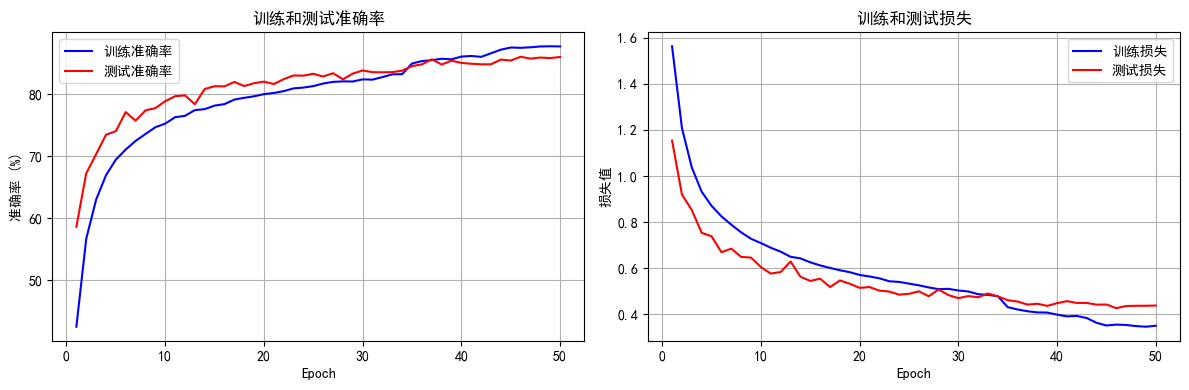
使用matplotlib绘制动图
主程序如下:
'''
项目:701项目三分报告
作者:WN
内容:速度障碍法实现
时间:2023年8月26号
'''
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
from matplotlib import animation
from utils import *uav1 = Agent(1, [0, 0])
trace1 = []
uav2 = Agent(2, [40, 40])
uav2.yaw = uav1.yaw + np.pi
trace2 = []trace = []for i in range(100):uav1.step()trace1.append((uav1.pos[0], uav1.pos[1]))uav2.step()trace2.append((uav2.pos[0], uav2.pos[1]))trace.append((uav1.pos[0], uav1.pos[1], uav2.pos[0], uav2.pos[1]))# plt.xlim(0,40)
# plt.ylim(0,40)
# plt.scatter([x[0] for x in trace1], [x[1] for x in trace1], color='r')
# plt.scatter([x[0] for x in trace2], [x[1] for x in trace2], color='b')
# plt.show()fig, ax = plt.subplots()
xdata1, ydata1 = [], []
xdata2, ydata2 = [], []line1, = ax.plot(xdata1, ydata1, 'ro')
line2, = ax.plot(xdata2, ydata2, 'bo')def init():ax.set_xlim(0,40)ax.set_ylim(0,40)return line1, line2
def update(frame): # 帧print(frame)xdata1.append(frame[0])ydata1.append(frame[1])line1.set_data(xdata1, ydata1)xdata2.append(frame[2])ydata2.append(frame[3])line2.set_data(xdata2, ydata2)return line1,line2ani = animation.FuncAnimation(fig=fig,func=update,frames=trace,init_func=init,interval=100, # 时间间隔
)
plt.show()
ani.save('1.gif', writer='pillow')
函数库如下:
'''
作者:WN
内容:速度障碍法实现的主要函数
时间:2023年8月26号
'''
import numpy as npclass Agent(object):def __init__(self, ID, pos_0):self.id = IDself.v = 0.05 # 平台的速度(米/秒)self.pos = pos_0 # 平台的初始位置self.yaw = np.pi/3 # 平台的航向(0至2pi)self.det = 5 # 平台的探测范围self.state = 'None' # 平台的状态(暂为缺省值)self.step_num = 0 # 记录平台仿真时间self.obs = None # 记录平台所能观测到的数据def Stragey(self):'''根据智能体得到的观测数据来决策(输入、输出应根据需求具体设计)输入: 观测数据、当前位置、探测数据输出:新的速度'''passdef Pos_update(self):'''输入:当前位置、速度输出:更新后的位置'''self.pos[0] += self.v * np.cos(self.yaw)self.pos[1] += self.v * np.sin(self.yaw)passdef step(self):self.step_num += 1#########根据探测到的数据和策略解算新的位置、速度# self.v = self.Stragey()self.Pos_update()相关文章:

使用matplotlib绘制动图
主程序如下: 项目:701项目三分报告 作者:WN 内容:速度障碍法实现 时间:2023年8月26号import numpy as np import pandas as pd import matplotlib.pyplot as plt from matplotlib import animation from utils import *uav1 Agen…...
加油站ai视觉分析检测预警
加油站ai视觉分析预警系统通过yolov8图像识别和行为分析,加油站ai视觉分析预警算法识别出打电话抽烟、烟火行为、静电释放时间是否合规、灭火器摆放以及人员工服等不符合规定的行为,并发出预警信号以提醒相关人员。YOLOv8 的推理过程和 YOLOv5 几乎一样&…...
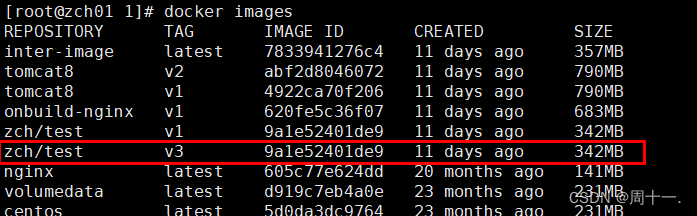
Docker构建镜像
Docker根据Dockerfile文件构建镜像 在实际生产中,常常使用Dockerfile构建企业级生产环境镜像,然后再部署在我们的生产环境中,本文将从从零开始介绍Dockerfile如何使用,构建镜像。 Dockerhub官网地址:https://registry.hub.docke…...

【太多网工对NAT还存在这4种误解!你是其中一个吗?】
NAT是解决公网地址不够用大家最熟悉的网络技术之一,而NAT最依赖的是NAT translation表项,至于NAT的概念和背景这里不再解释,网络上有很多关于此的类似介绍,自己搜索即可。下面主要是针对大家对NAT的一些误解进行分析。 1 误解一…...

React钩子函数之useEffect,useLayoutEffect与useInsertionEffect的区别
React钩子函数在React开发中扮演着非常重要的角色。其中,useEffect、useLayoutEffect和useInsertionEffect是三个常用的钩子函数,它们的作用虽然有些相似,但是也存在一些区别。在本文中,我们将详细介绍这三个钩子函数的区别&#…...

Unity——后期处理举例
Post Processing(后期处理)并不属于特效,但现代的特效表现离不开后期处理的支持。本文以眩光(Bloom)为例,展示一种明亮的激光的制作方法 1、安装后期处理扩展包 较新的Unity版本已经内置了新版的后期处理扩…...
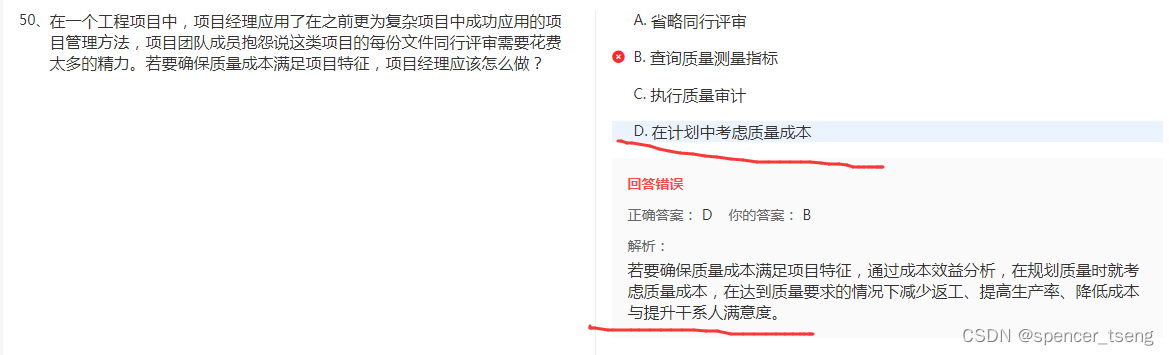
PMP P-05 Quality Management
质量管理...

vue中css修改滚动条样式
vue中css修改滚动条样式 效果图: 代码(在app.vue中全局增加下面样式即可): &::-webkit-scrollbar {width: 8px;height: 8px;border-radius: 3px;}/*定义滚动条轨道 内阴影圆角*/&::-webkit-scrollbar-track {//-webkit-box-shadow: inset 0 0 …...

uniapp的H5实现图片长按保存
实现图片预览 使用uniapp的api实现图片预览,可以缩放,关闭等操作 uni.previewImage({urls:[imageUrl],success:()>{this.controllTouch();} }) imageUrl是图片地址,如https://www.111.com/abc/image.png urls是字符串数组,…...
)
Java 8:Stream API 流式操作(学习)
Java 8:Stream API Java 8 中的 Stream API 是一组用于对集合数据进行处理的新特性;提供一种以声明式风格对集合进行操作的方式,简化集合的处理,使得代码更加简洁、优雅,并且能够更高效地处理数据; 这种风格…...

04_20 直接使用代码 创建内核模块获取物理内存信息
好像和 free得出来有关 和/proc/meminfo 有关 但是下面是全部的物理页 #include <linux/version.h> #include <linux/module.h> #include <linux/init.h> #include <linux/mm.h>//下面宏表示物理内存空间起始地址 对应页帧号 #define ARCH_PFN_OFFSET…...

<C++> STL_list
1.list的介绍 list是可以在常数范围内在任意位置进行插入和删除的序列式容器,并且该容器可以前后双向迭代。list的底层是双向链表结构,双向链表中每个元素存储在互不相关的独立节点中,在节点中通过指针指向 其前一个元素和后一个元素。list与…...
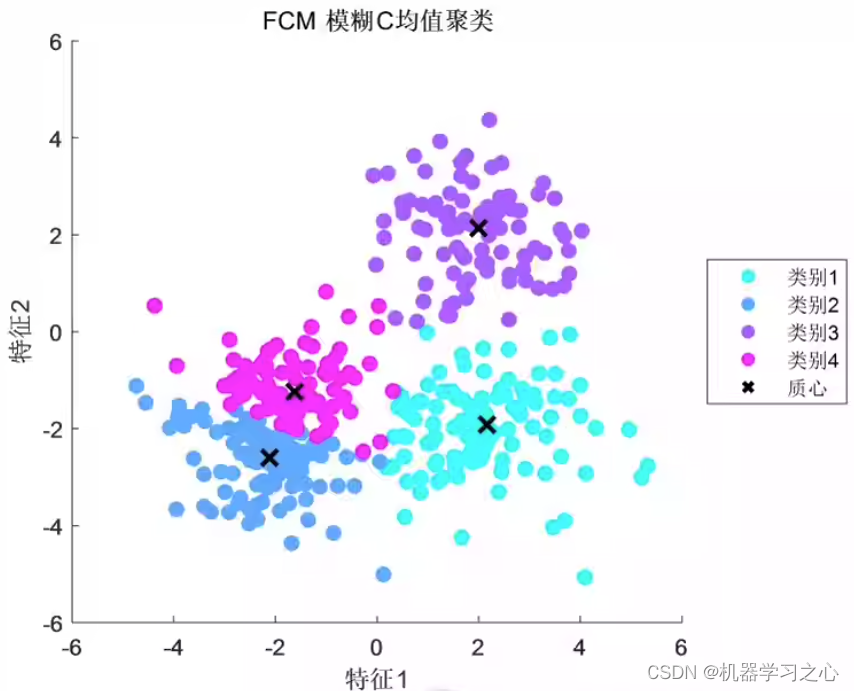
聚类分析 | MATLAB实现基于FCM模糊C均值聚类结果可视化
聚类分析 | MATLAB实现基于FCM模糊C均值聚类结果可视化 目录 聚类分析 | MATLAB实现基于FCM模糊C均值聚类结果可视化效果一览基本介绍程序设计参考资料 效果一览 基本介绍 FCM模糊C均值聚类,聚类结果可视化,MATLAB程序。 FCM(Fuzzy C-Means&a…...

C++笔记之设计模式:setter函数、依赖注入
C笔记之设计模式:setter函数、依赖注入 参考笔记: 1.C笔记之静态成员函数可以在类外部访问私有构造函数吗? 2.C笔记之设计模式:setter函数、依赖注入 3.C笔记之两个类的实例之间传递参数——通过构造函数传递类对象的方法详细探究…...
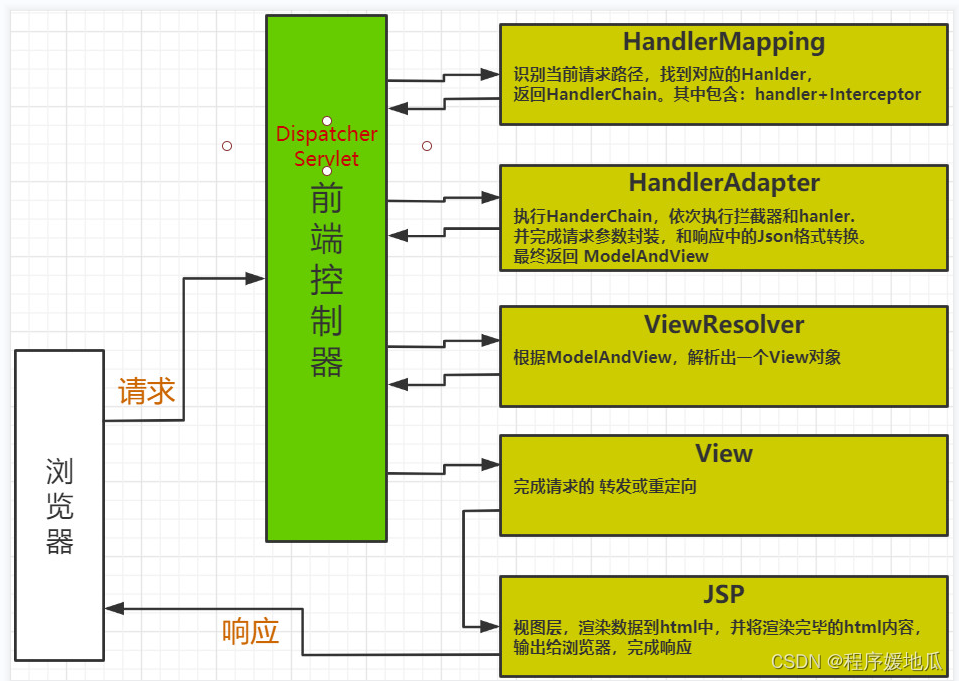
Spring MVC详解
文章目录 一、SpringMVC1.1 引言1.2 MVC架构1.2.1 概念1.2.2 好处 二、开发流程2.1 导入依赖2.2 配置核心(前端)控制器2.3 后端控制器2.4 配置文件2.5 访问 三、接收请求参数3.1 基本类型参数3.2 实体收参【重点】3.3 数组收参3.4 集合收参 【了解】3.5 路径参数3.6 中文乱码 四…...

谷歌公开.zip域名,应采取哪些措施应对可能的安全风险?
近期,谷歌发布了几个新的顶级域名,这些新域名包括.dad、.esq、.prof、.phd、.nexus、.foo、.mov以及本文我们将要提到的.zip域名。自发布以来,多个安全社区都开始讨论这些顶级域名所带来的影响,主要原因是.zip很容易被误认为是文件…...

css3滤镜属性filter让网页变黑白
今天是特殊的日子,抗击疫情全国哀悼日,向英雄们致敬,一路走好!应该发现了今天很多网站页面都是黑白色的,我的博客今天都是黑白色,用css3滤镜属性filter让网页马上变黑白,一行代码就搞定。 在你…...

C++教程 - How to C++系列专栏第5篇
关于专栏 这个专栏是优质的C教程专栏,如果你还没看过第0篇,点击这里去第0篇 本专栏一致使用操作系统:macOS Ventura,代码编辑器:CLion,C编译器:Clang 感谢一路相伴的朋友们,感谢你…...
Vue2向Vue3过度核心技术插槽
目录 1 插槽-默认插槽1.作用2.需求3.问题4.插槽的基本语法5.代码示例6.总结 2 插槽-后备内容(默认值)1.问题2.插槽的后备内容3.语法4.效果5.代码示例 3 插槽-具名插槽1.需求2.具名插槽语法3.v-slot的简写4.总结 4 作用域插槽1.插槽分类2.作用3.场景4.使用…...

vite配置electron、ElementPlus或者AntDesignVue
这是全部的配置原文: import { defineConfig } from vite; import vue from vitejs/plugin-vue; import electron from "vite-plugin-electron"; import electronRenderer from "vite-plugin-electron-renderer"; import polyfillExports from…...
国防科技大学计算机基础课程笔记02信息编码
1.机内码和国标码 国标码就是我们非常熟悉的这个GB2312,但是因为都是16进制,因此这个了16进制的数据既可以翻译成为这个机器码,也可以翻译成为这个国标码,所以这个时候很容易会出现这个歧义的情况; 因此,我们的这个国…...
日语AI面试高效通关秘籍:专业解读与青柚面试智能助攻
在如今就业市场竞争日益激烈的背景下,越来越多的求职者将目光投向了日本及中日双语岗位。但是,一场日语面试往往让许多人感到步履维艰。你是否也曾因为面试官抛出的“刁钻问题”而心生畏惧?面对生疏的日语交流环境,即便提前恶补了…...

ES6从入门到精通:前言
ES6简介 ES6(ECMAScript 2015)是JavaScript语言的重大更新,引入了许多新特性,包括语法糖、新数据类型、模块化支持等,显著提升了开发效率和代码可维护性。 核心知识点概览 变量声明 let 和 const 取代 var…...
python打卡day49
知识点回顾: 通道注意力模块复习空间注意力模块CBAM的定义 作业:尝试对今天的模型检查参数数目,并用tensorboard查看训练过程 import torch import torch.nn as nn# 定义通道注意力 class ChannelAttention(nn.Module):def __init__(self,…...

基于Flask实现的医疗保险欺诈识别监测模型
基于Flask实现的医疗保险欺诈识别监测模型 项目截图 项目简介 社会医疗保险是国家通过立法形式强制实施,由雇主和个人按一定比例缴纳保险费,建立社会医疗保险基金,支付雇员医疗费用的一种医疗保险制度, 它是促进社会文明和进步的…...

django filter 统计数量 按属性去重
在Django中,如果你想要根据某个属性对查询集进行去重并统计数量,你可以使用values()方法配合annotate()方法来实现。这里有两种常见的方法来完成这个需求: 方法1:使用annotate()和Count 假设你有一个模型Item,并且你想…...
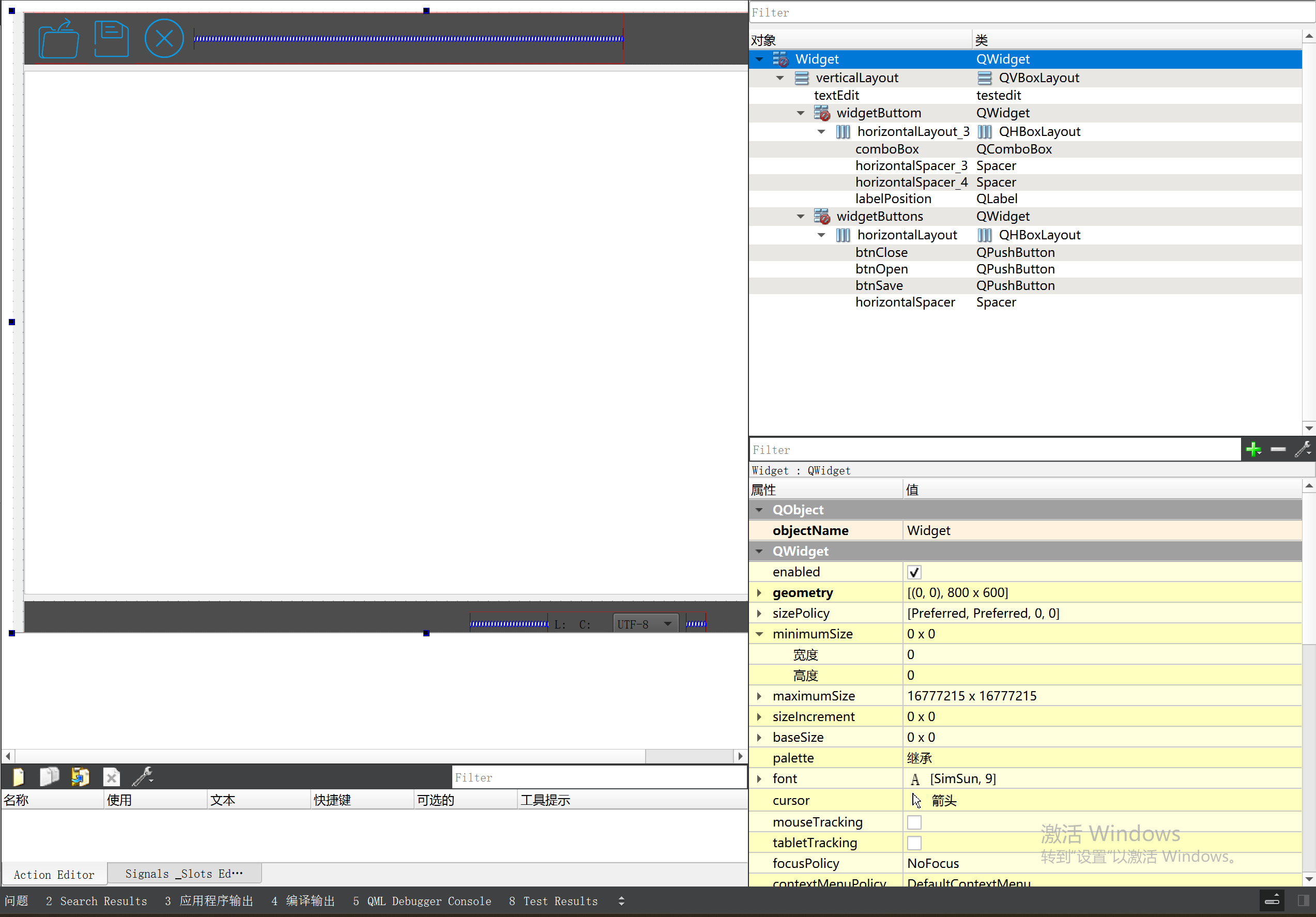
P3 QT项目----记事本(3.8)
3.8 记事本项目总结 项目源码 1.main.cpp #include "widget.h" #include <QApplication> int main(int argc, char *argv[]) {QApplication a(argc, argv);Widget w;w.show();return a.exec(); } 2.widget.cpp #include "widget.h" #include &q…...
指令的指南)
在Ubuntu中设置开机自动运行(sudo)指令的指南
在Ubuntu系统中,有时需要在系统启动时自动执行某些命令,特别是需要 sudo权限的指令。为了实现这一功能,可以使用多种方法,包括编写Systemd服务、配置 rc.local文件或使用 cron任务计划。本文将详细介绍这些方法,并提供…...

Linux云原生安全:零信任架构与机密计算
Linux云原生安全:零信任架构与机密计算 构建坚不可摧的云原生防御体系 引言:云原生安全的范式革命 随着云原生技术的普及,安全边界正在从传统的网络边界向工作负载内部转移。Gartner预测,到2025年,零信任架构将成为超…...
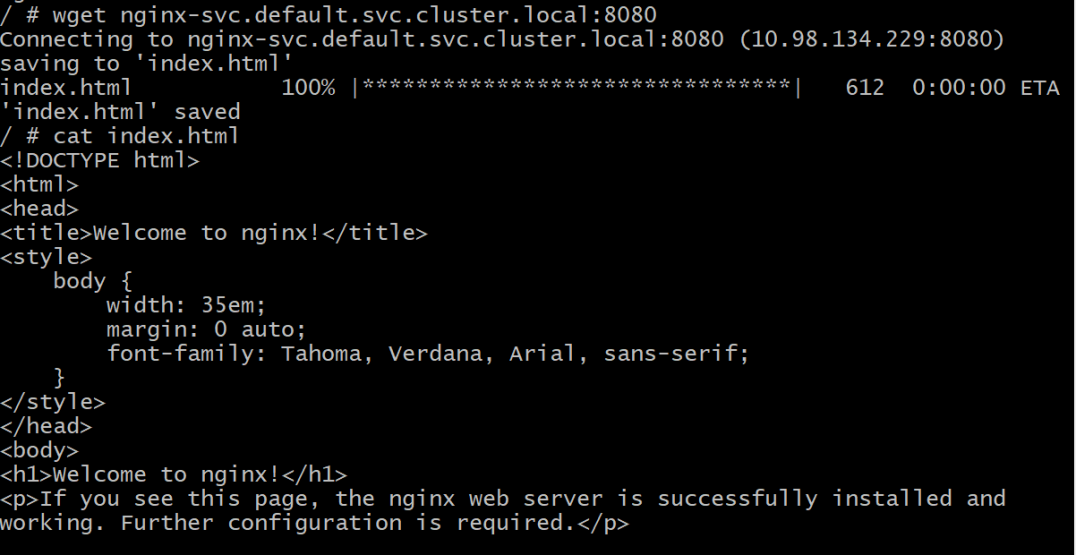
初探Service服务发现机制
1.Service简介 Service是将运行在一组Pod上的应用程序发布为网络服务的抽象方法。 主要功能:服务发现和负载均衡。 Service类型的包括ClusterIP类型、NodePort类型、LoadBalancer类型、ExternalName类型 2.Endpoints简介 Endpoints是一种Kubernetes资源…...