Fei-Fei Li-Lecture 16:3D Vision 【斯坦福大学李飞飞CV课程第16讲:3D Vision】
目录
P1 2D Detection and Segmentation
P2 Video = 2D + time series
P3 Focus on Two Problems
P4 Many more topics in 3D Vision
P5-10 Multi-View CNN
P11 Experiments – Classification & Retrieval
P12 3D Shape Representations
P13--17 3D Shape Representations: Depth Map
Per-Pixel Loss (L2 Distance)
Problem: Scale / Depth Ambiguity
Predicting Depth Maps
P18--26 3D Shape Representations: Surface Normals 曲面法线
3D Shape Representations: Voxels
Processing Voxel Inputs: 3D Convolution
Generating Voxel Shapes: 3D Convolution
P27--34 3D Shape Representations: Point Cloud
Proessing Pointcloud Inputs: PointNet
Generating Pointcloud Outputs
Predicting Point Clouds: Loss Function
P35--51 3D Shape Representations: Triangle Mesh
Predicting Meshes: Pixel2Mesh
Predicting Triangle Meshes: Graph Convolution
Predicting Triangle Meshes: Vertex-Aligned Features
Predicting Meshes: Loss Function
P52--73 3D Shape Prediction: Mesh R-CNN
Mesh R-CNN: Hybrid 3D shape representation
Mesh R-CNN Pipeline
Mesh R-CNN: ShapeNet Results
Datasets for 3D Objects
Datasets for 3D Object Parts
P74--92 3D Shape Representations: Implicit Functions
Algebraic Surfaces (Implicit)
Constructive Solid Geometry (Implicit)
Level Set Methods (Implicit)
NeRF: Representing Scenes as Neural Radiance Fields
P93 Summary: 3D Shape Representations
P1 2D Detection and Segmentation
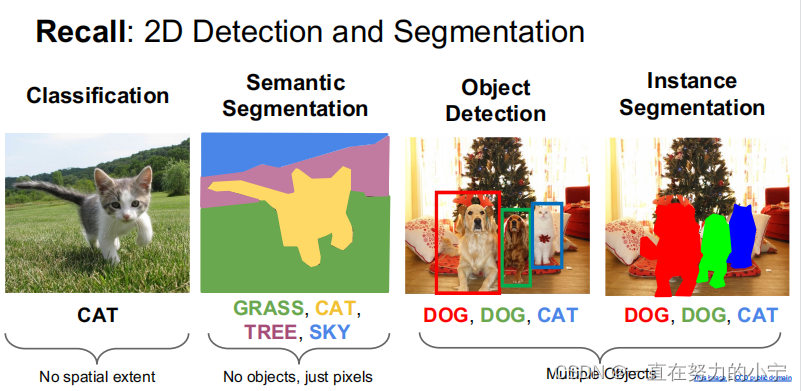
Classification分P类:没有空间信息,只是对一张图片进行分类
Semantic Segmentation语义分割: 没有物体,只有像素点,对像素点进行分类
Object Detection目标检测:直接识别出物体并进行分类
Instance Segmentation:实例分割=目标检测+语义分割 (第一次听说这个)
语义分割只需要分出不同类就行,同类的不同个体不需要分,但是Instance Segmentation在语义分割的基础上又把不同的类进行了分割:目标检测后,需要对检测的部分做进一步的语义分割
P2 Video = 2D + time series
视频就是2D的图像加上了时间序列
P3 Focus on Two Problems
今天需要解决的两个问题
①由一张输入图像得到一个3D模型
②识别3D模型进行类别判定
P4 Many more topics in 3D Vision
P5-10 Multi-View CNN

CNN1:提取图像特征的卷积神经网络
CNN2:生成描述形状符的卷积神经网络
P11 Experiments – Classification & Retrieval

Q:MVCNN? SPH? LFD? 3D ShapeNets? FV?
P12 3D Shape Representations

Q: Voxel Grid? Pointcloud? Mesh? Surface?
A:下面详细讲啦
P13--17 3D Shape Representations: Depth Map

Q:H是Height ? W是Width?
可以使用全卷积神经网络进行深度图预测,得到两个估计的深度图,然后还可以得到每像素Loss
Per-Pixel Loss (L2 Distance)
Q:L2 距离是什么?
Problem: Scale / Depth Ambiguity
Q:具体是什么意思以及怎么解决?
A: 意思大概是单目图像中信息有限
Predicting Depth Maps
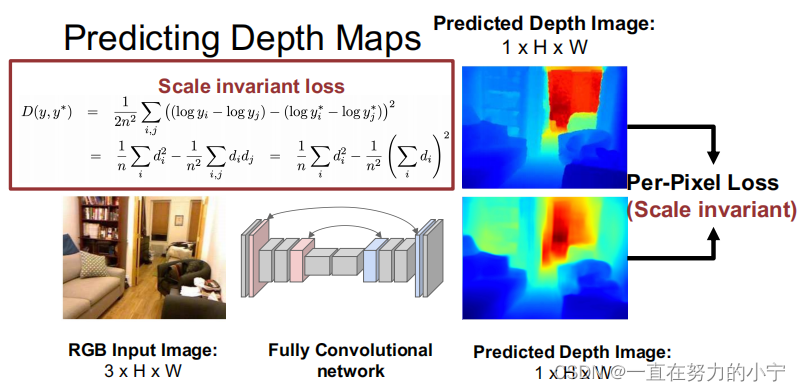
Scale invariant 尺度不变性
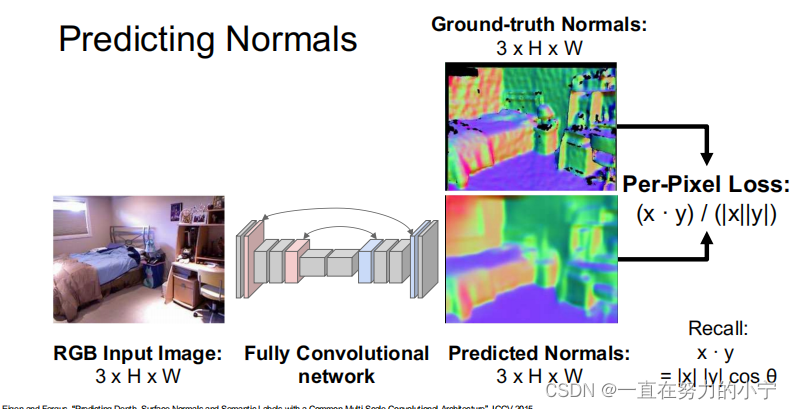
P18--26 3D Shape Representations: Surface Normals 曲面法线
对于每个像素,表面法线给出一个向量,表示该像素的世界上的对象的法向向量
假设 RGB Image为 3 x H x W,那么法线图 Normals: 3 x H x W
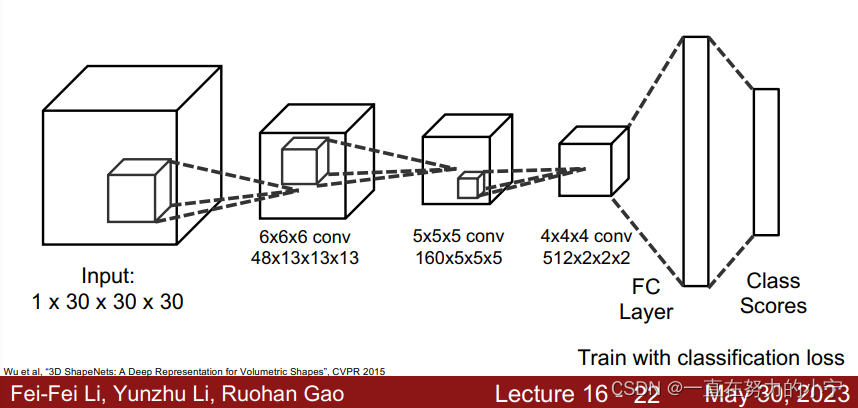
3D Shape Representations: Voxels
• Represent a shape with a V x V x V grid of occupancies 网格表示形状
• Just like segmentation masks in Mask R-CNN, but in 3D! 分割掩码
• (+) Conceptually simple: just a 3D grid! 只是一个3D网格
• (-) Need high spatial resolution to capture fine structures 需要高空间分辨率捕捉精细结构
• (-) Scaling to high resolutions is nontrivial ! 缩放到高分辨率并不容易
Processing Voxel Inputs: 3D Convolution
Generating Voxel Shapes: 3D Convolution

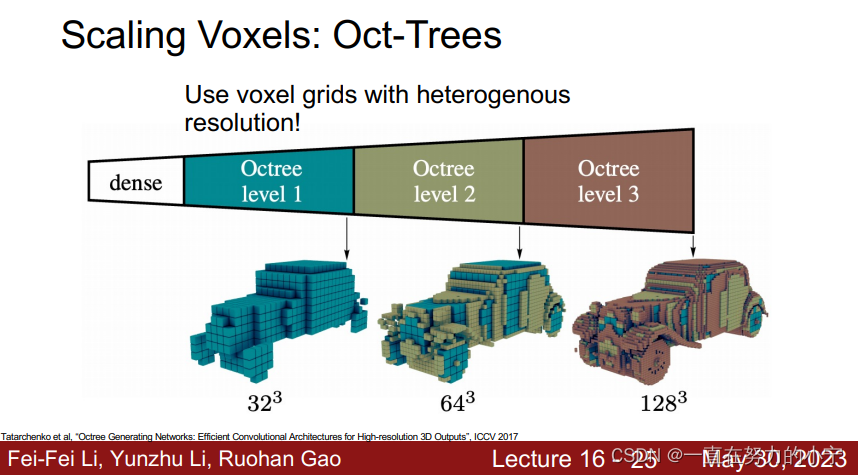
Voxel Problems: Memory Usage
Storing 1024(3次方) voxel grid takes 4GB of memory
Scaling Voxels: Oct-Trees 八叉树
Q: 没太看懂这个Oct-Trees
P27--34 3D Shape Representations: Point Cloud
• Represent shape as a set of P points in 3D space
• (+) Can represent fine structures without huge numbers of points
• ( ) Requires new architecture, losses, etc
• (-) Doesn’t explicitly represent the surface of the shape: extracting a mesh for rendering or other applications requires post-processing
提取网格为渲染或其他应用提取网格需要进行后处理
Proessing Pointcloud Inputs: PointNet
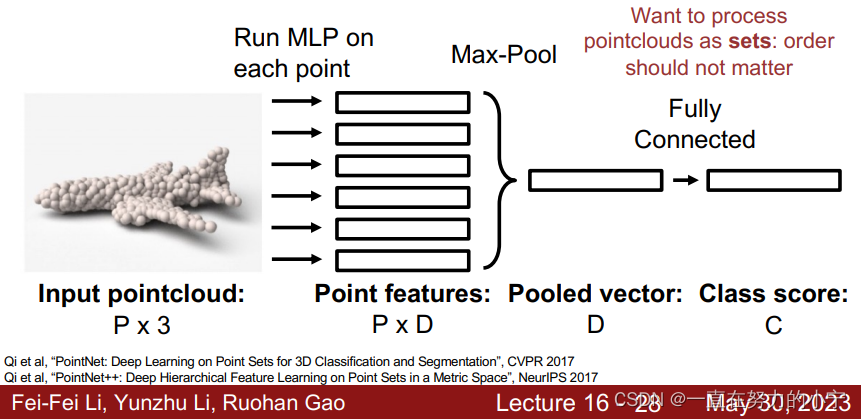
MLP ?
Max-Pool?
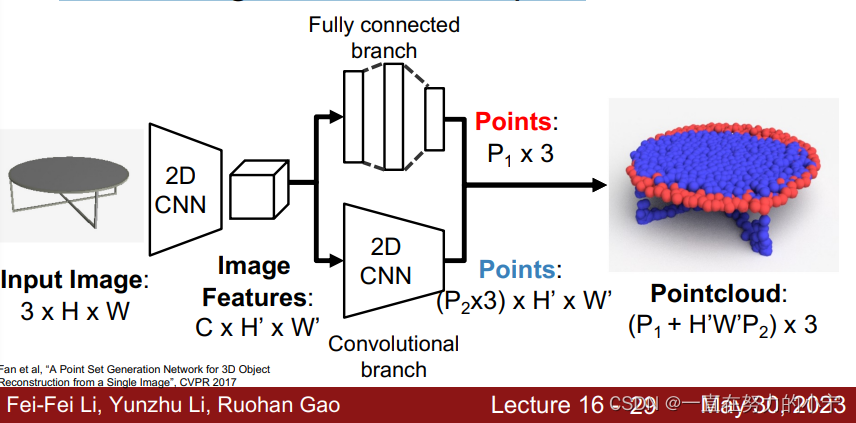
Generating Pointcloud Outputs
Predicting Point Clouds: Loss Function


P35--51 3D Shape Representations: Triangle Mesh

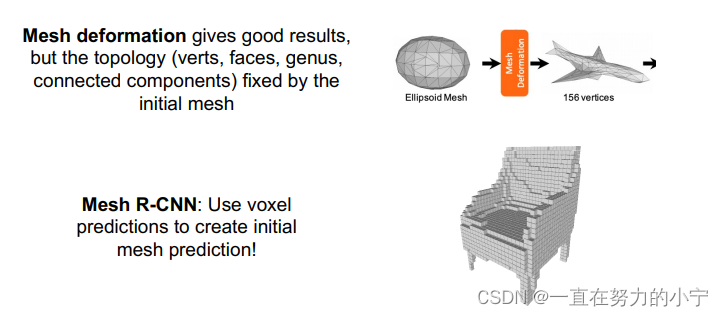
Predicting Meshes: Pixel2Mesh
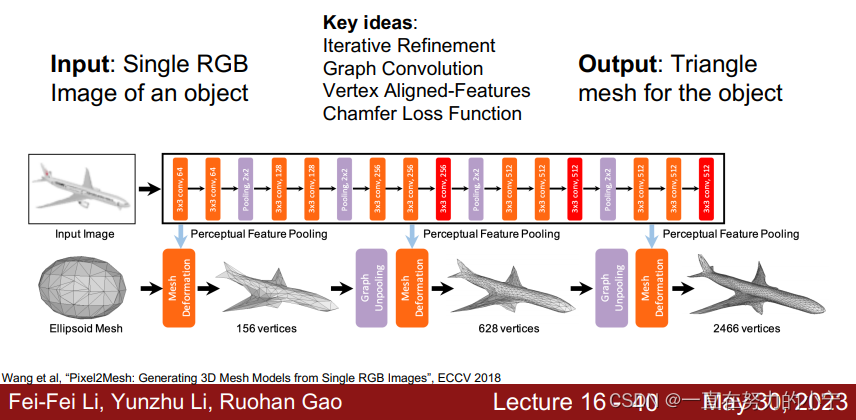
Idea #1: Iterative mesh refinement
Start from initial ellipsoid mesh Network predicts offsets for each vertex Repeat.
从初始椭球网格开始 网络预测每个顶点的偏移 重复。
Predicting Triangle Meshes: Graph Convolution
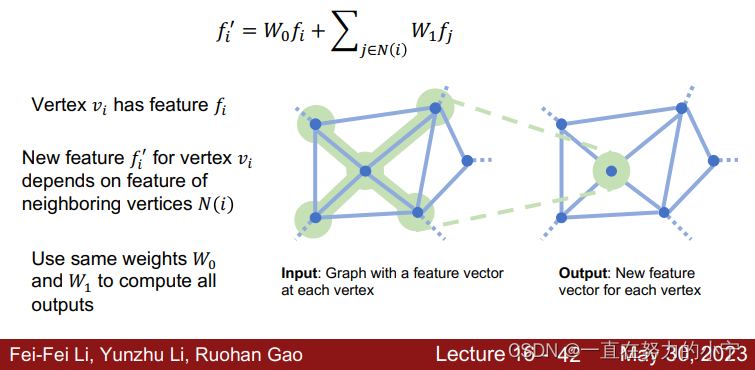

Problem: How to incorporate image features?
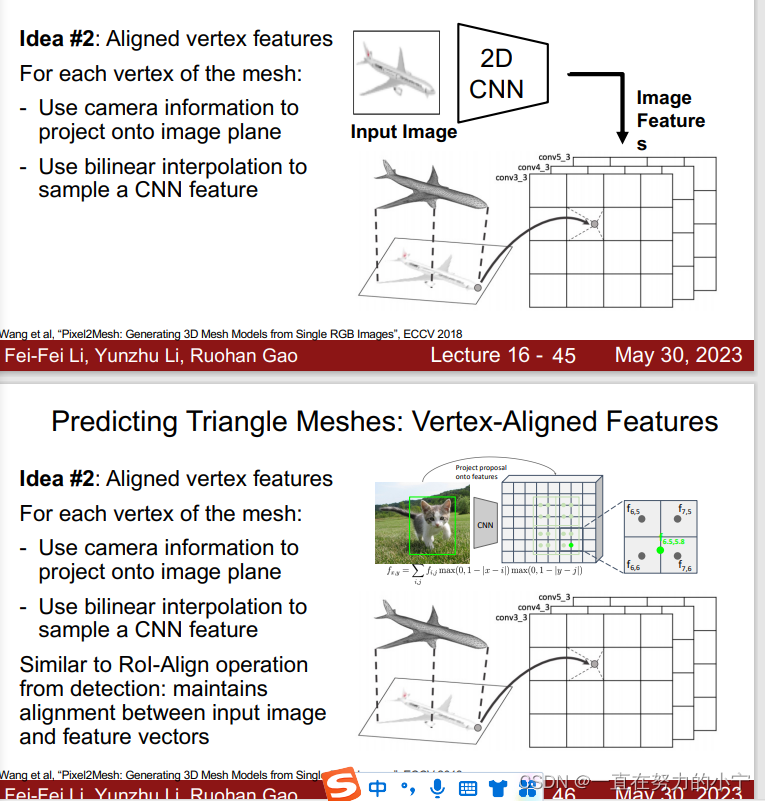
Predicting Triangle Meshes: Vertex-Aligned Features
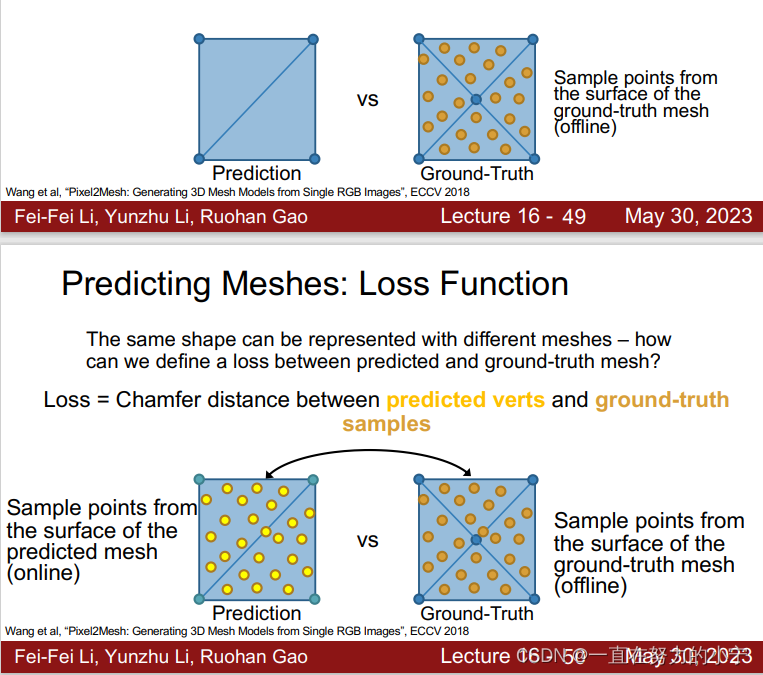
Predicting Meshes: Loss Function
The same shape can be represented with different meshes – how can we define a loss between predicted and ground-truth mesh?
Idea: Convert meshes to pointclouds, then compute loss
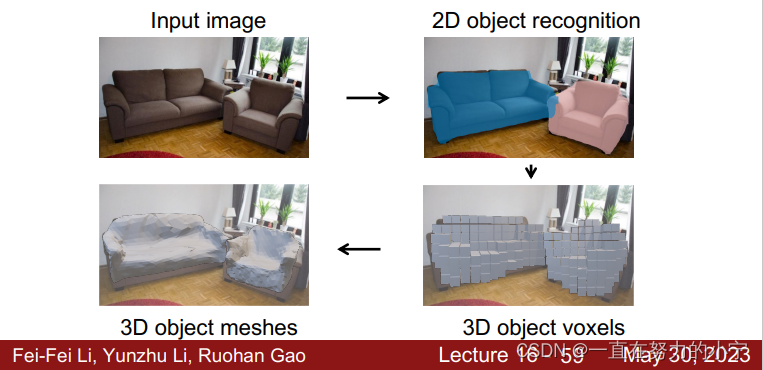
P52--73 3D Shape Prediction: Mesh R-CNN
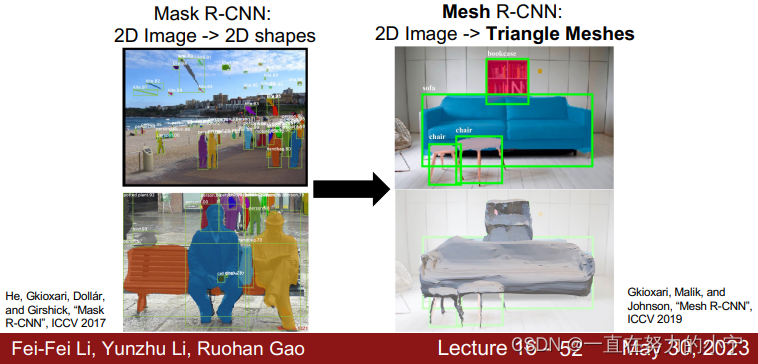

Mesh R-CNN: Hybrid 3D shape representation
Mesh R-CNN Pipeline
Mesh R-CNN: ShapeNet Results

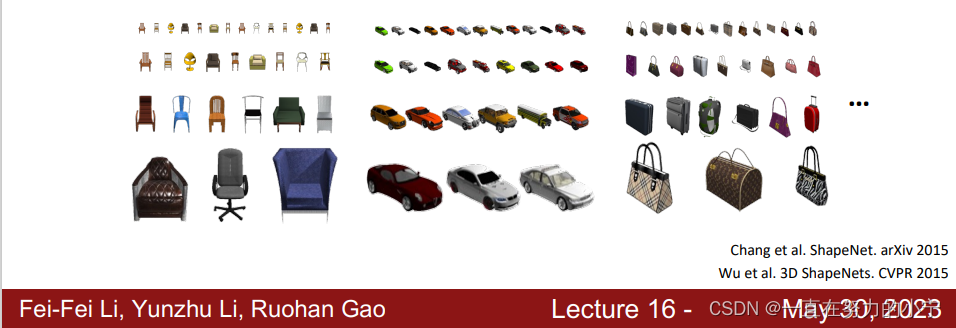
Datasets for 3D Objects
• Large-scale Synthetic Objects: ShapeNet, 3M models
• ModelNet: absorbed by ShapeNet
• ShapeNetCore: 51.3K models in 55 categories
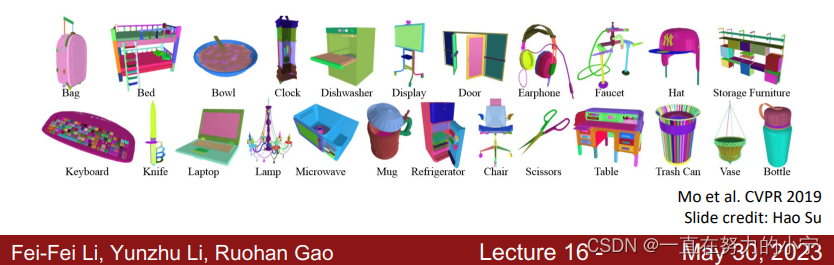
Datasets for 3D Object Parts
Fine-grained Parts: PartNet
• Fine-grained (+mobility)
• Instance-level
• Hierarchical
P74--92 3D Shape Representations: Implicit Functions
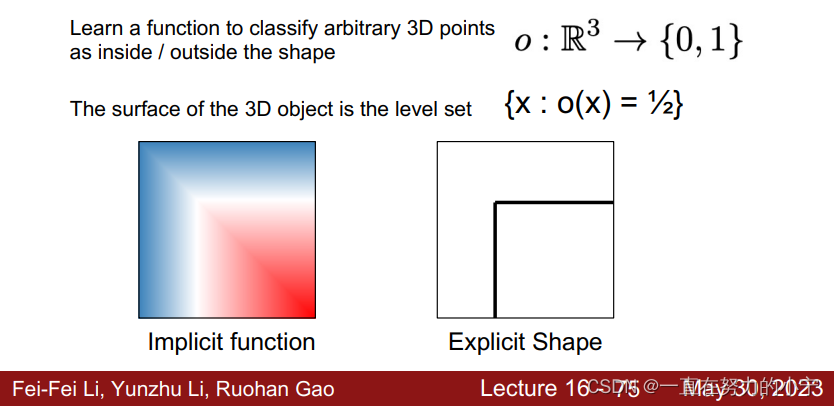
Algebraic Surfaces (Implicit)

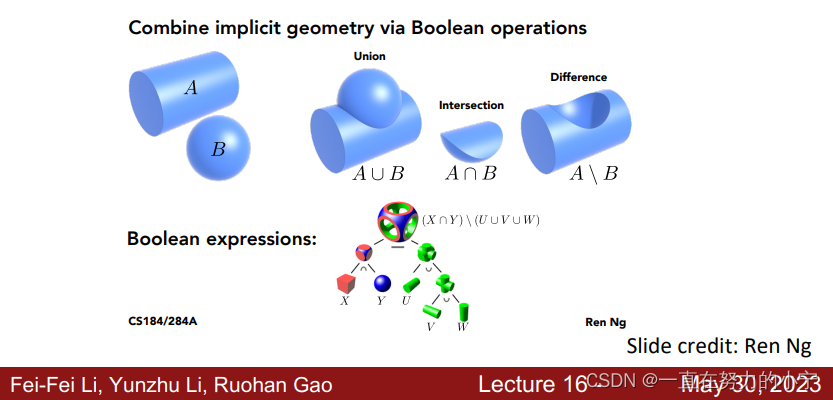
Constructive Solid Geometry (Implicit)
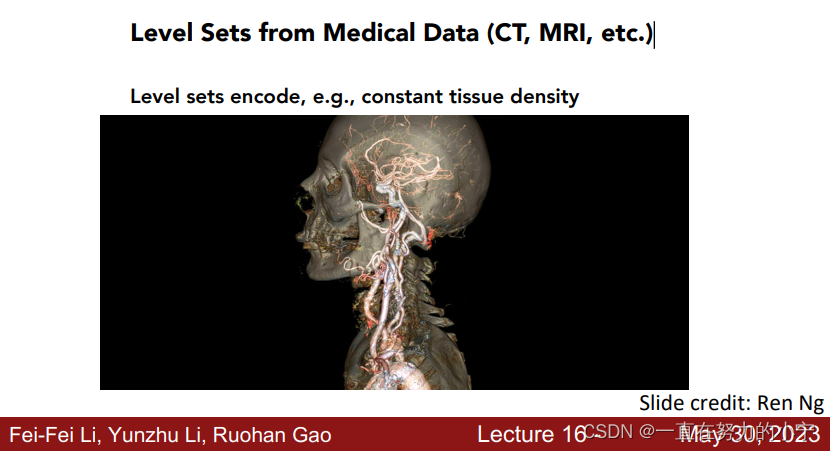
Level Set Methods (Implicit)


NeRF: Representing Scenes as Neural Radiance Fields


P93 Summary: 3D Shape Representations

相关文章:
Fei-Fei Li-Lecture 16:3D Vision 【斯坦福大学李飞飞CV课程第16讲:3D Vision】
目录 P1 2D Detection and Segmentation P2 Video 2D time series P3 Focus on Two Problems P4 Many more topics in 3D Vision P5-10 Multi-View CNN P11 Experiments – Classification & Retrieval P12 3D Shape Representations P13--17 3D Shape Represen…...
【计算机视觉】YOLO 入门:训练 COCO128 数据集
一、COCO128 数据集 我们以最近大热的YOLOv8为例,回顾一下之前的安装过程: %pip install ultralytics import ultralytics ultralytics.checks()这里选择训练的数据集为:COCO128 COCO128是一个小型教程数据集,由COCOtrain2017中…...

【数分面试答疑】XX场景如何分析问题的思考
问题: 如何分析消费贷客户的用款活跃度,简单列出分析报告的思路框架 解答 这个问题是一个典型的数据分析类的面试问题,主要考察面试者对于消费贷客户的用款活跃度分析的理解和方法,以及对于数据分析报告的撰写和呈现的能力。回…...

html中如何用vue语法,并使用UI组件库 ,html中引入vue+ant-design-vue或者vue+element-plus
html中如何用vue语法,并使用UI组件库 前言 先说一下本次应用的场景,本次项目中,需要引入github中别人写好的插件,插件比较大,没有方法直接在自己项目中,把别人的项目打包合并生成html(类似于前…...
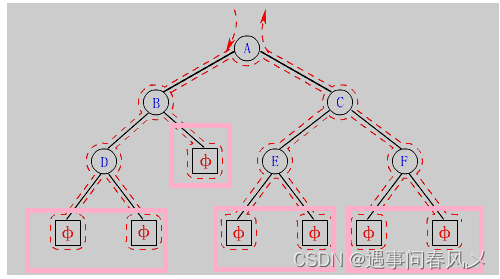
【数据结构】二叉数的存储与基本操作的实现
文章目录 🍀二叉树的存储🌳二叉树的基本操作🐱👤二叉树的创建🐱👓二叉树的遍历🎡前中后序遍历📌前序遍历📌中序遍历📌后续遍历 🛫层序遍历&am…...
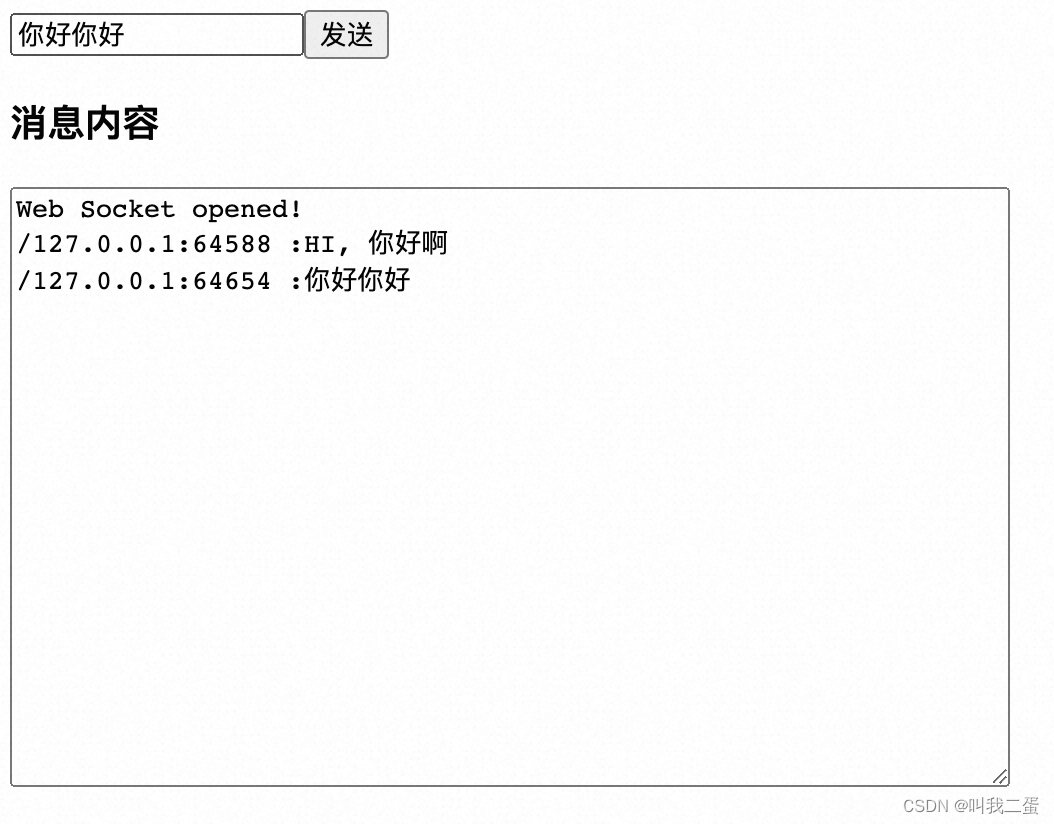
使用 Netty 实现群聊功能的步骤和注意事项
文章目录 前言声明功能说明实现步骤WebSocket 服务启动Channel 初始化HTTP 请求处理HTTP 页面内容WebSocket 请求处理 效果展示总结 前言 通过之前的文章介绍,我们可以深刻认识到Netty在网络编程领域的卓越表现和强大实力。这篇文章将介绍如何利用 Netty 框架开发一…...

一篇文章搞定《WebView的优化及封装》
一篇文章搞定《WebView的优化及封装》 前言WebView的过程分析确定优化方案一、预加载,复用缓冲池(初始化优化)优化的解析说明具体的实现 二、预置模版(请求、渲染优化)优化的解析说明具体的实现1、离线包2、预获取数据…...
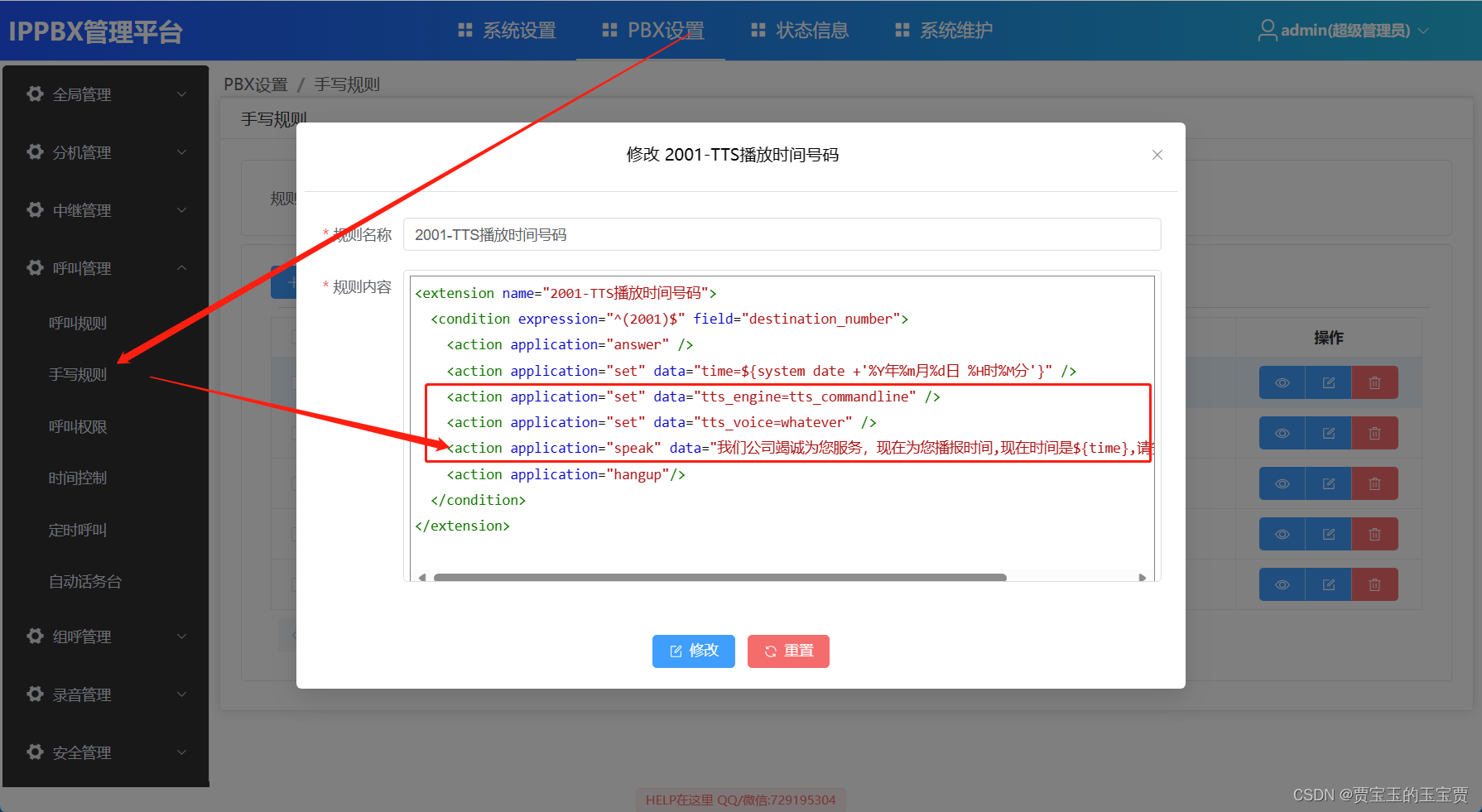
FreeSWITCH 1.10.10 简单图形化界面5 - 使用百度TTS
FreeSWITCH 1.10.10 简单图形化界面5 - 使用百度TTS 0、 界面预览1、注册百度AI开放平台,开通语音识别服务2、获取AppID/API Key/Secret Key3、 安装百度语音合成sdk4、合成代码5、在PBX中使用百度TTS6、音乐文件-TTS7、拨号规则-tts_command 0、 界面预览 http://…...

DP读书:不知道干什么就和我一起读书吧
DP读书:不知道干什么就和我一起读书吧 为啥写博客:好处一:记录自己的学习过程优点二:让自己在各大社群里不那么尴尬推荐三:坚持下去,找到一个能支持自己的伙伴 虽然清楚知识需要靠时间沉淀,但在…...
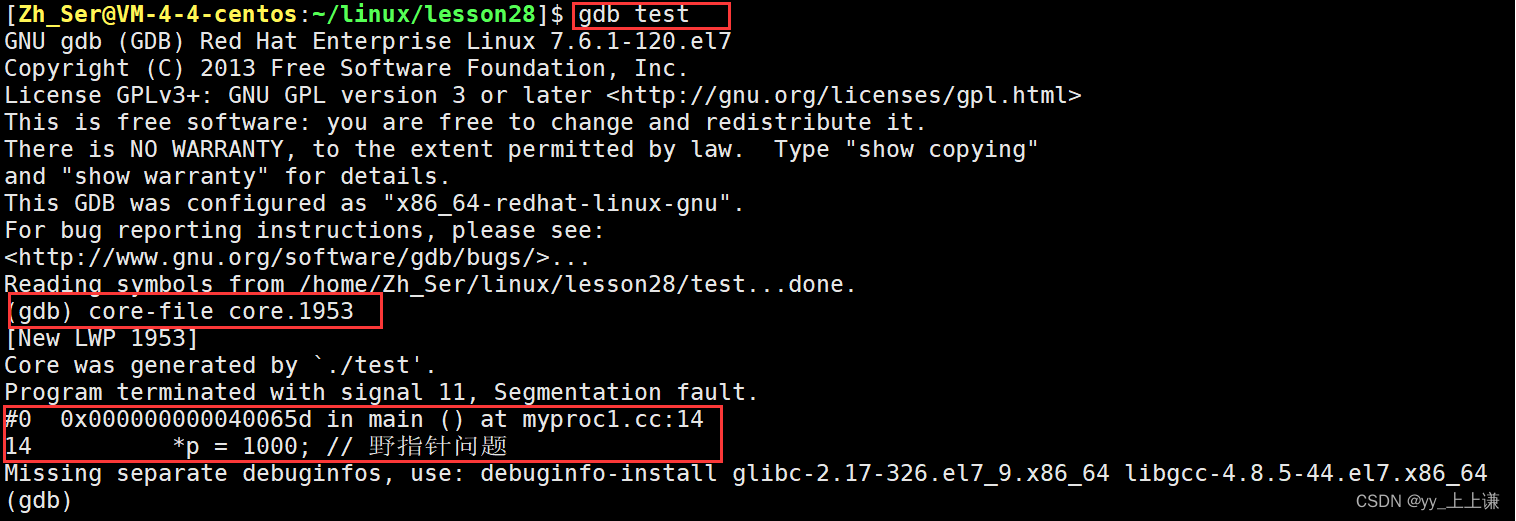
【Linux】进程通信 — 信号(上篇)
文章目录 📖 前言1. 什么是信号1.1 认识信号:1.2 信号的产生:1.3 信号的异步:1.4 信号的处理: 2. 前后台进程3. 系统接口3.1 signal:3.1 - 1 不能被捕捉的信号 3.2 kill:3.2 - 1 killall 3.3 ra…...

JS弃之可惜食之无味的代码冷知识
JS代码冷知识大全 1. 变量提升与暂死 在JavaScript中,变量提升是一个有趣且容易让人误解的概念。在代码中,变量和函数声明会在其所在作用域的顶部被提升,但是初始化并不会被提升。这可能导致在声明之前就使用变量,结果为undefin…...

数据结构初阶--排序
目录 一.排序的基本概念 1.1.什么是排序 1.2.排序算法的评价指标 1.3.排序的分类 二.插入排序 2.1.直接插入排序 2.2.希尔排序 三.选择排序 3.1.直接选择排序 3.2.堆排序 重建堆 建堆 排序 四.交换排序 4.1.冒泡排序 4.2.快速排序 快速排序的递归实现 法一&a…...

赴日IT 如何提高去日本做程序员的几率?
其实想去日本做IT工作只要满足学历、日语、技术三个必要条件,具备这些条件应聘就好,不具备条件你就想办法具备这些条件,在不具备条件之前不要轻易到日本去,日本IT行业虽然要求技术没有国内那么高,但也不是随便好进入的…...

c# 使用了 await、asnync task.run 三者结合使用
在 C# 异步编程中,await 和 async 关键字结合使用可以让你更方便地编写异步代码,而无需直接使用 Task.Run。然而,有时候你可能仍然需要使用 Task.Run 来在后台线程上执行某些工作,这取决于你的代码逻辑和需求。 await 和 async 关…...

C#获取屏幕缩放比例
现在1920x1080以上分辨率的高分屏电脑渐渐普及了。我们会在Windows的显示设置里看到缩放比例的设置。在Windows桌面客户端的开发中,有时会想要精确计算窗口的面积或位置。然而在默认情况下,无论WinForms的Screen.Bounds.Width属性还是WPF中SystemParamet…...
Rn实现省市区三级联动
省市区三级联动选择是个很频繁的需求,但是查看了市面上很多插件不是太老不维护就是不满足需求,就试着实现一个 这个功能无任何依赖插件 功能略简单,但能实现需求 核心代码也尽力控制在了60行左右 pca-code.json树型数据来源 Administrative-d…...

SpringCloud学习笔记(十)_SpringCloud监控
今天我们来学习一下actuator这个组件,它不是SpringCloud之后才有的,而是SpringBoot的一个starter,Spring Boot Actuator。我们使用SpringCloud的时候需要使用这个组件对应用程序进行监控与管理 在SpringBoot2.0版本中,actuator可以…...

测试理论与方法----测试流程的第二个环节:测试计划
二、软件测试分类与测试计划 1、软件测试的分类(理解掌握) 根绝需求规格说明书,在设计阶段会产出的两个文档: 概要设计(HLD):设计软件的结构,包含软件的组成,模块之间的层次关系,模块与模块之间的调用关系…...
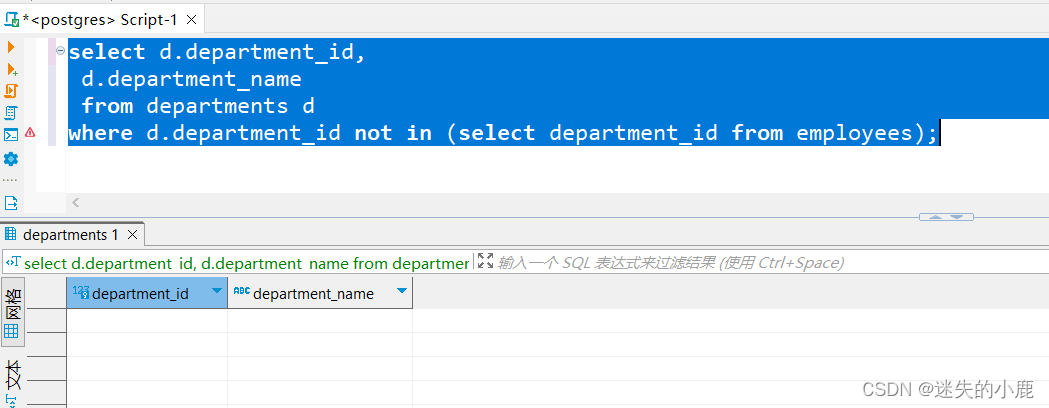
postgresql-子查询
postgresql-子查询 简介派生表IN 操作符ALL 操作符ANY 操作符关联子查询横向子查询EXISTS 操作符 简介 子查询(Subquery)是指嵌套在其他 SELECT、INSERT、UPDATE 以及 DELETE 语句中的 查询语句。 子查询的作用与多表连接查询有点类似,也是为…...

Linux 系统运维工具之 OpenLMI
一、前要 OpenLMI(全称 Open Linux Management Infrastructure)即开放式的 Linux 管理基础架构。OpenLMI 是一个开源项目,用于管理 Linux 系统管理的通用基础架构。它建立在现有工具基础上,充当抽象层,以便向系统管理…...

ssc377d修改flash分区大小
1、flash的分区默认分配16M、 / # df -h Filesystem Size Used Available Use% Mounted on /dev/root 1.9M 1.9M 0 100% / /dev/mtdblock4 3.0M...

STM32+rt-thread判断是否联网
一、根据NETDEV_FLAG_INTERNET_UP位判断 static bool is_conncected(void) {struct netdev *dev RT_NULL;dev netdev_get_first_by_flags(NETDEV_FLAG_INTERNET_UP);if (dev RT_NULL){printf("wait netdev internet up...");return false;}else{printf("loc…...

macOS多出来了:Google云端硬盘、YouTube、表格、幻灯片、Gmail、Google文档等应用
文章目录 问题现象问题原因解决办法 问题现象 macOS启动台(Launchpad)多出来了:Google云端硬盘、YouTube、表格、幻灯片、Gmail、Google文档等应用。 问题原因 很明显,都是Google家的办公全家桶。这些应用并不是通过独立安装的…...
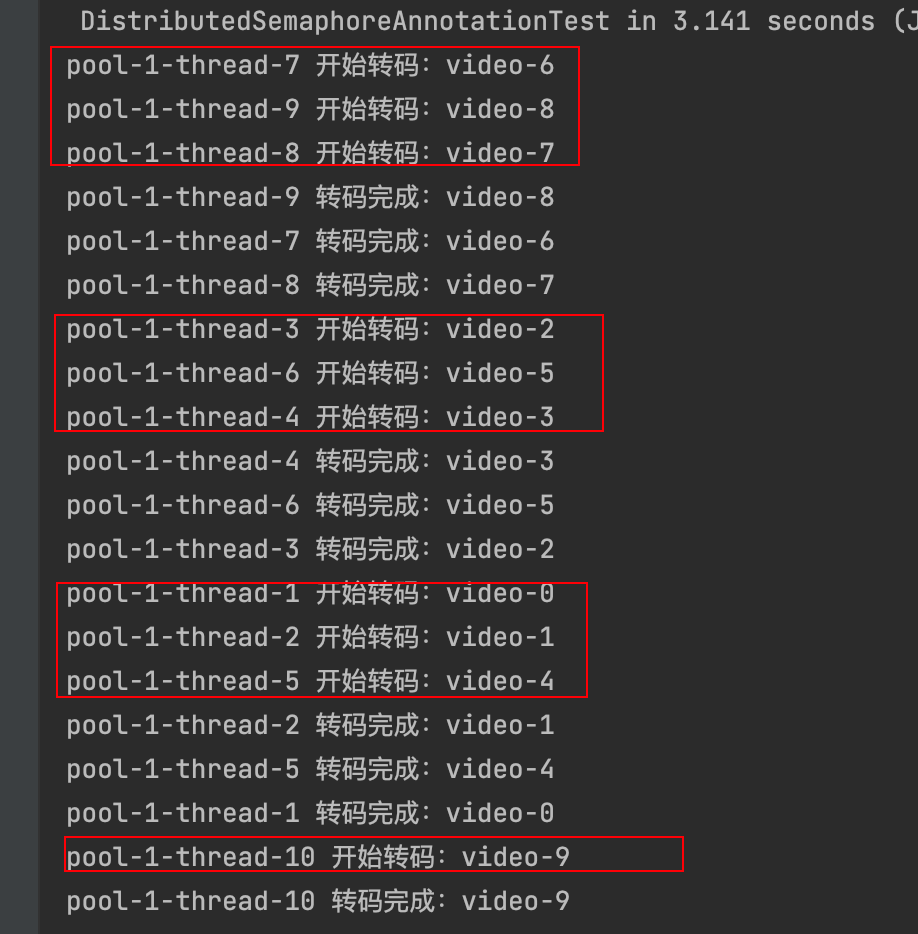
令牌桶 滑动窗口->限流 分布式信号量->限并发的原理 lua脚本分析介绍
文章目录 前言限流限制并发的实际理解限流令牌桶代码实现结果分析令牌桶lua的模拟实现原理总结: 滑动窗口代码实现结果分析lua脚本原理解析 限并发分布式信号量代码实现结果分析lua脚本实现原理 双注解去实现限流 并发结果分析: 实际业务去理解体会统一注…...

【OSG学习笔记】Day 16: 骨骼动画与蒙皮(osgAnimation)
骨骼动画基础 骨骼动画是 3D 计算机图形中常用的技术,它通过以下两个主要组件实现角色动画。 骨骼系统 (Skeleton):由层级结构的骨头组成,类似于人体骨骼蒙皮 (Mesh Skinning):将模型网格顶点绑定到骨骼上,使骨骼移动…...

MySQL 主从同步异常处理
阅读原文:https://www.xiaozaoshu.top/articles/mysql-m-s-update-pk MySQL 做双主,遇到的这个错误: Could not execute Update_rows event on table ... Error_code: 1032是 MySQL 主从复制时的经典错误之一,通常表示ÿ…...

es6+和css3新增的特性有哪些
一:ECMAScript 新特性(ES6) ES6 (2015) - 革命性更新 1,记住的方法,从一个方法里面用到了哪些技术 1,let /const块级作用域声明2,**默认参数**:函数参数可以设置默认值。3&#x…...

2025年低延迟业务DDoS防护全攻略:高可用架构与实战方案
一、延迟敏感行业面临的DDoS攻击新挑战 2025年,金融交易、实时竞技游戏、工业物联网等低延迟业务成为DDoS攻击的首要目标。攻击呈现三大特征: AI驱动的自适应攻击:攻击流量模拟真实用户行为,差异率低至0.5%,传统规则引…...

写一个shell脚本,把局域网内,把能ping通的IP和不能ping通的IP分类,并保存到两个文本文件里
写一个shell脚本,把局域网内,把能ping通的IP和不能ping通的IP分类,并保存到两个文本文件里 脚本1 #!/bin/bash #定义变量 ip10.1.1 #循环去ping主机的IP for ((i1;i<10;i)) doping -c1 $ip.$i &>/dev/null[ $? -eq 0 ] &&am…...
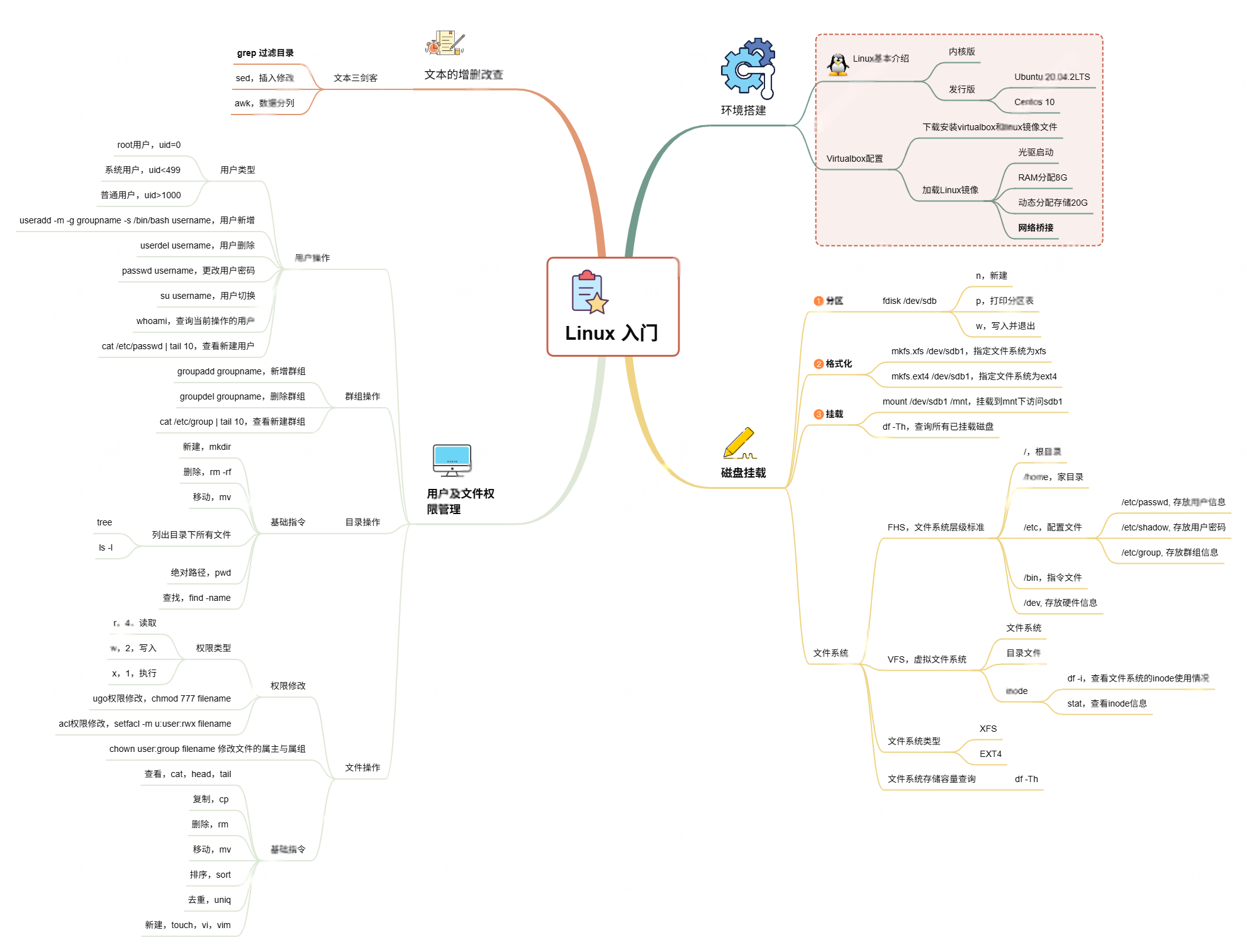
Linux入门课的思维导图
耗时两周,终于把慕课网上的Linux的基础入门课实操、总结完了! 第一次以Blog的形式做学习记录,过程很有意思,但也很耗时。 课程时长5h,涉及到很多专有名词,要去逐个查找,以前接触过的概念因为时…...