SLAM十四讲学习笔记 第二期:部分课后实践代码
持续更新....
- 前期准备
- 第二讲
- 实验一:简单输出
- 第五讲
- 任务一:imageBasics(Ubuntu配置opencv)
- 任务二:双目匹配点云(Ubuntu配置pangolin)
- 检验部分我认为可以加深对CMake的理解
- 任务三:rgbd匹配点云(Ubuntu配置Sophus&fmt)
- 第七讲:视觉惯性里程计
- 课程笔记
- ORB特征
- FAST关键点
- BRIEF描述子
- 特征匹配
- 2D-2D:对极几何
- 跑ORB-SLAM3
- 下载小六注释过的ORB_SLAM3代码
- 配置boost
- 安装ORB_SLAM3时遇到的问题
- 配置opencv4
- 配置realsense2
- make过程中遇到"fatal error ... terminated program cc1plus"
- 数据集测试
- 1.数据集下载
- 2.解压Vocabulary
- 3A.按照格式执行mono_euroc【不用ROS,但是遇到了报错】
- 3B.ROS在bashrc中添加ORB_SLAM路径【用ROS】
- 4A. 打开可视化界面
- 4B. 编译ROS文件【有报错】
- 5B. 运行
最近在看SLAM十四讲相关内容,顺便跑一跑快半年没有开过的虚拟机
本期在Ubuntu20上跑一跑《视觉SLAM十四讲》中提到的代码,按照顺序,从第二讲开始
代码库
https://github.com/gaoxiang12/slambook2
本文在ROS上运行cpp代码,一方面ROS与后续内容兼容性强,另一方面ROS的cpp功能做得已经十分完善了。
颜色代码
蓝色
红色
绿色
前期准备
- 有些Ubuntu相关的代码和ROS基础等,笔者放在了上一期:SLAM十四讲学习笔记 第一期:Ubuntu复健计划
- 本期所有代码均放在主页面下的
Slam_ws工作空间下 - 将不同讲分类成了不同功能包
创建与编译工作空间
mkdir -p ~/Slam_ws/src
cd ~/Slam_ws/src
catkin_init_workspace
cd ../
catkin_make
记得source!
第二讲
实验一:简单输出
创建功能包
cd ~/Slam_ws/src
catkin_create_pkg Lec2
新建hello.cpp
#include <iostream>int main()
{std::cout << "Hello, SLAM!" << std::endl;return 0;
}
编辑CMakeLists.txt
打开CMakeLists.txt文件在最后面添加以下行:
此处暂时不需要添加库
add_executable(HelloSlam hello.cpp)
target_link_libraries(HelloSlam ${catkin_LIBRARIES})
编译后运行
cd ~/Slam_ws
catkin_make
source devel/setup.bash
rosrun Lec2 HelloSlam
显示结果

第五讲
任务一:imageBasics(Ubuntu配置opencv)
配置opencv3.X
参考这篇文章 Ubuntu20安装OpenCV3(图解亲测)
检验是否配置成功
pkg-config opencv --modversion

创建功能包
cd ~/Slam_ws/src
catkin_create_pkg lec5 # 尽量选择小写,符合功能包命名标准
搬运源代码
将源代码中的三个小功能包搬过来,最后的结构如下:
修改主文件夹的CMakeLists.cpp
为了适配ROS环境(主要是加了一个catkin的包),对ROS自动生成的CMakeLists.txt稍加修改:
## Compile as C++11, supported in ROS Kinetic and newer
add_compile_options(-std=c++11)# 其他地方不做修改
# ....
# ....
# ....
# ....
# 在最后面加上源代码在主功能包下的配置信息:# Eigen
include_directories("/usr/include/eigen3")# 寻找OpenCV库
find_package(OpenCV REQUIRED)
# 添加头文件
include_directories(${OpenCV_INCLUDE_DIRS})add_subdirectory(imageBasics)
# add_subdirectory(stereo)
# add_subdirectory(rgbd)
修改undistortImage.cpp中读取图片的格式,使其和imageBasics.cpp一致
cv::Mat image = cv::imread(argv[1]); // 图像是灰度图,CV_8UC1
// 判断图像文件是否正确读取
if (image.data == nullptr) { //数据不存在,可能是文件不存在cerr << "文件" << argv[1] << "不存在." << endl;return 0;
}
编译后运行
cd ~/Slam_ws
catkin_make
source devel/setup.bash
运行
【要在虚拟机运行,SSH远程连接无法直接在Windows端显示虚拟机中的新窗口】
rosrun lec5 imageBasics ~/Slam_ws/src/lec5/imageBasics/ubuntu.png
rosrun lec5 undistortImage ~/Slam_ws/src/lec5/imageBasics/ubuntu.png
任务二:双目匹配点云(Ubuntu配置pangolin)
配置pangolin
参考Ubuntu20.04 —— 新系统从头安装ORB-SLAM3过程(2022年)
大哥的这个文档里说Pangolin只有v0.6能用,事实上最新版也能用
如果在cmake时,遇到以下错误:
是因为没有pybind11
事实上笔者只遇到了这一个问题,但是这个问题在网上没找到合适的解决方法
其实主要原因一句话就说明白了:库里的pybind是空的,需要另外下载后导入
可以看我的这篇博客Ubuntu20下载Pangolin
检验是否配置成功
检验部分我认为可以加深对CMake的理解
- 进入
Pangolin/examples/HelloPangolin/ - 进行编译
# 进入examples/HelloPangolin/目录下 mkdir build && cd build cmake .. make - 运行
./HelloPangolin - 运行结果
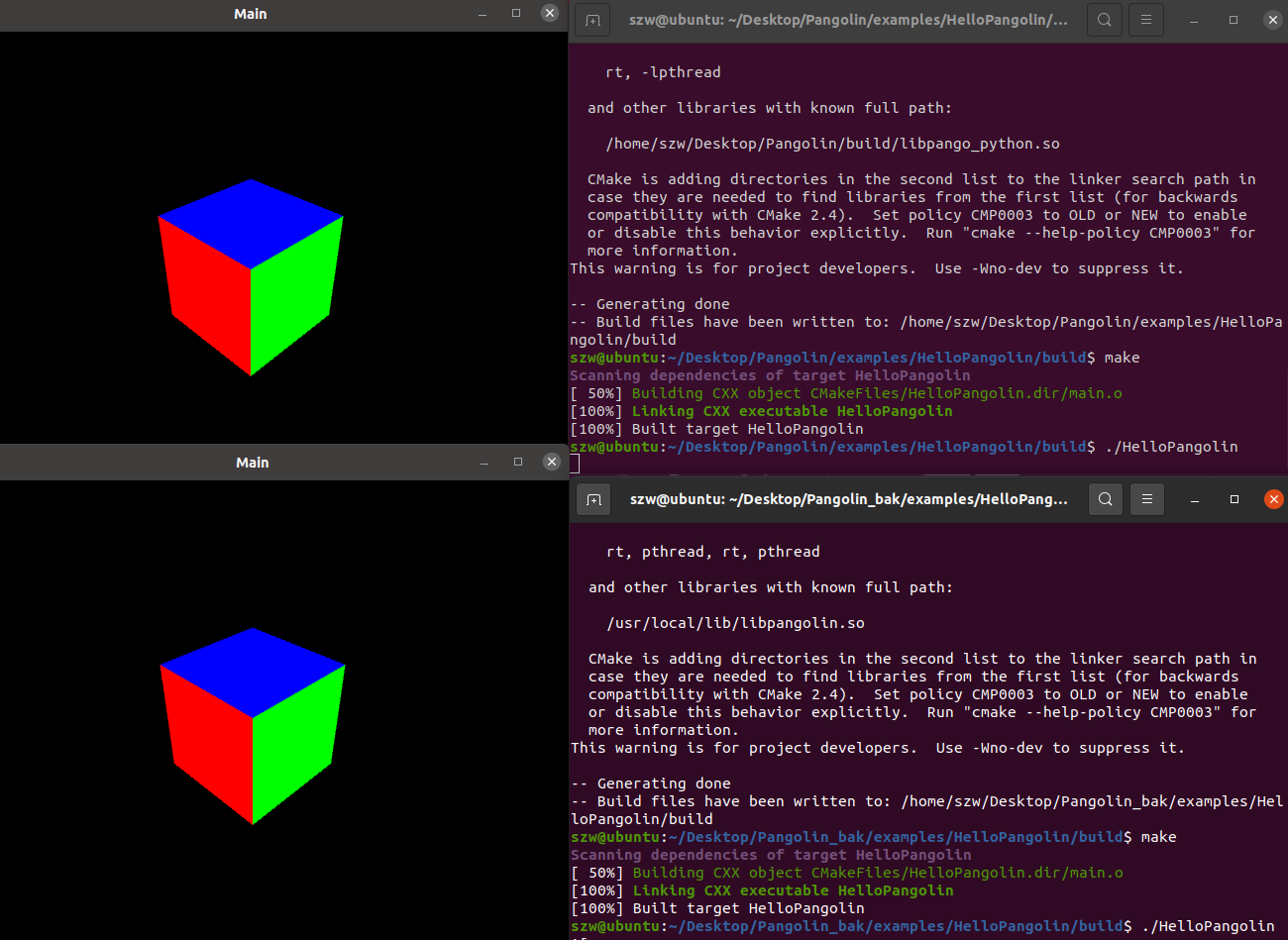
可以看到,在v0.6和最新版都能运行起来
修改主文件夹的CMakeLists.cpp
把任务一中注释掉的
# add_subdirectory(stereo)
解注释即可
编译后运行
cd ~/Slam_ws
catkin_make
source devel/setup.bash
运行
【要进入stereo文件夹下,不然读不到图片】
cd ~/Slam_ws/src/lec5/stereo/
rosrun lec5 imageBasics ~/Slam_ws/src/lec5/imageBasics/ubuntu.png
任务三:rgbd匹配点云(Ubuntu配置Sophus&fmt)
配置sophus
本篇使用的方法是配置模板类【就是在
/usr/local/include/sophus】,若要配置非模板类【就是在/usr/local/lib/libSophus.so】,可以参考
ubuntu下安装Sophus库出现问题及解决办法【原作者漏了最后的make install】
参考ubuntu20.04 安装 Sophus库 slambook2
下文的CMakeLists.txt也是搬运自该文章
检验是否配置成功
查看/usr/local/include下是否已经有sophus文件夹

修改rgbd的CMakeLists.txt
完成配置后,仍不可直接catkin_make,需要修改CMakeLists.txt
全部替换为:
cmake_minimum_required( VERSION 2.8 )
project(rgbd)## 使用模板类sophus
# set(Sophus_DIR "/usr/local/sophus-template/share/sophus/")
#或
set(Sophus_INCLUDE_DIRS "/usr/local/sophus-template/include")
##set(Sophus_LIBS )# 为使用 sophus,需要使用find_package命令找到它
find_package(Sophus REQUIRED)find_package(Pangolin REQUIRED)
find_package(OpenCV REQUIRED)include_directories(${Sophus_INCLUDE_DIRS}${OpenCV-INCLUDE_DIRS}
)
include_directories("/usr/local/include/eigen3")add_executable(joinMap joinMap.cpp)
target_link_libraries(joinMap ${OpenCV_LIBS})
target_link_libraries(joinMap ${Pangolin_LIBRARIES})
target_link_libraries(joinMap ${Sophus_LIBS} fmt)
其作用是添加了eigon和fmt依赖。
修改主文件夹的CMakeLists.cpp
把任务一中注释掉的
# add_subdirectory(rgbd)
解注释即可
编译与运行
cd ~/Slam_ws
catkin_make
source devel/setup.bash
运行
【要进入rgbd文件夹下,不然读不到位置文件】
cd ~/Slam_ws/src/lec5/rgbd/
rosrun lec5 joinMap
第七讲:视觉惯性里程计
课程笔记
特征点由关键点和描述子两部分组成。
关键点是特征点在图像的位置和特征信息如朝向等
描述子通常是一个向量,描述了关键点周围像素的信息;常用来判断两个特征是否相似
ORB特征
ORB特征由关键点和描述子构成
FAST关键点
像素点和周围一圈n个像素的差异【至少有k(k<n)个点比该点大/小一个阈值】
BRIEF描述子
随机取【或者按照某个图案】取特征点附近图像上的两个点,进行比较
特征匹配
针对两张图的特征点的匹配
匹配方法包括暴力匹配和筛选后的匹配【如特征点间的最大距离等等】
2D-2D:对极几何
特征匹配之后,得到了特征点之间的对应关系
- 如果只有两个单目图像,得到2D-2D间的关系——对极几何
- 如果匹配的是帧和地图,得到3D-2D间的关系——PnP
- 如果匹配的是RGB-D图,得到3D-3D间的关系——ICP
跑ORB-SLAM3
这部分基本上参考了【ORB_SLAM】Ubuntu20.04 配置ORB_SLAM3)
下载小六注释过的ORB_SLAM3代码
本文把源码放到了桌面
cd ~/Desktop
git clone https://github.com/electech6/ORB_SLAM3_detailed_comments.git
配置boost
按照Ubuntu20.04 —— 新系统从头安装ORB-SLAM3过程(2022年)这里的配置走就好
安装ORB_SLAM3时遇到的问题
基本上没什么问题,但是:
build.sh脚本文件报错了,是我自己手动执行的build.sh中,在最后编译整个包时【即倒数第二行(cmake .. -DCMAKE_BUILD_TYPE=Release)】,先后遇到了opencv要求版本4.4+、缺少realsense2的问题【后来发现好像只用保证DBOW2和ROS和源码的cv库版本一样即可】
配置opencv4
最后的cmake遇到以下要求
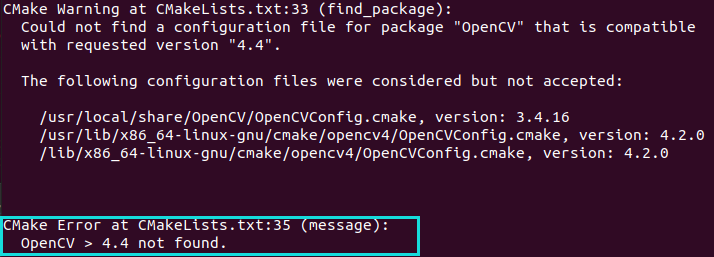
在编译ORB_SLAM3
Ubuntu20安装OpenCV3(图解亲测)
如果前面已经配置过opencv3,那么opencv4按照这个博主的方法,执行到sudo make install即可。
可以通过下列指令进行验证
pkg-config --modversion opencv4
配置realsense2
解决opencv4的问题后,发现还缺依赖realsense2
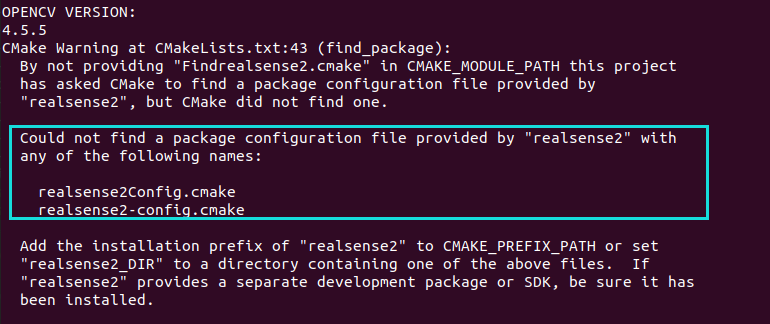
需要下载:
sudo apt-get install ros-noetic-realsense2-camera # Ubuntu20对应这个版本
至此,cmake .. -DCMAKE_BUILD_TYPE=Release顺利通过
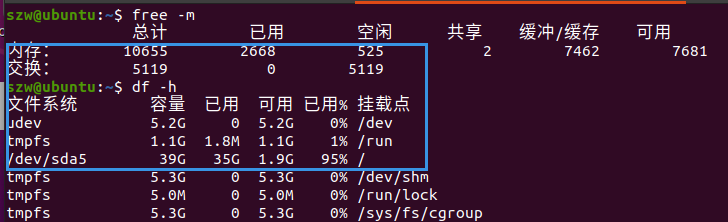
make过程中遇到"fatal error … terminated program cc1plus"
原因是内存不够,可以通过以下指令查看内存
free -m
参考文章:C++: fatal error: Killed signal terminated program cc1plus的问题解决
尝试增加swap区
有一个小技巧,在make时遇到许多Warning,非常碍眼,可以这样:
make -j4 2>&1 | grep -iE 'error|%' # 仅输出报错和百分号(进度)
按照原博主的方法,会说“打开’/swapfile’ 失败: 文本文件忙”
因此稍加修改:
sudo swapoff /swapfile
# 关掉交换文件
sudo dd if=/dev/zero of=/swapfile bs=512M count=10
# count的大小就是增加的swap空间的大小,bs是块大小为512M,所以空间大小是bs*count=5G
sudo mkswap /swapfile
# 把刚才空间格式化成swap格式
sudo chmod 0600 /swapfile
# 更改交换文件的权限为只有root用户可读写
sudo swapon /swapfile
# 使用刚才创建的swap空间
完成后,可以通过以下命令释放内存:
sudo swapoff /swapfile
哥们内存是真不够,,,为了整这个ORB_SLAM,前前后后已经扩了15G了
数据集测试
1.数据集下载
下载地址:
The EuRoC MAV Dataset下载ASL格式
解压到某个地方【可以不在ORB文件夹下】
2.解压Vocabulary
进入ORB的Vocabulary/目录下,解压语义库
tar -xzvf ORBvoc.txt.tar.gz
3A.按照格式执行mono_euroc【不用ROS,但是遇到了报错】
参考主目录或者Examples/目录下的euroc_examples.sh文件;找到与数据集对应的指令,修改为匹配的路径
如【该指令仅供参考,路径因人而异】
cd ~/Desktop/ORB_SLAM3_detailed_comments/
./Examples/Monocular/mono_euroc ./Vocabulary/ORBvoc.txt ./Examples/Monocular/EuRoC.yaml ./datasets/MH05 ./Examples/Monocular/EuRoC_TimeStamps/MH05.txt
遇到报错如下: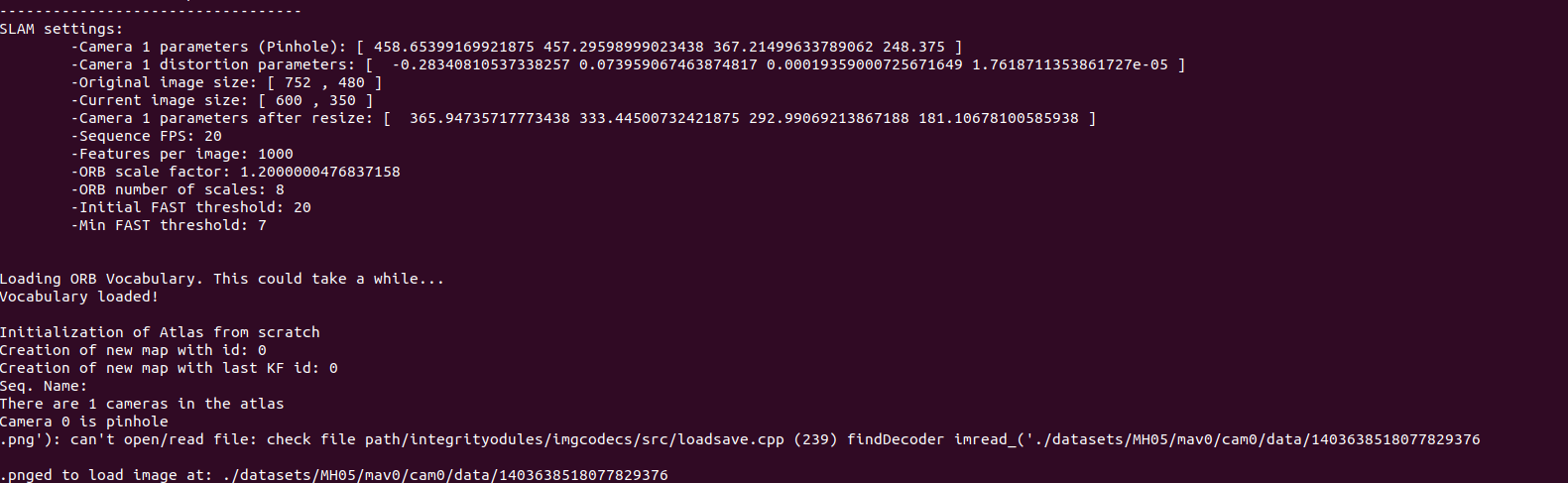
原因是储存文件名信息的.txt文件换行格式有误
3B.ROS在bashrc中添加ORB_SLAM路径【用ROS】
vim ~/.bashrc
然后在文档末尾输入:【路径要修改】
export ROS_PACKAGE_PATH="$ROS_PACKAGE_PATH:/home/szw【注意这里要修改】/Desktop/ORB_SLAM3_detailed_comments/Examples/ROS/ORB_SLAM3"
# vim 操作方法: 输入 按i
# 结束先按Esc ,再按 :wq
最后source一下环境
source ~/.bashrc
4A. 打开可视化界面
修改Examples/Monocular/mono_euroc.cc的第83行,将false改成true

回到主页面,重新编译
cd ORB_SLAM3_detailed_comments/build
cmake ..
make -j
4B. 编译ROS文件【有报错】
cd ORB_SLAM3_detailed_comments/Examples/ROS/ORB_SLAM3
mkdir build
cd build
cmake ..
make -j
cmake ..如果遇到问题,大概率是上面的ROS_PACKAGE_PATH配错了
报错:qtmd,爱咋咋地吧

5B. 运行
# 运行代码之前记得source一下
cd orb_slam3/ORB_SLAM3_detailed_comments/Examples/ROS/ORB_SLAM3/build
source devel/setup.bash
# 终端1
roscore
# 终端2
rosrun ORB_SLAM3 Mono_Inertial /home/robot/orb_slam3/ORB_SLAM3_detailed_comments/Vocabulary/ORBvoc.txt /home/robot/orb_slam3/ORB_SLAM3_detailed_comments/Examples/Monocular-Inertial/EuRoC.yaml
相关文章:
SLAM十四讲学习笔记 第二期:部分课后实践代码
持续更新.... 前期准备第二讲实验一:简单输出 第五讲任务一:imageBasics(Ubuntu配置opencv)任务二:双目匹配点云(Ubuntu配置pangolin)检验部分我认为可以加深对CMake的理解 任务三:r…...

Android kotlin 跳转手机热点开关页面和判断热点是否打开
Android kotlin 跳转手机热点开关页面和判断热点是否打开 判断热点是否打开跳转手机热点开关页面顺带介绍一些其他常用的设置页面跳转 其他热点的一些相关知识Local-only hotspot 参考 判断热点是否打开 网上方法比较多,我这边使用了通过WifiManager 拿反射的getWi…...
Redis 执行 RDB 快照期间,主进程可以正常处理命令吗?
执行了 save 命令,会在主进程生成 RDB 文件,由于和执行操作命令在同一个线程,所以如果写入 RDB 文件的时间太长,会阻塞主进程。 执行 bgsave 过程中,由于是交给子进程来构建 RDB 文件,主进程还是可以继续工…...

Python加入Excel--生产力大提高|微软的全方面办公
Python作为一种功能强大的编程语言,已经逐渐成为了数据分析、机器学习、Web开发等领域的主流语言之一。而将Python集成到Excel中,则可以为Excel用户提供更加强大的数据处理和分析能力,同时也可以为Python开发者提供更加便捷的数据处理和可视化…...

Excel 分组排名
分组排名 公式:SUMPRODUCT((A:AA2)*(C:C>C2)) 1 降序:> 改为 < ⚠️注意1:此处空值参与排名;不参与排名则公式改为:IF(C2“”,“”,SUMPRODUCT((A:AA2)*(C:C>C2)) 1) ⚠️注意2:相同值的项…...

Redis初始以及安装
"梦却了无影踪,梦仍不曾改动" 初始Redis (1) Redis是什么? 要认识、学习一个软件,最重要的途径无一是去该软件的官方文档里瞅瞅、转悠转悠。 从官方文档的介绍中得知,Redis是一种工作于内存,…...

react导出、导入文件
导出文件: if (res) {let binaryData [];binaryData.push(res);let blobUrl ;blobUrl res;// let blobUrl window.URL.createObjectURL(new Blob(binaryData, { type: application / zip }));console.log(blobUrl);const eleLink document.createElement(a);el…...
Redis——String)
(一)Redis——String
以下是在Ubuntu上安装Redis的步骤: 打开终端并输入以下命令以更新软件包列表:sudo apt update输入以下命令以安装Redis:sudo apt install redis-server SET key value GET key key & value 区分大小写 127.0.0.1:6379> set name no…...

Spring Boot多环境指定yml或者properties
Spring Boot多环境指定yml或者properties 文章目录 Spring Boot多环境指定yml或者properties加载顺序配置指定某个yml 加载顺序 ● application-local.properties ● application.properties ● application-local.yml ● application.yml application.propertes server.port…...
MinDoc:针对IT团队的文档、笔记系统
作为一名IT从业者,无论是在公司团队中,还是在平时自己写一些笔记、博客等文档,我都习惯使用markdown来进行书写。在使用过许多支持markdown语法的系统或软件(如Typora、未知、我来、思源、觅道等)后,我总觉…...

【分享】华为设备登录安全配置案例
微思网络www.xmws.cn,2002年成立,专业IT认证培训21年,面向全国招生! 微 信 号 咨 询: xmws-IT 华为HCIA试听课程:超级实用,华为VRP系统文件详解【视频教学】华为VRP系统文件详解 华为HCIA试听课…...

Starrocks与MySQL函数的区别
Starrocks与MySQL函数的区别 Starrocks是一款分布式OLAP数据库,而MySQL则是一种关系型数据库。由于其不同的架构和用途,它们在支持的函数方面存在一些差异。下面将详细介绍Starrocks和MySQL之间常见函数的区别。 1. 聚合函数(Aggregate Fun…...
)
【HTML】学习笔记(自用持续更新)
HTML基本框架 只定义信息,通过标签组成整个页面框架,再通过CSS渲染使得前端页面做的好看 <!DOCTYPE HTML> \\html类型 <html><body><h1>这是一个标题</h1><p>这是一段文字</p></body> </html> …...
、0-1背包理论基础(二)、416分割等和子集)
代码随想录训练营第四十二天|0-1背包理论基础(一)、0-1背包理论基础(二)、416分割等和子集
0-1背包理论基础(一) 文章讲解/视频链接:代码随想录 小节:本节课讲得是0-1背包的二维数组解法,dp[i][j]的含义是从物品0-i中不重复的拿出可以装进容量为j的背包的最大价值的物品,状态转移公式为,dp[i][j] max(dp[i - …...

linux 免交互
Linux 免交互 1、免交互概念2、基本免交互的例子2.1命令行免交互统计2.2使用脚本免交互统计2.3使用免交互命令打印2.4免交互修改密码2.5重定向查看2.6重定向到指定文件2.7重定向直接指定文件2.8使用脚本完成重定向输入2.9免交互脚本完成赋值变量2.10关闭变量替换功能࿰…...
-[文档加载器(Document Loaders)])
自然语言处理从入门到应用——LangChain:索引(Indexes)-[文档加载器(Document Loaders)]
分类目录:《自然语言处理从入门到应用》总目录 合并语言模型和我们自己的文本数据是区分它们的一种强大方式,这样做的第一步是将数据加载到“文档”中,文档加载器的作用就是使这个过程变得简单。 LangChain提供了三种文档加载器:…...
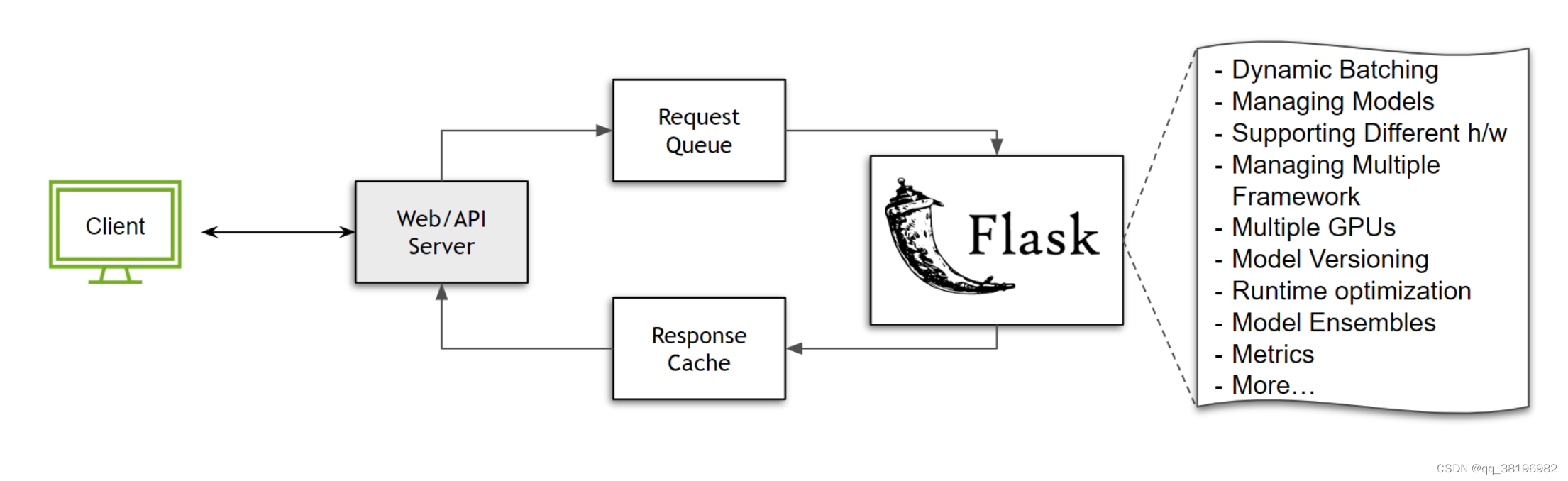
7.接着跑一下triton官方教程
5.Model Ensemble 在此示例中,我们将探索使用模型集成来仅通过单个网络调用在服务器端执行多个模型。这样做的好处是减少了在客户端和服务器之间复制数据的次数,并消除了网络调用固有的一些延迟。 为了说明创建模型集成的过程,我们将重用第…...
波奇学C++:stl的list模拟实现
list是双向带头链表。所以迭代器end()相当于哨兵卫的头。 list不支持和[]重载,原因在于list空间不是连续的,和[]的代价比较大。 访问第n个节点,只能用for循环,来实现 list<int> l; l.push_back(0); l.push_back(1); l.pu…...

Flask 项目结构
前面我们了解了 Flask 框架的特性和一些用法,比如创建一个简单应用、做些页面,以及增加鉴权模块等,如果要将 Flask 用于实际项目开发,还需要了解一下 Flask 项目结构。 Flask 是一个轻量级的 Web 框架,扩展性强&#…...

云计算在IT领域的发展和应用
文章目录 云计算的发展历程云计算的核心概念云计算在IT领域的应用1. 基础设施即服务(IaaS):2. 平台即服务(PaaS):3. 软件即服务(SaaS): 云计算的拓展应用结论 dz…...

.Net框架,除了EF还有很多很多......
文章目录 1. 引言2. Dapper2.1 概述与设计原理2.2 核心功能与代码示例基本查询多映射查询存储过程调用 2.3 性能优化原理2.4 适用场景 3. NHibernate3.1 概述与架构设计3.2 映射配置示例Fluent映射XML映射 3.3 查询示例HQL查询Criteria APILINQ提供程序 3.4 高级特性3.5 适用场…...

为什么需要建设工程项目管理?工程项目管理有哪些亮点功能?
在建筑行业,项目管理的重要性不言而喻。随着工程规模的扩大、技术复杂度的提升,传统的管理模式已经难以满足现代工程的需求。过去,许多企业依赖手工记录、口头沟通和分散的信息管理,导致效率低下、成本失控、风险频发。例如&#…...
深入理解JavaScript设计模式之单例模式
目录 什么是单例模式为什么需要单例模式常见应用场景包括 单例模式实现透明单例模式实现不透明单例模式用代理实现单例模式javaScript中的单例模式使用命名空间使用闭包封装私有变量 惰性单例通用的惰性单例 结语 什么是单例模式 单例模式(Singleton Pattern&#…...

sqlserver 根据指定字符 解析拼接字符串
DECLARE LotNo NVARCHAR(50)A,B,C DECLARE xml XML ( SELECT <x> REPLACE(LotNo, ,, </x><x>) </x> ) DECLARE ErrorCode NVARCHAR(50) -- 提取 XML 中的值 SELECT value x.value(., VARCHAR(MAX))…...

基于Docker Compose部署Java微服务项目
一. 创建根项目 根项目(父项目)主要用于依赖管理 一些需要注意的点: 打包方式需要为 pom<modules>里需要注册子模块不要引入maven的打包插件,否则打包时会出问题 <?xml version"1.0" encoding"UTF-8…...

Java多线程实现之Thread类深度解析
Java多线程实现之Thread类深度解析 一、多线程基础概念1.1 什么是线程1.2 多线程的优势1.3 Java多线程模型 二、Thread类的基本结构与构造函数2.1 Thread类的继承关系2.2 构造函数 三、创建和启动线程3.1 继承Thread类创建线程3.2 实现Runnable接口创建线程 四、Thread类的核心…...

wpf在image控件上快速显示内存图像
wpf在image控件上快速显示内存图像https://www.cnblogs.com/haodafeng/p/10431387.html 如果你在寻找能够快速在image控件刷新大图像(比如分辨率3000*3000的图像)的办法,尤其是想把内存中的裸数据(只有图像的数据,不包…...

用递归算法解锁「子集」问题 —— LeetCode 78题解析
文章目录 一、题目介绍二、递归思路详解:从决策树开始理解三、解法一:二叉决策树 DFS四、解法二:组合式回溯写法(推荐)五、解法对比 递归算法是编程中一种非常强大且常见的思想,它能够优雅地解决很多复杂的…...
【Java多线程从青铜到王者】单例设计模式(八)
wait和sleep的区别 我们的wait也是提供了一个还有超时时间的版本,sleep也是可以指定时间的,也就是说时间一到就会解除阻塞,继续执行 wait和sleep都能被提前唤醒(虽然时间还没有到也可以提前唤醒),wait能被notify提前唤醒…...

简单介绍C++中 string与wstring
在C中,string和wstring是两种用于处理不同字符编码的字符串类型,分别基于char和wchar_t字符类型。以下是它们的详细说明和对比: 1. 基础定义 string 类型:std::string 字符类型:char(通常为8位)…...