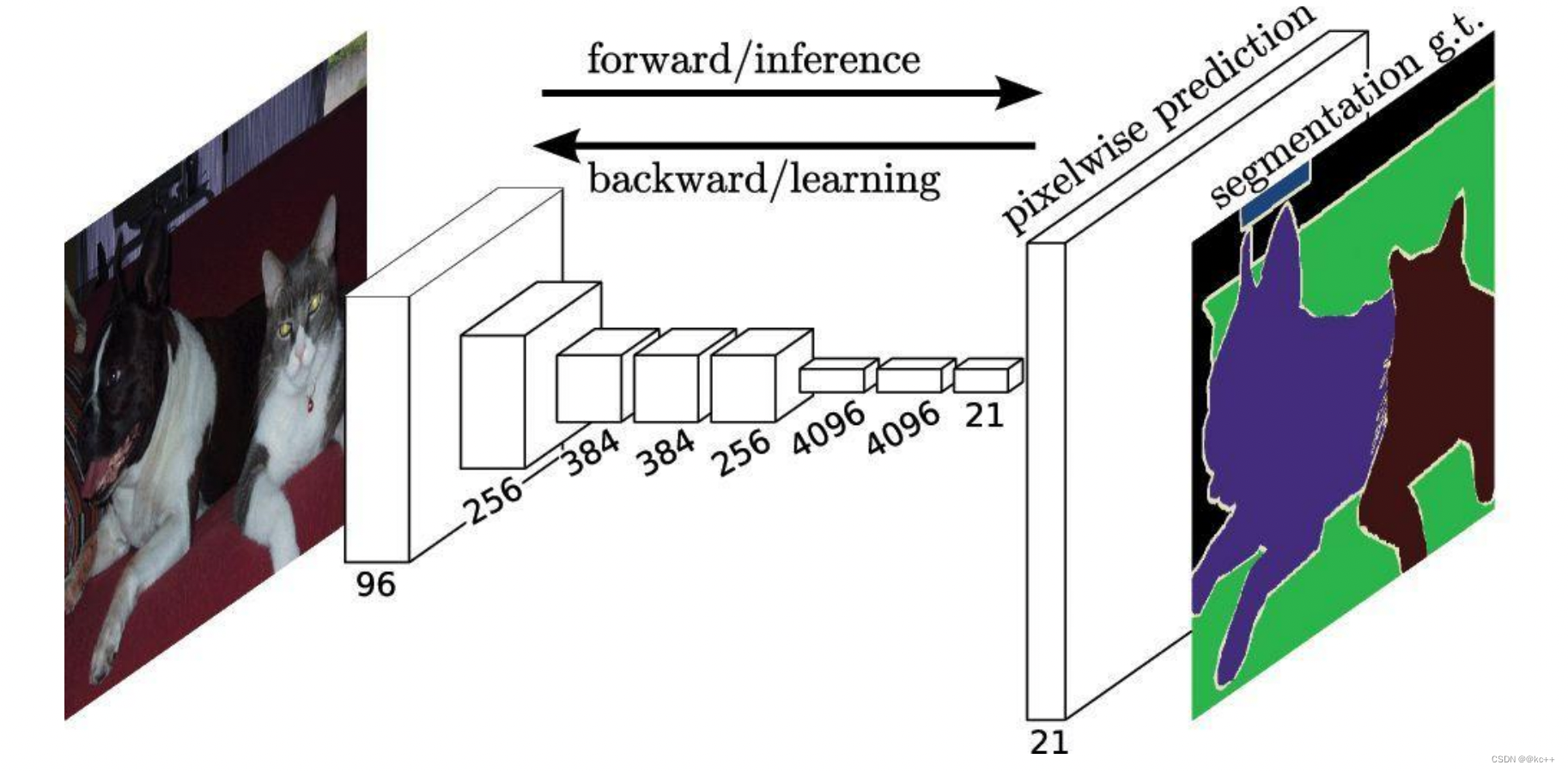
FCN网络和一般的网络的最大不同是,FCN产生的输出和输入的维度保持一致,即改变原本的CNN网络末端的全连接层,将其调整为卷积层,这样原本的分类网络最终输出一个热度图类型的图像。
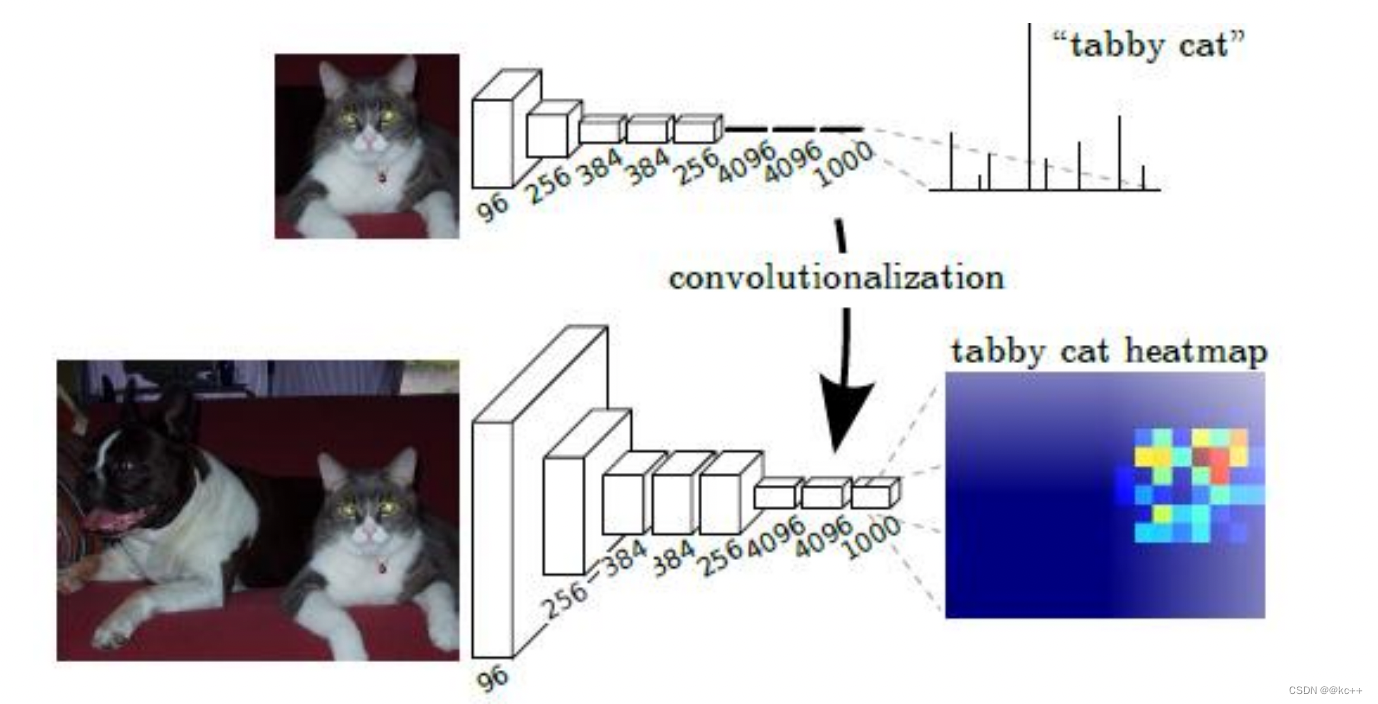
一句话概括原理:
FCN将传统卷积网络后面的全连接层换成了卷积层,这样网络输出不再是类别而是heatmap;同时为了解决因为卷积和池化对图像尺寸的影响,提出使用上采样的方式恢复尺寸。
核心思想:
- 不含全连接层(fc)的全卷积(fully conv)网络。可适应任意尺寸输入。
- 增大数据尺寸的反卷积(deconv)层。能够输出精细的结果。
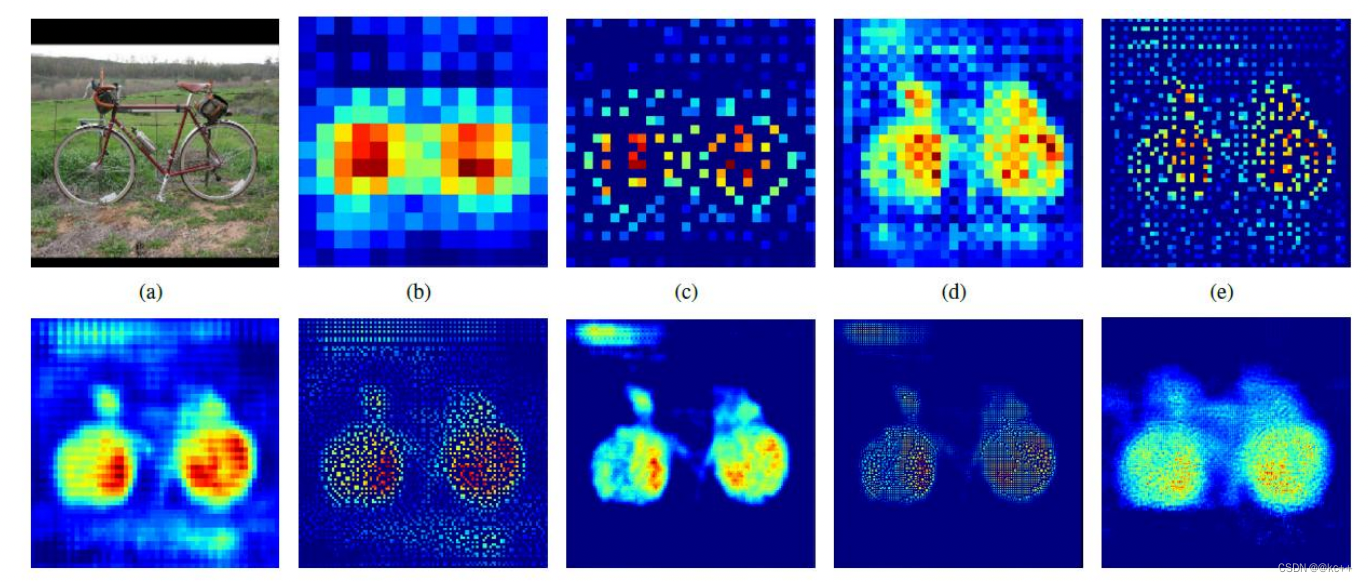
FCN对图像进行像素级的分类,从而解决了语义级别的图像分割(semantic segmentation)问题。
FCN可以接受任意尺寸的输入图像,采用反卷积层对最后一个卷积层的feature map进行上采样, 使它恢复到输入图像相同的尺寸,从而可以对每个像素都产生了一个预测, 同时保留了原始输入图像中的空间信息, 最后在上采样的特征图上进行逐像素分类。
最后逐个像素计算softmax分类的损失, 相当于每一个像素对应一个训练样本。
对全卷积网络的末端再进行upsampling(上采样),即可得到和原图大小一样的输出,这就是热度图了。这里上采样采用了deconvolutional(反卷积)的方法。
反卷积/转置卷积:它并不是正向卷积的完全逆过程。反卷积是一种特殊的正向卷积,先按照一定的比例通过补0来扩大输入图像的尺寸,接着旋转卷积核,再进行正向卷积。
大家可能对于反卷积的认识有一个误区,以为通过反卷积就可以获取到经过卷积之前的图片, 实际上通过反卷积操作并不能还原出卷积之前的图片, 只能还原出卷积之前图片的尺寸。
卷积和反卷积,并没有什么关系,操作的过程 也都是不可逆的。
2.2 FCN–deconv
反卷积用在什么地方?
- 反卷积/转置卷积在语义分割领域应用很广,如果说pooling层用于特征降维,那么在多个pooling层后,就需要用转置卷积来进行分辨率的恢复。
- 如果up-sampling采用双线性插值进行分辨率的提升,这种提升是非学习的。采用反卷积来完成上采样的工作,就可以通过学习的方式得到更高的精度
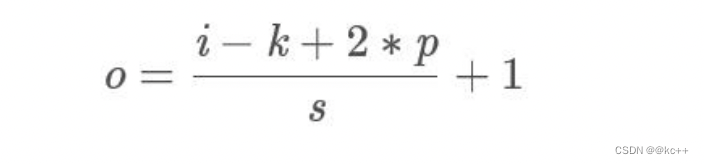
反卷积具体步骤:
- 将上一层的卷积核反转(上下左右方向进行反转)。
- 将上一层卷积的结果作为输入,做补0扩充操作,即往每一个元素后面补0。这一步是根据步长来的,对于每个元素沿着步长方向补(步长-1)个0。例如,步长为1就不用补0了。
- 在扩充后的输入基础上再对整体补0。以原始输入的shape作为输出shape,按照卷积padding规则,计算pading的补0的位置及个数,得到补0的位置及个数。
- 将补0后的卷积结果作为真正的输入,反转后的卷积核为filter,进行步长为1的卷积操作。
注意:计算padding按规则补0时,统一按照padding=‘SAME’、步长为1*1的方式来计算
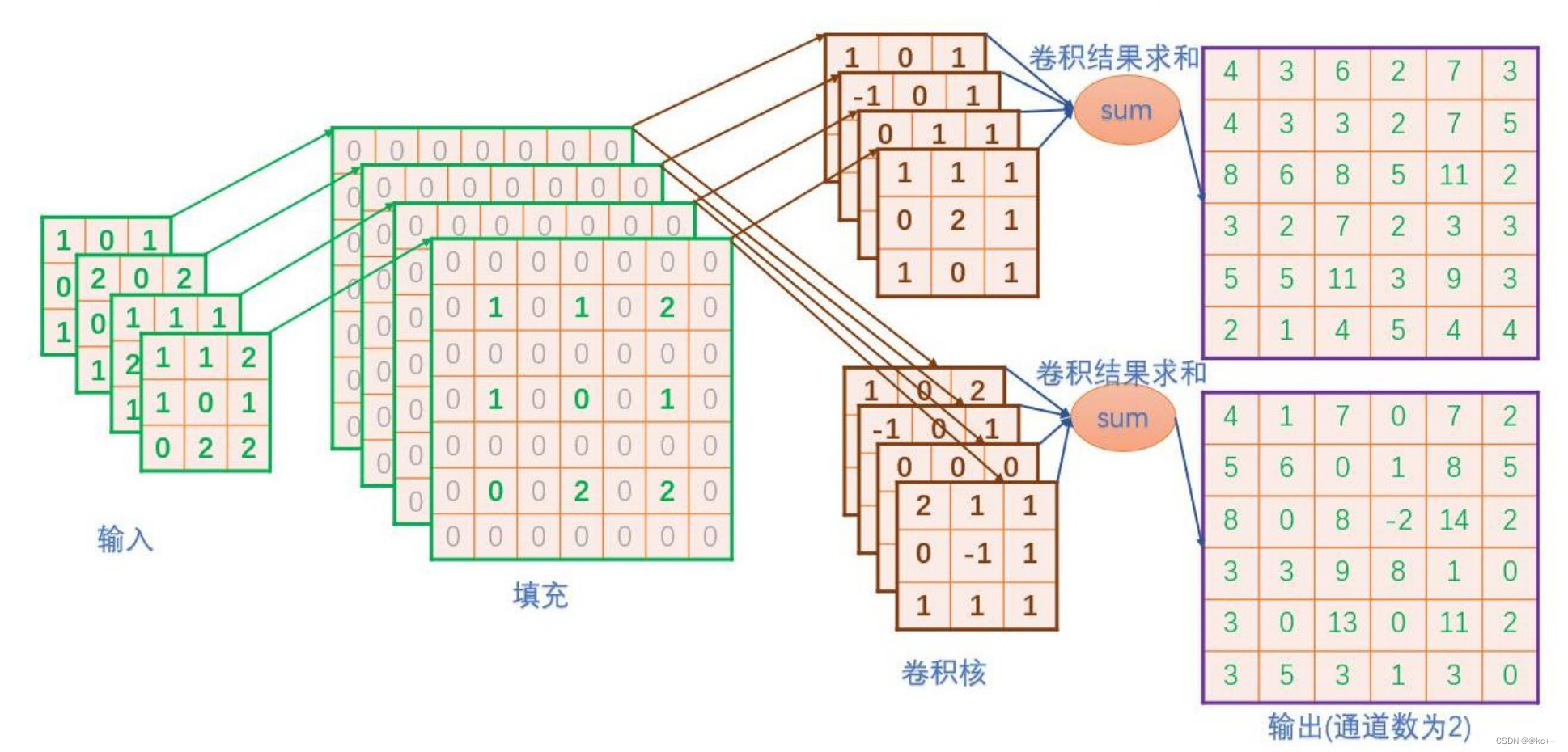
卷积:
反卷积:

反卷积的缺点:
- 卷积矩阵是稀疏的(有大量的0),因此大量的信息是无用的;
- 求卷积矩阵的转置矩阵是非常耗费计算资源的。
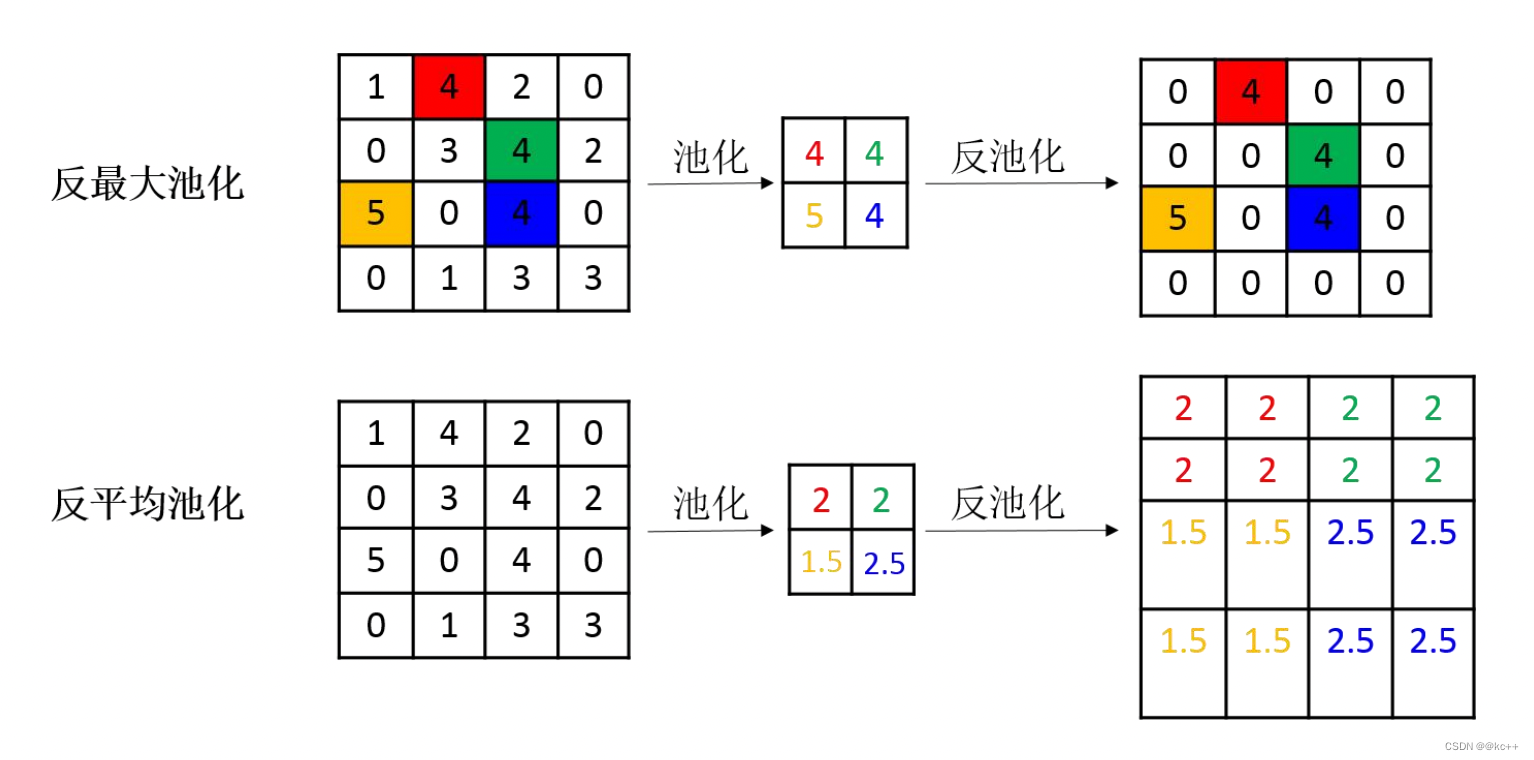
2.3 Unpool
池化操作中最常见的最大池化和平均池化,因此最常见的反池化操作有反最大池化和反平均池化。反最大池化需要记录池化时最大值的位置,反平均池化不需要此过程。
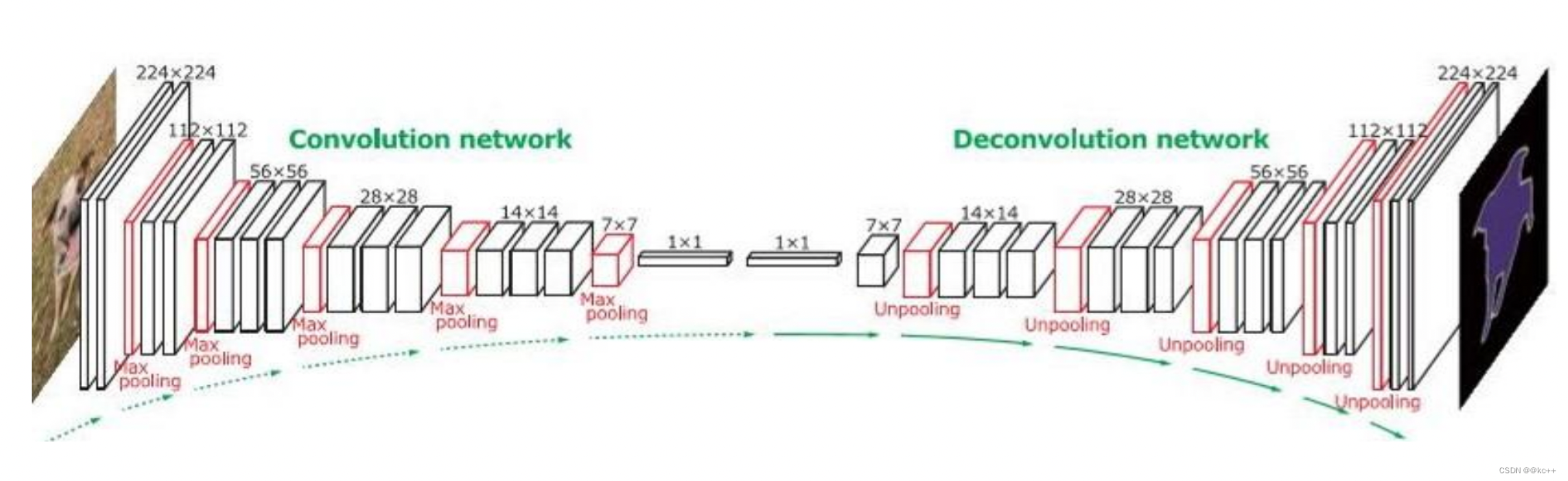
2.4 拓展–DeconvNet
这样的对称结构有种自编码器的感觉在里面,先编码再解码。
3. 实例分割
实例分割(instance segmentation)的难点在于:需要同时检测出目标的位置并且对目标进行分割,所以这就需要融合目标检测(框出目标的位置)以及语义分割(对像素进行分类,分割出目标)方法。
3.1 实例分割–Mask R-CNN
Mask R-CNN可算作是Faster R-CNN的升级版。
Faster R-CNN广泛用于目标检测。对于给定图像,它会给图中每个对象加上类别标签与边界框坐标。
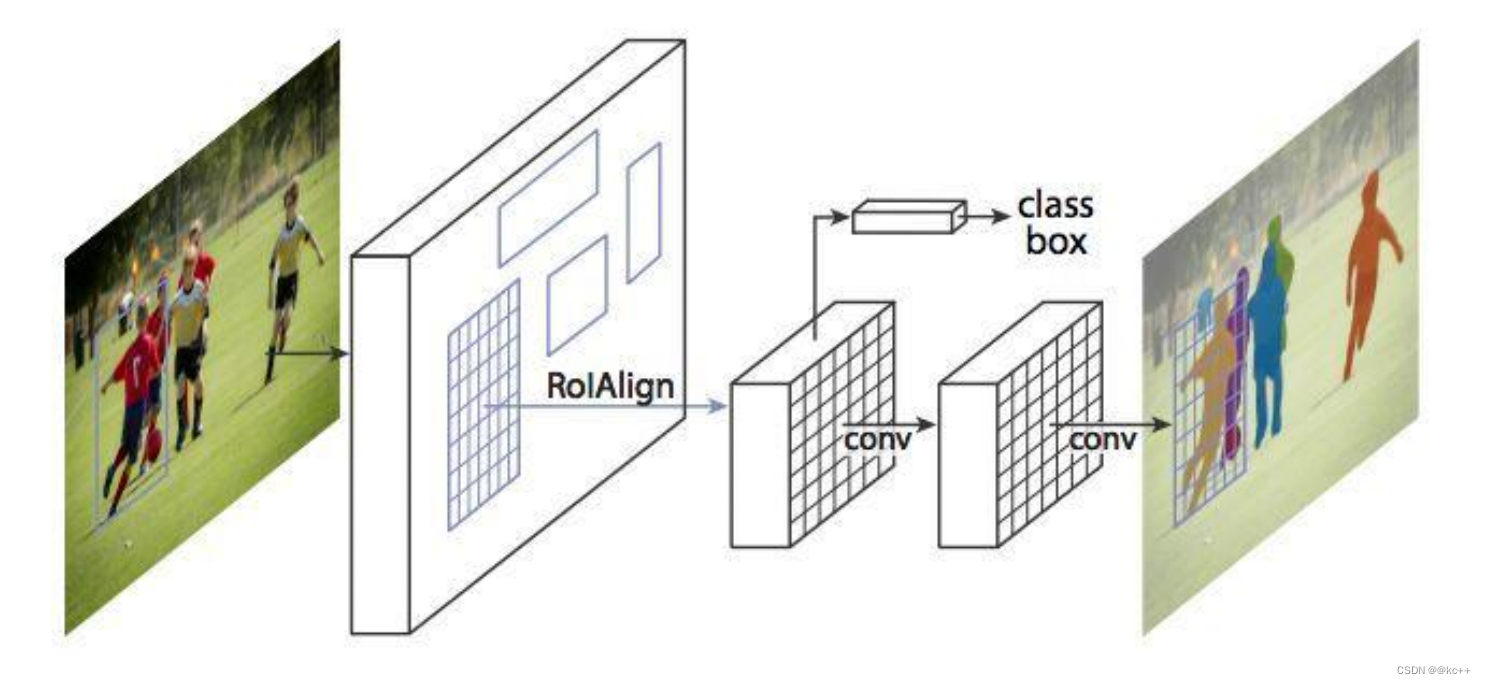
Mask R-CNN框架是以Faster R-CNN为基础而架构的。因此,针对给定图像, Mask R-CNN不仅会给每个对象添加类标签与边界框坐标,还会返回其对象掩膜。
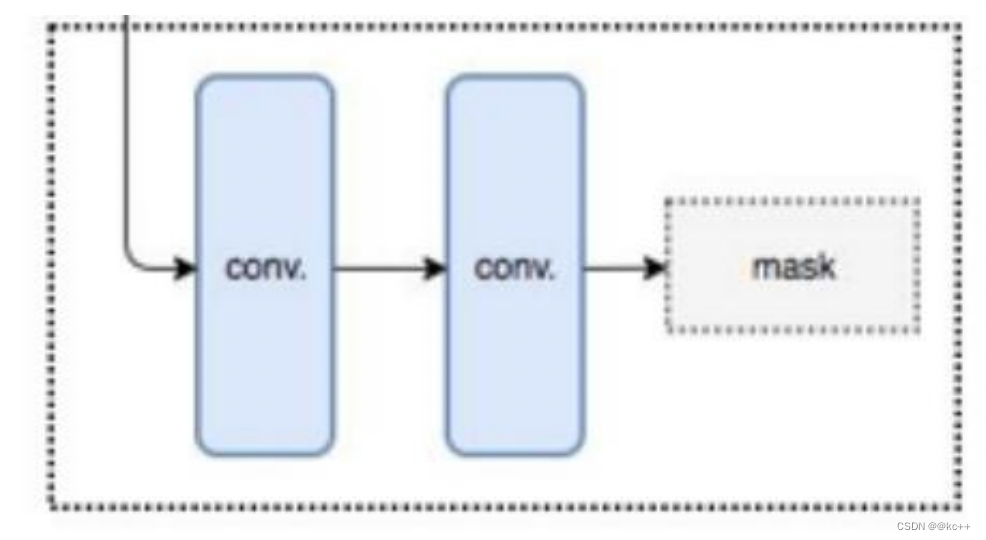
Mask R-CNN的抽象架构:
3.2 Mask R-CNN
Mask R-CNN在进行目标检测的同时进行实例分割,取得了出色的效果
3.3 Faster R-CNN与 Mask R-CNN
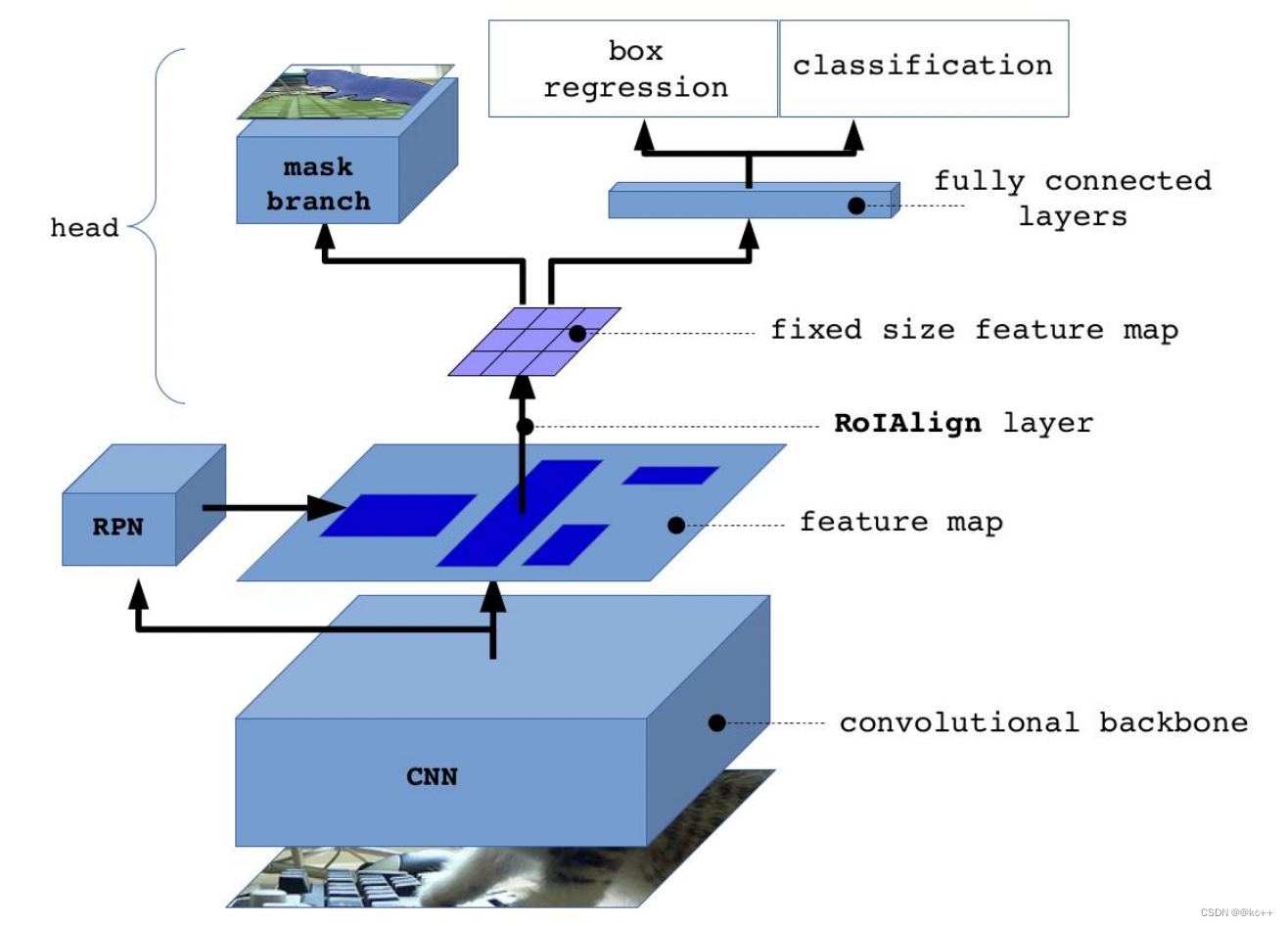
Mask-RCNN 大体框架还是 Faster-RCNN 的框架,可以说在基础特征网络之后又加入了全连接的分割子网,由原来的两个任务(分类+回归)变为了三个任务(分类+回归+分割)。Mask R-CNN 是一个两阶段的框架,第一个阶段扫描图像并生成候选区域(proposals,即有可能包含一个目标的区域),第二阶段分类候选区域并生成边界框和掩码。
与Faster RCNN的区别:
- 使用ResNet网络作为backbone
- 将 Roi Pooling 层替换成了 RoiAlign;
- 添加并列的 Mask 层;
- 引入FPN 和 FCN
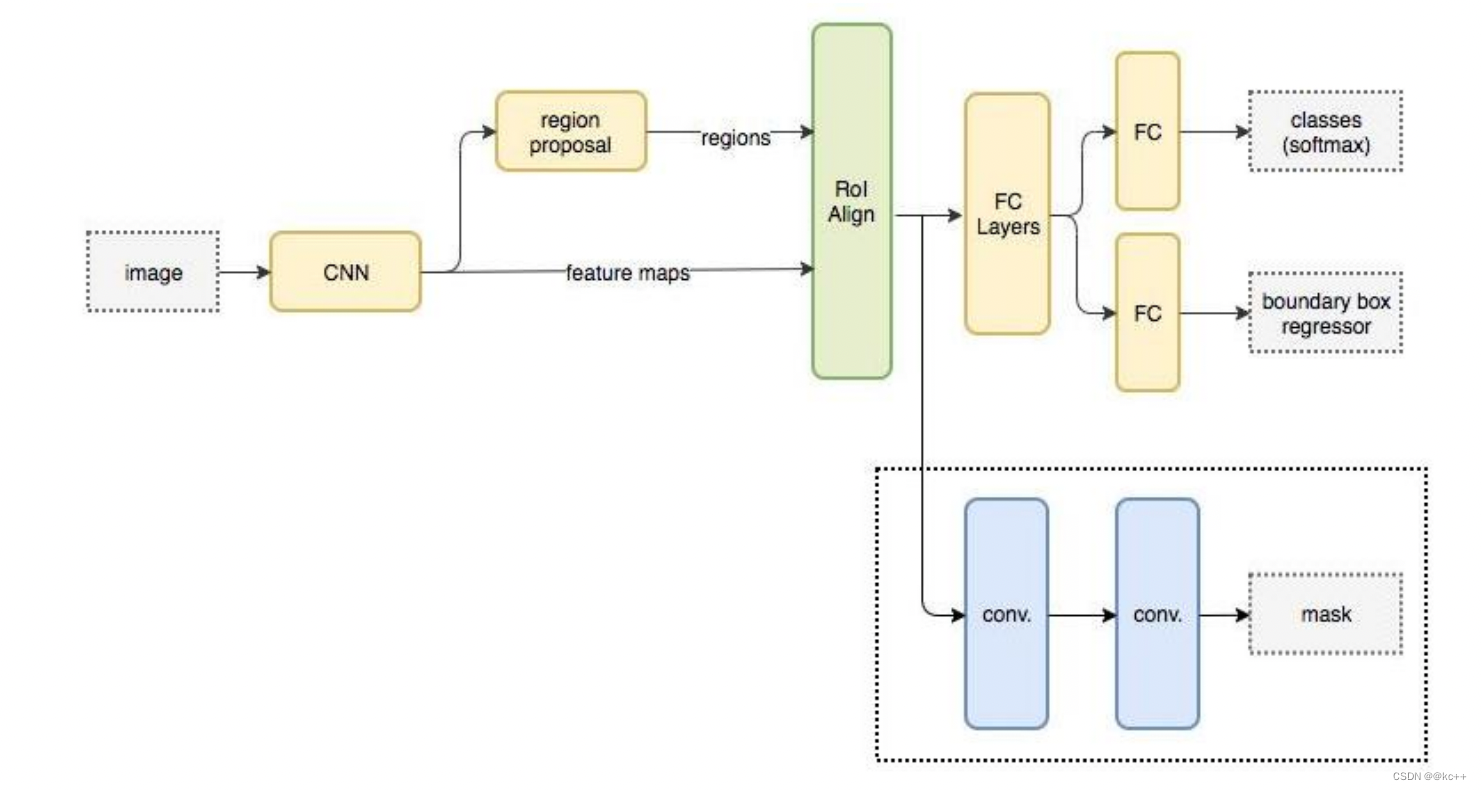
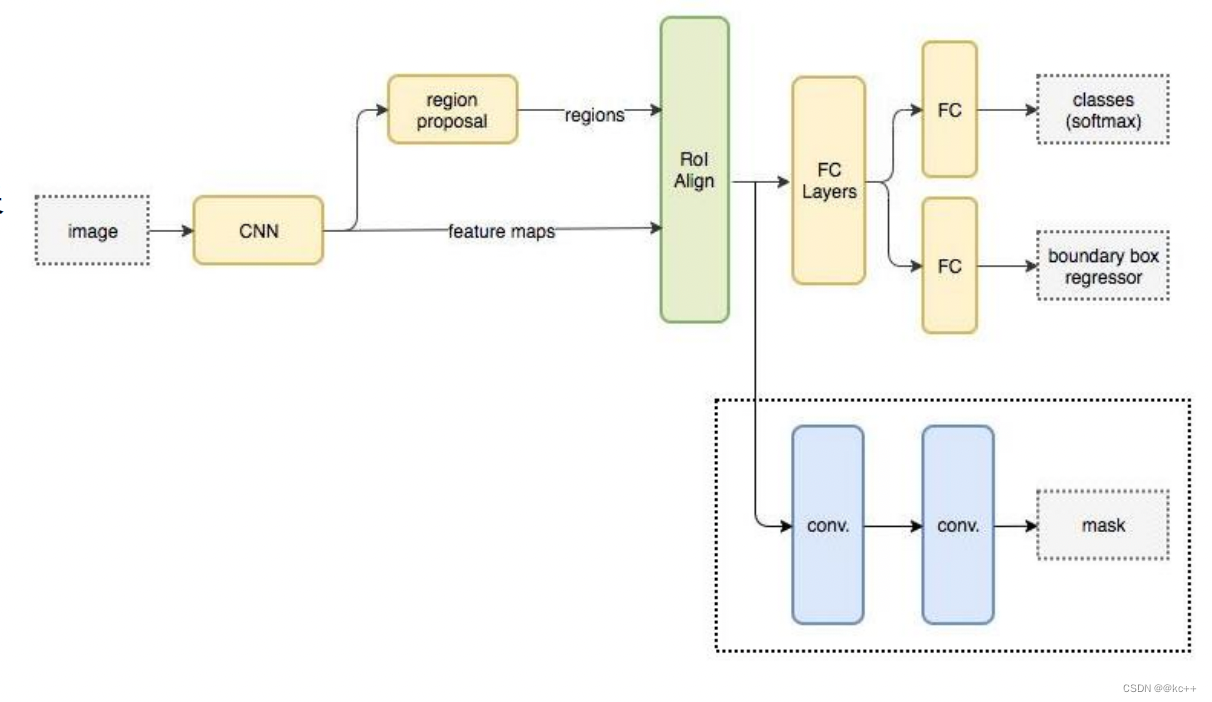
- 输入一幅你想处理的图片,然后进行对应的预处理操作,获得预处理后的图片;
- 将其输入到一个预训练好的神经网络中(ResNet等)获得对应的feature map;
- 对这个feature map中的每一点设定预定个的ROI,从而获得多个候选ROI;
- 将这些候选的ROI送入RPN网络进行二值分类(positive或negative)和BB回归,过滤掉一部分候选的ROI(截止到目前,Mask和Faster完全相同);
- 对这些剩下的ROI进行ROIAlign操作(ROIAlign为Mask R-CNN创新点1,比ROIPooling有长足进步);
- 最后,对这些ROI进行分类(N类别分类)、BB回归和MASK生成(在每一个ROI里面进行FCN操作)(引入FCN生成Mask是创新点2,使得此网络可以进行分割型任务)。
- backbone:Mask-RCNN使用 Resnet101作为主干特征提取网络, 对应着图像中的CNN部分。(当然也可以使用别的CNN网络)
- 在进行特征提取后,利用长宽压缩了两次、三次、四次、五次的特征层来进行特征金字塔结构的构造。
3.4 Mask R-CNN:Resnet101
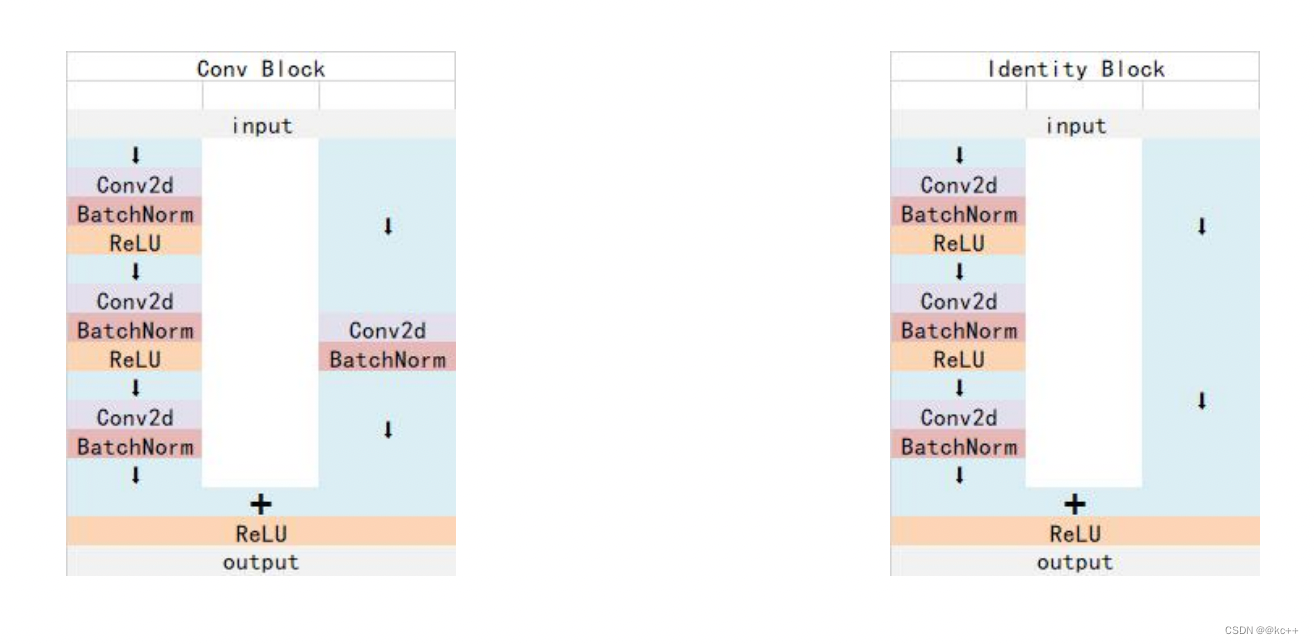
Resnet 中 Conv Block和Identity Block的结构:
其中Conv Block输入和输出的维度是不一样的,所以不能连续串联,它的作用是改变网络的维度;Identity Block输入维度和输出维度相同,可以串联,用于加深网络
3.5 特征金字塔-Feature Pyramid Networks(FPN)
- 目标检测任务和语义分割任务里面常常需要检测小目标。但是当小目标比较小时,可能在原图里面只有几十个像素点。
- 对于深度卷积网络,从一个特征层卷积到另一个特征层,无论步长是1还是2还是更多,卷积核都要遍布整个图片进行卷积,大的目标所占的像素点比小目标多,所以大的目标被经过卷积核的次数远比小的目标多,所以在下一个特征层里,会更多的反应大目标的特点。
- 特别是在步长大于等于2的情况下,大目标的特点更容易得到保留,小目标的特征点容易被跳过。
- 因此,经过很多层的卷积之后,小目标的特点会越来越少。
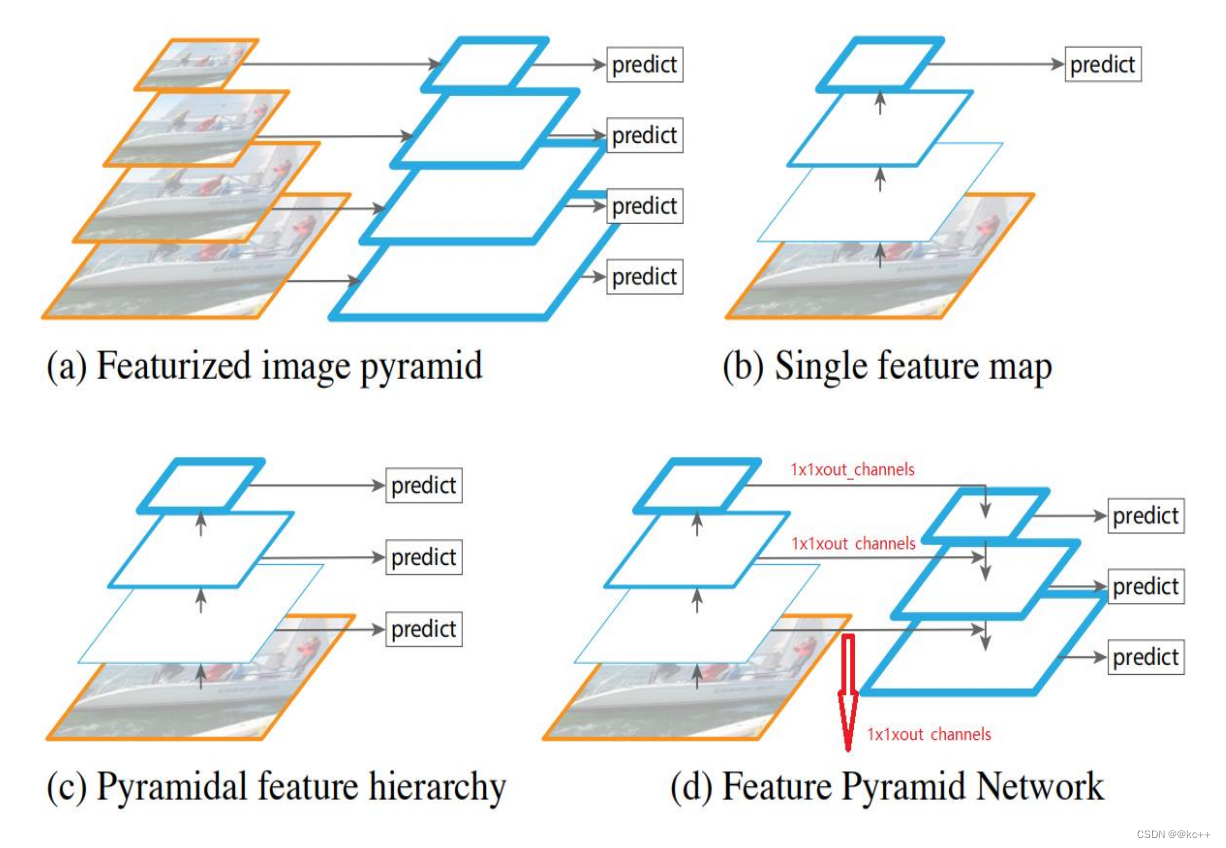
特征图(feature map)用蓝色轮廓表示, 较粗的轮廓表示语义上更强的特征图。
a. 使用图像金字塔构建特征金字塔。 特征是根据每个不同大小比例的图像独立计算的,每计算一次特征都需要resize一下图片大小,耗时,速度很慢。
b. 检测系统都在采用的为了更快地检测而使用的单尺度特征检测。
c. 由卷积计算的金字塔特征层次来进行目标位置预测,但底层feature map特征表达能力不足。
d. 特征金字塔网络(FPN)和b,c一样快, 但更准确。
FPN的提出是为了实现更好的feature maps融合,一般的网络都是直接使用最后一层的feature maps,虽然最后一层的 feature maps 语义强,但是位置和分辨率都比较低,容易 检测不到比较小的物体。FPN的功能就是融合了底层到高层 的feature maps ,从而充分的利用了提取到的各个阶段的特征(ResNet中的C2-C5)。
3.6 Mask R-CNN:FPN
特征金字塔FPN的构建
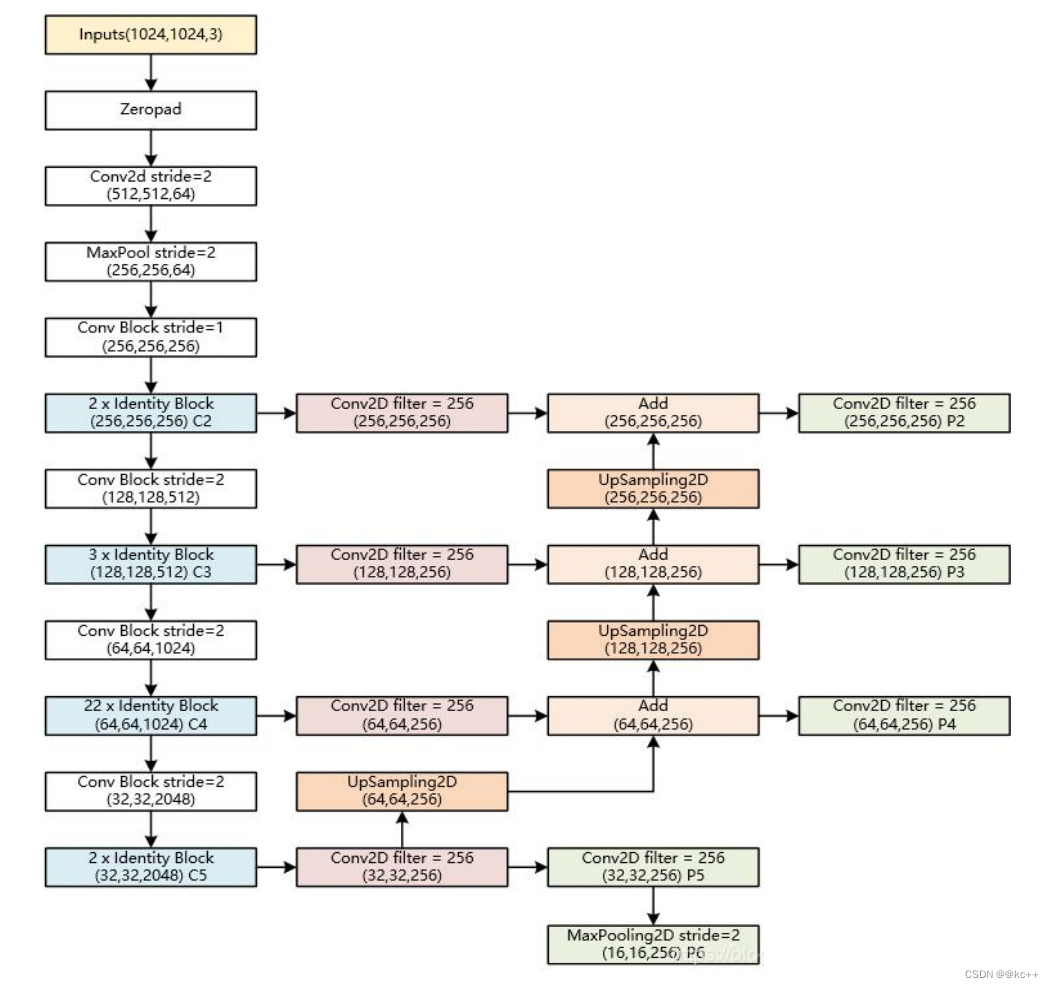
- 特征金字塔FPN的构建是为了实现特征多尺度的融合,在Mask R-CNN当中,我们取出在主干特征提取网络中长宽压缩了两次 C2、三次C3、四次C4、五次C5的结果来进行特征金字塔结构的构造。
- P2-P5是将来用于预测物体的bbox,box- regression,mask的。
- P2-P6是用于训练RPN的,即P6只用于RPN 网络中。
3.7 Faster-RCNN:Roi pooling
为何需要RoI Pooling?
对于传统的CNN(如AlexNet和VGG),当网络训练好后输入的图像尺寸必须是固定值,同时网络输出也是固定大小的vector or matrix。如果输入图像大小不定,这个问题就变得比较麻烦。
有2种解决办法:
- 从图像中crop一部分传入网络将图像(破坏了图像的完整结构)
- warp成需要的大小后传入网络(破坏了图像原始形状信息)

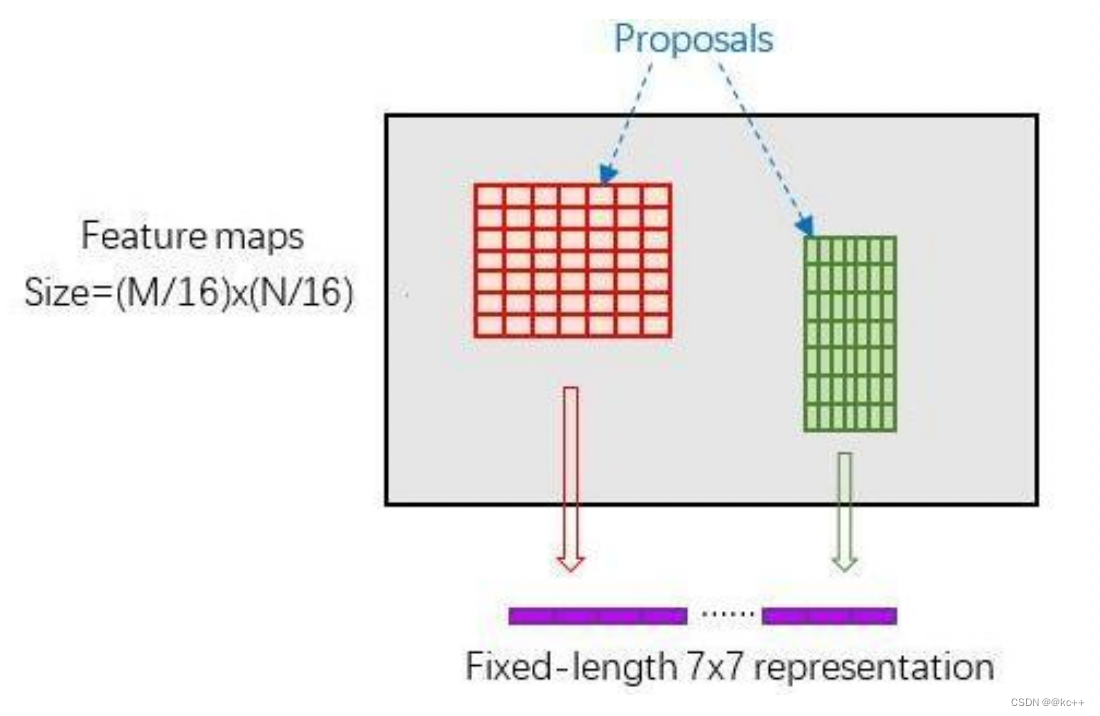
RoI Pooling原理
新参数pooled_w、pooled_h和spatial_scale(1/16)
RoI Pooling layer forward过程:
- 由于proposal是对应MN尺度的,所以首先使用spatial_scale参数将其映射回(M/16)(N/16)大小的feature map尺度;
- 再将每个proposal对应的feature map区域水平分为poold_w * pooled_h的网格;
- 对网格的每一份都进行max pooling处理。
这样处理后,即使大小不同的proposal输出结果都是poold_w * pooled_h固定大小,实现了固定长度输出。
再将每个proposal对应的feature map区 域水平分为poold_w * pooled_h的网格;
对网格的每一份都进行max pooling处理
这样处理后,即使大小不同的proposal输 出结果都是poold_w * pooled_h固定大小, 实现了固定长度输出。
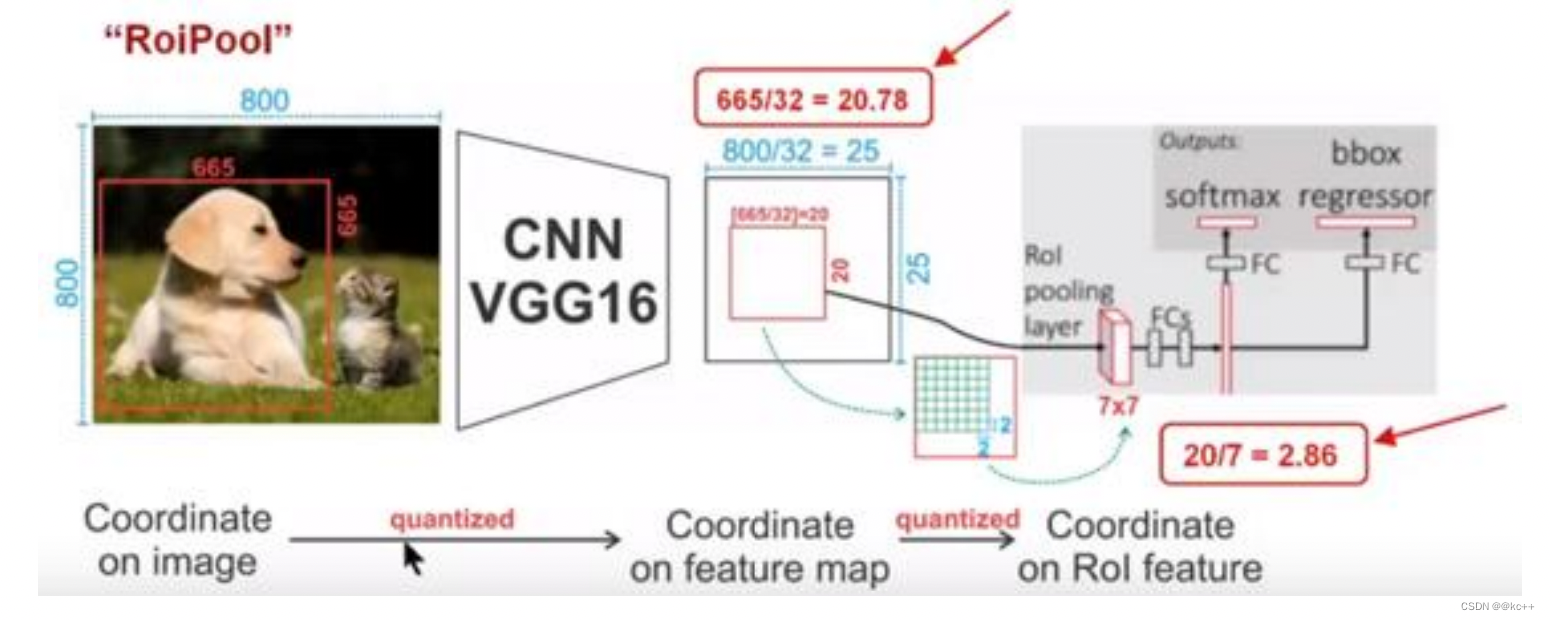
3.8 Mask R-CNN:Roi-Align
Roi-Align
Mask-RCNN中提出了一个新的思想就是RoIAlign,其实RoIAlign就是在RoI pooling上稍微改动过来的,但是为什么在模型中不继续使用RoI pooling呢?
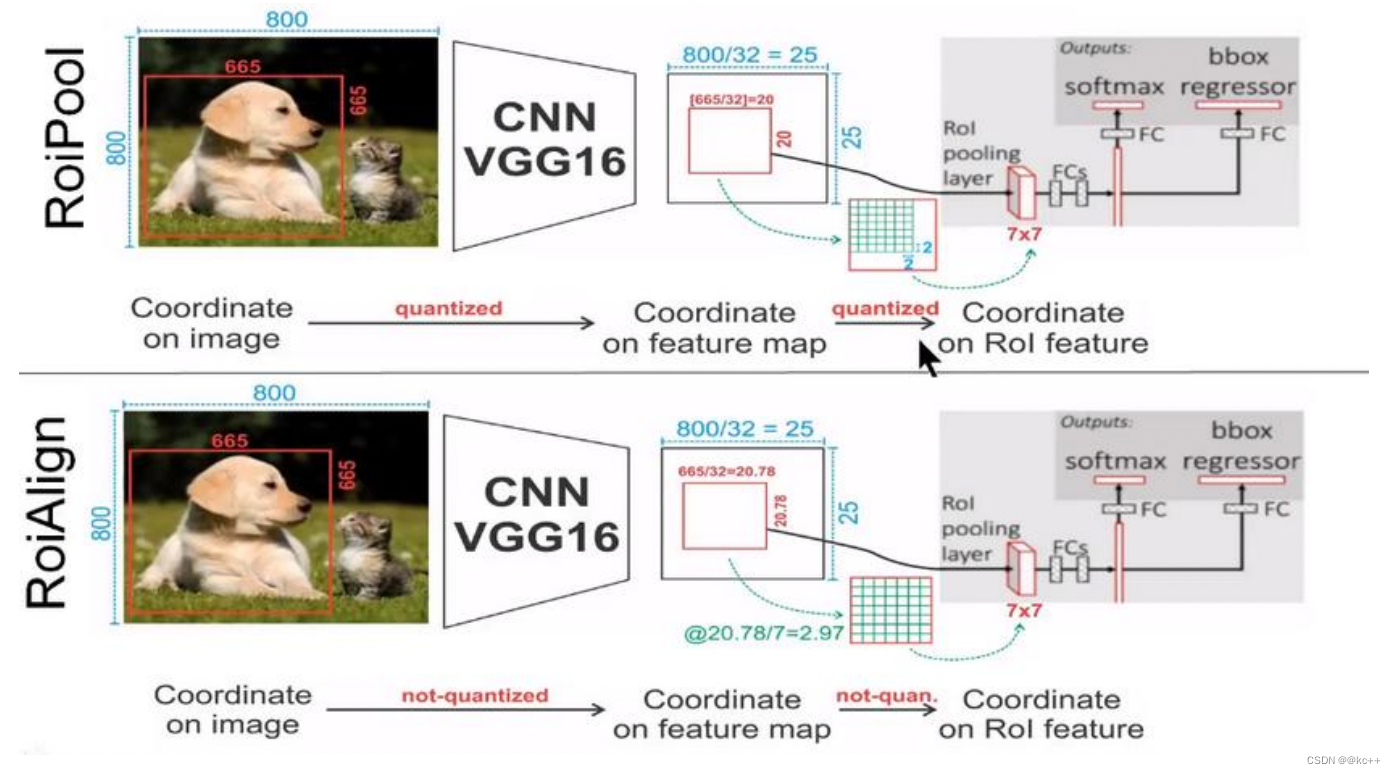
在RoI pooling中出现了两次的取整,虽然在feature maps上取整看起来只是小数级别的数,但是当把feature map还原到原图上时就会出现很大的偏差,比如第一次的取整是舍去了0.78 (665/32=20.78),还原到原图时是20*32=640,第一次取整就存在了25个像素点的偏差,在第二次的取整后的偏差更加的大。对于分类和物体检测来说可能这不是一个很大的误差,但是对于实例分割而言,这是一个非常大的偏差,因为mask出现没对齐的话在视觉上是很明显的。而RoIAlign的提出就是为了解决这个不对齐问题。
RoIAlign的思想其实很简单,就是取消了取整的这种粗暴做法,而是通过双线性插值来得到固定四个点坐标的像素值,从而使得不连续的操作变得连续起来,返回到原图的时候误差也就更加的小。
它充分的利用了原图中虚拟点(比如20.56这个浮点数。像素位置都是整数值,没有浮点值)四周的四个真实存在的像素值来共同决定目标图中的一个像素值,即可以将20.56这个虚拟的位置点对应的像素值估计出来。
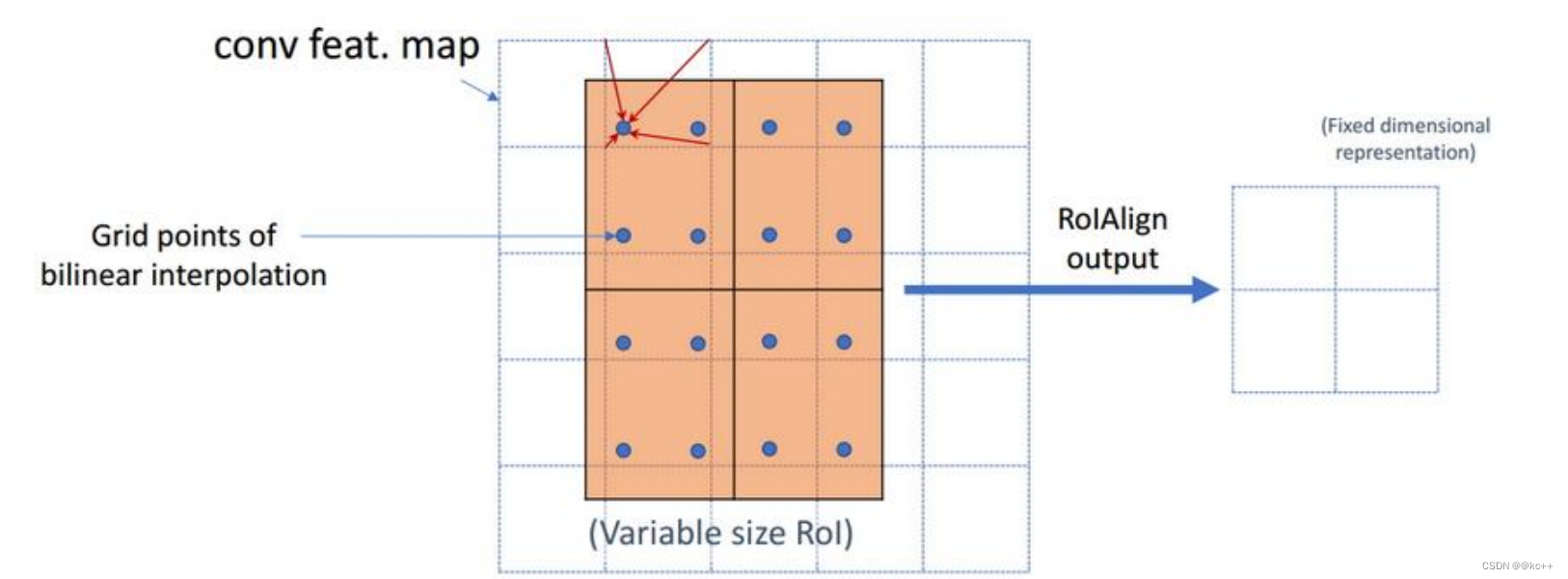
- 蓝色的虚线框表示卷积后获得的feature map,黑色实线框表示ROI feature。
- 最后需要输出的大小是2x2,那么我们就利用双线性插值来估计这些蓝点(虚拟坐标点,又称双线性插值的网格点)处所对应的像素值,最后得到相应的输出。
- 然后在每一个橘红色的区域里面进行max pooling或者average pooling操作,获得最终2x2的输出结果。我们的整个过程中没有用到量化操作,没有引入误差,即原图中的像素和feature map中的像素是完全对齐的,没有偏差,这不仅会提高检测的精度,同时也会有利于实例分割。
3.9 Mask R-CNN:分割掩膜
获得感兴趣区域(ROI)后,给已有框架加上一个掩膜分支,每个囊括特定对象的区域都会被赋予一个掩膜。每个区域都会被赋予一个m X m掩膜,并按比例放大以便推断。
mask语义分割信息的获取
在之前的步骤中,我们获得了预测框,我们把这个预测框作为mask模型的区域截取部分,利用这个预测框对mask模型中用到的公用特征层进行截取。
截取后,利用mask模型再对像素点进行分类,获得语义分割结果。
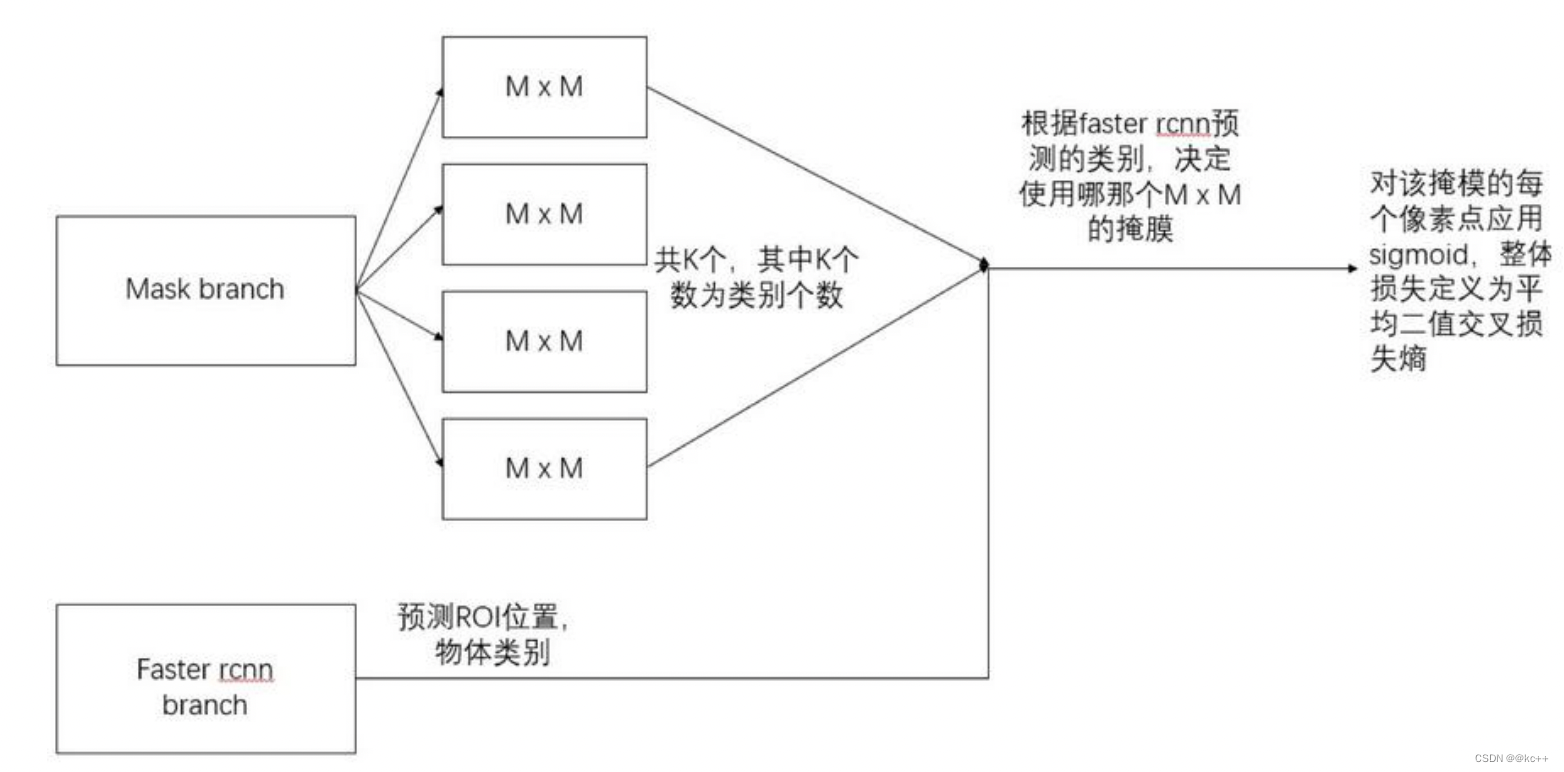
mask分支采用FCN对每个RoI产生一个Kmm的输出,即K个分辨率为m*m的二值的掩膜,K为分类物体的种类数目。
Kmm二值mask结构解释:最终的FCN输出一个K层的mask,每一层为一类。用0.5作为阈值进行二值化,产生背景和前景的分割Mask。
对于预测的二值掩膜输出,我们对每个像素点应用sigmoid函数(或softmax等),整体损失定义为交叉熵。引入预测K个输出的机制,允许每个类都生成独立的掩膜,避免类间竞争。这样做解耦了掩膜和种类预测。
Mask R-CNN的损失函数为:
Lmask 使得网络能够输出每一类的 mask,且不会有不同类别 mask 间的竞争:
- 分类网络分支预测 object 类别标签,以选择输出 mask。对每一个ROI,如果检测得到的ROI属于哪一个分类,就只使用哪一个分支的交叉熵误差作为误差值进行计算。
- 举例说明:分类有3类(猫,狗,人),检测得到当前ROI属于“人”这一类,那么所使用的Lmask为 “人”这一分支的mask,即每个class类别对应一个mask可以有效避免类间竞争(其他class不贡献Loss)
- 对每一个像素应用sigmoid,然后取RoI上所有像素的交叉熵的平均值作为Lmask。
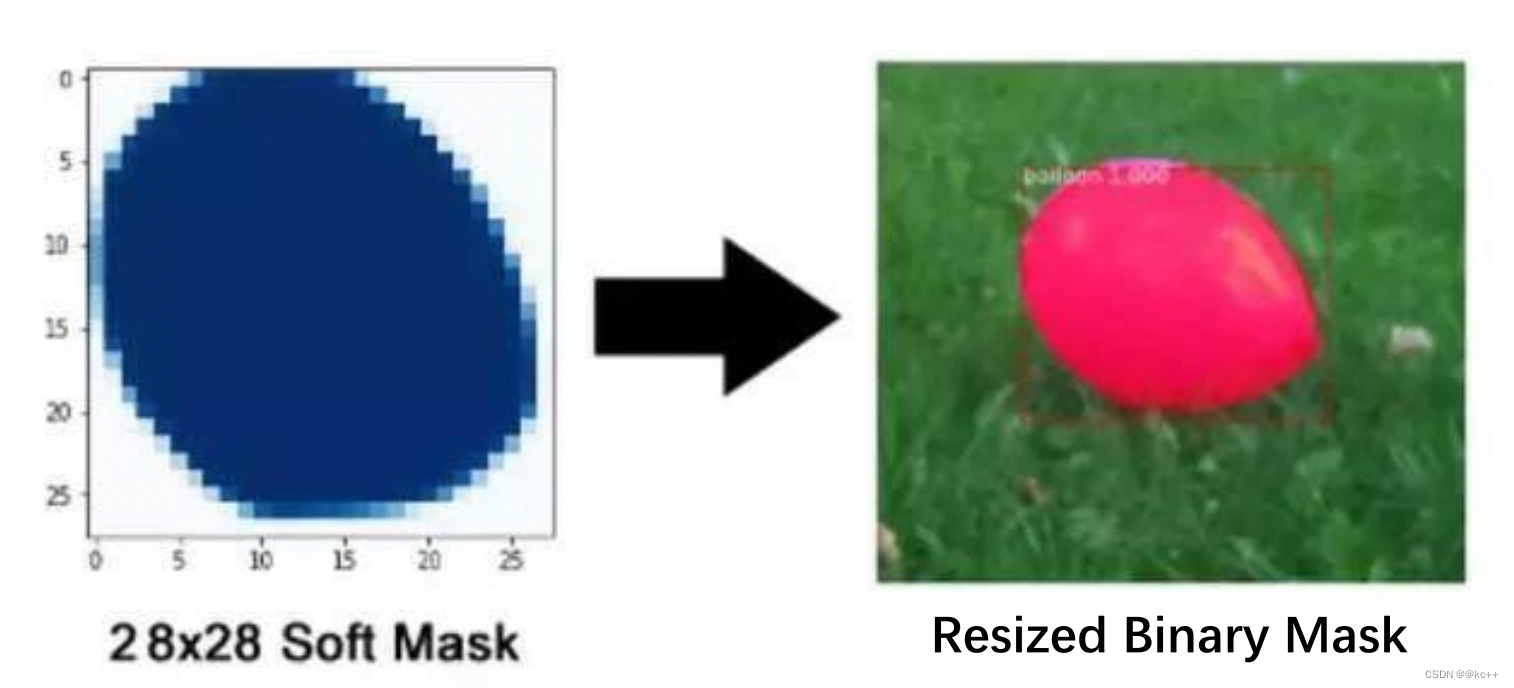
最后网络输出为1414或者2828大小的mask,如何与原图目标对应?
需要一个后处理,将模型预测的mask通过resize得到与proposal中目标相同大小的mask。
3.10 Mask R-CNN—总结
主要改进点:
- 基础网络的增强,ResNet-101+FPN的组合可以说是现在特征学习的王牌了;
- 分割 loss 的改进, 二值交叉熵会使得每一类的 mask 不相互竞争,而不是和其他类别的 mask 比较
- ROIAlign解决不对齐的问题,就是对 feature map 的插值。直接的ROIPooling的那种量化操作会使得得到的mask与实际物体位置有一个微小偏移,是工程上更好的实现方式。
3.11 Mask R-CNN:COCO数据集
MS COCO的全称是Microsoft Common Objects in Context,起源于微软于2014年出资标注的 Microsoft COCO数据集,与ImageNet竞赛一样,被视为是计算机视觉领域最受关注和最权威的比赛之一。
COCO数据集是一个大型的、丰富的物体检测,分割和字幕数据集。这个数据集以scene understanding为目标,主要从复杂的日常场景中截取图像中的目标,通过精确的segmentation 进行位置的标定。
包括:
- 对象分割;
- 在上下文中可识别;
- 超像素分割;
- 330K图像(> 200K标记);
- 150万个对象实例;
- 80个对象类别;
- 91个类别;
- 每张图片5个字幕;
- 有关键点的250,000人;
4. 视频结构化
视频结构化:
原始的视频图像实际上是一种非结构化的数据,它不能直接被计算机读取和识别,为了 让视频图像在安防等领域更好的应用,就必须使用智能视频分析技术对视频图像进行结构化处理,也就是视频结构化。
视频结构化,即视频数据的结构化处理,就是通过对原始视频进行智能分析,提取出关键信息
一段视频里面,需要提取的关键信息有哪些?
主要是有两类:
- 第一类是运动目标的识别,也就是画面中运动对象的识别,是人还是车;
- 第二类是运动目标特征的识别,也就是画面中运动的人、车、物有什么特征;
5. 代码示例
5.1 nets
layers.py
import tensorflow as tf
from keras.engine import Layer
import numpy as np
from utils import utils#----------------------------------------------------------#
# Proposal Layer
# 该部分代码用于将先验框转化成建议框
#----------------------------------------------------------#def apply_box_deltas_graph(boxes, deltas):# 计算先验框的中心和宽高height = boxes[:, 2] - boxes[:, 0]width = boxes[:, 3] - boxes[:, 1]center_y = boxes[:, 0] + 0.5 * heightcenter_x = boxes[:, 1] + 0.5 * width# 计算出调整后的先验框的中心和宽高center_y += deltas[:, 0] * heightcenter_x += deltas[:, 1] * widthheight *= tf.exp(deltas[:, 2])width *= tf.exp(deltas[:, 3])# 计算左上角和右下角的点的坐标y1 = center_y - 0.5 * heightx1 = center_x - 0.5 * widthy2 = y1 + heightx2 = x1 + widthresult = tf.stack([y1, x1, y2, x2], axis=1, name="apply_box_deltas_out")return resultdef clip_boxes_graph(boxes, window):"""boxes: [N, (y1, x1, y2, x2)]window: [4] in the form y1, x1, y2, x2"""# Splitwy1, wx1, wy2, wx2 = tf.split(window, 4)y1, x1, y2, x2 = tf.split(boxes, 4, axis=1)# Clipy1 = tf.maximum(tf.minimum(y1, wy2), wy1)x1 = tf.maximum(tf.minimum(x1, wx2), wx1)y2 = tf.maximum(tf.minimum(y2, wy2), wy1)x2 = tf.maximum(tf.minimum(x2, wx2), wx1)clipped = tf.concat([y1, x1, y2, x2], axis=1, name="clipped_boxes")clipped.set_shape((clipped.shape[0], 4))return clippedclass ProposalLayer(Layer):def __init__(self, proposal_count, nms_threshold, config=None, **kwargs):super(ProposalLayer, self).__init__(**kwargs)self.config = configself.proposal_count = proposal_countself.nms_threshold = nms_threshold# [rpn_class, rpn_bbox, anchors]def call(self, inputs):# 代表这个先验框内部是否有物体[batch, num_rois, 1]scores = inputs[0][:, :, 1]# 代表这个先验框的调整参数[batch, num_rois, 4]deltas = inputs[1]# [0.1 0.1 0.2 0.2],改变数量级deltas = deltas * np.reshape(self.config.RPN_BBOX_STD_DEV, [1, 1, 4])# Anchorsanchors = inputs[2]# 筛选出得分前6000个的框pre_nms_limit = tf.minimum(self.config.PRE_NMS_LIMIT, tf.shape(anchors)[1])# 获得这些框的索引ix = tf.nn.top_k(scores, pre_nms_limit, sorted=True,name="top_anchors").indices# 获得这些框的得分scores = utils.batch_slice([scores, ix], lambda x, y: tf.gather(x, y),self.config.IMAGES_PER_GPU)# 获得这些框的调整参数deltas = utils.batch_slice([deltas, ix], lambda x, y: tf.gather(x, y),self.config.IMAGES_PER_GPU)# 获得这些框对应的先验框pre_nms_anchors = utils.batch_slice([anchors, ix], lambda a, x: tf.gather(a, x),self.config.IMAGES_PER_GPU,names=["pre_nms_anchors"])# [batch, N, (y1, x1, y2, x2)]# 对先验框进行解码boxes = utils.batch_slice([pre_nms_anchors, deltas],lambda x, y: apply_box_deltas_graph(x, y),self.config.IMAGES_PER_GPU,names=["refined_anchors"])# [batch, N, (y1, x1, y2, x2)]# 防止超出图片范围window = np.array([0, 0, 1, 1], dtype=np.float32)boxes = utils.batch_slice(boxes,lambda x: clip_boxes_graph(x, window),self.config.IMAGES_PER_GPU,names=["refined_anchors_clipped"])# 非极大抑制def nms(boxes, scores):indices = tf.image.non_max_suppression(boxes, scores, self.proposal_count,self.nms_threshold, name="rpn_non_max_suppression")proposals = tf.gather(boxes, indices)# 如果数量达不到设置的建议框数量的话# 就paddingpadding = tf.maximum(self.proposal_count - tf.shape(proposals)[0], 0)proposals = tf.pad(proposals, [(0, padding), (0, 0)])return proposalsproposals = utils.batch_slice([boxes, scores], nms,self.config.IMAGES_PER_GPU)return proposalsdef compute_output_shape(self, input_shape):return (None, self.proposal_count, 4)#----------------------------------------------------------#
# ROIAlign Layer
# 利用建议框在特征层上截取内容
#----------------------------------------------------------#def log2_graph(x):return tf.log(x) / tf.log(2.0)def parse_image_meta_graph(meta):"""将meta里面的参数进行分割"""image_id = meta[:, 0]original_image_shape = meta[:, 1:4]image_shape = meta[:, 4:7]window = meta[:, 7:11] # (y1, x1, y2, x2) window of image in in pixelsscale = meta[:, 11]active_class_ids = meta[:, 12:]return {"image_id": image_id,"original_image_shape": original_image_shape,"image_shape": image_shape,"window": window,"scale": scale,"active_class_ids": active_class_ids,}class PyramidROIAlign(Layer):def __init__(self, pool_shape, **kwargs):super(PyramidROIAlign, self).__init__(**kwargs)self.pool_shape = tuple(pool_shape)def call(self, inputs):# 建议框的位置boxes = inputs[0]# image_meta包含了一些必要的图片信息image_meta = inputs[1]# 取出所有的特征层[batch, height, width, channels]feature_maps = inputs[2:]y1, x1, y2, x2 = tf.split(boxes, 4, axis=2)h = y2 - y1w = x2 - x1# 获得输入进来的图像的大小image_shape = parse_image_meta_graph(image_meta)['image_shape'][0]# 通过建议框的大小找到这个建议框属于哪个特征层image_area = tf.cast(image_shape[0] * image_shape[1], tf.float32)roi_level = log2_graph(tf.sqrt(h * w) / (224.0 / tf.sqrt(image_area)))roi_level = tf.minimum(5, tf.maximum(2, 4 + tf.cast(tf.round(roi_level), tf.int32)))# batch_size, box_numroi_level = tf.squeeze(roi_level, 2)# Loop through levels and apply ROI pooling to each. P2 to P5.pooled = []box_to_level = []# 分别在P2-P5中进行截取for i, level in enumerate(range(2, 6)):# 找到每个特征层对应boxix = tf.where(tf.equal(roi_level, level))level_boxes = tf.gather_nd(boxes, ix)box_to_level.append(ix)# 获得这些box所属的图片box_indices = tf.cast(ix[:, 0], tf.int32)# 停止梯度下降level_boxes = tf.stop_gradient(level_boxes)box_indices = tf.stop_gradient(box_indices)# Result: [batch * num_boxes, pool_height, pool_width, channels]pooled.append(tf.image.crop_and_resize(feature_maps[i], level_boxes, box_indices, self.pool_shape,method="bilinear"))pooled = tf.concat(pooled, axis=0)# 将顺序和所属的图片进行堆叠box_to_level = tf.concat(box_to_level, axis=0)box_range = tf.expand_dims(tf.range(tf.shape(box_to_level)[0]), 1)box_to_level = tf.concat([tf.cast(box_to_level, tf.int32), box_range],axis=1)# box_to_level[:, 0]表示第几张图# box_to_level[:, 1]表示第几张图里的第几个框sorting_tensor = box_to_level[:, 0] * 100000 + box_to_level[:, 1]# 进行排序,将同一张图里的某一些聚集在一起ix = tf.nn.top_k(sorting_tensor, k=tf.shape(box_to_level)[0]).indices[::-1]# 按顺序获得图片的索引ix = tf.gather(box_to_level[:, 2], ix)pooled = tf.gather(pooled, ix)# 重新reshape为原来的格式# 也就是# Shape: [batch, num_rois, POOL_SIZE, POOL_SIZE, channels]shape = tf.concat([tf.shape(boxes)[:2], tf.shape(pooled)[1:]], axis=0)pooled = tf.reshape(pooled, shape)return pooleddef compute_output_shape(self, input_shape):return input_shape[0][:2] + self.pool_shape + (input_shape[2][-1], )#----------------------------------------------------------#
# Detection Layer
#
#----------------------------------------------------------#def refine_detections_graph(rois, probs, deltas, window, config):"""细化分类建议并过滤重叠部分并返回最终结果探测。Inputs:rois: [N, (y1, x1, y2, x2)] in normalized coordinatesprobs: [N, num_classes]. Class probabilities.deltas: [N, num_classes, (dy, dx, log(dh), log(dw))]. Class-specificbounding box deltas.window: (y1, x1, y2, x2) in normalized coordinates. The part of the imagethat contains the image excluding the padding.Returns detections shaped: [num_detections, (y1, x1, y2, x2, class_id, score)] wherecoordinates are normalized."""# 找到得分最高的类class_ids = tf.argmax(probs, axis=1, output_type=tf.int32)# 序号+类indices = tf.stack([tf.range(probs.shape[0]), class_ids], axis=1)# 取出成绩class_scores = tf.gather_nd(probs, indices)# 还有框的调整参数deltas_specific = tf.gather_nd(deltas, indices)# 进行解码# Shape: [boxes, (y1, x1, y2, x2)] in normalized coordinatesrefined_rois = apply_box_deltas_graph(rois, deltas_specific * config.BBOX_STD_DEV)# 防止超出0-1refined_rois = clip_boxes_graph(refined_rois, window)# 去除背景keep = tf.where(class_ids > 0)[:, 0]# 去除背景和得分小的区域if config.DETECTION_MIN_CONFIDENCE:conf_keep = tf.where(class_scores >= config.DETECTION_MIN_CONFIDENCE)[:, 0]keep = tf.sets.set_intersection(tf.expand_dims(keep, 0),tf.expand_dims(conf_keep, 0))keep = tf.sparse_tensor_to_dense(keep)[0]# 获得除去背景并且得分较高的框还有种类与得分# 1. Prepare variablespre_nms_class_ids = tf.gather(class_ids, keep)pre_nms_scores = tf.gather(class_scores, keep)pre_nms_rois = tf.gather(refined_rois, keep)unique_pre_nms_class_ids = tf.unique(pre_nms_class_ids)[0]def nms_keep_map(class_id):ixs = tf.where(tf.equal(pre_nms_class_ids, class_id))[:, 0]class_keep = tf.image.non_max_suppression(tf.gather(pre_nms_rois, ixs),tf.gather(pre_nms_scores, ixs),max_output_size=config.DETECTION_MAX_INSTANCES,iou_threshold=config.DETECTION_NMS_THRESHOLD)class_keep = tf.gather(keep, tf.gather(ixs, class_keep))gap = config.DETECTION_MAX_INSTANCES - tf.shape(class_keep)[0]class_keep = tf.pad(class_keep, [(0, gap)],mode='CONSTANT', constant_values=-1)class_keep.set_shape([config.DETECTION_MAX_INSTANCES])return class_keep# 2. 进行非极大抑制nms_keep = tf.map_fn(nms_keep_map, unique_pre_nms_class_ids,dtype=tf.int64)# 3. 找到符合要求的需要被保留的建议框nms_keep = tf.reshape(nms_keep, [-1])nms_keep = tf.gather(nms_keep, tf.where(nms_keep > -1)[:, 0])# 4. Compute intersection between keep and nms_keepkeep = tf.sets.set_intersection(tf.expand_dims(keep, 0),tf.expand_dims(nms_keep, 0))keep = tf.sparse_tensor_to_dense(keep)[0]# 寻找得分最高的num_keep个框roi_count = config.DETECTION_MAX_INSTANCESclass_scores_keep = tf.gather(class_scores, keep)num_keep = tf.minimum(tf.shape(class_scores_keep)[0], roi_count)top_ids = tf.nn.top_k(class_scores_keep, k=num_keep, sorted=True)[1]keep = tf.gather(keep, top_ids)# Arrange output as [N, (y1, x1, y2, x2, class_id, score)]detections = tf.concat([tf.gather(refined_rois, keep),tf.to_float(tf.gather(class_ids, keep))[..., tf.newaxis],tf.gather(class_scores, keep)[..., tf.newaxis]], axis=1)# 如果达不到数量的话就paddinggap = config.DETECTION_MAX_INSTANCES - tf.shape(detections)[0]detections = tf.pad(detections, [(0, gap), (0, 0)], "CONSTANT")return detectionsdef norm_boxes_graph(boxes, shape):h, w = tf.split(tf.cast(shape, tf.float32), 2)scale = tf.concat([h, w, h, w], axis=-1) - tf.constant(1.0)shift = tf.constant([0., 0., 1., 1.])return tf.divide(boxes - shift, scale)class DetectionLayer(Layer):def __init__(self, config=None, **kwargs):super(DetectionLayer, self).__init__(**kwargs)self.config = configdef call(self, inputs):rois = inputs[0]mrcnn_class = inputs[1]mrcnn_bbox = inputs[2]image_meta = inputs[3]# 找到window的小数形式m = parse_image_meta_graph(image_meta)image_shape = m['image_shape'][0]window = norm_boxes_graph(m['window'], image_shape[:2])# Run detection refinement graph on each item in the batchdetections_batch = utils.batch_slice([rois, mrcnn_class, mrcnn_bbox, window],lambda x, y, w, z: refine_detections_graph(x, y, w, z, self.config),self.config.IMAGES_PER_GPU)# Reshape output# [batch, num_detections, (y1, x1, y2, x2, class_id, class_score)] in# normalized coordinatesreturn tf.reshape(detections_batch,[self.config.BATCH_SIZE, self.config.DETECTION_MAX_INSTANCES, 6])def compute_output_shape(self, input_shape):return (None, self.config.DETECTION_MAX_INSTANCES, 6)#----------------------------------------------------------#
# Detection Target Layer
# 该部分代码会输入建议框
# 判断建议框和真实框的重合情况
# 筛选出内部包含物体的建议框
# 利用建议框和真实框编码
# 调整mask的格式使得其和预测格式相同
#----------------------------------------------------------#def overlaps_graph(boxes1, boxes2):"""用于计算boxes1和boxes2的重合程度boxes1, boxes2: [N, (y1, x1, y2, x2)].返回 [len(boxes1), len(boxes2)]"""b1 = tf.reshape(tf.tile(tf.expand_dims(boxes1, 1),[1, 1, tf.shape(boxes2)[0]]), [-1, 4])b2 = tf.tile(boxes2, [tf.shape(boxes1)[0], 1])b1_y1, b1_x1, b1_y2, b1_x2 = tf.split(b1, 4, axis=1)b2_y1, b2_x1, b2_y2, b2_x2 = tf.split(b2, 4, axis=1)y1 = tf.maximum(b1_y1, b2_y1)x1 = tf.maximum(b1_x1, b2_x1)y2 = tf.minimum(b1_y2, b2_y2)x2 = tf.minimum(b1_x2, b2_x2)intersection = tf.maximum(x2 - x1, 0) * tf.maximum(y2 - y1, 0)b1_area = (b1_y2 - b1_y1) * (b1_x2 - b1_x1)b2_area = (b2_y2 - b2_y1) * (b2_x2 - b2_x1)union = b1_area + b2_area - intersectioniou = intersection / unionoverlaps = tf.reshape(iou, [tf.shape(boxes1)[0], tf.shape(boxes2)[0]])return overlapsdef detection_targets_graph(proposals, gt_class_ids, gt_boxes, gt_masks, config):asserts = [tf.Assert(tf.greater(tf.shape(proposals)[0], 0), [proposals],name="roi_assertion"),]with tf.control_dependencies(asserts):proposals = tf.identity(proposals)# 移除之前获得的padding的部分proposals, _ = trim_zeros_graph(proposals, name="trim_proposals")gt_boxes, non_zeros = trim_zeros_graph(gt_boxes, name="trim_gt_boxes")gt_class_ids = tf.boolean_mask(gt_class_ids, non_zeros,name="trim_gt_class_ids")gt_masks = tf.gather(gt_masks, tf.where(non_zeros)[:, 0], axis=2,name="trim_gt_masks")# Handle COCO crowds# A crowd box in COCO is a bounding box around several instances. Exclude# them from training. A crowd box is given a negative class ID.crowd_ix = tf.where(gt_class_ids < 0)[:, 0]non_crowd_ix = tf.where(gt_class_ids > 0)[:, 0]crowd_boxes = tf.gather(gt_boxes, crowd_ix)gt_class_ids = tf.gather(gt_class_ids, non_crowd_ix)gt_boxes = tf.gather(gt_boxes, non_crowd_ix)gt_masks = tf.gather(gt_masks, non_crowd_ix, axis=2)# 计算建议框和所有真实框的重合程度 [proposals, gt_boxes]overlaps = overlaps_graph(proposals, gt_boxes)# 计算和 crowd boxes 的重合程度 [proposals, crowd_boxes]crowd_overlaps = overlaps_graph(proposals, crowd_boxes)crowd_iou_max = tf.reduce_max(crowd_overlaps, axis=1)no_crowd_bool = (crowd_iou_max < 0.001)# Determine positive and negative ROIsroi_iou_max = tf.reduce_max(overlaps, axis=1)# 1. 正样本建议框和真实框的重合程度大于0.5positive_roi_bool = (roi_iou_max >= 0.5)positive_indices = tf.where(positive_roi_bool)[:, 0]# 2. 负样本建议框和真实框的重合程度小于0.5,Skip crowds.negative_indices = tf.where(tf.logical_and(roi_iou_max < 0.5, no_crowd_bool))[:, 0]# Subsample ROIs. Aim for 33% positive# 进行正负样本的平衡# 取出最大33%的正样本positive_count = int(config.TRAIN_ROIS_PER_IMAGE *config.ROI_POSITIVE_RATIO)positive_indices = tf.random_shuffle(positive_indices)[:positive_count]positive_count = tf.shape(positive_indices)[0]# 保持正负样本比例r = 1.0 / config.ROI_POSITIVE_RATIOnegative_count = tf.cast(r * tf.cast(positive_count, tf.float32), tf.int32) - positive_countnegative_indices = tf.random_shuffle(negative_indices)[:negative_count]# 获得正样本和负样本positive_rois = tf.gather(proposals, positive_indices)negative_rois = tf.gather(proposals, negative_indices)# 获取建议框和真实框重合程度positive_overlaps = tf.gather(overlaps, positive_indices)# 判断是否有真实框roi_gt_box_assignment = tf.cond(tf.greater(tf.shape(positive_overlaps)[1], 0),true_fn = lambda: tf.argmax(positive_overlaps, axis=1),false_fn = lambda: tf.cast(tf.constant([]),tf.int64))# 找到每一个建议框对应的真实框和种类roi_gt_boxes = tf.gather(gt_boxes, roi_gt_box_assignment)roi_gt_class_ids = tf.gather(gt_class_ids, roi_gt_box_assignment)# 解码获得网络应该有得预测结果deltas = utils.box_refinement_graph(positive_rois, roi_gt_boxes)deltas /= config.BBOX_STD_DEV# 切换mask的形式[N, height, width, 1]transposed_masks = tf.expand_dims(tf.transpose(gt_masks, [2, 0, 1]), -1)# 取出对应的层roi_masks = tf.gather(transposed_masks, roi_gt_box_assignment)# Compute mask targetsboxes = positive_roisif config.USE_MINI_MASK:# Transform ROI coordinates from normalized image space# to normalized mini-mask space.y1, x1, y2, x2 = tf.split(positive_rois, 4, axis=1)gt_y1, gt_x1, gt_y2, gt_x2 = tf.split(roi_gt_boxes, 4, axis=1)gt_h = gt_y2 - gt_y1gt_w = gt_x2 - gt_x1y1 = (y1 - gt_y1) / gt_hx1 = (x1 - gt_x1) / gt_wy2 = (y2 - gt_y1) / gt_hx2 = (x2 - gt_x1) / gt_wboxes = tf.concat([y1, x1, y2, x2], 1)box_ids = tf.range(0, tf.shape(roi_masks)[0])masks = tf.image.crop_and_resize(tf.cast(roi_masks, tf.float32), boxes,box_ids,config.MASK_SHAPE)# Remove the extra dimension from masks.masks = tf.squeeze(masks, axis=3)# 防止resize后的结果不是1或者0masks = tf.round(masks)# 一般传入config.TRAIN_ROIS_PER_IMAGE个建议框进行训练,# 如果数量不够则paddingrois = tf.concat([positive_rois, negative_rois], axis=0)N = tf.shape(negative_rois)[0]P = tf.maximum(config.TRAIN_ROIS_PER_IMAGE - tf.shape(rois)[0], 0)rois = tf.pad(rois, [(0, P), (0, 0)])roi_gt_boxes = tf.pad(roi_gt_boxes, [(0, N + P), (0, 0)])roi_gt_class_ids = tf.pad(roi_gt_class_ids, [(0, N + P)])deltas = tf.pad(deltas, [(0, N + P), (0, 0)])masks = tf.pad(masks, [[0, N + P], (0, 0), (0, 0)])return rois, roi_gt_class_ids, deltas, masksdef trim_zeros_graph(boxes, name='trim_zeros'):"""如果前一步没有满POST_NMS_ROIS_TRAINING个建议框,会有padding要去掉padding"""non_zeros = tf.cast(tf.reduce_sum(tf.abs(boxes), axis=1), tf.bool)boxes = tf.boolean_mask(boxes, non_zeros, name=name)return boxes, non_zerosclass DetectionTargetLayer(Layer):"""找到建议框的ground_truthInputs:proposals: [batch, N, (y1, x1, y2, x2)]建议框gt_class_ids: [batch, MAX_GT_INSTANCES]每个真实框对应的类gt_boxes: [batch, MAX_GT_INSTANCES, (y1, x1, y2, x2)]真实框的位置gt_masks: [batch, height, width, MAX_GT_INSTANCES]真实框的语义分割情况Returns: rois: [batch, TRAIN_ROIS_PER_IMAGE, (y1, x1, y2, x2)]内部真实存在目标的建议框target_class_ids: [batch, TRAIN_ROIS_PER_IMAGE]每个建议框对应的类target_deltas: [batch, TRAIN_ROIS_PER_IMAGE, (dy, dx, log(dh), log(dw)]每个建议框应该有的调整参数target_mask: [batch, TRAIN_ROIS_PER_IMAGE, height, width]每个建议框语义分割情况"""def __init__(self, config, **kwargs):super(DetectionTargetLayer, self).__init__(**kwargs)self.config = configdef call(self, inputs):proposals = inputs[0]gt_class_ids = inputs[1]gt_boxes = inputs[2]gt_masks = inputs[3]# 对真实框进行编码names = ["rois", "target_class_ids", "target_bbox", "target_mask"]outputs = utils.batch_slice([proposals, gt_class_ids, gt_boxes, gt_masks],lambda w, x, y, z: detection_targets_graph(w, x, y, z, self.config),self.config.IMAGES_PER_GPU, names=names)return outputsdef compute_output_shape(self, input_shape):return [(None, self.config.TRAIN_ROIS_PER_IMAGE, 4), # rois(None, self.config.TRAIN_ROIS_PER_IMAGE), # class_ids(None, self.config.TRAIN_ROIS_PER_IMAGE, 4), # deltas(None, self.config.TRAIN_ROIS_PER_IMAGE, self.config.MASK_SHAPE[0],self.config.MASK_SHAPE[1]) # masks]def compute_mask(self, inputs, mask=None):return [None, None, None, None]mrcnn_training.py
import tensorflow as tf
import keras.backend as K
import random
import numpy as np
import logging
from utils import utils
from utils.anchors import compute_backbone_shapes,generate_pyramid_anchors
############################################################
# Loss Functions
############################################################def batch_pack_graph(x, counts, num_rows):"""Picks different number of values from each rowin x depending on the values in counts."""outputs = []for i in range(num_rows):outputs.append(x[i, :counts[i]])return tf.concat(outputs, axis=0)def smooth_l1_loss(y_true, y_pred):"""Implements Smooth-L1 loss.y_true and y_pred are typically: [N, 4], but could be any shape."""diff = K.abs(y_true - y_pred)less_than_one = K.cast(K.less(diff, 1.0), "float32")loss = (less_than_one * 0.5 * diff**2) + (1 - less_than_one) * (diff - 0.5)return lossdef rpn_class_loss_graph(rpn_match, rpn_class_logits):"""RPN anchor classifier loss.rpn_match: [batch, anchors, 1]. Anchor match type. 1=positive,-1=negative, 0=neutral anchor.rpn_class_logits: [batch, anchors, 2]. RPN classifier logits for BG/FG."""# Squeeze last dim to simplifyrpn_match = tf.squeeze(rpn_match, -1)# Get anchor classes. Convert the -1/+1 match to 0/1 values.anchor_class = K.cast(K.equal(rpn_match, 1), tf.int32)# Positive and Negative anchors contribute to the loss,# but neutral anchors (match value = 0) don't.indices = tf.where(K.not_equal(rpn_match, 0))# Pick rows that contribute to the loss and filter out the rest.rpn_class_logits = tf.gather_nd(rpn_class_logits, indices)anchor_class = tf.gather_nd(anchor_class, indices)# Cross entropy lossloss = K.sparse_categorical_crossentropy(target=anchor_class,output=rpn_class_logits,from_logits=True)loss = K.switch(tf.size(loss) > 0, K.mean(loss), tf.constant(0.0))return lossdef rpn_bbox_loss_graph(config, target_bbox, rpn_match, rpn_bbox):"""Return the RPN bounding box loss graph.config: the model config object.target_bbox: [batch, max positive anchors, (dy, dx, log(dh), log(dw))].Uses 0 padding to fill in unsed bbox deltas.rpn_match: [batch, anchors, 1]. Anchor match type. 1=positive,-1=negative, 0=neutral anchor.rpn_bbox: [batch, anchors, (dy, dx, log(dh), log(dw))]"""# Positive anchors contribute to the loss, but negative and# neutral anchors (match value of 0 or -1) don't.rpn_match = K.squeeze(rpn_match, -1)indices = tf.where(K.equal(rpn_match, 1))# Pick bbox deltas that contribute to the lossrpn_bbox = tf.gather_nd(rpn_bbox, indices)# Trim target bounding box deltas to the same length as rpn_bbox.batch_counts = K.sum(K.cast(K.equal(rpn_match, 1), tf.int32), axis=1)target_bbox = batch_pack_graph(target_bbox, batch_counts,config.IMAGES_PER_GPU)loss = smooth_l1_loss(target_bbox, rpn_bbox)loss = K.switch(tf.size(loss) > 0, K.mean(loss), tf.constant(0.0))return lossdef mrcnn_class_loss_graph(target_class_ids, pred_class_logits,active_class_ids):"""Loss for the classifier head of Mask RCNN.target_class_ids: [batch, num_rois]. Integer class IDs. Uses zeropadding to fill in the array.pred_class_logits: [batch, num_rois, num_classes]active_class_ids: [batch, num_classes]. Has a value of 1 forclasses that are in the dataset of the image, and 0for classes that are not in the dataset."""# During model building, Keras calls this function with# target_class_ids of type float32. Unclear why. Cast it# to int to get around it.target_class_ids = tf.cast(target_class_ids, 'int64')# Find predictions of classes that are not in the dataset.pred_class_ids = tf.argmax(pred_class_logits, axis=2)# TODO: Update this line to work with batch > 1. Right now it assumes all# images in a batch have the same active_class_idspred_active = tf.gather(active_class_ids[0], pred_class_ids)# Lossloss = tf.nn.sparse_softmax_cross_entropy_with_logits(labels=target_class_ids, logits=pred_class_logits)# Erase losses of predictions of classes that are not in the active# classes of the image.loss = loss * pred_active# Computer loss mean. Use only predictions that contribute# to the loss to get a correct mean.loss = tf.reduce_sum(loss) / tf.reduce_sum(pred_active)return lossdef mrcnn_bbox_loss_graph(target_bbox, target_class_ids, pred_bbox):"""Loss for Mask R-CNN bounding box refinement.target_bbox: [batch, num_rois, (dy, dx, log(dh), log(dw))]target_class_ids: [batch, num_rois]. Integer class IDs.pred_bbox: [batch, num_rois, num_classes, (dy, dx, log(dh), log(dw))]"""# Reshape to merge batch and roi dimensions for simplicity.target_class_ids = K.reshape(target_class_ids, (-1,))target_bbox = K.reshape(target_bbox, (-1, 4))pred_bbox = K.reshape(pred_bbox, (-1, K.int_shape(pred_bbox)[2], 4))# Only positive ROIs contribute to the loss. And only# the right class_id of each ROI. Get their indices.positive_roi_ix = tf.where(target_class_ids > 0)[:, 0]positive_roi_class_ids = tf.cast(tf.gather(target_class_ids, positive_roi_ix), tf.int64)indices = tf.stack([positive_roi_ix, positive_roi_class_ids], axis=1)# Gather the deltas (predicted and true) that contribute to losstarget_bbox = tf.gather(target_bbox, positive_roi_ix)pred_bbox = tf.gather_nd(pred_bbox, indices)# Smooth-L1 Lossloss = K.switch(tf.size(target_bbox) > 0,smooth_l1_loss(y_true=target_bbox, y_pred=pred_bbox),tf.constant(0.0))loss = K.mean(loss)return lossdef mrcnn_mask_loss_graph(target_masks, target_class_ids, pred_masks):"""Mask binary cross-entropy loss for the masks head.target_masks: [batch, num_rois, height, width].A float32 tensor of values 0 or 1. Uses zero padding to fill array.target_class_ids: [batch, num_rois]. Integer class IDs. Zero padded.pred_masks: [batch, proposals, height, width, num_classes] float32 tensorwith values from 0 to 1."""# Reshape for simplicity. Merge first two dimensions into one.target_class_ids = K.reshape(target_class_ids, (-1,))mask_shape = tf.shape(target_masks)target_masks = K.reshape(target_masks, (-1, mask_shape[2], mask_shape[3]))pred_shape = tf.shape(pred_masks)pred_masks = K.reshape(pred_masks,(-1, pred_shape[2], pred_shape[3], pred_shape[4]))# Permute predicted masks to [N, num_classes, height, width]pred_masks = tf.transpose(pred_masks, [0, 3, 1, 2])# Only positive ROIs contribute to the loss. And only# the class specific mask of each ROI.positive_ix = tf.where(target_class_ids > 0)[:, 0]positive_class_ids = tf.cast(tf.gather(target_class_ids, positive_ix), tf.int64)indices = tf.stack([positive_ix, positive_class_ids], axis=1)# Gather the masks (predicted and true) that contribute to lossy_true = tf.gather(target_masks, positive_ix)y_pred = tf.gather_nd(pred_masks, indices)# Compute binary cross entropy. If no positive ROIs, then return 0.# shape: [batch, roi, num_classes]loss = K.switch(tf.size(y_true) > 0,K.binary_crossentropy(target=y_true, output=y_pred),tf.constant(0.0))loss = K.mean(loss)return loss############################################################
# Data Generator
############################################################def load_image_gt(dataset, config, image_id, augment=False, augmentation=None,use_mini_mask=False):# 载入图片和语义分割效果image = dataset.load_image(image_id)mask, class_ids = dataset.load_mask(image_id)# print("\nbefore:",image_id,np.shape(mask),np.shape(class_ids))# 原始shapeoriginal_shape = image.shape# 获得新图片,原图片在新图片中的位置,变化的尺度,填充的情况等image, window, scale, padding, crop = utils.resize_image(image,min_dim=config.IMAGE_MIN_DIM,min_scale=config.IMAGE_MIN_SCALE,max_dim=config.IMAGE_MAX_DIM,mode=config.IMAGE_RESIZE_MODE)mask = utils.resize_mask(mask, scale, padding, crop)# print("\nafter:",np.shape(mask),np.shape(class_ids))# print(np.shape(image),np.shape(mask))# 可以把图片进行翻转if augment:logging.warning("'augment' is deprecated. Use 'augmentation' instead.")if random.randint(0, 1):image = np.fliplr(image)mask = np.fliplr(mask)if augmentation:import imgaug# 可用于图像增强MASK_AUGMENTERS = ["Sequential", "SomeOf", "OneOf", "Sometimes","Fliplr", "Flipud", "CropAndPad","Affine", "PiecewiseAffine"]def hook(images, augmenter, parents, default):"""Determines which augmenters to apply to masks."""return augmenter.__class__.__name__ in MASK_AUGMENTERSimage_shape = image.shapemask_shape = mask.shapedet = augmentation.to_deterministic()image = det.augment_image(image)mask = det.augment_image(mask.astype(np.uint8),hooks=imgaug.HooksImages(activator=hook))assert image.shape == image_shape, "Augmentation shouldn't change image size"assert mask.shape == mask_shape, "Augmentation shouldn't change mask size"mask = mask.astype(np.bool)# 检漏,防止某些层内部实际上不存在语义分割情况_idx = np.sum(mask, axis=(0, 1)) > 0# print("\nafterer:",np.shape(mask),np.shape(_idx))mask = mask[:, :, _idx]class_ids = class_ids[_idx]# 找到mask对应的boxbbox = utils.extract_bboxes(mask)active_class_ids = np.zeros([dataset.num_classes], dtype=np.int32)source_class_ids = dataset.source_class_ids[dataset.image_info[image_id]["source"]]active_class_ids[source_class_ids] = 1if use_mini_mask:mask = utils.minimize_mask(bbox, mask, config.MINI_MASK_SHAPE)# 生成Image_metaimage_meta = utils.compose_image_meta(image_id, original_shape, image.shape,window, scale, active_class_ids)return image, image_meta, class_ids, bbox, maskdef build_rpn_targets(image_shape, anchors, gt_class_ids, gt_boxes, config):# 1代表正样本# -1代表负样本# 0代表忽略rpn_match = np.zeros([anchors.shape[0]], dtype=np.int32)# 创建该部分内容利用先验框和真实框进行编码rpn_bbox = np.zeros((config.RPN_TRAIN_ANCHORS_PER_IMAGE, 4))'''iscrowd=0的时候,表示这是一个单独的物体,轮廓用Polygon(多边形的点)表示,iscrowd=1的时候表示两个没有分开的物体,轮廓用RLE编码表示,比如说一张图片里面有三个人,一个人单独站一边,另外两个搂在一起(标注的时候距离太近分不开了),这个时候,单独的那个人的注释里面的iscrowing=0,segmentation用Polygon表示,而另外两个用放在同一个anatation的数组里面用一个segmention的RLE编码形式表示'''crowd_ix = np.where(gt_class_ids < 0)[0]if crowd_ix.shape[0] > 0:non_crowd_ix = np.where(gt_class_ids > 0)[0]crowd_boxes = gt_boxes[crowd_ix]gt_class_ids = gt_class_ids[non_crowd_ix]gt_boxes = gt_boxes[non_crowd_ix]crowd_overlaps = utils.compute_overlaps(anchors, crowd_boxes)crowd_iou_max = np.amax(crowd_overlaps, axis=1)no_crowd_bool = (crowd_iou_max < 0.001)else:no_crowd_bool = np.ones([anchors.shape[0]], dtype=bool)# 计算先验框和真实框的重合程度 [num_anchors, num_gt_boxes]overlaps = utils.compute_overlaps(anchors, gt_boxes)# 1. 重合程度小于0.3则代表为负样本anchor_iou_argmax = np.argmax(overlaps, axis=1)anchor_iou_max = overlaps[np.arange(overlaps.shape[0]), anchor_iou_argmax]rpn_match[(anchor_iou_max < 0.3) & (no_crowd_bool)] = -1# 2. 每个真实框重合度最大的先验框是正样本gt_iou_argmax = np.argwhere(overlaps == np.max(overlaps, axis=0))[:,0]rpn_match[gt_iou_argmax] = 1# 3. 重合度大于0.7则代表为正样本rpn_match[anchor_iou_max >= 0.7] = 1# 正负样本平衡# 找到正样本的索引ids = np.where(rpn_match == 1)[0]# 如果大于(config.RPN_TRAIN_ANCHORS_PER_IMAGE // 2)则删掉一些extra = len(ids) - (config.RPN_TRAIN_ANCHORS_PER_IMAGE // 2)if extra > 0:ids = np.random.choice(ids, extra, replace=False)rpn_match[ids] = 0# 找到负样本的索引ids = np.where(rpn_match == -1)[0]# 使得总数为config.RPN_TRAIN_ANCHORS_PER_IMAGEextra = len(ids) - (config.RPN_TRAIN_ANCHORS_PER_IMAGE -np.sum(rpn_match == 1))if extra > 0:# Rest the extra ones to neutralids = np.random.choice(ids, extra, replace=False)rpn_match[ids] = 0# 找到内部真实存在物体的先验框,进行编码ids = np.where(rpn_match == 1)[0]ix = 0 for i, a in zip(ids, anchors[ids]):gt = gt_boxes[anchor_iou_argmax[i]]# 计算真实框的中心,高宽gt_h = gt[2] - gt[0]gt_w = gt[3] - gt[1]gt_center_y = gt[0] + 0.5 * gt_hgt_center_x = gt[1] + 0.5 * gt_w# 计算先验框中心,高宽a_h = a[2] - a[0]a_w = a[3] - a[1]a_center_y = a[0] + 0.5 * a_ha_center_x = a[1] + 0.5 * a_w# 编码运算rpn_bbox[ix] = [(gt_center_y - a_center_y) / a_h,(gt_center_x - a_center_x) / a_w,np.log(gt_h / a_h),np.log(gt_w / a_w),]# 改变数量级rpn_bbox[ix] /= config.RPN_BBOX_STD_DEVix += 1return rpn_match, rpn_bboxdef data_generator(dataset, config, shuffle=True, augment=False, augmentation=None,batch_size=1, detection_targets=False,no_augmentation_sources=None):"""inputs list:- images: [batch, H, W, C]- image_meta: [batch, (meta data)] Image details. See compose_image_meta()- rpn_match: [batch, N] Integer (1=positive anchor, -1=negative, 0=neutral)- rpn_bbox: [batch, N, (dy, dx, log(dh), log(dw))] Anchor bbox deltas.- gt_class_ids: [batch, MAX_GT_INSTANCES] Integer class IDs- gt_boxes: [batch, MAX_GT_INSTANCES, (y1, x1, y2, x2)]- gt_masks: [batch, height, width, MAX_GT_INSTANCES]. The height and widthare those of the image unless use_mini_mask is True, in whichcase they are defined in MINI_MASK_SHAPE.outputs list: Usually empty in regular training. But if detection_targetsis True then the outputs list contains target class_ids, bbox deltas,and masks."""b = 0 # batch item indeximage_index = -1image_ids = np.copy(dataset.image_ids)no_augmentation_sources = no_augmentation_sources or []# [anchor_count, (y1, x1, y2, x2)]# 计算获得先验框backbone_shapes = compute_backbone_shapes(config, config.IMAGE_SHAPE)anchors = generate_pyramid_anchors(config.RPN_ANCHOR_SCALES,config.RPN_ANCHOR_RATIOS,backbone_shapes,config.BACKBONE_STRIDES,config.RPN_ANCHOR_STRIDE)while True:image_index = (image_index + 1) % len(image_ids)if shuffle and image_index == 0:np.random.shuffle(image_ids)# 获得idimage_id = image_ids[image_index]# 获得图片,真实框,语义分割结果等if dataset.image_info[image_id]['source'] in no_augmentation_sources:image, image_meta, gt_class_ids, gt_boxes, gt_masks = \load_image_gt(dataset, config, image_id, augment=augment,augmentation=None,use_mini_mask=config.USE_MINI_MASK)else:image, image_meta, gt_class_ids, gt_boxes, gt_masks = \load_image_gt(dataset, config, image_id, augment=augment,augmentation=augmentation,use_mini_mask=config.USE_MINI_MASK)if not np.any(gt_class_ids > 0):continue# RPN Targetsrpn_match, rpn_bbox = build_rpn_targets(image.shape, anchors,gt_class_ids, gt_boxes, config)# 如果某张图片里面物体的数量大于最大值的话,则进行筛选,防止过大if gt_boxes.shape[0] > config.MAX_GT_INSTANCES:ids = np.random.choice(np.arange(gt_boxes.shape[0]), config.MAX_GT_INSTANCES, replace=False)gt_class_ids = gt_class_ids[ids]gt_boxes = gt_boxes[ids]gt_masks = gt_masks[:, :, ids]# 初始化用于训练的内容if b == 0:batch_image_meta = np.zeros((batch_size,) + image_meta.shape, dtype=image_meta.dtype)batch_rpn_match = np.zeros([batch_size, anchors.shape[0], 1], dtype=rpn_match.dtype)batch_rpn_bbox = np.zeros([batch_size, config.RPN_TRAIN_ANCHORS_PER_IMAGE, 4], dtype=rpn_bbox.dtype)batch_images = np.zeros((batch_size,) + image.shape, dtype=np.float32)batch_gt_class_ids = np.zeros((batch_size, config.MAX_GT_INSTANCES), dtype=np.int32)batch_gt_boxes = np.zeros((batch_size, config.MAX_GT_INSTANCES, 4), dtype=np.int32)batch_gt_masks = np.zeros((batch_size, gt_masks.shape[0], gt_masks.shape[1],config.MAX_GT_INSTANCES), dtype=gt_masks.dtype)# Add to batchbatch_image_meta[b] = image_metabatch_rpn_match[b] = rpn_match[:, np.newaxis]batch_rpn_bbox[b] = rpn_bboxbatch_images[b] = utils.mold_image(image.astype(np.float32), config)batch_gt_class_ids[b, :gt_class_ids.shape[0]] = gt_class_idsbatch_gt_boxes[b, :gt_boxes.shape[0]] = gt_boxesbatch_gt_masks[b, :, :, :gt_masks.shape[-1]] = gt_masksb += 1# Batch full?if b >= batch_size:inputs = [batch_images, batch_image_meta, batch_rpn_match, batch_rpn_bbox,batch_gt_class_ids, batch_gt_boxes, batch_gt_masks]outputs = []yield inputs, outputs# start a new batchb = 0mrcnn.py
from keras.layers import Input,ZeroPadding2D,Conv2D,MaxPooling2D,BatchNormalization,Activation,UpSampling2D,Add,Lambda,Concatenate
from keras.layers import Reshape,TimeDistributed,Dense,Conv2DTranspose
from keras.models import Model
import keras.backend as K
from nets.resnet import get_resnet
from nets.layers import ProposalLayer,PyramidROIAlign,DetectionLayer,DetectionTargetLayer
from nets.mrcnn_training import *
from utils.anchors import get_anchors
from utils.utils import norm_boxes_graph,parse_image_meta_graph
import tensorflow as tf
import numpy as np'''
TimeDistributed:
对FPN网络输出的多层卷积特征进行共享参数。
TimeDistributed的意义在于使不同层的特征图共享权重。
'''
#------------------------------------#
# 五个不同大小的特征层会传入到
# RPN当中,获得建议框
#------------------------------------#
def rpn_graph(feature_map, anchors_per_location):shared = Conv2D(512, (3, 3), padding='same', activation='relu',name='rpn_conv_shared')(feature_map)x = Conv2D(2 * anchors_per_location, (1, 1), padding='valid',activation='linear', name='rpn_class_raw')(shared)# batch_size,num_anchors,2# 代表这个先验框对应的类rpn_class_logits = Reshape([-1,2])(x)rpn_probs = Activation("softmax", name="rpn_class_xxx")(rpn_class_logits)x = Conv2D(anchors_per_location * 4, (1, 1), padding="valid",activation='linear', name='rpn_bbox_pred')(shared)# batch_size,num_anchors,4# 这个先验框的调整参数rpn_bbox = Reshape([-1,4])(x)return [rpn_class_logits, rpn_probs, rpn_bbox]#------------------------------------#
# 建立建议框网络模型
# RPN模型
#------------------------------------#
def build_rpn_model(anchors_per_location, depth):input_feature_map = Input(shape=[None, None, depth],name="input_rpn_feature_map")outputs = rpn_graph(input_feature_map, anchors_per_location)return Model([input_feature_map], outputs, name="rpn_model")#------------------------------------#
# 建立classifier模型
# 这个模型的预测结果会调整建议框
# 获得最终的预测框
#------------------------------------#
def fpn_classifier_graph(rois, feature_maps, image_meta,pool_size, num_classes, train_bn=True,fc_layers_size=1024):# ROI Pooling,利用建议框在特征层上进行截取# Shape: [batch, num_rois, POOL_SIZE, POOL_SIZE, channels]x = PyramidROIAlign([pool_size, pool_size],name="roi_align_classifier")([rois, image_meta] + feature_maps)# Shape: [batch, num_rois, 1, 1, fc_layers_size],相当于两次全连接x = TimeDistributed(Conv2D(fc_layers_size, (pool_size, pool_size), padding="valid"),name="mrcnn_class_conv1")(x)x = TimeDistributed(BatchNormalization(), name='mrcnn_class_bn1')(x, training=train_bn)x = Activation('relu')(x)# Shape: [batch, num_rois, 1, 1, fc_layers_size]x = TimeDistributed(Conv2D(fc_layers_size, (1, 1)),name="mrcnn_class_conv2")(x)x = TimeDistributed(BatchNormalization(), name='mrcnn_class_bn2')(x, training=train_bn)x = Activation('relu')(x)# Shape: [batch, num_rois, fc_layers_size]shared = Lambda(lambda x: K.squeeze(K.squeeze(x, 3), 2),name="pool_squeeze")(x)# Classifier head# 这个的预测结果代表这个先验框内部的物体的种类mrcnn_class_logits = TimeDistributed(Dense(num_classes),name='mrcnn_class_logits')(shared)mrcnn_probs = TimeDistributed(Activation("softmax"),name="mrcnn_class")(mrcnn_class_logits)# BBox head# 这个的预测结果会对先验框进行调整# [batch, num_rois, NUM_CLASSES * (dy, dx, log(dh), log(dw))]x = TimeDistributed(Dense(num_classes * 4, activation='linear'),name='mrcnn_bbox_fc')(shared)# Reshape to [batch, num_rois, NUM_CLASSES, (dy, dx, log(dh), log(dw))]mrcnn_bbox = Reshape((-1, num_classes, 4), name="mrcnn_bbox")(x)return mrcnn_class_logits, mrcnn_probs, mrcnn_bboxdef build_fpn_mask_graph(rois, feature_maps, image_meta,pool_size, num_classes, train_bn=True):# ROI Align,利用建议框在特征层上进行截取# Shape: [batch, num_rois, MASK_POOL_SIZE, MASK_POOL_SIZE, channels]x = PyramidROIAlign([pool_size, pool_size],name="roi_align_mask")([rois, image_meta] + feature_maps)# Shape: [batch, num_rois, MASK_POOL_SIZE, MASK_POOL_SIZE, channels]x = TimeDistributed(Conv2D(256, (3, 3), padding="same"),name="mrcnn_mask_conv1")(x)x = TimeDistributed(BatchNormalization(),name='mrcnn_mask_bn1')(x, training=train_bn)x = Activation('relu')(x)# Shape: [batch, num_rois, MASK_POOL_SIZE, MASK_POOL_SIZE, channels]x = TimeDistributed(Conv2D(256, (3, 3), padding="same"),name="mrcnn_mask_conv2")(x)x = TimeDistributed(BatchNormalization(),name='mrcnn_mask_bn2')(x, training=train_bn)x = Activation('relu')(x)# Shape: [batch, num_rois, MASK_POOL_SIZE, MASK_POOL_SIZE, channels]x = TimeDistributed(Conv2D(256, (3, 3), padding="same"),name="mrcnn_mask_conv3")(x)x = TimeDistributed(BatchNormalization(),name='mrcnn_mask_bn3')(x, training=train_bn)x = Activation('relu')(x)# Shape: [batch, num_rois, MASK_POOL_SIZE, MASK_POOL_SIZE, channels]x = TimeDistributed(Conv2D(256, (3, 3), padding="same"),name="mrcnn_mask_conv4")(x)x = TimeDistributed(BatchNormalization(),name='mrcnn_mask_bn4')(x, training=train_bn)x = Activation('relu')(x)# Shape: [batch, num_rois, 2xMASK_POOL_SIZE, 2xMASK_POOL_SIZE, channels]x = TimeDistributed(Conv2DTranspose(256, (2, 2), strides=2, activation="relu"),name="mrcnn_mask_deconv")(x)# 反卷积后再次进行一个1x1卷积调整通道,使其最终数量为numclasses,代表分的类x = TimeDistributed(Conv2D(num_classes, (1, 1), strides=1, activation="sigmoid"),name="mrcnn_mask")(x)return xdef get_predict_model(config):h, w = config.IMAGE_SHAPE[:2]if h / 2**6 != int(h / 2**6) or w / 2**6 != int(w / 2**6):raise Exception("Image size must be dividable by 2 at least 6 times ""to avoid fractions when downscaling and upscaling.""For example, use 256, 320, 384, 448, 512, ... etc. ")# 输入进来的图片必须是2的6次方以上的倍数input_image = Input(shape=[None, None, config.IMAGE_SHAPE[2]], name="input_image")# meta包含了一些必要信息input_image_meta = Input(shape=[config.IMAGE_META_SIZE],name="input_image_meta")# 输入进来的先验框input_anchors = Input(shape=[None, 4], name="input_anchors")# 获得Resnet里的压缩程度不同的一些层_, C2, C3, C4, C5 = get_resnet(input_image, stage5=True, train_bn=config.TRAIN_BN)# 组合成特征金字塔的结构# P5长宽共压缩了5次# Height/32,Width/32,256P5 = Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (1, 1), name='fpn_c5p5')(C5)# P4长宽共压缩了4次# Height/16,Width/16,256P4 = Add(name="fpn_p4add")([UpSampling2D(size=(2, 2), name="fpn_p5upsampled")(P5),Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (1, 1), name='fpn_c4p4')(C4)])# P4长宽共压缩了3次# Height/8,Width/8,256P3 = Add(name="fpn_p3add")([UpSampling2D(size=(2, 2), name="fpn_p4upsampled")(P4),Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (1, 1), name='fpn_c3p3')(C3)])# P4长宽共压缩了2次# Height/4,Width/4,256P2 = Add(name="fpn_p2add")([UpSampling2D(size=(2, 2), name="fpn_p3upsampled")(P3),Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (1, 1), name='fpn_c2p2')(C2)])# 各自进行一次256通道的卷积,此时P2、P3、P4、P5通道数相同# Height/4,Width/4,256P2 = Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (3, 3), padding="SAME", name="fpn_p2")(P2)# Height/8,Width/8,256P3 = Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (3, 3), padding="SAME", name="fpn_p3")(P3)# Height/16,Width/16,256P4 = Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (3, 3), padding="SAME", name="fpn_p4")(P4)# Height/32,Width/32,256P5 = Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (3, 3), padding="SAME", name="fpn_p5")(P5)# 在建议框网络里面还有一个P6用于获取建议框# Height/64,Width/64,256P6 = MaxPooling2D(pool_size=(1, 1), strides=2, name="fpn_p6")(P5)# P2, P3, P4, P5, P6可以用于获取建议框rpn_feature_maps = [P2, P3, P4, P5, P6]# P2, P3, P4, P5用于获取mask信息mrcnn_feature_maps = [P2, P3, P4, P5]anchors = input_anchors# 建立RPN模型rpn = build_rpn_model(len(config.RPN_ANCHOR_RATIOS), config.TOP_DOWN_PYRAMID_SIZE)rpn_class_logits, rpn_class, rpn_bbox = [],[],[]# 获得RPN网络的预测结果,进行格式调整,把五个特征层的结果进行堆叠for p in rpn_feature_maps:logits,classes,bbox = rpn([p])rpn_class_logits.append(logits)rpn_class.append(classes)rpn_bbox.append(bbox)rpn_class_logits = Concatenate(axis=1,name="rpn_class_logits")(rpn_class_logits)rpn_class = Concatenate(axis=1,name="rpn_class")(rpn_class)rpn_bbox = Concatenate(axis=1,name="rpn_bbox")(rpn_bbox)# 此时获得的rpn_class_logits、rpn_class、rpn_bbox的维度是# rpn_class_logits : Batch_size, num_anchors, 2# rpn_class : Batch_size, num_anchors, 2# rpn_bbox : Batch_size, num_anchors, 4proposal_count = config.POST_NMS_ROIS_INFERENCE# Batch_size, proposal_count, 4# 对先验框进行解码rpn_rois = ProposalLayer(proposal_count=proposal_count,nms_threshold=config.RPN_NMS_THRESHOLD,name="ROI",config=config)([rpn_class, rpn_bbox, anchors])# 获得classifier的结果mrcnn_class_logits, mrcnn_class, mrcnn_bbox =\fpn_classifier_graph(rpn_rois, mrcnn_feature_maps, input_image_meta,config.POOL_SIZE, config.NUM_CLASSES,train_bn=config.TRAIN_BN,fc_layers_size=config.FPN_CLASSIF_FC_LAYERS_SIZE)detections = DetectionLayer(config, name="mrcnn_detection")([rpn_rois, mrcnn_class, mrcnn_bbox, input_image_meta])detection_boxes = Lambda(lambda x: x[..., :4])(detections)# 获得mask的结果mrcnn_mask = build_fpn_mask_graph(detection_boxes, mrcnn_feature_maps,input_image_meta,config.MASK_POOL_SIZE,config.NUM_CLASSES,train_bn=config.TRAIN_BN)# 作为输出model = Model([input_image, input_image_meta, input_anchors],[detections, mrcnn_class, mrcnn_bbox,mrcnn_mask, rpn_rois, rpn_class, rpn_bbox],name='mask_rcnn')return modeldef get_train_model(config):h, w = config.IMAGE_SHAPE[:2]if h / 2**6 != int(h / 2**6) or w / 2**6 != int(w / 2**6):raise Exception("Image size must be dividable by 2 at least 6 times ""to avoid fractions when downscaling and upscaling.""For example, use 256, 320, 384, 448, 512, ... etc. ")# 输入进来的图片必须是2的6次方以上的倍数input_image = Input(shape=[None, None, config.IMAGE_SHAPE[2]], name="input_image")# meta包含了一些必要信息input_image_meta = Input(shape=[config.IMAGE_META_SIZE],name="input_image_meta")# RPN建议框网络的真实框信息input_rpn_match = Input(shape=[None, 1], name="input_rpn_match", dtype=tf.int32)input_rpn_bbox = Input(shape=[None, 4], name="input_rpn_bbox", dtype=tf.float32)# 种类信息input_gt_class_ids = Input(shape=[None], name="input_gt_class_ids", dtype=tf.int32)# 框的位置信息input_gt_boxes = Input(shape=[None, 4], name="input_gt_boxes", dtype=tf.float32)# 标准化到0-1之间gt_boxes = Lambda(lambda x: norm_boxes_graph(x, K.shape(input_image)[1:3]))(input_gt_boxes)# mask语义分析信息# [batch, height, width, MAX_GT_INSTANCES]if config.USE_MINI_MASK:input_gt_masks = Input(shape=[config.MINI_MASK_SHAPE[0],config.MINI_MASK_SHAPE[1], None],name="input_gt_masks", dtype=bool)else:input_gt_masks = Input(shape=[config.IMAGE_SHAPE[0], config.IMAGE_SHAPE[1], None],name="input_gt_masks", dtype=bool)# 获得Resnet里的压缩程度不同的一些层_, C2, C3, C4, C5 = get_resnet(input_image, stage5=True, train_bn=config.TRAIN_BN)# 组合成特征金字塔的结构# P5长宽共压缩了5次# Height/32,Width/32,256P5 = Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (1, 1), name='fpn_c5p5')(C5)# P4长宽共压缩了4次# Height/16,Width/16,256P4 = Add(name="fpn_p4add")([UpSampling2D(size=(2, 2), name="fpn_p5upsampled")(P5),Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (1, 1), name='fpn_c4p4')(C4)])# P4长宽共压缩了3次# Height/8,Width/8,256P3 = Add(name="fpn_p3add")([UpSampling2D(size=(2, 2), name="fpn_p4upsampled")(P4),Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (1, 1), name='fpn_c3p3')(C3)])# P4长宽共压缩了2次# Height/4,Width/4,256P2 = Add(name="fpn_p2add")([UpSampling2D(size=(2, 2), name="fpn_p3upsampled")(P3),Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (1, 1), name='fpn_c2p2')(C2)])# 各自进行一次256通道的卷积,此时P2、P3、P4、P5通道数相同# Height/4,Width/4,256P2 = Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (3, 3), padding="SAME", name="fpn_p2")(P2)# Height/8,Width/8,256P3 = Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (3, 3), padding="SAME", name="fpn_p3")(P3)# Height/16,Width/16,256P4 = Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (3, 3), padding="SAME", name="fpn_p4")(P4)# Height/32,Width/32,256P5 = Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (3, 3), padding="SAME", name="fpn_p5")(P5)# 在建议框网络里面还有一个P6用于获取建议框# Height/64,Width/64,256P6 = MaxPooling2D(pool_size=(1, 1), strides=2, name="fpn_p6")(P5)# P2, P3, P4, P5, P6可以用于获取建议框rpn_feature_maps = [P2, P3, P4, P5, P6]# P2, P3, P4, P5用于获取mask信息mrcnn_feature_maps = [P2, P3, P4, P5]anchors = get_anchors(config,config.IMAGE_SHAPE)# 拓展anchors的shape,第一个维度拓展为batch_sizeanchors = np.broadcast_to(anchors, (config.BATCH_SIZE,) + anchors.shape)# 将anchors转化成tensor的形式anchors = Lambda(lambda x: tf.Variable(anchors), name="anchors")(input_image)# 建立RPN模型rpn = build_rpn_model(len(config.RPN_ANCHOR_RATIOS), config.TOP_DOWN_PYRAMID_SIZE)rpn_class_logits, rpn_class, rpn_bbox = [],[],[]# 获得RPN网络的预测结果,进行格式调整,把五个特征层的结果进行堆叠for p in rpn_feature_maps:logits,classes,bbox = rpn([p])rpn_class_logits.append(logits)rpn_class.append(classes)rpn_bbox.append(bbox)rpn_class_logits = Concatenate(axis=1,name="rpn_class_logits")(rpn_class_logits)rpn_class = Concatenate(axis=1,name="rpn_class")(rpn_class)rpn_bbox = Concatenate(axis=1,name="rpn_bbox")(rpn_bbox)# 此时获得的rpn_class_logits、rpn_class、rpn_bbox的维度是# rpn_class_logits : Batch_size, num_anchors, 2# rpn_class : Batch_size, num_anchors, 2# rpn_bbox : Batch_size, num_anchors, 4proposal_count = config.POST_NMS_ROIS_TRAINING# Batch_size, proposal_count, 4rpn_rois = ProposalLayer(proposal_count=proposal_count,nms_threshold=config.RPN_NMS_THRESHOLD,name="ROI",config=config)([rpn_class, rpn_bbox, anchors])active_class_ids = Lambda(lambda x: parse_image_meta_graph(x)["active_class_ids"])(input_image_meta)if not config.USE_RPN_ROIS:# 使用外部输入的建议框input_rois = Input(shape=[config.POST_NMS_ROIS_TRAINING, 4],name="input_roi", dtype=np.int32)# Normalize coordinatestarget_rois = Lambda(lambda x: norm_boxes_graph(x, K.shape(input_image)[1:3]))(input_rois)else:# 利用预测到的建议框进行下一步的操作target_rois = rpn_rois"""找到建议框的ground_truthInputs:proposals: [batch, N, (y1, x1, y2, x2)]建议框gt_class_ids: [batch, MAX_GT_INSTANCES]每个真实框对应的类gt_boxes: [batch, MAX_GT_INSTANCES, (y1, x1, y2, x2)]真实框的位置gt_masks: [batch, height, width, MAX_GT_INSTANCES]真实框的语义分割情况Returns: rois: [batch, TRAIN_ROIS_PER_IMAGE, (y1, x1, y2, x2)]内部真实存在目标的建议框target_class_ids: [batch, TRAIN_ROIS_PER_IMAGE]每个建议框对应的类target_deltas: [batch, TRAIN_ROIS_PER_IMAGE, (dy, dx, log(dh), log(dw)]每个建议框应该有的调整参数target_mask: [batch, TRAIN_ROIS_PER_IMAGE, height, width]每个建议框语义分割情况"""rois, target_class_ids, target_bbox, target_mask =\DetectionTargetLayer(config, name="proposal_targets")([target_rois, input_gt_class_ids, gt_boxes, input_gt_masks])# 找到合适的建议框的classifier预测结果mrcnn_class_logits, mrcnn_class, mrcnn_bbox =\fpn_classifier_graph(rois, mrcnn_feature_maps, input_image_meta,config.POOL_SIZE, config.NUM_CLASSES,train_bn=config.TRAIN_BN,fc_layers_size=config.FPN_CLASSIF_FC_LAYERS_SIZE)# 找到合适的建议框的mask预测结果mrcnn_mask = build_fpn_mask_graph(rois, mrcnn_feature_maps,input_image_meta,config.MASK_POOL_SIZE,config.NUM_CLASSES,train_bn=config.TRAIN_BN)output_rois = Lambda(lambda x: x * 1, name="output_rois")(rois)# Lossesrpn_class_loss = Lambda(lambda x: rpn_class_loss_graph(*x), name="rpn_class_loss")([input_rpn_match, rpn_class_logits])rpn_bbox_loss = Lambda(lambda x: rpn_bbox_loss_graph(config, *x), name="rpn_bbox_loss")([input_rpn_bbox, input_rpn_match, rpn_bbox])class_loss = Lambda(lambda x: mrcnn_class_loss_graph(*x), name="mrcnn_class_loss")([target_class_ids, mrcnn_class_logits, active_class_ids])bbox_loss = Lambda(lambda x: mrcnn_bbox_loss_graph(*x), name="mrcnn_bbox_loss")([target_bbox, target_class_ids, mrcnn_bbox])mask_loss = Lambda(lambda x: mrcnn_mask_loss_graph(*x), name="mrcnn_mask_loss")([target_mask, target_class_ids, mrcnn_mask])# Modelinputs = [input_image, input_image_meta,input_rpn_match, input_rpn_bbox, input_gt_class_ids, input_gt_boxes, input_gt_masks]if not config.USE_RPN_ROIS:inputs.append(input_rois)outputs = [rpn_class_logits, rpn_class, rpn_bbox,mrcnn_class_logits, mrcnn_class, mrcnn_bbox, mrcnn_mask,rpn_rois, output_rois,rpn_class_loss, rpn_bbox_loss, class_loss, bbox_loss, mask_loss]model = Model(inputs, outputs, name='mask_rcnn')return modelresnet.py
from keras.layers import ZeroPadding2D,Conv2D,MaxPooling2D,BatchNormalization,Activation,Adddef identity_block(input_tensor, kernel_size, filters, stage, block,use_bias=True, train_bn=True):nb_filter1, nb_filter2, nb_filter3 = filtersconv_name_base = 'res' + str(stage) + block + '_branch'bn_name_base = 'bn' + str(stage) + block + '_branch'x = Conv2D(nb_filter1, (1, 1), name=conv_name_base + '2a',use_bias=use_bias)(input_tensor)x = BatchNormalization(name=bn_name_base + '2a')(x, training=train_bn)x = Activation('relu')(x)x = Conv2D(nb_filter2, (kernel_size, kernel_size), padding='same',name=conv_name_base + '2b', use_bias=use_bias)(x)x = BatchNormalization(name=bn_name_base + '2b')(x, training=train_bn)x = Activation('relu')(x)x = Conv2D(nb_filter3, (1, 1), name=conv_name_base + '2c',use_bias=use_bias)(x)x = BatchNormalization(name=bn_name_base + '2c')(x, training=train_bn)x = Add()([x, input_tensor])x = Activation('relu', name='res' + str(stage) + block + '_out')(x)return xdef conv_block(input_tensor, kernel_size, filters, stage, block,strides=(2, 2), use_bias=True, train_bn=True):nb_filter1, nb_filter2, nb_filter3 = filtersconv_name_base = 'res' + str(stage) + block + '_branch'bn_name_base = 'bn' + str(stage) + block + '_branch'x = Conv2D(nb_filter1, (1, 1), strides=strides,name=conv_name_base + '2a', use_bias=use_bias)(input_tensor)x = BatchNormalization(name=bn_name_base + '2a')(x, training=train_bn)x = Activation('relu')(x)x = Conv2D(nb_filter2, (kernel_size, kernel_size), padding='same',name=conv_name_base + '2b', use_bias=use_bias)(x)x = BatchNormalization(name=bn_name_base + '2b')(x, training=train_bn)x = Activation('relu')(x)x = Conv2D(nb_filter3, (1, 1), name=conv_name_base +'2c', use_bias=use_bias)(x)x = BatchNormalization(name=bn_name_base + '2c')(x, training=train_bn)shortcut = Conv2D(nb_filter3, (1, 1), strides=strides,name=conv_name_base + '1', use_bias=use_bias)(input_tensor)shortcut = BatchNormalization(name=bn_name_base + '1')(shortcut, training=train_bn)x = Add()([x, shortcut])x = Activation('relu', name='res' + str(stage) + block + '_out')(x)return xdef get_resnet(input_image,stage5=False, train_bn=True):# Stage 1x = ZeroPadding2D((3, 3))(input_image)x = Conv2D(64, (7, 7), strides=(2, 2), name='conv1', use_bias=True)(x)x = BatchNormalization(name='bn_conv1')(x, training=train_bn)x = Activation('relu')(x)# Height/4,Width/4,64C1 = x = MaxPooling2D((3, 3), strides=(2, 2), padding="same")(x)# Stage 2x = conv_block(x, 3, [64, 64, 256], stage=2, block='a', strides=(1, 1), train_bn=train_bn)x = identity_block(x, 3, [64, 64, 256], stage=2, block='b', train_bn=train_bn)# Height/4,Width/4,256C2 = x = identity_block(x, 3, [64, 64, 256], stage=2, block='c', train_bn=train_bn)# Stage 3x = conv_block(x, 3, [128, 128, 512], stage=3, block='a', train_bn=train_bn)x = identity_block(x, 3, [128, 128, 512], stage=3, block='b', train_bn=train_bn)x = identity_block(x, 3, [128, 128, 512], stage=3, block='c', train_bn=train_bn)# Height/8,Width/8,512C3 = x = identity_block(x, 3, [128, 128, 512], stage=3, block='d', train_bn=train_bn)# Stage 4x = conv_block(x, 3, [256, 256, 1024], stage=4, block='a', train_bn=train_bn)block_count = 22for i in range(block_count):x = identity_block(x, 3, [256, 256, 1024], stage=4, block=chr(98 + i), train_bn=train_bn)# Height/16,Width/16,1024C4 = x# Stage 5if stage5:x = conv_block(x, 3, [512, 512, 2048], stage=5, block='a', train_bn=train_bn)x = identity_block(x, 3, [512, 512, 2048], stage=5, block='b', train_bn=train_bn)# Height/32,Width/32,2048C5 = x = identity_block(x, 3, [512, 512, 2048], stage=5, block='c', train_bn=train_bn)else:C5 = Nonereturn [C1, C2, C3, C4, C5]5.2 mask_rcnn.py
import os
import sys
import random
import math
import numpy as np
import skimage.io
from PIL import Image
import matplotlib
import matplotlib.pyplot as plt
from nets.mrcnn import get_predict_model
from utils.config import Config
from utils.anchors import get_anchors
from utils.utils import mold_inputs,unmold_detections
from utils import visualize
import keras.backend as K
class MASK_RCNN(object):_defaults = {"model_path": 'model_data/mask_rcnn_coco.h5',"classes_path": 'model_data/coco_classes.txt',"confidence": 0.7,# 使用coco数据集检测的时候,IMAGE_MIN_DIM=1024,IMAGE_MAX_DIM=1024, RPN_ANCHOR_SCALES=(32, 64, 128, 256, 512)"RPN_ANCHOR_SCALES": (32, 64, 128, 256, 512),"IMAGE_MIN_DIM": 1024,"IMAGE_MAX_DIM": 1024,# 在使用自己的数据集进行训练的时候,如果显存不足要调小图片大小# 同时要调小anchors#"IMAGE_MIN_DIM": 512,#"IMAGE_MAX_DIM": 512,#"RPN_ANCHOR_SCALES": (16, 32, 64, 128, 256)}@classmethoddef get_defaults(cls, n):if n in cls._defaults:return cls._defaults[n]else:return "Unrecognized attribute name '" + n + "'"#---------------------------------------------------## 初始化Mask-Rcnn#---------------------------------------------------#def __init__(self, **kwargs):self.__dict__.update(self._defaults)self.class_names = self._get_class()self.sess = K.get_session()self.config = self._get_config()self.generate()#---------------------------------------------------## 获得所有的分类#---------------------------------------------------#def _get_class(self):classes_path = os.path.expanduser(self.classes_path)with open(classes_path) as f:class_names = f.readlines()class_names = [c.strip() for c in class_names]class_names.insert(0,"BG")return class_namesdef _get_config(self):class InferenceConfig(Config):NUM_CLASSES = len(self.class_names)GPU_COUNT = 1IMAGES_PER_GPU = 1DETECTION_MIN_CONFIDENCE = self.confidenceNAME = "shapes"RPN_ANCHOR_SCALES = self.RPN_ANCHOR_SCALESIMAGE_MIN_DIM = self.IMAGE_MIN_DIMIMAGE_MAX_DIM = self.IMAGE_MAX_DIMconfig = InferenceConfig()config.display()return config#---------------------------------------------------## 生成模型#---------------------------------------------------#def generate(self):model_path = os.path.expanduser(self.model_path)assert model_path.endswith('.h5'), 'Keras model or weights must be a .h5 file.'# 计算总的种类self.num_classes = len(self.class_names)# 载入模型,如果原来的模型里已经包括了模型结构则直接载入。# 否则先构建模型再载入self.model = get_predict_model(self.config)self.model.load_weights(self.model_path,by_name=True)#---------------------------------------------------## 检测图片#---------------------------------------------------#def detect_image(self, image):image = [np.array(image)]molded_images, image_metas, windows = mold_inputs(self.config,image)image_shape = molded_images[0].shapeanchors = get_anchors(self.config,image_shape)anchors = np.broadcast_to(anchors, (1,) + anchors.shape)detections, _, _, mrcnn_mask, _, _, _ =\self.model.predict([molded_images, image_metas, anchors], verbose=0)final_rois, final_class_ids, final_scores, final_masks =\unmold_detections(detections[0], mrcnn_mask[0],image[0].shape, molded_images[0].shape,windows[0])r = {"rois": final_rois,"class_ids": final_class_ids,"scores": final_scores,"masks": final_masks,}visualize.display_instances(image[0], r['rois'], r['masks'], r['class_ids'], self.class_names, r['scores'])def close_session(self):self.sess.close()
5.3 train.py
import os
from PIL import Image
import keras
import numpy as np
import randomimport tensorflow as tf
from utils import visualize
from utils.config import Config
from utils.anchors import get_anchors
from utils.utils import mold_inputs,unmold_detections
from nets.mrcnn import get_train_model,get_predict_model
from nets.mrcnn_training import data_generator,load_image_gt
from dataset import ShapesDatasetdef log(text, array=None):"""Prints a text message. And, optionally, if a Numpy array is provided itprints it's shape, min, and max values."""if array is not None:text = text.ljust(25)text += ("shape: {:20} ".format(str(array.shape)))if array.size:text += ("min: {:10.5f} max: {:10.5f}".format(array.min(),array.max()))else:text += ("min: {:10} max: {:10}".format("",""))text += " {}".format(array.dtype)print(text)class ShapesConfig(Config):NAME = "shapes"GPU_COUNT = 1IMAGES_PER_GPU = 1BATCH_SIZE = 1NUM_CLASSES = 1 + 3RPN_ANCHOR_SCALES = (16, 32, 64, 128, 256)IMAGE_MIN_DIM = 512IMAGE_MAX_DIM = 512STEPS_PER_EPOCH = 250VALIDATION_STEPS = 25if __name__ == "__main__":learning_rate = 1e-5init_epoch = 0epoch = 100dataset_root_path="./train_dataset/"img_floder = dataset_root_path + "imgs/"mask_floder = dataset_root_path + "mask/"yaml_floder = dataset_root_path + "yaml/"imglist = os.listdir(img_floder)count = len(imglist)np.random.seed(10101)np.random.shuffle(imglist)train_imglist = imglist[:int(count*0.9)]val_imglist = imglist[int(count*0.9):]MODEL_DIR = "logs"COCO_MODEL_PATH = "model_data/mask_rcnn_coco.h5"config = ShapesConfig()config.display()# 训练数据集准备dataset_train = ShapesDataset()dataset_train.load_shapes(len(train_imglist), img_floder, mask_floder, train_imglist, yaml_floder)dataset_train.prepare()# 验证数据集准备dataset_val = ShapesDataset()dataset_val.load_shapes(len(val_imglist), img_floder, mask_floder, val_imglist, yaml_floder)dataset_val.prepare()# 获得训练模型model = get_train_model(config)model.load_weights(COCO_MODEL_PATH,by_name=True,skip_mismatch=True)# 数据生成器train_generator = data_generator(dataset_train, config, shuffle=True,batch_size=config.BATCH_SIZE)val_generator = data_generator(dataset_val, config, shuffle=True,batch_size=config.BATCH_SIZE)# 回执函数# 每次训练一个世代都会保存callbacks = [keras.callbacks.TensorBoard(log_dir=MODEL_DIR,histogram_freq=0, write_graph=True, write_images=False),keras.callbacks.ModelCheckpoint(os.path.join(MODEL_DIR, "epoch{epoch:03d}_loss{loss:.3f}_val_loss{val_loss:.3f}.h5"),verbose=0, save_weights_only=True),]log("\nStarting at epoch {}. LR={}\n".format(init_epoch, learning_rate))log("Checkpoint Path: {}".format(MODEL_DIR))# 使用的优化器是optimizer = keras.optimizers.Adam(lr=learning_rate)# 设置一下loss信息model._losses = []model._per_input_losses = {}loss_names = ["rpn_class_loss", "rpn_bbox_loss","mrcnn_class_loss", "mrcnn_bbox_loss", "mrcnn_mask_loss"]for name in loss_names:layer = model.get_layer(name)if layer.output in model.losses:continueloss = (tf.reduce_mean(layer.output, keepdims=True)* config.LOSS_WEIGHTS.get(name, 1.))model.add_loss(loss)# 增加L2正则化,放置过拟合reg_losses = [keras.regularizers.l2(config.WEIGHT_DECAY)(w) / tf.cast(tf.size(w), tf.float32)for w in model.trainable_weightsif 'gamma' not in w.name and 'beta' not in w.name]model.add_loss(tf.add_n(reg_losses))# 进行编译model.compile(optimizer=optimizer,loss=[None] * len(model.outputs))# 用于显示训练情况for name in loss_names:if name in model.metrics_names:print(name)continuelayer = model.get_layer(name)model.metrics_names.append(name)loss = (tf.reduce_mean(layer.output, keepdims=True)* config.LOSS_WEIGHTS.get(name, 1.))model.metrics_tensors.append(loss)model.fit_generator(train_generator,initial_epoch=init_epoch,epochs=epoch,steps_per_epoch=config.STEPS_PER_EPOCH,callbacks=callbacks,validation_data=val_generator,validation_steps=config.VALIDATION_STEPS,max_queue_size=100)5.4 predict.py
from keras.layers import Input
from mask_rcnn import MASK_RCNN
from PIL import Imagemask_rcnn = MASK_RCNN()while True:img = input('img/street.jpg')try:image = Image.open('img/street.jpg')except:print('Open Error! Try again!')continueelse:mask_rcnn.detect_image(image)
mask_rcnn.close_session()相关文章:
计算机视觉 -- 图像分割
文章目录 1. 图像分割2. FCN2.1 语义分割– FCN (Fully Convolutional Networks)2.2 FCN--deconv2.3 Unpool2.4 拓展–DeconvNet 3. 实例分割3.1 实例分割--Mask R-CNN3.2 Mask R-CNN3.3 Faster R-CNN与 Mask R-CNN3.4 Mask R-CNN:Resnet1013…...

ubuntu18.04复现yolo v8之CUDA与pytorch版本问题以及多CUDA版本安装及切换
最近在复现yolo v8的程序,特记录一下过程 环境:ubuntu18.04ros melodic 小知识:GPU并行计算能力高于CPU—B站UP主说的 Ubuntu可以安装多个版本的CUDA。如果某个程序的Pyorch需要不同版本的CUDA,不必删除之前的CUDA,…...

Redis三种模式——主从复制,哨兵模式,集群
目录 一、主从复制 1.1主从复制的概念 1.2Redis主从复制作用 1.2.1数据冗余 1.2.2故障恢复 1.2.3负载均衡 1.2.4高可用基石 1.3Redis主从复制流程 1.4部署Redis 主从复制 1.4.1.环境部署 1.4.2.所有服务器都先关闭防火墙 1.4.3.所有服务器都安装Redis 1.4.4修改Master主节点R…...

mysql8.0.31新增只读远程普通用户
在 MySQL 8.0.31 中,可以通过以下步骤新增只读远程普通用户: 1、使用 root 用户登录 MySQL 数据库。 mysql -u root -p 2、创建用户: CREATE USER username% IDENTIFIED WITH mysql_native_password BY password ; 其中,username…...

揭开路由协议隐藏的风险
路由协议在互联网和基于其的服务的运行中发挥着至关重要的作用。然而,许多这些协议的开发都没有考虑到安全问题。 例如,边界网关协议 (BGP) 最初并未考虑对等点之间发生攻击的可能性。过去几十年来,BGP 中的起源和路径验证已投入了大量工作。…...
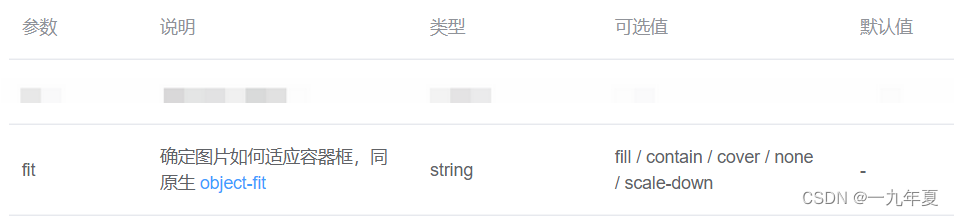
图片因固定宽高被拉伸了?object-fit:一个神奇的属性
一、问题产生的场景 近期在完成项目开发时,测试人员针对漫画长图上传后的展示提出了一个界面优化的点,因为其特点是长,但是我们展示图片的区域是固定的,如果我们按照正常思路将图片的宽高写死,确实占位大小的问题解决了…...

客户案例:中圣科技—CAC2.0防范盗号威胁,加固安全防线
客户背景 中圣科技(江苏)股份有限公司(以下简称“中圣科技”),是一家以技术研发为驱动,以清洁能源核心成套装备和节能环保工程服务为支撑的科技创新型企业。其以南京为核心运营基地,与当地政府…...

pandas数据分析40——读取 excel 合并单元格的表头
案例背景 真的很容易疯....上班的单位的表格都是不同的人做的,所以就会出现各种合并单元格的情况,要知道我们用pandas读取数据最怕合并单元格了,因为没规律...可能前几列没合并,后面几列又合并了....而且pandas对于索引很严格&am…...
Java后端开发面试题——微服务篇总结
Spring Cloud 5大组件有哪些? 随着SpringCloudAlibba在国内兴起 , 我们项目中使用了一些阿里巴巴的组件 注册中心/配置中心 Nacos 负载均衡 Ribbon 服务调用 Feign 服务保护 sentinel 服务网关 Gateway Ribbon负载均衡策略有哪些 ? RoundRobinRule&…...

第十一章MyBatis查询专题
返回单个Car 返回单个可以直接用Car接收返回参数 Car carCarMapper.getOne(100);返回多个Car 返回多个可以直接用List接收返回参数 List<Car> carCarMapper.getAll();用一个对象无法接受返回多个参数,用list可以接收返回一个参数 返回Map 如果没有合适的…...
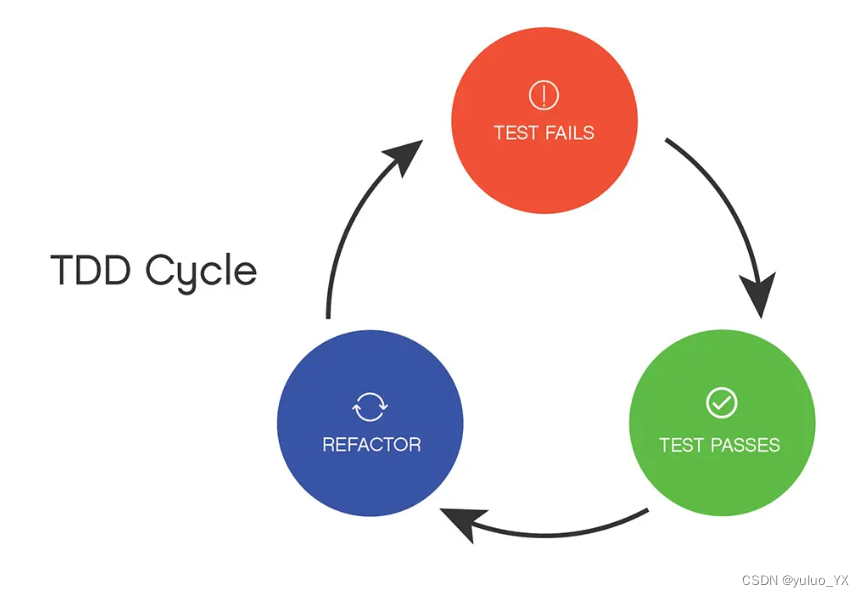
测试驱动开发(TDD)
测试驱动开发(TDD) 本篇文章简单叙述一下什么是测试驱动开发,以及怎么进行测试驱动开发! TDD (Test Driven Development):(源于极限编程(XP))在不…...
深度学习|CNN卷积神经网络
CNN卷积神经网络 解决的问题人类的视觉原理原理卷积层——提取特征池化层——数据降维全连接层——输出结果 应用图像处理自然语言处理 解决的问题 在CNN没有出现前,图像对人工智能来说非常难处理。 主要原因: 图像要处理的数据量太大了。图像由像素组…...
【洁洁送书第五期】为什么我们要了解可观测性工程
导读 可观测性已成为一个热门话题,并广受关注。随着它的普及,“可观测性”不幸被误作“监控”或“系统遥测”的同义词。可观测性是软件系统的一个特征。而且,只有当团队采用新的实践进行持续开发时,才能在生产软件系统中有效利用这…...
将vue项目通过electron打包成windows可执行程序
将vue项目打包成windows可执行程序 1、准备好dist将整个项目打包 npm run build2、安装electron依赖 npm install electron --save-dev npm install electron-packager --save-dev"electron": "^13.1.4", "electron-packager": "^15.2.0…...

【0基础入门Python Web笔记】三、python 之函数以及常用内置函数
三、python 之函数以及常用内置函数 函数函数定义函数调用函数参数返回值 常用内置函数input()函数range()函数其它 更多实战项目可进入下方官网 函数 函数是一种用于封装可重复使用代码块的工具,能够将一系列操作组织成一个逻辑单元。 函数定义 在Python中&…...
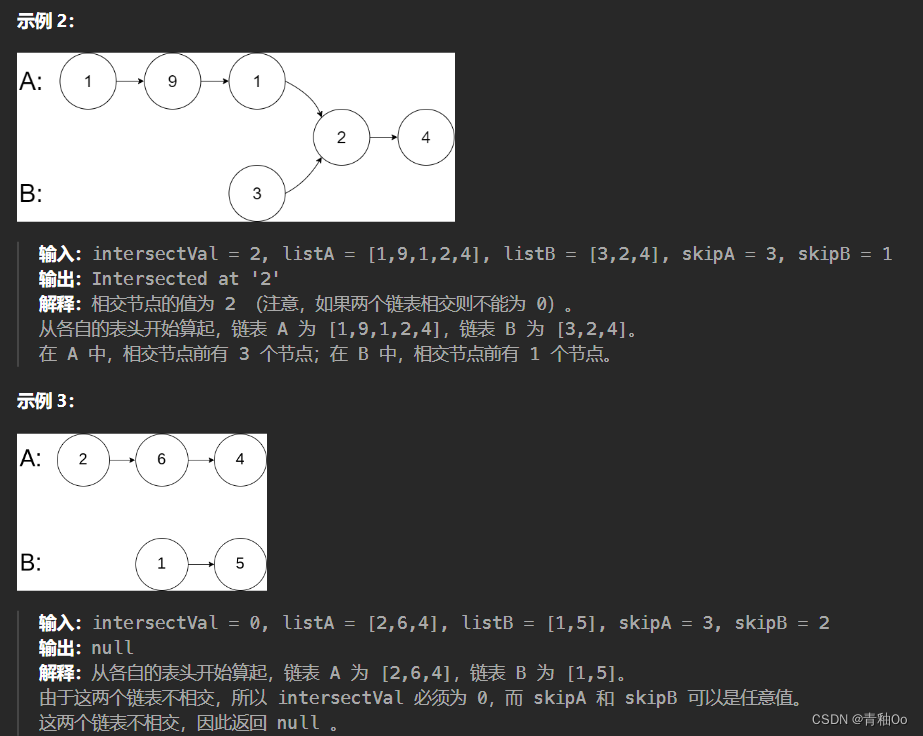
相交链表00
题目链接 相交链表 题目描述 注意点 保证 整个链式结构中不存在环函数返回结果后,链表必须 保持其原始结构如果 listA 和 listB 没有交点,intersectVal 为 0 解答思路 两个链表从头开始遍历,如果其是在同一个位置处相交,则在…...
怎样压缩mp4视频大小?
怎样压缩mp4视频大小?由于视频文件的体积通常比其他类型的文件更大,因此它们需要更多的存储空间来保存。但是,如果我们的设备、应用程序或平台不支持某些视频格式或分辨率,或者我们没有足够的存储空间来容纳这些大型视频文件&…...

ubuntu20.04 安装使用 Indemind 双目相机
1、先按照官方wiki搭建环境 Ubuntu 安装 — IMSEE SDK 1.4.2 文档(ubuntu20使用官网会报错,可以参考我下面的步骤) 1.1、获取代码 sudo apt-get install git git clone https://github.com/indemind/IMSEE-SDK.git 1.2、准备依赖 cd <…...

一文读懂设备管理系统:是什么、谁需要、怎样选
工业的迅猛发展让人类向前迈出了史无前例的步伐,工业4.0将我们又带入了一个信息化技术促进工业变革的新时代——智能化时代。一台台机器设备是工业发展史上必不可少的参与者,但企业对设备的管理存在种种痛点,比如生产设备多,但备件…...
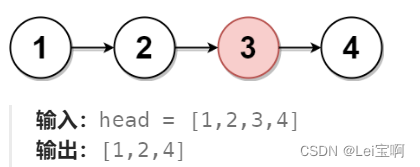
删除链表的中间节点
题目: 示例: 思路: 这个题类似于寻找链表中间的数字,slow和fast都指向head,slow走一步,fast走两步,也许你会有疑问,节点数的奇偶不考虑吗?while执行条件写成fast&&…...
label-studio的使用教程(导入本地路径)
文章目录 1. 准备环境2. 脚本启动2.1 Windows2.2 Linux 3. 安装label-studio机器学习后端3.1 pip安装(推荐)3.2 GitHub仓库安装 4. 后端配置4.1 yolo环境4.2 引入后端模型4.3 修改脚本4.4 启动后端 5. 标注工程5.1 创建工程5.2 配置图片路径5.3 配置工程类型标签5.4 配置模型5.…...
)
Java 语言特性(面试系列1)
一、面向对象编程 1. 封装(Encapsulation) 定义:将数据(属性)和操作数据的方法绑定在一起,通过访问控制符(private、protected、public)隐藏内部实现细节。示例: public …...

React hook之useRef
React useRef 详解 useRef 是 React 提供的一个 Hook,用于在函数组件中创建可变的引用对象。它在 React 开发中有多种重要用途,下面我将全面详细地介绍它的特性和用法。 基本概念 1. 创建 ref const refContainer useRef(initialValue);initialValu…...

PHP和Node.js哪个更爽?
先说结论,rust完胜。 php:laravel,swoole,webman,最开始在苏宁的时候写了几年php,当时觉得php真的是世界上最好的语言,因为当初活在舒适圈里,不愿意跳出来,就好比当初活在…...

C# SqlSugar:依赖注入与仓储模式实践
C# SqlSugar:依赖注入与仓储模式实践 在 C# 的应用开发中,数据库操作是必不可少的环节。为了让数据访问层更加简洁、高效且易于维护,许多开发者会选择成熟的 ORM(对象关系映射)框架,SqlSugar 就是其中备受…...

学校时钟系统,标准考场时钟系统,AI亮相2025高考,赛思时钟系统为教育公平筑起“精准防线”
2025年#高考 将在近日拉开帷幕,#AI 监考一度冲上热搜。当AI深度融入高考,#时间同步 不再是辅助功能,而是决定AI监考系统成败的“生命线”。 AI亮相2025高考,40种异常行为0.5秒精准识别 2025年高考即将拉开帷幕,江西、…...
springboot整合VUE之在线教育管理系统简介
可以学习到的技能 学会常用技术栈的使用 独立开发项目 学会前端的开发流程 学会后端的开发流程 学会数据库的设计 学会前后端接口调用方式 学会多模块之间的关联 学会数据的处理 适用人群 在校学生,小白用户,想学习知识的 有点基础,想要通过项…...

Go语言多线程问题
打印零与奇偶数(leetcode 1116) 方法1:使用互斥锁和条件变量 package mainimport ("fmt""sync" )type ZeroEvenOdd struct {n intzeroMutex sync.MutexevenMutex sync.MutexoddMutex sync.Mutexcurrent int…...
【JVM】Java虚拟机(二)——垃圾回收
目录 一、如何判断对象可以回收 (一)引用计数法 (二)可达性分析算法 二、垃圾回收算法 (一)标记清除 (二)标记整理 (三)复制 (四ÿ…...
Razor编程中@Html的方法使用大全
文章目录 1. 基础HTML辅助方法1.1 Html.ActionLink()1.2 Html.RouteLink()1.3 Html.Display() / Html.DisplayFor()1.4 Html.Editor() / Html.EditorFor()1.5 Html.Label() / Html.LabelFor()1.6 Html.TextBox() / Html.TextBoxFor() 2. 表单相关辅助方法2.1 Html.BeginForm() …...