高精度地图定位在高速公路自动驾驶系统中的应用
近年来随着汽车保有量不断增加,随之而来的是: ( 1) 严重的交通拥堵,通行效率低下,用在通行上的时间不断增加; ( 2) 交通事故频发,交通事故导致的伤亡人数和费用不断增加,而且绝大多数事故是由人为因素导致的; ( 3) 大气污染日益严重。另外,老龄化严重,即将成为全球面临的一大问题,老年人等无法驾驶汽车人群的出行问题亟待解决。自动驾驶作为解决以上问题的一个重要方法,已经成为全球汽车产业的战略发展方向。
除了各大车企均将自动驾驶作为公司核心发展领域,众多汽车零部件供应商、互联网企业和创业公
司也在集中发展自动驾驶相关业务。高精度地图和定位系统是自动驾驶的一个关键感知输入,可以提供前方数千米的道路先验信息,包括道路、车道、交通标志和道路附属设施等信息。
一、自动驾驶和高精度地图定位系统的发展现状
1. 1 自动驾驶系统发展现状
自动驾驶系统包括L3 - L5 级驾驶自动化系统( 基于国际自动机械工程师协会SAE J 3016和汽车驾驶自动化分级) ,如表1 所示,自动驾驶系统激活期间,目标和事件探测与响应、车辆的横向和纵向运动控制均由系统负责。自动驾驶系统由自动驾驶域控制器、传感感知子系统、控制执行子系统、人机交互子系统和供电电源子系统等组成。传感感知子系统是自动驾驶系统的一个关键部分,负责系统的感知,一般由单目摄像头、双目摄像头、夜视摄像头、毫米波雷达、激光雷达、超声波雷达、高精度地图和定位、V2X 等组成,根据系统的感知需求选择合适的传感器组合和各传感`器的详细参数。
表1 驾驶自动化等级与划分要素的关系

由于高速公路工况相对城市工况更加单一且规范,属于封闭场景,车辆行驶方向是单一的,与对向行驶车辆有硬隔离,允许行驶车辆类型较少,道路的坡度和曲率、车道宽度等均有法规统一要求,所以目前L3 级高速公路自动驾驶是各车企的主要研发方向之一。2017 年底奥迪宣布交通拥堵场景的L3 级高速公路自动驾驶TJP( Traffic JamPilot,速度范围0 - 60 km/h) 达到量产状态,奔驰和宝马计划在2021 年推出全速的L3 级高速公路自动驾驶。L3 级自动驾驶要求当系统发出接管请求时,驾驶员需要在一定时间内完成接管,同时还需要保证只能在地理围栏内才能开启,在地理围
栏外开启存在风险。高精度地图和定位系统是保证自动驾驶只能在地理围栏内开启的最佳手段。
本文分析的是高精度地图和定位在L3 级高速公路自动驾驶中的应用。自动驾驶的另一个研究方向是城郊工况、固定区域内的L4 级自动驾驶。L4 级自动驾驶是指不需要驾驶员做动态驾驶任务接管,系统可应对超出系统设计运行范围、系统失效等情况,对系统的冗余设计要求更高。城郊工况相对高速工况更复杂,但速度范围更低。谷歌Waymo、百度、通用汽车和福特等企业均在重点开发L4 级自动驾驶,截止2019 年底,Waymo 实车测试里程已达到2 000万英里( 3 200 万千米) ,Waymo 2019 年的接管率为0. 076,即每13 219 英里( 21 150 千米) 需要人工介入一次。高精度地图和定位也是L4 级自动驾驶必要的组成部分,本文不展开应用分析。
1. 2 高精度地图定位系统的发展现状
1. 2. 1 高精度地图的发展现状
美国很早就针对高精度地图开始了布局与研发,参与者除了Mapbox 等传统导航企业,还有
Waymo、Ushr、通用汽车、福特、Civil Maps、DeepMap等企业。日本政府和私营行业基金共同创立的投资基金日本创新网络公司、三菱电机、丰田等多企业联合成立了Dynamic Map Planning 公司,将高精度地图推向产业化。欧洲的Here 和TomTom 公司,国内的高德、百度、四维图新等公司,在高精度地图方面布局也较早[3]。高德在2018 年已量产高精度地图,百度的高精度地图产品即将在2020年量产。
目前L3 级自动驾驶一般使用的是矢量高精度地图,L4 级自动驾驶一般使用的是点云和矢量两种格式的高精度地图。
L3 级自动驾驶使用的矢量高精度地图相比普通导航地图和ADAS 地图的要素更多,相对精度和绝对精度更高。
在地图要素组成方面,导航地图包含道路级路网信息以及供用户使用的POI 信息。ADAS 地图包含道路级路网、坡度、曲率、限速和车道数量等信息。高精度地图除了包括ADAS 地图外,还具有车道级路网、详细的车道模型( 所有车道线和路沿/护栏的形状点或几何信息、车道级曲率、坡度、限速、限高等) 以及用于高精度定位的特征信息,未来还会有车道级实时动态信息。
在相对精度和绝对精度方面,L3 级自动驾驶量产使用的高精度地图,目前行业水平是绝对精
度1 m( 2 Sigma) 和相对精度20 cm( 2 Sigma) 。
1. 2. 2 高精度定位的发展现状
普通GNSS 因卫星星历误差、卫星钟差、电离层折射、对流层折射、多路径效应和接收设备误差
等导致绝对定位结果误差较大,一般在2 - 10 m。
目前常用实时动态载波相位差分技术(RTK) 修正以上误差,RTK 根据车辆位置将基准站采集的载
波相位观测值发播给车辆,车辆通过RTK 解算算法计算出高精度绝对位置信息。开阔场景下绝对定位精度一般可达到1 m( 2 Sigma) 。
如果仅基于GNSS /RTK 和高精度地图进行定位,在一些场景( 比如高速公路旁有并行辅路) 下会
存在道路定位错误的问题。因此需要结合特征匹配定位的方法,提高定位的准确率。目前量产车辆上智驾传感器中可输出检测信息的是前置摄像头,前置摄像头可输出4 条车道线( 本车道左右两条车道线、旁车道的左左和右右车道线) 和交通标志等信息,通过将车道线的类型( 虚线、实线、虚实线、实虚线等) 、几何信息( 车道宽度、车道线航向角和曲率等) 和颜色( 白色、黄色等) 与高精度地图数据进行匹配以确定本车位置。但摄像头易受光照、车辆遮挡等因素影响,后续需要结合激光雷达和毫米波雷达等其他传感器探测信息提高定位的鲁棒性。
2 高精度地图定位技术及其在自动驾驶系统上的应用
2. 1 高精度地图和定位方案的关键技术
L3 级自动驾驶采用多传感器融合的高精度定位方案。基于多传感器信息融合的特征信息进行高精度定位,特征信息包括车道线属性( 几何参数、类型和颜色等) 、车道属性( 宽度等) 、交通标志、交通杆、护栏、路沿等( 见图1) ,特征信息将由摄像头、毫米波雷达、激光雷达等传感器检测。
通过GNSS /RTK 获得绝对位置信息,绝对位置相关信息包括定位状态、定位质量、当前定位使用的卫星数、经度、纬度、速度、精度因子等。绝对位置信息和基于IMU、轮速、方向盘转角等航迹推算信息进行信息融合,获得绝对定位结果。基于绝对定位结果提取一定范围的高精度地图数据,与车载传感器检测的特征信息进行匹配,特征匹配完成后,确定车辆的道路级定位( 哪个道路) 、车道级定位( 哪个车道) 和车道内定位( 横向位置、纵向位置和航向角) 结果。因为采用的是多传感器融合( 摄像头、毫米波雷达、激光雷达、IMU、GNSS /RTK 等) 方案,当某个传感器在一定时间内出现无效状况( 比如摄像头因强光导致车道线检测置信度过低或者过遮挡环境导致GNSS /RTK 无有效数据) 时,系统依旧可以维持高精度定位结果。多传感器融合算法是基于各个传感器信息进行高精度定位的关键,融合算法需要平衡各个传感器在不同环境下( 输入信息置信度不同) 的差异,因此基于多传感器融合的高精度定位方案的鲁棒性和可靠性较好。融合算法具有多元变化的特点,针对不同的传感器配置,可以使用松耦合或紧耦合的方式对传感器数据做不同层级的融合,而多传感器融合在数学方法上也有多种选择,比如卡尔曼滤波、粒子滤波、多贝叶斯估计方法等。其中一个关键点是自动驾驶域控制器和高精度地图定位系统要进行时间同步,从各传感器环境探测时刻到高精度定位系统接收到特征信息会有一定的时间延迟,时间同步方案有硬同步和软同步方案,硬同步一般采用的是硬线将两个控制器进行同步,软同步是采用Autosar 标准协议实现两个控制器的同步。
2. 2 高精度地图和定位在L3 级高速公路自动驾驶系统中的应用
高精度地图和定位在L3 级高速公路自动驾驶系统中的应用可分为两部分: 一是自动驾驶系统地理围栏的判定; 二是提供前方道路的高精度地图信息。
2. 2. 1 地理围栏判定
只有高精度地图才包含车道级属性,因此车道级地理围栏的判定只有基于高精度地图和定位才能实现,同时高精度地图定位可实现道路级地理围栏的判定。道路级和车道级地理围栏如表2和表3 所示。
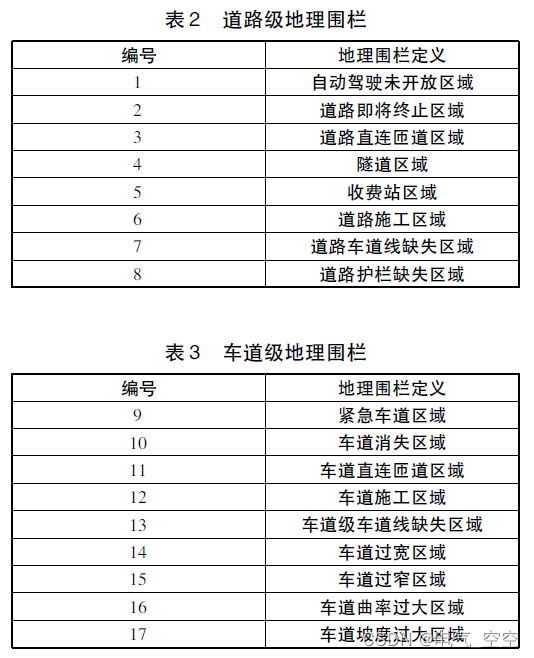
( 1) 地理围栏1: 自动驾驶未开放区域
不同区域、不同道路可能具有特殊的场景,自动驾驶量产前需要经过大规模、足够里程的道路和仿真验证,因此自动驾驶系统比较适合在不同区域或道路逐步开放,如图2 所示,可以限定在区域A 内可开启自动驾驶、在区域B 内不允许开启自动驾驶,也可通过限定在道路A 部分路段可开启自动驾驶、在道路A 其他路段不允许开启自动驾驶。
( 2) 地理围栏2: 道路即将终止区域
自动驾驶系统需要保证在高速公路终点前完成驾驶员接管或者安全停车,高精度地图定位系统需要将道路即将终止区域划为地理围栏外,可提前提醒驾驶员接管,如图3 所示。
( 3) 地理围栏3: 道路直连匝道区域
针对不支持匝道或者自动下匝道的自动驾驶系统,由于匝道场景不同于高速公路主干路,比如匝道的曲率更大等,一些道路会直接连接匝道( 高速公路主干路消失) ,自动驾驶系统需要保证在进入匝道前完成驾驶员接管或者安全停车,高精度地图定位系统需要将道路直连匝道区域划为地理围栏外,可提前提醒驾驶员接管。同理,地理围栏11 是当前车道直连匝道区域,高精度地图定位需要将此区域划为地理围栏外。
( 4) 地理围栏4: 隧道区域
隧道场景更复杂,比如进出隧道光线变化会对感知有一定影响,而且在隧道中一旦出现故障风险更大,因此一些整车厂将隧道划为地理围栏外。自动驾驶系统需要保证在进入隧道前完成驾驶员接管或者安全停车,高精度地图定位系统需要将隧道区域划为地理围栏外,可提前提醒驾驶员接管。
( 5) 地理围栏5: 收费站区域
收费站前的车道线一般不规则,其他车辆换道更激进,因此一些整车厂将收费站区域划为地理围栏外。自动驾驶系统需要保证在进入收费站区域前完成驾驶员接管或者安全停车,高精度地图定位系统需要将收费站区域划为地理围栏外,可提前提醒驾驶员接管。
( 6) 地理围栏6: 道路施工区域
道路施工场景复杂,车道线不规则,自动驾驶系统需要保证在进入道路施工区域前完成驾驶员接管或者安全停车,高精度地图定位系统需要将道路施工区域划为地理围栏外,可提前提醒驾驶员接管。同理,地理围栏12 是当前车道前方为施工区域,当前车道在施工无法通行,高精度地图定位系统需要将车道施工区域划为地理围栏外。
( 7) 地理围栏7: 道路车道线缺失区域
道路车道线缺失时,车辆行驶不规则,自动驾驶系统需要保证在进入道路车道线缺失区域前完成驾驶员接管或者安全停车,高精度地图定位系统需要将道路车道线缺失区域划为地理围栏外,可提前提醒驾驶员接管。同理,地理围栏13 是车道级车道线缺失区域,当前车道存在车道线缺失问题高精度地图定位系统需要将车道级车道线缺失区域划为地理围栏外。
( 8) 地理围栏8: 道路护栏缺失区域
当左侧道路护栏存在缺失时,行人或动物进入高速公路的概率更大,右侧道路护栏缺失时风险更大,因为与对向车道无硬隔离。自动驾驶系统需要保证在进入道路护栏缺失区域前完成驾驶员接管或者安全停车,高精度地图定位系统需要将道路护栏缺失区域划为地理围栏外,可提前提醒驾驶员接管。
( 9) 地理围栏9: 紧急车道区域
正常情况下,车辆是不允许在紧急车道上行驶的,自动驾驶系统需要遵守交通法规。自动驾驶系统需要保证在紧急车道内不允许被开启,高精度地图定位系统需要将紧急车道区域划为地理围栏外。
( 10) 地理围栏10: 车道消失区域
当车道存在合并时,如图4 所示,三车道合并为二车道,最右侧车道消失。自动驾驶系统需要在车道消失前提醒驾驶员换道或自动完成换道。高精度地图定位系统需要将车道消失区域划为地理围栏外,可提前提醒驾驶员。
( 11) 地理围栏14: 车道过宽区域
自动驾驶系统需要保证在进入车道过宽区域前完成驾驶员接管或者安全停车,高精度地图定位系统需要将车道过宽区域划为地理围栏外,可提前提醒驾驶员接管。同理,高精度地图定位系统需要将车道过窄区域( 地理围栏15) 划为地理围栏外。
( 12) 地理围栏16: 车道曲率过大区域
车道曲率过大时,自动驾驶横向控制存在偏离车道等风险,自动驾驶系统需要保证在进入车道曲率过大区域前完成驾驶员接管或者安全停车,高精度地图定位系统需要将车道曲率过大区域划为地理围栏外,可提前提醒驾驶员接管。
( 13) 地理围栏17: 车道坡度过大区域
车道坡度过大时,感知和纵向控制可能存在风险,自动驾驶系统需要保证在进入车道坡度过大区域前完成驾驶员接管或者安全停车,高精度地图定位系统需要将车道坡度过大区域划为地理围栏外,可提前提醒驾驶员接管。
2. 2. 2 前方道路全车道高精度地图信息
高精度地图和定位系统将按照需求将地图数据发送给自动驾驶系统,如图5 所示,前方地图数据的距离和分岔路的数量可根据需求进行定义,比如发送距离为前方1. 5 km,分岔路的数据为2( 基于当前位置,距离本车最近的2 个道路) ,高精度地图定位系统会发送PATH1、PATH2 和PATH33 个道路的数据。自动驾驶系统可基于高精度地图定位提供的前方道路数据,提前获知前方道路、车道和道路设施信息,在减少错误感知、提前进行行为决策等方面有重要作用。
系统还可视为一个不受外界影响的传感器,在一些车载感知性能下降或失效的情况下依旧可在一定时间内提供前方车道线等信息,可起到感知冗余的作用。典型场景包括: ( 1) 自动驾驶车辆遇到雨、雪、雾等恶劣天气时,车载传感器( 摄像头探测性能较差,激光雷达探测性能也会有一定影响)探测性能会受影响; ( 2) 前视摄像头等前视传感器失明或故障时; ( 3) 前视摄像头等前视传感器因其他车辆遮挡影响车道线等信息的探测。
2. 3 高精度地图和定位系统测试
高精度定位测试内容包括道路级定位、车道级定位、车道内定位横向误差和纵向误差,纵向定位的真值通过高精度绝对位置测量设备进行测试,比如Novatel SPAN CPT 和迈普时空的POS320,基于真值和高精度定位结果计算纵向误差,其他指标通过基于真值摄像头的人工标注结果进行评测。高精度地图测试通过对所发送信号存储对比真值信息进行测试。
3 结语
高精度地图和定位系统在L3 级高速公路自动驾驶系统中具有重要的作用,而且是自动驾驶系统必需的一部分。
( 1) 高精度地图定位在实现自动驾驶系统地理围栏判定中具有不可替代的作用,普通导航地图和ADAS 地图均无法满足要求;
( 2) 高精度地图定位在恶劣天气、传感器失效、车道线被其他车辆遮挡等场景下可起到感知冗余
的作用,保证自动驾驶系统的安全。
相关文章:
高精度地图定位在高速公路自动驾驶系统中的应用
近年来随着汽车保有量不断增加,随之而来的是: ( 1) 严重的交通拥堵,通行效率低下,用在通行上的时间不断增加; ( 2) 交通事故频发,交通事故导致的伤亡人数和费用不断增加,而且绝大多数事故是由人为因素导致的; ( 3) 大气…...

【Apollo学习笔记】——规划模块TASK之SPEED_HEURISTIC_OPTIMIZER
文章目录 前言SPEED_BOUNDS_PRIORI_DECIDER功能简介SPEED_BOUNDS_PRIORI_DECIDER相关配置SPEED_BOUNDS_PRIORI_DECIDER流程1. 对路程和时间进行采样以及速度限制2. 设计状态转移方程(cost计算)2.0 CalculateCostAt代价计算2.1 GetObstacleCost障碍物cost…...

R语言APRIORI关联规则、K-MEANS均值聚类分析中药专利复方治疗用药规律网络可视化...
全文链接:http://tecdat.cn/?p30605 应用关联规则、聚类方法等数据挖掘技术分析治疗的中药专利复方组方配伍规律(点击文末“阅读原文”获取完整代码数据)。 方法检索治疗中药专利复方,排除外用中药及中西药物合用的复方。最近我们…...

3. MySql 5.7安装方式
服务器ip数据库版本硬件要求10.1.1.31mysql-boost-5.7.31.tar.gz2G/40G,内存不够需要开swap空间10.1.1.32mysql-boost-5.7.31.tar.gz2G/40G关闭swap swapoff -a && sed -i ‘/ swap / s/^(.*)$/#\1/g’ /etc/fstab 安装依赖 yum -y install make cmake gcc gcc-c++ bis…...
Flink 如何定位反压节点?
分析&回答 Flink Web UI 自带的反压监控 —— 直接方式 Flink Web UI 的反压监控提供了 Subtask 级别的反压监控。监控的原理是通过Thread.getStackTrace() 采集在 TaskManager 上正在运行的所有线程,收集在缓冲区请求中阻塞的线程数(意味着下游阻…...

LeetCode-1005-K次取反后最大化的数组和-贪心算法
题目描述: 给你一个整数数组 nums 和一个整数 k ,按以下方法修改该数组: 选择某个下标 i 并将 nums[i] 替换为 -nums[i] 。 重复这个过程恰好 k 次。可以多次选择同一个下标 i 。 以这种方式修改数组后,返回数组 可能的最大和 。 …...
Linux内核源码分析 (5)多处理器调度
Linux内核源码分析 (5)多处理器调度 文章目录 Linux内核源码分析 (5)多处理器调度注:本章节使用的内核版本为Linux 5.6.18一、 SMT和NUMA1、SMP (对称多处理器结构)2、NUMA (非一致内存访问结构) 二、多核调度三、调度域和调度组四、SMP调度详…...
华为云云服务器评测|华为云云耀云服务器L实例使用教学
文章目录 教学小故事 教学 华为云云耀云服务器L实例是一款提供高效、可靠、安全的基础设施服务的云服务器。下面是使用教学: 登录华为云官网。 测评产品链接:https://www.huaweicloud.com/product/hecs-light.html 进入云耀云服务器管理控制台…...

这个在线网站让你三分钟制作出一份精美简历
今天,我要向大家推荐一个神奇的在线工具网站,它能够提供免费简历模板、简历范文,支持在线编辑,并且一键下载为PDF。这个工具让你的简历制作变得轻松便捷! 首先,这个网站的简历模板非常丰富多样。无论你是刚…...

Sql 函数传递参数 字符串拼接
使用场景 一个计算价格的函数,多个存储过程调用,因业务需求经常要新增参数,避免修改函数时程序执行存储过程报错,将多个参数拼接为一个字符串传递 -- 调用函数CalcuPrice(UnitPrice,CONCAT(MFQZC,MFQZC,&ItemNum,ItemNum,&am…...

java八股文面试[多线程]——两个线程交替打印1-100之间的数字
一份代码,两个线程,使用synchronize实现: 重写run()方法,将输出1到100之间整数的代码写到同步方法里。线程1进入到同步方法,输出一个整数后,阻塞并释放锁。线程2进入到同步方法,唤醒线程1&…...

gRPC之gRPC认证
1、gRPC认证 前面篇章的gRPC都是明文传输的,容易被篡改数据,本章将介绍如何为gRPC添加安全机制。 gRPC默认内置了两种认证方式: SSL/TLS认证方式 基于Token的认证方式 同时,gRPC提供了接口用于扩展自定义认证方式。 1.1 TLS…...

简易虚拟培训系统-UI控件的应用3
目录 Button组件的组成 Button组件方法1-在Button组件中设置OnClick()回调 Button组件方法2-在脚本中添加Button类的监听 上一篇使用了文件流读取硬盘数据并显示在Text组件中,本篇增加使用按钮来控制显示哪一篇文字信息。 Button组件的组成 1. 新建Button&#…...
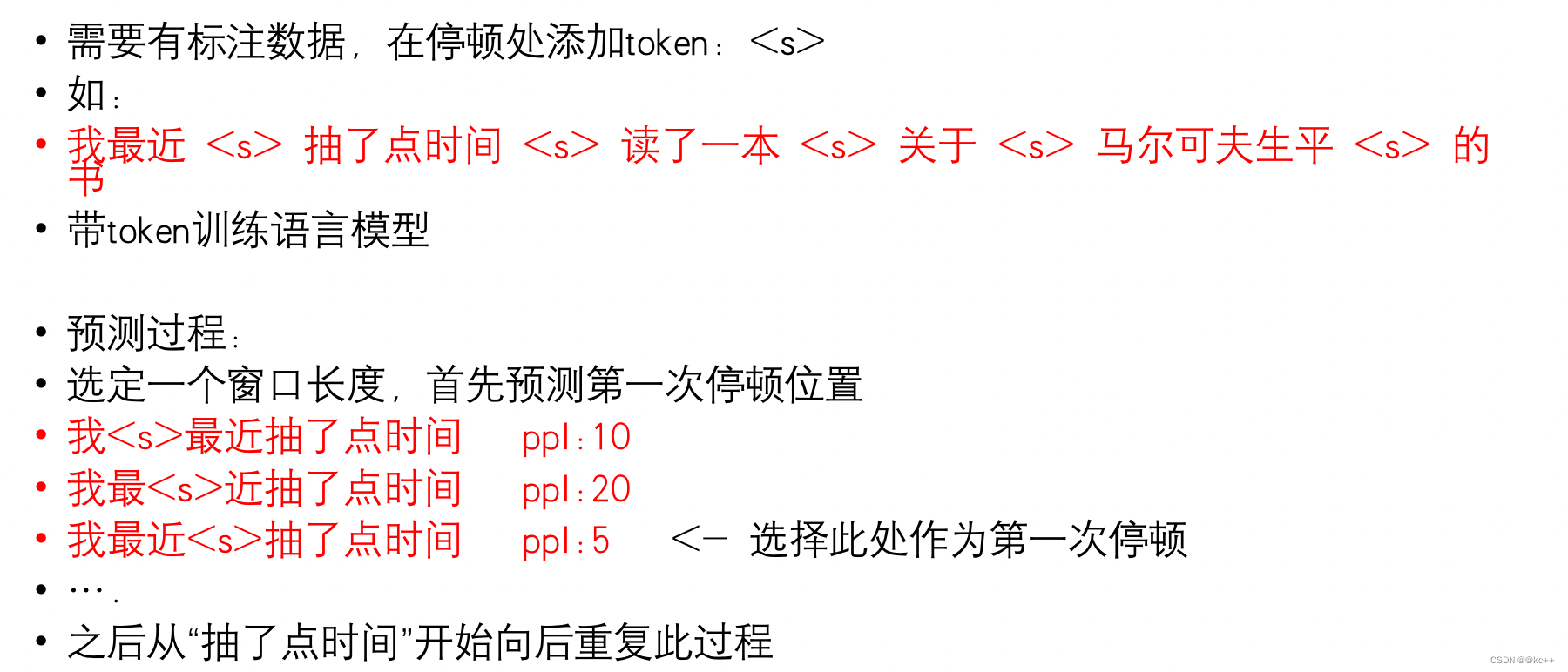
语言模型(language model)
文章目录 引言1. 什么是语言模型2. 语言模型的主要用途2.1 言模型-语音识别2.2 语言模型-手写识别2.3 语言模型-输入法 3. 语言模型的分类4. N-gram语言模型4.1 N-gram语言模型-平滑方法4.2 ngram代码4.3 语言模型的评价指标4.4 两类语言模型的对比 5. 神经网络语言模型6. 语言…...

【3.Vue子组件调用父组件方法】
1.概述 使用组件建抛出事件的方式来调用父组件的方法,不直接用this.$parent.function的方法,当然这种方式是可以的。 2.代码实现 2.1 父组件代码 父组件写一个方法给子组件调用 // 设备点击事件// equipId:设备id// leftValue:left值// topValue:top…...

算法系列-876-求链表的中间节点
求链表中间节点,如果有两个中间节点取后面那个 链表定义 // lc codestart /*** Definition for singly-linked list.* public class ListNode {* int val;* ListNode next;* ListNode() {}* ListNode(int val) { this.val val; }* ListNode(…...
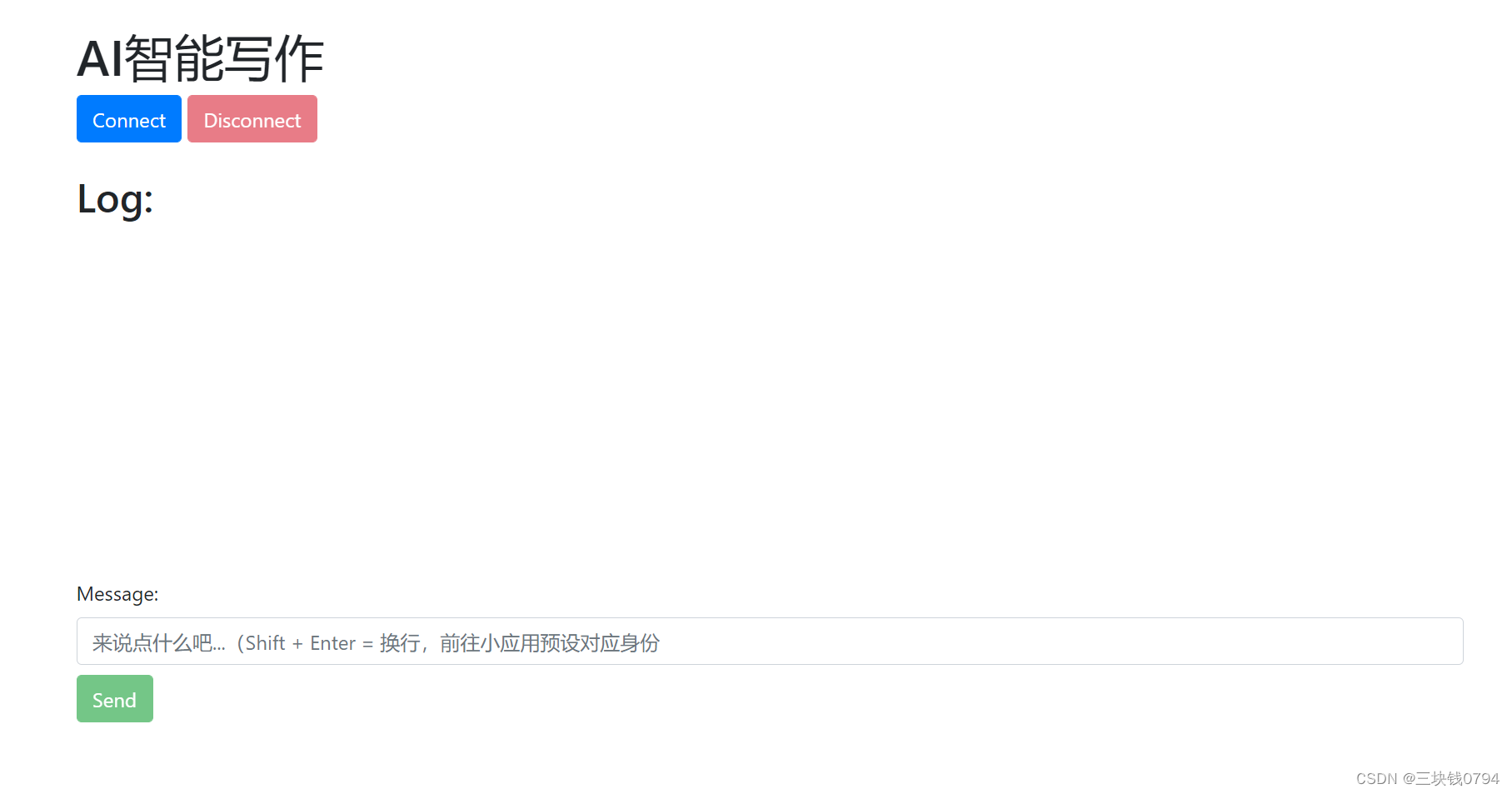
h5 ws 客户端 监听ws服务器广播的信息
<!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><title>AI智能写作</title><!-- Bootstrap CSS --><meta charset"utf-8"><meta name"viewport" content"widt…...
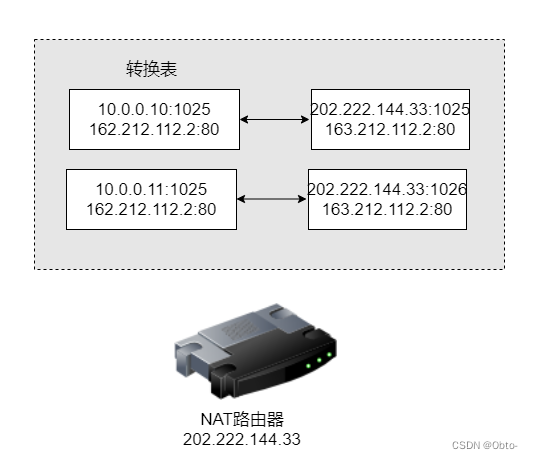
网络基础之重中之重
目录 IP协议 编辑 基本概念: 协议头格式: 编辑 网段划分 DHCP : CIDR: 特殊的IP地址: IP地址的数量限制: 私有IP和公网IP 路由 路由的过程: 数据链路层 认识以太网&#x…...

HarmonyOS应用开发者-----基础认证试题及答案
HarmonyOS应用开发者基础认证试题及答案 试题会不定时刷新,本试题仅供大家学习参考 【判断题】 2.5/2.5 所有使用@Component修饰的自定义组件都支持onPageShow,onBackPress和onPageHide生命周期函数。 正确(True)错误(False) 回答正确【判断题】 2.5/2.5 在Column和Row容器组…...

C++:string并非以0作为结束符,c_str和data的返回却包含结束符0
C语言中使用char数组保存字符串时,是以字符为0或者\0作为字符串的结束符标志的。 所以一个char str[10]的数组只能合法的保存9个字符(因为最后还要加一个结束符)。 #include <cstring> #include <iostream>using namespace std;int main() {char str[10] ="…...
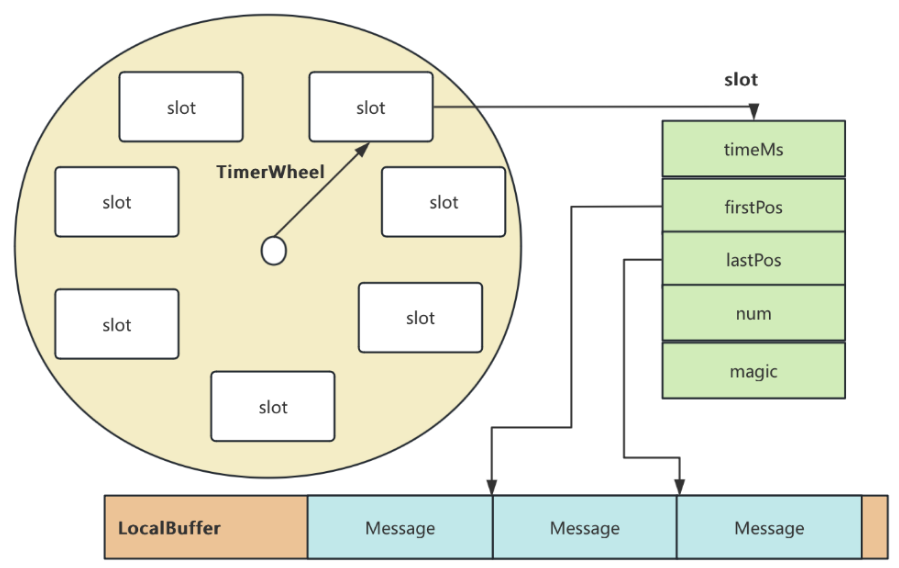
RocketMQ延迟消息机制
两种延迟消息 RocketMQ中提供了两种延迟消息机制 指定固定的延迟级别 通过在Message中设定一个MessageDelayLevel参数,对应18个预设的延迟级别指定时间点的延迟级别 通过在Message中设定一个DeliverTimeMS指定一个Long类型表示的具体时间点。到了时间点后…...
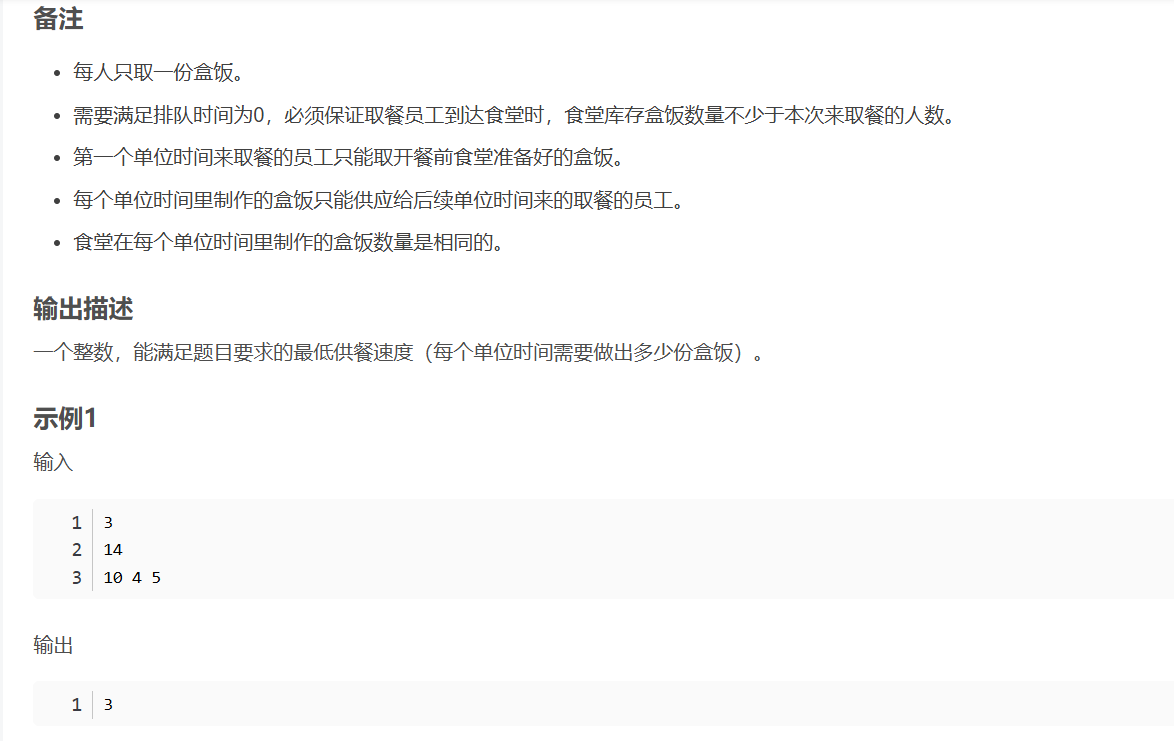
华为OD机试-食堂供餐-二分法
import java.util.Arrays; import java.util.Scanner;public class DemoTest3 {public static void main(String[] args) {Scanner in new Scanner(System.in);// 注意 hasNext 和 hasNextLine 的区别while (in.hasNextLine()) { // 注意 while 处理多个 caseint a in.nextIn…...

Android15默认授权浮窗权限
我们经常有那种需求,客户需要定制的apk集成在ROM中,并且默认授予其【显示在其他应用的上层】权限,也就是我们常说的浮窗权限,那么我们就可以通过以下方法在wms、ams等系统服务的systemReady()方法中调用即可实现预置应用默认授权浮…...
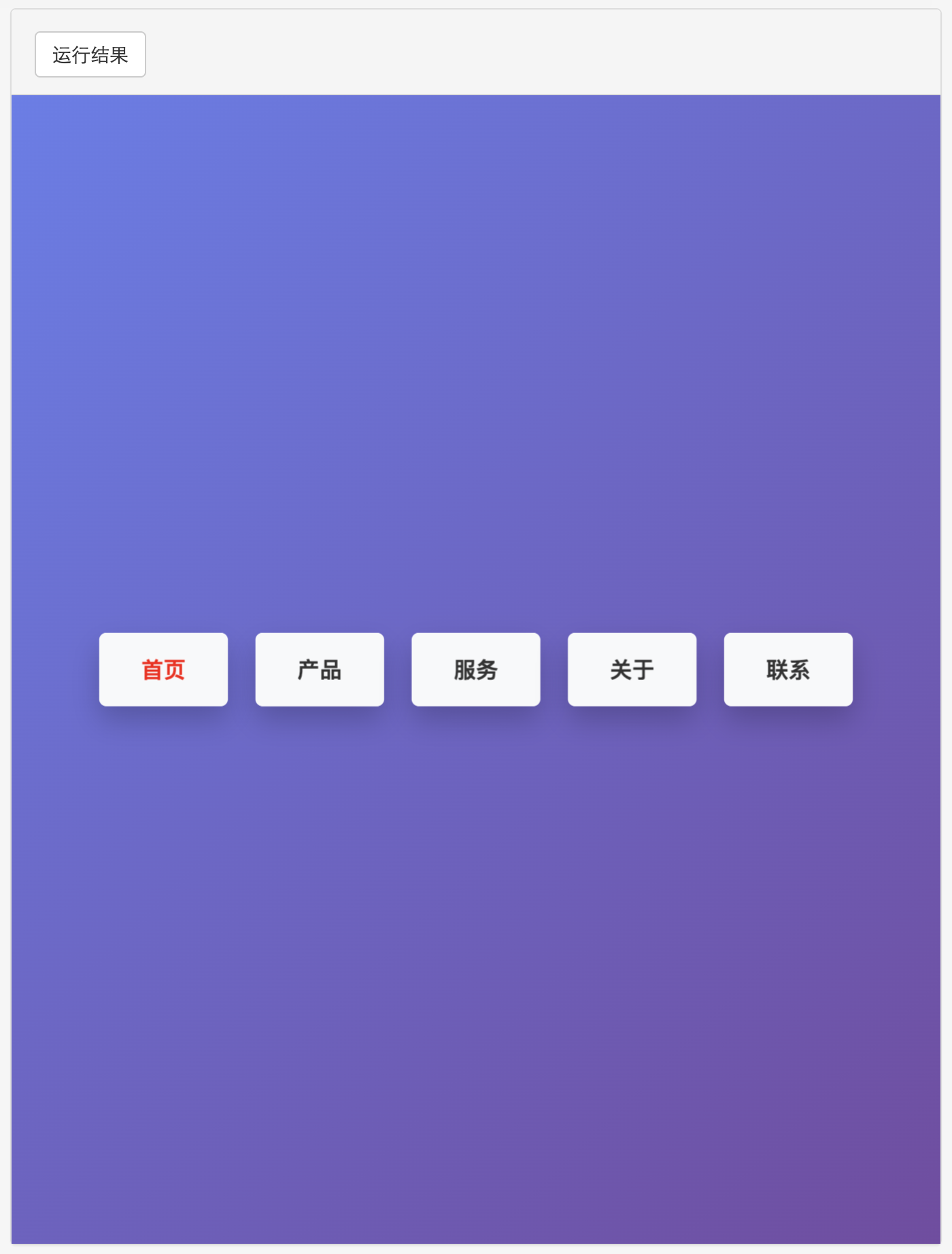
多种风格导航菜单 HTML 实现(附源码)
下面我将为您展示 6 种不同风格的导航菜单实现,每种都包含完整 HTML、CSS 和 JavaScript 代码。 1. 简约水平导航栏 <!DOCTYPE html> <html lang"zh-CN"> <head><meta charset"UTF-8"><meta name"viewport&qu…...
【C++特殊工具与技术】优化内存分配(一):C++中的内存分配
目录 一、C 内存的基本概念 1.1 内存的物理与逻辑结构 1.2 C 程序的内存区域划分 二、栈内存分配 2.1 栈内存的特点 2.2 栈内存分配示例 三、堆内存分配 3.1 new和delete操作符 4.2 内存泄漏与悬空指针问题 4.3 new和delete的重载 四、智能指针…...
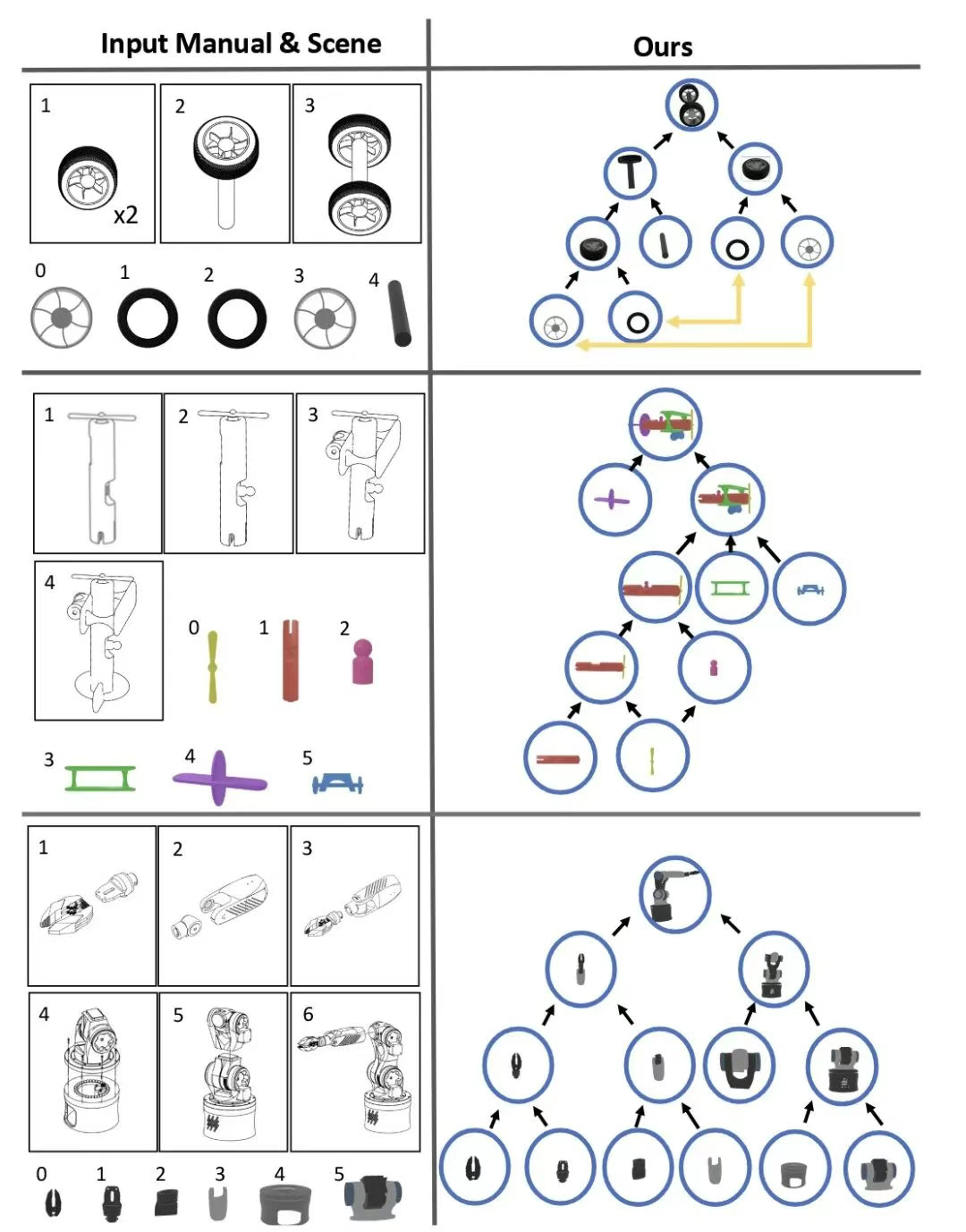
RSS 2025|从说明书学习复杂机器人操作任务:NUS邵林团队提出全新机器人装配技能学习框架Manual2Skill
视觉语言模型(Vision-Language Models, VLMs),为真实环境中的机器人操作任务提供了极具潜力的解决方案。 尽管 VLMs 取得了显著进展,机器人仍难以胜任复杂的长时程任务(如家具装配),主要受限于人…...
Windows安装Miniconda
一、下载 https://www.anaconda.com/download/success 二、安装 三、配置镜像源 Anaconda/Miniconda pip 配置清华镜像源_anaconda配置清华源-CSDN博客 四、常用操作命令 Anaconda/Miniconda 基本操作命令_miniconda创建环境命令-CSDN博客...

深入浅出Diffusion模型:从原理到实践的全方位教程
I. 引言:生成式AI的黎明 – Diffusion模型是什么? 近年来,生成式人工智能(Generative AI)领域取得了爆炸性的进展,模型能够根据简单的文本提示创作出逼真的图像、连贯的文本,乃至更多令人惊叹的…...
【C++】纯虚函数类外可以写实现吗?
1. 答案 先说答案,可以。 2.代码测试 .h头文件 #include <iostream> #include <string>// 抽象基类 class AbstractBase { public:AbstractBase() default;virtual ~AbstractBase() default; // 默认析构函数public:virtual int PureVirtualFunct…...

绕过 Xcode?使用 Appuploader和主流工具实现 iOS 上架自动化
iOS 应用的发布流程一直是开发链路中最“苹果味”的环节:强依赖 Xcode、必须使用 macOS、各种证书和描述文件配置……对很多跨平台开发者来说,这一套流程并不友好。 特别是当你的项目主要在 Windows 或 Linux 下开发(例如 Flutter、React Na…...