[论文阅读笔记26]Tracking Everything Everywhere All at Once
论文地址: 论文
代码地址: 代码
这是一篇效果极好的像素级跟踪的文章, 发表在ICCV2023, 可以非常好的应对遮挡等情形, 其根本的方法在于将2D点投影到一个伪3D(quasi-3D)空间, 然后再映射回去, 就可以在其他帧中得到稳定跟踪.
这篇文章的方法不是很好理解, 代码也刚开源, 做一下笔记备忘.
0. Abstract
传统的光流或者粒子视频跟踪方法都是用有限的时间窗口去解决的, 所以他们并不能很好的应对长时遮挡, 也不能保持估计的轨迹的全局连续性. 为此, 我们提出了一个完整的, 全局的连续性的运动表示方法, 叫做OmniMotion. 具体地, OmniMotion将一个视频序列表示成一个准-3D的规范量(quasi-3D canonical volume), 然后通过定义一个双射(也就是从平面空间到所谓的canonical的空间), 这样我们通过一个准3D空间, 就可以描述一个完整的运动(因为补偿了2D缺失的信息).
1. Method
由于对相关领域知识的匮乏, 先略过Introduction和Related Work部分, 先来看方法.
从整体流程上, OmniMotion将一整个视频序列作为输入, 同时还输入不太准确的带噪的运动估计(例如光流估计), 然后解出一个完整的, 全局的运动轨迹.
那么如何解决遮挡问题呢? 遮挡, 只是在2D的图像平面下遮挡了, 但是在3D信息中是可以恢复出来的. 为此, 我们将场景给投影到某个3D空间, 这个空间可以尽可能描述像素完整的运动. 比如说, 第 t 1 t_1 t1帧的某个像素 x 1 x_1 x1, 给投影到这个3D空间变为 x ′ x' x′, 然后在第 t 2 t_2 t2帧我们再将这个 x ′ x' x′投射到2D平面, 就得到了对应的点 x 2 x_2 x2. 由于这个3D不需要真正的进行3D重建(因为真正的3D重建是需要知道相机的内参和外参, 内参包括图像中心的坐标, 相机的焦距等, 外参需要知道相机的朝向等, 是比较复杂的), 因此我们将该空间成为quasi-3D.
所以具体是如何做的呢?
1.1 规范3D量的组成
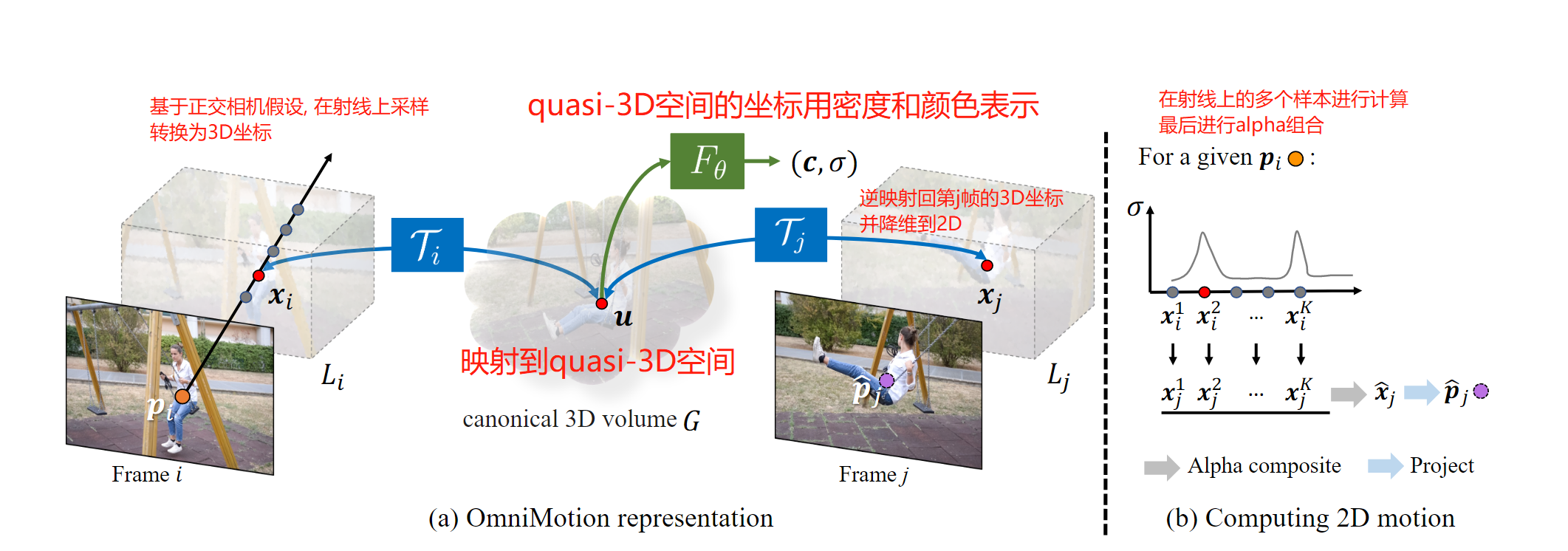
我们将前述的规范3D量记为 G G G. 和神经辐射场(NeRF)一样, 我们在 G G G上定义了一个基于坐标的网络 F θ F_{\theta} Fθ, 该网络将 G G G中的3D坐标 u u u映射到密度 σ \sigma σ和颜色 c c c. 其中密度可以告诉我们表面(surface)在这个3D空间中的位置, 颜色是可以在训练过程中计算光度损失(photometric loss).
1.2 3D双射
如前所述, 我们需要定义一个从本地坐标(也就是视频或图像坐标)到quasi-3D空间的一个映射, 以及逆映射, 这样我们可以再映射回别的时间索引的帧找到对应点. 然而, 实际上该工作是将本地的2D坐标给提升到3D的(后面会讲如何做的), 然后从提升后的本地3D坐标投影到quasi-3D空间. 整个映射和逆映射的过程如下:
x j = T j − 1 ∘ T i ( x i ) x_j = \mathcal{T}_j^{-1}\circ \mathcal{T}_i(x_i) xj=Tj−1∘Ti(xi)
其中 i , j i,j i,j是frame index, 因此, 我们定义的映射是和时间有关的. 然而, 中间产物 u = T i ( x i ) u= \mathcal{T}_i(x_i) u=Ti(xi)应该是与时间无关的.
在实现上, 映射是用可逆神经网络(INN)做的.
1.3 计算运动
流程上, 我们在2D图像上的一个像素 p i p_i pi, 我们首先将其提升到3D, 变成 p i ′ p_i' pi′. 方法是在一个射线上进行采样. 然后用上一节定义的3D双射投影到第 j j j帧对应的3D点, 最后再降维回2D就可以了.
具体地, 由于我们已经将相机的运动包含在映射 T \mathcal{T} T内了 , 因此我们直接将相机建模成固定的正交相机. 固定正交相机的含义是, 物体不再具有近大远小的特征. 这样一来, 我们就可以很容易的将2D坐标拓展到3D坐标. 也就是说, 既然物体的大小不再随着深度的变化而变化, 那么2D像素点 ( x i , y i ) (x_i, y_i) (xi,yi)不论深度如何, 它的值(RGB)一直是一样的, 因此前述的射线可以这样定义:
r i ( z ) = o i + z d , o i = [ p i , 0 ] ∈ R 3 , d = [ 0 , 0 , 1 ] r_i(z)=o_i+zd, \\ o_i = [p_i, 0] \in \mathbb{R}^3, d = [0, 0, 1] ri(z)=oi+zd,oi=[pi,0]∈R3,d=[0,0,1]
因此我们在这个射线上采集 K K K个样本, 就相当于在这个固定正交相机拍摄的3D场景中进行深度采样.
然后, 这么一堆样本, 我们用映射 T i \mathcal{T}_i Ti投影到quasi-3D空间, 然后再用之前说的映射 F θ F_{\theta} Fθ转换成密度和颜色的量 ( σ , c ) (\sigma, c) (σ,c), 即, 对于第 k k k个样本:
( σ k , c k ) = F θ ( T i ( x i k ) ) x j k = T j − 1 ( ( σ k , c k ) ) (\sigma_k, c_k) = F_\theta(\mathcal{T}_i(x_i^k)) \\ x_j^k = \mathcal{T}_j^{-1}((\sigma_k, c_k)) (σk,ck)=Fθ(Ti(xik))xjk=Tj−1((σk,ck))
随后, 我们根据第 j j j帧的这 K K K个对应样本, 得到第 j j j帧的估计:
x ^ j = ∑ k = 1 K T k α k x j k , where T k = Π l = 1 k − 1 ( 1 − α l ) , α k = 1 − exp { − σ k } \hat{x}_j = \sum_{k=1}^KT_k\alpha_kx_j^k, \\ \text{where} ~~T_k=\Pi_{l=1}^{k-1}(1-\alpha_l), \\ \alpha_k = 1-\exp\{-\sigma_k\} x^j=k=1∑KTkαkxjk,where Tk=Πl=1k−1(1−αl),αk=1−exp{−σk}
以上的过程叫做alpha compositing, 是NeRF中一个常用的技巧. 意义是, 密度实际上表达了3D空间中存在物体的可能性, 1 − exp { − σ k } 1-\exp\{-\sigma_k\} 1−exp{−σk}就是一种对概率的衡量. 对于是否采纳第 k k k个样本, 重要性为 T k α k T_k\alpha_k Tkαk, α k \alpha_k αk已经解释. T k T_k Tk的含义是在这之前的样本的联合可信程度, 也就是说, 之前有一个样本已经比较可信了, 那么这个样本就可以更少的采纳.
以上是个人理解
因此, 上面的过程总结为下图:
2. Training
这个工作是用已有的光流方法生成标签, 指导训练的. 这部分重点先记一下损失函数.
损失函数由三部分构成, 一个是位置误差, 也就是坐标误差. 一个是颜色误差, 这就是前面 c c c的作用, 还有一个是因为要保证平稳性而加入的罚项. 其中1, 3项采用1范数, 第二项采用2范数.
Flow loss:
L f l o = ∑ f i → j ∣ ∣ f ^ i → j − f i → j ∣ ∣ 1 , f ^ i → j = p ^ j − p i \mathcal{L}_{flo} = \sum_{f_{i \to j}}|| \hat{f}_{i \to j} - f_{i \to j}||_1, \\ \hat{f}_{i \to j} = \hat{p}_j - p_i Lflo=fi→j∑∣∣f^i→j−fi→j∣∣1,f^i→j=p^j−pi
photometric loss:
L p h o = ∑ i , p ∣ ∣ C ^ i ( p ) − C i ( p ) ∣ ∣ 2 2 \mathcal{L}_{pho} = \sum_{i, p}|| \hat{C}_{i}(p) - C_i(p)||_2^2 Lpho=i,p∑∣∣C^i(p)−Ci(p)∣∣22
smooth loss:
L r e g = ∑ i , x ∣ ∣ x i + 1 − x i + x i − 1 − x i ∣ ∣ 1 \mathcal{L}_{reg} = \sum_{i, x}|| x_{i + 1} - x_i + x_{i - 1} - x_i||_1 Lreg=i,x∑∣∣xi+1−xi+xi−1−xi∣∣1
意义是保证前一帧和后一帧的差距尽量小.
最终的loss是这三项的线性组合.
相关文章:
[论文阅读笔记26]Tracking Everything Everywhere All at Once
论文地址: 论文 代码地址: 代码 这是一篇效果极好的像素级跟踪的文章, 发表在ICCV2023, 可以非常好的应对遮挡等情形, 其根本的方法在于将2D点投影到一个伪3D(quasi-3D)空间, 然后再映射回去, 就可以在其他帧中得到稳定跟踪. 这篇文章的方法不是很好理解, 代码也刚开源, 做一…...
【Java 动态数据统计图】前后端对接数据格式(Map返回数组格式数据)六(120)
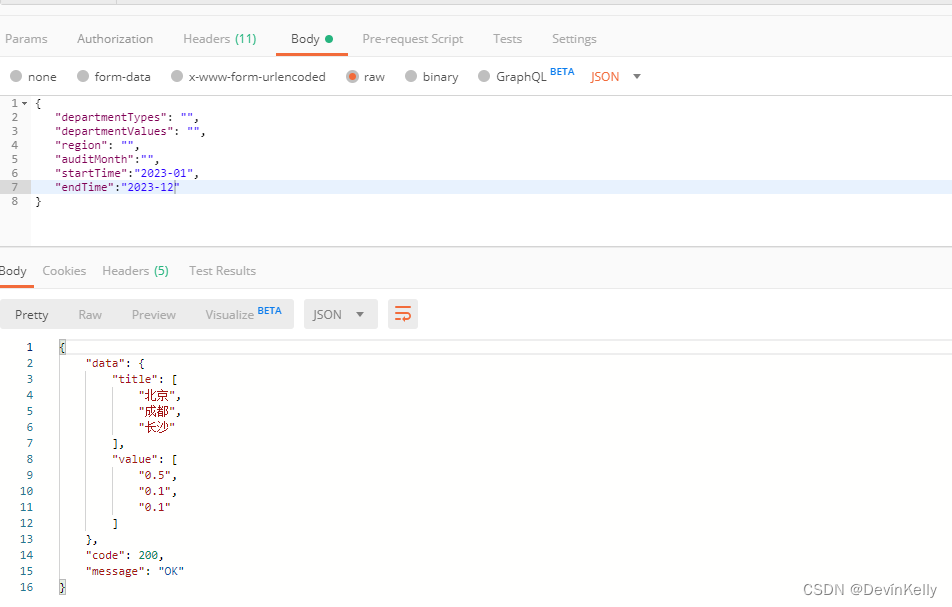
说明: 前端使用:vue3.0 前后端对接数据格式:无非就是前端把后端返回的数据处理为自己想要的格式,或者,后端给前端处理好想要的格式; 针对前后端的柱状图,趋势图等数据对接,前端一般需…...
❤ 给自己的mac系统上安装java环境
❤ 给自己的mac系统上安装java环境 🍓 作为前端工程师如何给自己的mac系统上安装java环境 🍎 最近因为自己的一些项目需求,mac电脑上需要安装一些后台的java环境,用来跑后台的java程序,于是从一个前端工程师的角度安…...

Java-匿名类
介绍 匿名类是指没有名字的类,它对一个给定的类进行拓展,或者实现一个给定的接口。使用匿名类可以使得代码更加简洁、紧凑、模块程度更高。 实现方式及语法 匿名类有两种实现方式 继承一个类,重写其方法实现一个接口(可以是多…...
Maven的超级POM
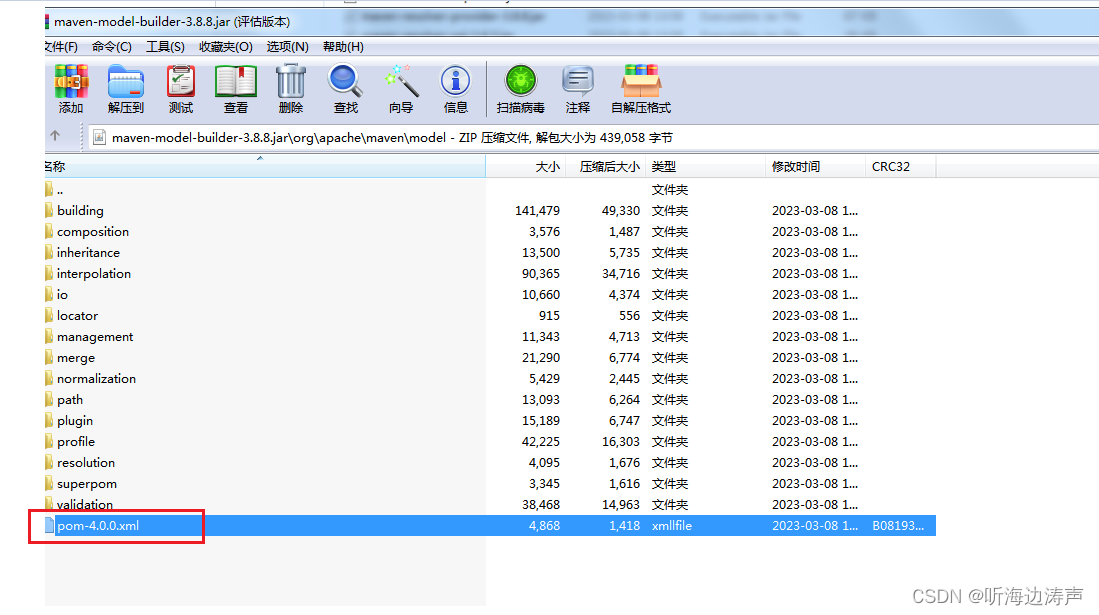
对于我们创建的一个maven工程,即便我们自己的pom.xm文件中没有明确指定一个父工程(父POM),其实也默认继承了超级POM,就好比JAVA类继承Object类一样。 maven官网关于超级POM的介绍: https://maven.apache.o…...

软考高级系统架构设计师系列论文九十二:论新技术的引进
软考高级系统架构设计师系列论文九十二:论新技术的引进 一、摘要二、正文三、总结一、摘要 根据国家税务总局对税务系统内所有系统进行集成与整合的需求,我所在的开发单位组织了全国金税工程防伪税控系统网络版的升级开发工作。该项目工程浩大,要求在具有严格的安全、可靠性…...

vue使用Bootstrap的详细方法
要在Vue中使用Bootstrap,您可以按照以下步骤进行操作: 安装Bootstrap:首先,您需要安装Bootstrap。您可以使用npm或者yarn来安装Bootstrap。打开终端,并在项目的根目录中运行以下命令: npm install bootst…...

leetcode做题笔记103. 二叉树的锯齿形层序遍历
给你二叉树的根节点 root ,返回其节点值的 锯齿形层序遍历 。(即先从左往右,再从右往左进行下一层遍历,以此类推,层与层之间交替进行)。 思路一:BFS #define N 2000int** zigzagLevelOrder(st…...
如果将PC电脑变成web服务器:利用Nignx反向代理绕过运营商对80端口封锁
如果将PC电脑变成web服务器:利用Nignx反向代理绕过运营商对80端口封锁 在上一篇文章中,我们已经实现了内网主机的多次端口映射,将内网主机的端口映射到了公网,可以通过公网访问该主机了。 因为电信的家庭宽带,默认是…...

Eureka:服务注册-信息配置-自我保护机制
首先在提供者服务下,添加一个依赖 <!-- Eureka --><dependency><groupId>org.springframework.cloud</groupId><artifactId>spring-cloud-starter-eureka</artifactId><version>1.4.6.RELEASE</version><…...
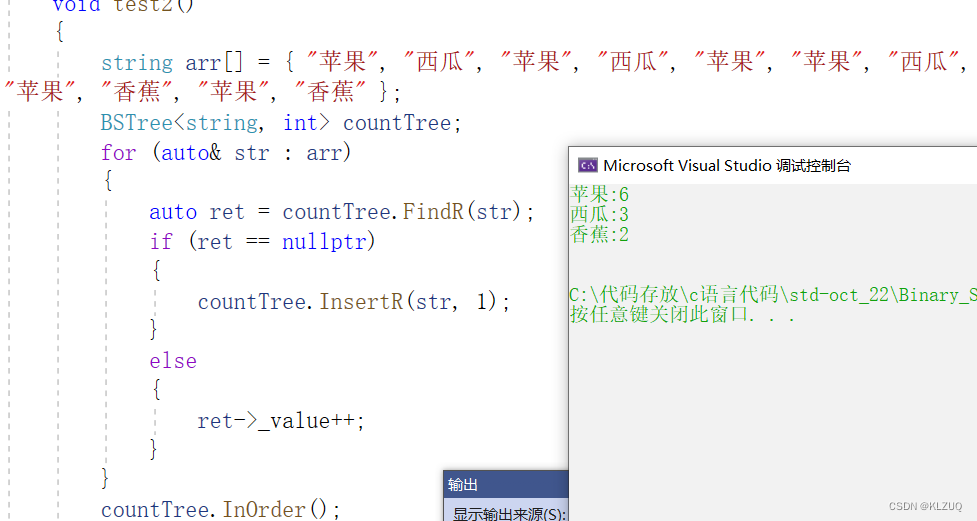
C++二叉树进阶
本期内容我们讲解二叉树的进阶知识,没有看过之前内容的小伙伴建议先看往期内容 二叉树-----补充_KLZUQ的博客-CSDN博客 目录 二叉搜索树 代码实现 基础框架 Insert Find Erase 析构函数 拷贝构造 赋值 二叉搜索树的应用 全部代码 二叉搜索树 二叉搜索树…...

layui tree组件取消勾选
layui(2.8.15) tree的api中,只有 tree.setChecked(id, idArr) 方法,没有取消勾选的方法。 我的需求是:勾选后做判断,如果不符合条件则取消勾选。 实现方法: 使用 tree的oncheck事件,在回调函数中做判断&…...

【Android基础面试题】ViewPager与ViewPager2的区别
ViewPager和ViewPager2是Android中用于实现滑动页面切换的控件。它们的主要区别如下: 实现方式 ViewPager2的内部实现是RecyclerView,而ViewPager是通过继承自ViewGroup实现的。因此,ViewPager2的性能更高。 滑动方向 ViewPager2可以实现横向…...

springCloudGateway网关配置
1.配置跨域支持 /*** 跨域支持*/ Configuration public class CorsConfig {Beanpublic CorsWebFilter corsFilter() {CorsConfiguration config new CorsConfiguration();config.addAllowedMethod("*");config.addAllowedOrigin("*");config.addAllowedH…...
kali 2023.3新增工具
在终端模拟器中运行 sudo apt update && sudo apt full-upgrade 命令来更新其安装 Kali Linux 2023.3 发布中包含了九个新工具,分别是: Calico:云原生网络和网络安全。 cri-tools:用于Kubelet容器运行时接口的命令行界面…...

W25Q64 驱动--基于SPI2接口
前言 (1)本系列是基于STM32的项目笔记,内容涵盖了STM32各种外设的使用,由浅入深。 (2)小编使用的单片机是STM32F105RCT6,项目笔记基于小编的实际项目,但是博客中的内容适用于各种单片…...

禁用无线键盘指定按键
文章目录 前言主体 前言 睡一觉把键盘压坏了一个按键,一开机键盘就自动打出这个字母,我在想用其他按键平替这个字母即可,使用软件修改内部的映射,那么使用autoHotkey软件是十分容易做到的 主体 letter_replace.ahk 创建一个如此命名的文件,然后输入命令即可 a::b 代表平替 a…...
)
分数规划(二分)
链接:登录—专业IT笔试面试备考平台_牛客网 来源:牛客网 题目描述 小咪是一个土豪手办狂魔,这次他去了一家店,发现了好多好多(n个)手办,但他是一个很怪的人,每次只想买k个手办&a…...
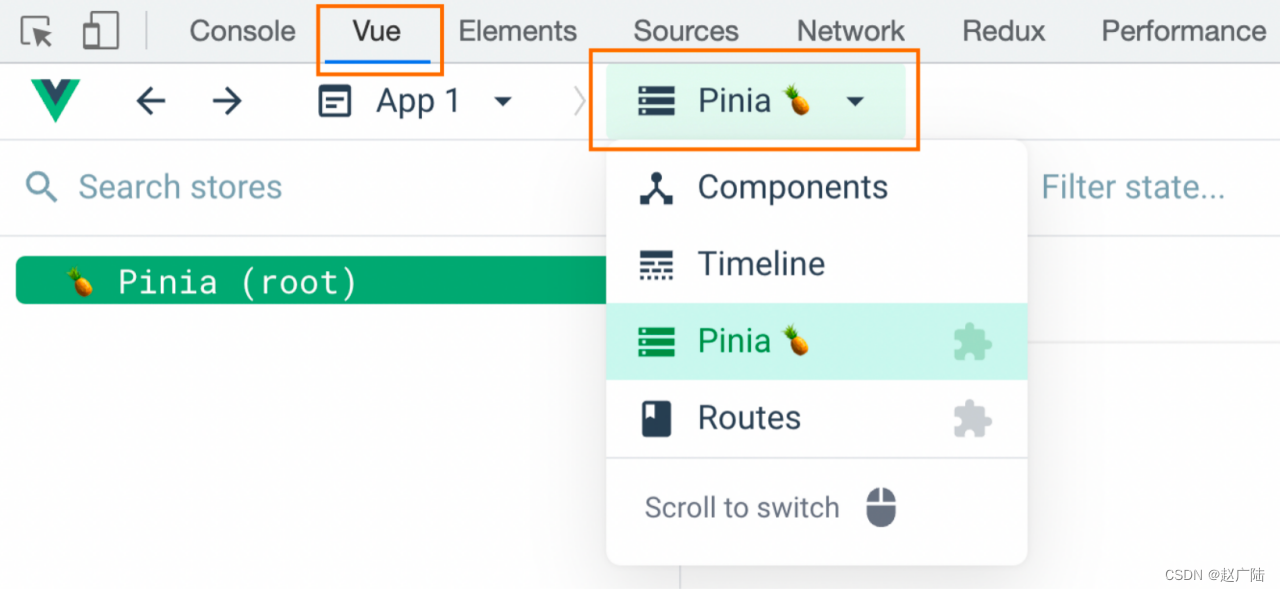
Vue2向Vue3过度Vue3状态管理工具Pinia
目录 1. 什么是Pinia2. 手动添加Pinia到Vue项目3. Pinia基础使用4. getters实现5. action异步实现6. storeToRefs工具函数7. Pinia的调试8. Pinia持久化插件 1. 什么是Pinia Pinia 是 Vue 的专属的最新状态管理库 ,是 Vuex 状态管理工具的替代品 2. 手动添加Pinia到…...
STM32--SPI通信与W25Q64(1)
文章目录 前言SPI通信硬件电路移位过程 SPI时序起始与终止条件交换一个字节 W25Q64硬件电路框图 FLASH操作注意事项软件SPI读写W25Q64 前言 USART串口链接入口 I2C通信链接入口 SPI通信 SPI(Serial Peripheral Interface)是一种高速的、全双工、同步的串…...
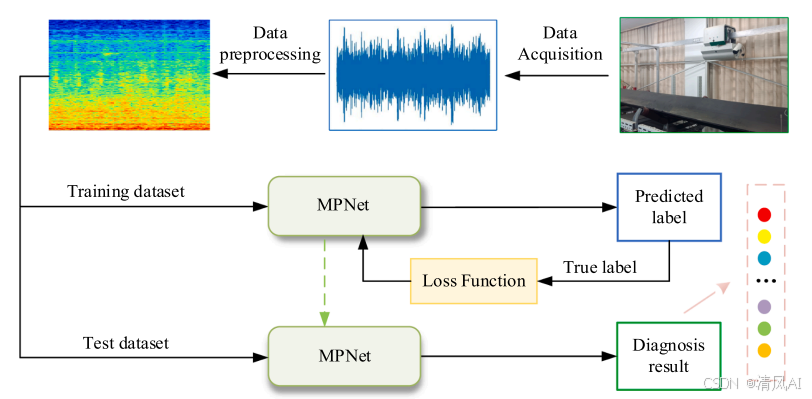
MPNet:旋转机械轻量化故障诊断模型详解python代码复现
目录 一、问题背景与挑战 二、MPNet核心架构 2.1 多分支特征融合模块(MBFM) 2.2 残差注意力金字塔模块(RAPM) 2.2.1 空间金字塔注意力(SPA) 2.2.2 金字塔残差块(PRBlock) 2.3 分类器设计 三、关键技术突破 3.1 多尺度特征融合 3.2 轻量化设计策略 3.3 抗噪声…...

[2025CVPR]DeepVideo-R1:基于难度感知回归GRPO的视频强化微调框架详解
突破视频大语言模型推理瓶颈,在多个视频基准上实现SOTA性能 一、核心问题与创新亮点 1.1 GRPO在视频任务中的两大挑战 安全措施依赖问题 GRPO使用min和clip函数限制策略更新幅度,导致: 梯度抑制:当新旧策略差异过大时梯度消失收敛困难:策略无法充分优化# 传统GRPO的梯…...

SciencePlots——绘制论文中的图片
文章目录 安装一、风格二、1 资源 安装 # 安装最新版 pip install githttps://github.com/garrettj403/SciencePlots.git# 安装稳定版 pip install SciencePlots一、风格 简单好用的深度学习论文绘图专用工具包–Science Plot 二、 1 资源 论文绘图神器来了:一行…...

day52 ResNet18 CBAM
在深度学习的旅程中,我们不断探索如何提升模型的性能。今天,我将分享我在 ResNet18 模型中插入 CBAM(Convolutional Block Attention Module)模块,并采用分阶段微调策略的实践过程。通过这个过程,我不仅提升…...
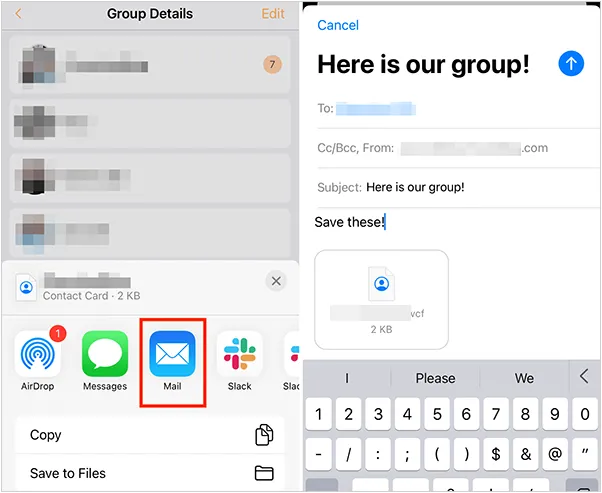
如何将联系人从 iPhone 转移到 Android
从 iPhone 换到 Android 手机时,你可能需要保留重要的数据,例如通讯录。好在,将通讯录从 iPhone 转移到 Android 手机非常简单,你可以从本文中学习 6 种可靠的方法,确保随时保持连接,不错过任何信息。 第 1…...

DBAPI如何优雅的获取单条数据
API如何优雅的获取单条数据 案例一 对于查询类API,查询的是单条数据,比如根据主键ID查询用户信息,sql如下: select id, name, age from user where id #{id}API默认返回的数据格式是多条的,如下: {&qu…...

优选算法第十二讲:队列 + 宽搜 优先级队列
优选算法第十二讲:队列 宽搜 && 优先级队列 1.N叉树的层序遍历2.二叉树的锯齿型层序遍历3.二叉树最大宽度4.在每个树行中找最大值5.优先级队列 -- 最后一块石头的重量6.数据流中的第K大元素7.前K个高频单词8.数据流的中位数 1.N叉树的层序遍历 2.二叉树的锯…...
算法岗面试经验分享-大模型篇
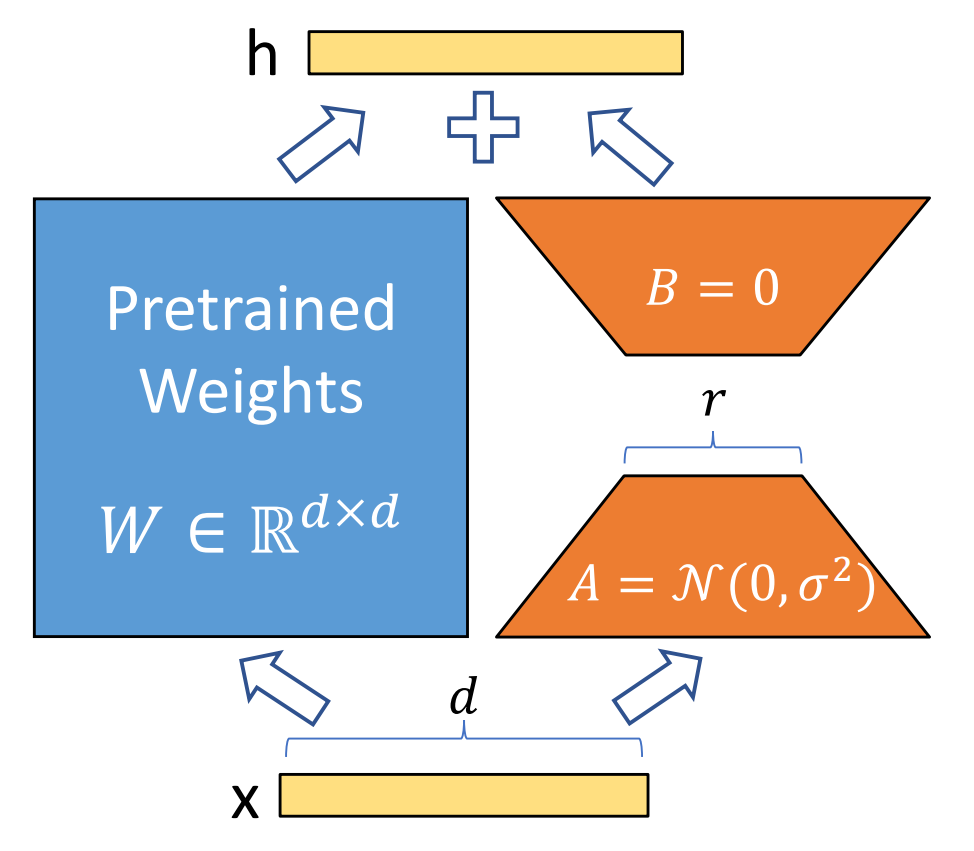
文章目录 A 基础语言模型A.1 TransformerA.2 Bert B 大语言模型结构B.1 GPTB.2 LLamaB.3 ChatGLMB.4 Qwen C 大语言模型微调C.1 Fine-tuningC.2 Adapter-tuningC.3 Prefix-tuningC.4 P-tuningC.5 LoRA A 基础语言模型 A.1 Transformer (1)资源 论文&a…...

【7色560页】职场可视化逻辑图高级数据分析PPT模版
7种色调职场工作汇报PPT,橙蓝、黑红、红蓝、蓝橙灰、浅蓝、浅绿、深蓝七种色调模版 【7色560页】职场可视化逻辑图高级数据分析PPT模版:职场可视化逻辑图分析PPT模版https://pan.quark.cn/s/78aeabbd92d1...

C#中的CLR属性、依赖属性与附加属性
CLR属性的主要特征 封装性: 隐藏字段的实现细节 提供对字段的受控访问 访问控制: 可单独设置get/set访问器的可见性 可创建只读或只写属性 计算属性: 可以在getter中执行计算逻辑 不需要直接对应一个字段 验证逻辑: 可以…...