LA@二次型@标准化相关原理和方法
文章目录
- 标准化方法
- 正交变换法🎈
- 求矩阵的特征值
- 求各特征值对应的线性无关特征向量组
- 正交化各个向量组
- 配方法
- 步骤
- 例
- 例
- 初等变换法
- 原理
- 总结初等变换法的步骤
- 例
标准化方法
正交变换法🎈
-
二次型可标准化定理的证明过程给出使用二次型标准化的步骤
-
该方法通过计算出一个特定的正交矩阵 P \bold P P,并用 P \bold P P来进行线性变换实现得到标准形
求矩阵的特征值
-
求出 n n n元二次型矩阵 A \bold A A的全部特征值 λ i \lambda_i λi,它们分别是 n i n_i ni重根(而且对应 n i n_i ni个线性无关的特征向量)
- ∑ i s n i = n \sum_{i}^{s}n_i=n ∑isni=n, i = 1 , 2 , ⋯ , s i=1,2,\cdots,s i=1,2,⋯,s(表示A有s个互异的特征根)
求各特征值对应的线性无关特征向量组
-
对每个 λ i \lambda_i λi求出对应的齐次线性方程组 ( λ i E − A ) x = 0 \bold{(\lambda_i{E}-A)x=0} (λiE−A)x=0的基础解系 Φ i \Phi_i Φi(包含 n i n_i ni个线性无关向量)
- Φ i : α 1 ( i ) , ⋯ , α n i ( i ) \Phi_{i}:\alpha_1^{(i)},\cdots,\alpha_{n_i}^{(i)} Φi:α1(i),⋯,αni(i), i i i表示向量(组)属于特征值 λ i \lambda_i λi,包含 n i n_i ni个线性无关的向量
正交化各个向量组
-
分别对 Φ 1 , ⋯ , Φ s \Phi_1,\cdots,\Phi_{s} Φ1,⋯,Φs正交化得到向量组 Ψ = ϕ 1 , ⋯ , ϕ s \Psi=\phi_1,\cdots,\phi_{s} Ψ=ϕ1,⋯,ϕs( ϕ i 是 Φ i \phi_i是\Phi_i ϕi是Φi正交化后的向量组)
-
令矩阵 P = ( Ψ ) \bold P=(\Psi) P=(Ψ),则 P \bold P P能使 P T A P = Λ \bold{P^{T}AP=\Lambda} PTAP=Λ= diag ( λ i , ⋯ , λ n ) \text{diag}(\lambda_i,\cdots,\lambda_n) diag(λi,⋯,λn)
-
则正交线性变换 x = P y \bold{x=Py} x=Py就是所求的线性变换
-
y = ( y 1 , ⋯ , y n ) T \bold y=(y_1,\cdots,y_n)^{T} y=(y1,⋯,yn)T
-
f ( x 1 , ⋯ , x n ) → x = Q y g ( y 1 , ⋯ , y n ) = ∑ i = 1 n λ i y i 2 f(x_1,\cdots,x_n)\xrightarrow{x=Qy}g(y_1,\cdots,y_n)=\sum\limits_{i=1}^{n}\lambda_iy_i^2 f(x1,⋯,xn)x=Qyg(y1,⋯,yn)=i=1∑nλiyi2
-
配方法
- 用正交变换化二次型成标准形,具有保持几何形状不变的优点
- 如果不局限于用正交变换,还可以有多种方法确定一个一般的可逆矩阵来标准化二次型
- 例如拉格朗日配方法,其原理和依据参见二次型可标准化定理的配方角度证明过程
步骤
- 若 f ( x 1 , ⋯ , x 2 ) = ∑ i = 2 n ∑ j = 2 n a i j x i x j f(x_1,\cdots,x_2)=\sum_{i=2}^{n}\sum_{j=2}^{n}a_{ij}x_ix_j f(x1,⋯,x2)=∑i=2n∑j=2naijxixj, a j i = a i j a_{ji}=a_{ij} aji=aij包含 x i x_i xi的平方项(设为 a i i x i 2 a_{ii}x_i^2 aiixi2),那么将 x i x_i xi相关的项集中求和,记为 u i = ∑ j ≠ i n 2 a i j x i x j u_i=\sum_{j\neq{i}}^{n}2a_{ij}x_{i}x_{j} ui=∑j=in2aijxixj;对 η i = a i i x i 2 + u i \eta_i=a_{ii}x_i^2+u_i ηi=aiixi2+ui进行配方,得到形如 η i = b i ( x i + ⋯ ) 2 + ⋯ \eta_{i}=b_{i}(x_{i}+\cdots)^{2}+\cdots ηi=bi(xi+⋯)2+⋯,从而 f = η i + v i f=\eta_i+v_i f=ηi+vi= b i ( x i i + ⋯ ) 2 + ⋯ + v i b_{i}(x_{ii}+\cdots)^{2}+\cdots+v_i bi(xii+⋯)2+⋯+vi
(1),- 其中 v i = f − η i = ∑ r , j ≠ i a r j x r x j v_i=f-\eta_i=\sum_{r,j\neq{i}}a_{rj}x_rx_j vi=f−ηi=∑r,j=iarjxrxj
- 易知,
(1)式中只有第一项 b i ( x i + ⋯ ) 2 b_{i}(x_{i}+\cdots)^{2} bi(xi+⋯)2包含 x i i x_{ii} xii,其余项不包含 x i i x_{ii} xii - 不断地对
(1)中的下一个平方项进行配方(理论分析中已经指出,(1)包含了所有 x i x_i xi的平方项 i = 1 , ⋯ , n i=1,\cdots,n i=1,⋯,n,最终所有 x i , i = 1 , ⋯ , n x_i,i=1,\cdots,n xi,i=1,⋯,n都会被配方成形如 b i ( x i i + ⋯ ) 2 b_{i}(x_{ii}+\cdots)^2 bi(xii+⋯)2的形式 - 构造线性变换: y i = x i + ⋯ y_i=x_{i}+\cdots yi=xi+⋯,
(2)( i = 1 , ⋯ , n ) (i=1,\cdots,n) (i=1,⋯,n);求解该线性方程组,得到线性变换 x i = y i − ⋯ x_i=y_i-\cdots xi=yi−⋯(3) - 那么线性变换
(3)就能够使 f f f标准化
- 若 f f f中不包含任意平方项,但是包含某个 a i j ≠ 0 a_{ij}\neq{0} aij=0, i ≠ j i\neq{j} i=j则运用线性变换
- x i = y i − y j x_i=y_{i}-y_{j} xi=yi−yj
- x j = y i + y j x_j=y_i+y_j xj=yi+yj
- x k = y k x_k=y_k xk=yk, k = 1 , ⋯ , n k=1,\cdots,n k=1,⋯,n且 k ≠ i , j k\neq{i,j} k=i,j
- 代入该线性变换到 f f f可以将此类情况转换为第一种情况(包含平方项)求解
例
-
f ( x 1 , x 2 , x 3 ) = 4 ( x 1 2 + x 2 2 + x 3 + x 1 x 2 + x 1 x 3 + x 2 x 3 ) f(x_1,x_2,x_3)=4(x_1^2+x_2^2+x^3+x_1x_2+x_1x_3+x_2x_3) f(x1,x2,x3)=4(x12+x22+x3+x1x2+x1x3+x2x3)
-
配方得到
(0)
f ( x 1 , x 2 , x 3 ) = 4 ( x 1 2 + x 1 ( x 2 + x 3 ) + x 2 2 + x 3 2 + x 2 x 3 ) = 4 [ ( x 1 + 1 2 x 1 ( x 2 + x 3 ) ) 2 − 1 4 ( x 2 + x 3 ) 2 + x 2 2 + x 3 2 + x 2 x 3 ] = 4 ( x 1 + 1 2 ( x 2 + x 3 ) ) 2 − ( x 2 2 + 2 x 2 x 3 + x 3 2 ) + 4 ( x 2 2 + x 3 2 + x 2 x 3 ) = 4 ( x 1 + 1 2 ( x 2 + x 3 ) ) 2 + 3 x 2 2 + 3 x 3 2 + 2 x 2 x 3 = 4 ( x 1 + 1 2 ( x 2 + x 3 ) ) 2 + 3 ( x 2 2 + 2 3 x 2 x 3 ) + 3 x 3 2 = 4 ( x 1 + 1 2 ( x 2 + x 3 ) ) 2 + 3 [ ( x 2 + 1 3 x 3 ) 2 − 1 9 x 3 2 ] + 3 x 3 2 = 4 ( x 1 + 1 2 ( x 2 + x 3 ) ) 2 + 3 ( x 2 + 1 3 x 3 ) 2 − 1 3 x 3 2 + 3 x 3 2 = 4 ( x 1 + 1 2 ( x 2 + x 3 ) ) 2 + 3 ( x 2 + 1 3 x 3 ) 2 + 8 3 x 3 2 \begin{aligned} f(x_1,x_2,x_3) &=4(x_1^2+x_1(x_2+x_3)+x_2^2+x_3^2+x_2x_3) \\&=4[(x_1+\frac{1}{2}x_1(x_2+x_3))^2-\frac{1}{4}(x_2+x_3)^2+x_2^2+x_3^2+x_2x_3] \\&=4(x_1+\frac{1}{2}(x_2+x_3))^2-(x_2^2+2x_2x_3+x_3^2)+4(x_2^2+x_3^2+x_2x_3) \\&=4(x_1+\frac{1}{2}(x_2+x_3))^2+3x_2^2+3x_3^2+2x_2x_3 \\&=4(x_1+\frac{1}{2}(x_2+x_3))^2+3(x_2^2+\frac{2}{3}x_2x_3)+3x_3^2 \\&=4(x_1+\frac{1}{2}(x_2+x_3))^2+3[(x_2+\frac{1}{3}x_3)^2-\frac{1}{9}x_3^2]+3x_3^2 \\&=4(x_1+\frac{1}{2}(x_2+x_3))^2+3(x_2+\frac{1}{3}x_3)^2-\frac{1}{3}x_3^2+3x_3^2 \\&=4(x_1+\frac{1}{2}(x_2+x_3))^2+3(x_2+\frac{1}{3}x_3)^2+\frac{8}{3}x_3^2 \end{aligned} f(x1,x2,x3)=4(x12+x1(x2+x3)+x22+x32+x2x3)=4[(x1+21x1(x2+x3))2−41(x2+x3)2+x22+x32+x2x3]=4(x1+21(x2+x3))2−(x22+2x2x3+x32)+4(x22+x32+x2x3)=4(x1+21(x2+x3))2+3x22+3x32+2x2x3=4(x1+21(x2+x3))2+3(x22+32x2x3)+3x32=4(x1+21(x2+x3))2+3[(x2+31x3)2−91x32]+3x32=4(x1+21(x2+x3))2+3(x2+31x3)2−31x32+3x32=4(x1+21(x2+x3))2+3(x2+31x3)2+38x32 -
令 { y 1 = x 1 + 1 2 ( x 2 + x 3 ) y 2 = x 2 + 1 3 x 3 y 3 = x 3 \begin{cases}y_1=&x_1+\frac{1}{2}(x_2+x_3)\\y_2=&x_2+\frac{1}{3}x_3\\y_3=&x_3\end{cases} ⎩ ⎨ ⎧y1=y2=y3=x1+21(x2+x3)x2+31x3x3
(1);则 f ( x 1 , x 2 , x 3 ) = g ( y 1 , y 2 , y 3 ) = 4 y 1 2 + 3 y 2 2 + 8 3 y 3 2 f(x_1,x_2,x_3)=g(y_1,y_2,y_3)=4y_1^2+3y_2^2+\frac{8}{3}y_3^2 f(x1,x2,x3)=g(y1,y2,y3)=4y12+3y22+38y32,这是一个标准形二次型 -
通过解线性方程组
(1),得 y → x \bold{y\to{x}} y→x所用的线性变换 x = Q y \bold{x=Qy} x=Qy-
x 1 = y 1 − 1 2 y 2 − 1 3 y 3 x_1=y_1-\frac{1}{2}y_2-\frac{1}{3}y_3 x1=y1−21y2−31y3
-
x 2 = y 2 − 1 3 y 3 x_2=y_2-\frac{1}{3}y_3 x2=y2−31y3
-
x 3 = y 3 x_3=y_3 x3=y3
-
变换矩阵: Q = ( 1 − 1 2 − 1 3 0 1 − 1 3 0 0 1 ) \bold Q=\begin{pmatrix}1&-\frac{1}{2}&-\frac{1}{3}\\0&1&-\frac{1}{3}\\0&0&1\end{pmatrix} Q= 100−2110−31−311
-
求变换矩阵也可利用可逆线性变换的逆变换公式:若 y = C x \bold{y=Cx} y=Cx则 x = C − 1 y \bold{x=C^{-1}y} x=C−1y,也是计算 C = ( 1 1 2 1 2 0 1 1 3 0 0 1 ) \bold C=\begin{pmatrix}1&\frac{1}{2}&\frac{1}{2}\\0&1&\frac{1}{3}\\0&0&1\end{pmatrix} C= 100211021311 的逆矩阵 C \bold{C} C,则 Q = C − 1 \bold{Q=C^{-1}} Q=C−1
-
将此线性变换代入 f f f或者 g g g中就可得到 f f f的标准形: f = 4 y 1 2 + 3 y 2 2 + 8 3 y 3 2 f=4y_1^2+3y_2^2+\frac{8}{3}y_3^2 f=4y12+3y22+38y32,这个表达式可以从已经配好方的式
(2)中直接读出(将平方项依次用 y 1 , ⋯ , y n y_1,\cdots,y_n y1,⋯,yn代替)
-
例
-
f ( x 1 , x 2 , x 3 ) = x 1 x 2 + x 1 x 3 + 2 x 2 x 3 f(x_1,x_2,x_3)=x_1x_2+x_1x_3+2x_2x_3 f(x1,x2,x3)=x1x2+x1x3+2x2x3标准化
-
对于 x 1 x 2 x_1x_2 x1x2
-
T : { x 1 = y 1 − y 2 x 2 = y 1 + y 2 x 3 = y 3 T = ( 1 1 0 1 − 1 0 0 0 1 ) T:\begin{cases} x_1=y_1-y_2\\ x_2=y_1+y_2\\ x_3=y_3 \end{cases} \\ T=\begin{pmatrix} 1&1&0\\ 1&-1&0\\ 0&0&1 \end{pmatrix} T:⎩ ⎨ ⎧x1=y1−y2x2=y1+y2x3=y3T= 1101−10001
-
把线性变换 x = T y \bold{x=Ty} x=Ty带入 f f f;
- f = ( y 1 − y 2 ) ( y 1 + y 2 ) + ( y 1 − y 2 ) y 3 + 2 ( y 1 + y 2 ) ( y 3 ) = y 1 2 − y 2 2 + y 1 y 3 − y 2 y 3 + 2 y 1 y 3 + 2 y 2 y 3 = y 1 2 − y 2 2 + 3 y 1 y 3 + y 2 y 3 f=(y_1-y_2)(y_1+y_2)+(y_1-y_2)y_3+2(y_1+y_2)(y_3) \\=y_1^2-y_2^2+y_1y_3-y_2y_3+2y_1y_3+2y_2y_3 \\=y_1^2-y_2^2+3y_1y_3+y_2y_3 f=(y1−y2)(y1+y2)+(y1−y2)y3+2(y1+y2)(y3)=y12−y22+y1y3−y2y3+2y1y3+2y2y3=y12−y22+3y1y3+y2y3
-
问题转换为第一种类型,配方得:式
(1)- g ( y 1 , y 2 , y 3 ) = ( y 1 + 3 2 y 3 ) 2 − ( y 2 + 1 2 y 3 ) 2 − 2 y 3 2 g(y_1,y_2,y_3)=(y_1+\frac{3}{2}y_3)^2-(y_2+\frac{1}{2}y_3)^2-2y_3^2 g(y1,y2,y3)=(y1+23y3)2−(y2+21y3)2−2y32
-
令
{ z 1 = y 1 + 3 2 y 3 z 2 = y 1 + 1 2 y 3 z 3 = y 3 f = z 1 2 − z 2 2 − 2 z 3 2 \\ \begin{cases} z_1=y_1+\frac{3}{2}y_3\\ z_2=y_1+\frac{1}{2}y_3\\ z_3=y_3 \end{cases} \\ f=z_1^2-z_2^2-2z_3^2 ⎩ ⎨ ⎧z1=y1+23y3z2=y1+21y3z3=y3f=z12−z22−2z32 -
解上述线性方程组,得新线性变换 y = Q z \bold{y=Qz} y=Qz及其变换矩阵:
{ y 1 = z 1 − 3 2 z 3 y 2 = z 2 − 1 2 z 3 y 3 = z 3 Q = ( 1 0 − 3 2 0 1 − 1 2 0 0 1 ) \begin{cases} y_1=z_1-\frac{3}{2}z_3\\ y_2=z_2-\frac{1}{2}z_3\\ y_3=z_3 \end{cases} \quad Q=\begin{pmatrix} 1&0&-\frac{3}{2}\\ 0&1&-\frac{1}{2}\\ 0&0&1 \end{pmatrix} ⎩ ⎨ ⎧y1=z1−23z3y2=z2−21z3y3=z3Q= 100010−23−211 -
根据线性变换乘法和矩阵乘法的关系 ( x = T y = T ( Q z ) = ( T Q ) z ) (\bold{x=Ty=T(Qz)=(TQ)z}) (x=Ty=T(Qz)=(TQ)z),可求得能将 f f f标准化的线性变换 x = C z \bold{x=Cz} x=Cz的变换矩阵 C \bold{C} C为
C = T Q = ( 1 1 0 1 − 1 0 0 0 1 ) ( 1 0 − 3 2 0 1 − 1 2 0 0 1 ) = ( 1 1 − 2 1 − 1 − 1 0 0 1 ) C=TQ =\begin{pmatrix} 1&1&0\\ 1&-1&0\\ 0&0&1 \end{pmatrix} \begin{pmatrix} 1&0&-\frac{3}{2}\\ 0&1&-\frac{1}{2}\\ 0&0&1 \end{pmatrix} =\begin{pmatrix} 1&1&-{2}\\ 1&-1&-1\\ 0&0&1 \end{pmatrix} C=TQ= 1101−10001 100010−23−211 = 1101−10−2−11 -
由式
(1),标准化后的二次型为 f = z 2 − z 2 2 − 2 z 3 2 f=z^2-z_2^2-2z_3^2 f=z2−z22−2z32
-
-
初等变换法
- 正交变换法和配方法需要考虑的东西较多,操作起来不是很方便,下面介绍一种利用初等变化法来求出能够标准化给定二次型的线性变换矩阵
- 这个方法的基本原理和利用初等变换操作求解方阵的逆矩阵相同,都是利用一个 n n n阶单位阵来记录一系列的初等变换,得到想要的矩阵
原理
-
任意实 n n n阶对称阵 A A A都合同于对角阵 Λ \Lambda Λ,即存在可逆矩阵 P \bold P P,使得 P T A P = Λ \bold{P^{T}AP=\Lambda} PTAP=Λ
-
而可逆矩阵 P \bold{P} P可以表示为若干初等矩阵的乘积; P \bold{P} P= P 1 ⋯ P s \bold{P}_1\cdots\bold{P}_s P1⋯Ps,从而有 ( P 1 ⋯ P s ) T A ( P 1 ⋯ P s ) = Λ \bold{(\bold{P}_1\cdots{P}_s)^{T}A(\bold{P}_1\cdots{P}_s)=\Lambda} (P1⋯Ps)TA(P1⋯Ps)=Λ,即 P s T ⋯ P 1 T A P 1 ⋯ P s = Λ \bold{\bold{P}_s^{T}\cdots{P}_{1}^{T}A\bold{P}_1\cdots{P}_s=\Lambda} PsT⋯P1TAP1⋯Ps=Λ
(1) -
初等矩阵的转置仍然是初等矩阵,并且矩阵 A \bold{A} A左乘 P i T \bold{P}_i^{T} PiT并右乘 P i \bold{P}_i Pi相当于对矩阵 A \bold{A} A作成对的同类型同顺序的行列初等变换(原理参考初等矩阵的性质)
-
因此,我们可以通过将 A \bold{A} A经过成对初等变换转换为一个对角阵 Λ \bold\Lambda Λ
- 这个过程对应于
(1),每一次初等行变换对应于 P T i \bold{P^{T}}_i PTi,绑定的列变换对应于 P i \bold{P}_i Pi - 容易发现 P \bold{P} P= P 1 ⋯ P s \bold{P}_1\cdots\bold{P}_s P1⋯Ps,因此再整个对角化过程中,只需要收集每一次的列变换
- 收集 P 1 ⋯ P s \bold{P}_1\cdots\bold{P}_s P1⋯Ps的方法是用一个 n n n阶单位阵同步对角化过程中的所有列变换
- 原理是: E P 1 ⋯ P s \bold{E}\bold{P}_1\cdots\bold{P}_s EP1⋯Ps= E P \bold{EP} EP= P \bold{P} P
- 我们对行变换不感兴趣,当然行变换也是可以的,求出的是 P T \bold{P}^T PT,需要再次转置才能得到 P \bold{P} P,因此我们直接选择收集列变换更加直接
- 这个过程对应于
-
这部分对初等变换法求解标准化二次型的线性可逆变换矩阵的可行性和正确性给出证明,并且给出了具体的操作方法
总结初等变换法的步骤
-
构造松散分块矩阵 ( A E ) \bold{\binom{A}{E}} (EA)并执行初等变换
-
之所以称为松散,因为我们在将 A A A变换为 Λ \Lambda Λ时,分块E只需要接收列变换 P 1 P 2 ⋯ P s \bold{P_1P_2\cdots{P_s}} P1P2⋯Ps,而不需要做行变换(即忽略行变换)
-
在实际的操作中,可以分为行变换阶段和列变换阶段
- 我们可以先将矩阵 A \bold{A} A用一系列的初等行变换化为上三角矩阵,这部分变换对应于 L = P s T ⋯ P 1 T A \bold{L=\bold{P}_s^{T}\cdots{P}_{1}^{T}}\bold{A} L=PsT⋯P1TA,即依次执行 P 1 T ⋯ P s T \bold{P}_1^{T}\cdots\bold{P}_s^{T} P1T⋯PsT
- L = ( P s T ( ⋯ ( P 1 T A ) ⋯ ) ) \bold{L=(\bold{P}_s^{T}(\cdots({P}_{1}^{T}A)\cdots))} L=(PsT(⋯(P1TA)⋯))
- 然后再执依次行对应的列变换 P 1 ⋯ P s \bold{{P}_{1}\cdots{P}_{s}} P1⋯Ps
- R = ( ( ⋯ ( L P 1 ) ⋯ ) P s ) \bold{R=((\cdots(\bold{L}\bold{P}_1)\cdots){P}_s)} R=((⋯(LP1)⋯)Ps)
- 显然 Λ = R = P s T ⋯ P 1 T A P 1 ⋯ P s \bold{\Lambda=R=\bold{P}_s^{T}\cdots{P}_{1}^{T}A\bold{P}_1\cdots{P}_s} Λ=R=PsT⋯P1TAP1⋯Ps
- 可见这种变换顺序是正确的
- 我们可以先将矩阵 A \bold{A} A用一系列的初等行变换化为上三角矩阵,这部分变换对应于 L = P s T ⋯ P 1 T A \bold{L=\bold{P}_s^{T}\cdots{P}_{1}^{T}}\bold{A} L=PsT⋯P1TA,即依次执行 P 1 T ⋯ P s T \bold{P}_1^{T}\cdots\bold{P}_s^{T} P1T⋯PsT
-
当 A \bold{A} A被一系列成对的初等行列变换转为对角阵 Λ \Lambda Λ,则记录列变换的 E \bold{E} E也就变成了 P = P 1 P 2 ⋯ P s \bold{P=P_1P_2\cdots{P_s}} P=P1P2⋯Ps
-
-
因此 P , Λ \bold{P,\Lambda} P,Λ是同时被求解出来:
- 得到的 P \bold{P} P就是能够满足 P T A P = Λ \bold{P^{{T}}AP=\Lambda} PTAP=Λ(即,使二次型标准化)的可逆矩阵,对应的线性变换为 x = P y \bold{x=Py} x=Py
例
-
用初等变换法将 f ( x 1 , x 2 , x 3 ) f(x_1,x_2,x_3) f(x1,x2,x3)= x 1 2 + 2 x 2 2 + 2 x 3 2 − 2 x 1 x 2 + 4 x 1 x 3 − 6 x 2 x 3 x_1^2+2x_2^2+2x_3^2-2x_1x_2+4x_1x_3-6x_2x_3 x12+2x22+2x32−2x1x2+4x1x3−6x2x3
-
解
-
f f f的系数矩阵为
-
A = ( 1 − 1 2 − 1 2 − 3 2 − 3 2 ) \bold{A}=\begin{pmatrix} 1&-1&2\\ -1&2&-3\\ 2&-3&2 \end{pmatrix} A= 1−12−12−32−32
-
将 A \bold{A} A进初等变换化为对角阵 Λ \bold\Lambda Λ
-
先执行初等列变换 L = P 1 T ⋯ P s T A \bold{L}=\bold{P}_1^{T}\cdots\bold{P}_s^{T}\bold{A} L=P1T⋯PsTA使 A \bold{A} A化为上三角阵
-
A → r 2 + r 1 ; r 3 − 2 r 1 ( 1 − 1 2 0 1 − 1 0 − 1 − 2 ) → r 3 + r 2 ( 1 − 1 2 0 1 − 1 0 0 − 3 ) = L \bold{A}\xrightarrow{r_2+r_1;r_3-2r_1} \begin{pmatrix} 1&-1&2\\ 0&1&-1\\ 0&-1&-2 \end{pmatrix} \xrightarrow{r_3+r_2} \begin{pmatrix} 1&-1&2\\ 0&1&-1\\ 0&0&-3 \end{pmatrix} =\bold{L} Ar2+r1;r3−2r1 100−11−12−1−2 r3+r2 100−1102−1−3 =L
-
再依次地执行对称的列变换 R = L P 1 ⋯ P s \bold{R}=\bold{L}\bold{P}_1\cdots\bold{P}_s R=LP1⋯Ps
(1) -
L → c 2 + c 1 ; c 3 − 2 c 1 ( 1 0 0 0 1 − 1 0 0 − 3 ) → c 3 + c 2 ( 1 0 0 0 1 0 0 0 − 3 ) = R \bold{L}\xrightarrow{c_2+c_1;c_3-2c_1} \begin{pmatrix} 1&0&0\\ 0&1&-1\\ 0&0&-3 \end{pmatrix} \xrightarrow{c_3+c_2} \begin{pmatrix} 1&0&0\\ 0&1&0\\ 0&0&-3 \end{pmatrix} =\bold{R} Lc2+c1;c3−2c1 1000100−1−3 c3+c2 10001000−3 =R
-
再计算 P = E P 1 ⋯ P s \bold{P}=\bold{E}\bold{P}_1\cdots\bold{P}_s P=EP1⋯Ps
(2) -
E = ( 1 0 0 0 1 0 0 0 1 ) → c 2 + c 1 ; c 3 − 2 c 1 ( 1 1 − 2 0 1 0 0 0 1 ) → c 3 + c 2 ( 1 1 − 1 0 1 1 0 0 1 ) = P \bold{E}=\begin{pmatrix} 1&0&0\\ 0&1&0\\ 0&0&1 \end{pmatrix} \xrightarrow{c_2+c_1;c_3-2c_1} \begin{pmatrix} 1&1&-2\\ 0&1&0\\ 0&0&1 \end{pmatrix} \xrightarrow{c_3+c_2} \begin{pmatrix} 1&1&-1\\ 0&1&1\\ 0&0&1 \end{pmatrix} =\bold{P} E= 100010001 c2+c1;c3−2c1 100110−201 c3+c2 100110−111 =P
-
-
从而 Λ = R = ( 1 0 0 0 1 0 0 0 − 3 ) \bold{\Lambda=R}=\begin{pmatrix} 1&0&0\\ 0&1&0\\ 0&0&-3 \end{pmatrix} Λ=R= 10001000−3 ; P = ( 1 1 − 1 0 1 1 0 0 1 ) \bold{P}=\begin{pmatrix} 1&1&-1\\ 0&1&1\\ 0&0&1 \end{pmatrix} P= 100110−111
-
即线性变换 x = P y \bold{x=Py} x=Py代入 f ( x ) f(\bold{x}) f(x),得标准形 f ( x ) = f ( P y ) f(\bold{x})=f(\bold{Py}) f(x)=f(Py)= g ( y ) g(\bold{y}) g(y)= y T Λ y \bold{y^T\Lambda{y}} yTΛy,其中 x = ( x 1 , x 2 , x 3 ) \bold{x}=(x_1,x_2,x_3) x=(x1,x2,x3), y = ( y 1 , y 2 , y 3 ) \bold{y}=(y_1,y_2,y_3) y=(y1,y2,y3)
-
用求和式表示为 f f f= y 1 2 + y 2 2 − 3 y 3 2 y_1^2+y_2^2-3y_3^2 y12+y22−3y32
-
相关文章:

LA@二次型@标准化相关原理和方法
文章目录 标准化方法正交变换法🎈求矩阵的特征值求各特征值对应的线性无关特征向量组正交化各个向量组 配方法步骤例例 初等变换法原理总结初等变换法的步骤例 标准化方法 正交变换法🎈 二次型可标准化定理的证明过程给出使用二次型标准化的步骤 该方法…...

Git与IDEA: 解决`dev`分支切换问题及其背后原因 为何在IDEA中无法切换到`dev`分支?全面解析!
🌷🍁 博主猫头虎(🐅🐾)带您 Go to New World✨🍁 🦄 博客首页——🐅🐾猫头虎的博客🎐 🐳 《面试题大全专栏》 🦕 文章图文…...

什么是JavaScript中的严格模式(strict mode)?应用场景是什么?
聚沙成塔每天进步一点点 ⭐ 专栏简介⭐ 严格模式(Strict Mode):⭐ 使用场景⭐ 写在最后 ⭐ 专栏简介 前端入门之旅:探索Web开发的奇妙世界 记得点击上方或者右侧链接订阅本专栏哦 几何带你启航前端之旅 欢迎来到前端入门之旅&…...

红外特征吸收峰特征总结(主要基团的红外特征吸收峰)
特此记录 anlog 2023年9月11日...

ChatGPT AIGC 完成关联分析散点图的应用
关联分析是数据分析中非常重要的一种技术手段,它能够帮助我们在大量数据中发现变量之间的关系和相互影响。在数据分析领域,关联分析被广泛应用于市场营销、销售预测、客户行为分析等领域。 关联分析的主要功能是通过挖掘数据中的关联规则,来发现数据集中事物之间的关联性。…...
开机自启)
CentOS7.6上实现Spring Boot(JAR包)开机自启
前言 Linux自启(或开机自启)指的是在Linux系统启动时自动运行特定的程序或脚本。当计算机启动时,操作系统会按照一定的顺序加载系统服务和配置,其中包括自动启动一些应用程序或服务。这些应用程序或服务会在系统启动后自动运行&a…...

Java开发之框架(spring、springmvc、springboot、mybatis)【面试篇 完结版】
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、框架知识分布二、Spring1. spring-单例bean① 问题引入② 单例bean是线程安全的吗③ 问题总结④ 实战面试 2. spring-AOP① 问题引入② AOP记录操作日志③ …...

QT人脸识别知识
机器学习的作用:根据提供的图片模型通过算法生成数据模型,从而在其它图片中查找相关的目 标。 级联分类器:是用来人脸识别。 在判断之前,我们要先进行学习,生成人脸的模型以便后续识别使用。 人脸识别器:…...

熟悉Redis6
NoSQL数据库简介 技术发展 技术的分类 1、解决功能性的问题:Java、Jsp、RDBMS、Tomcat、HTML、Linux、JDBC、SVN 2、解决扩展性的问题:Struts、Spring、SpringMVC、Hibernate、Mybatis 3、解决性能的问题:NoSQL、Java线程、Hadoop、Nginx…...

ip地址会随网络变化而变化吗
随着科技的飞速发展,互联网已深入我们生活的方方面面。在这庞大的网络世界中,IP地址作为网络通信的基础元素,引起了广泛关注。网络变化与IP地址之间存在着密切的关系。那么,IP地址是否会随着网络变化而变化呢?虎观代理…...

QT连接服务器通信,客户端以及服务器端
服务器端 .h文件 #ifndef WIDGET_H #define WIDGET_H#include <QWidget> #include <QTcpServer> //服务器头文件 #include <QTcpSocket> //客户端头文件 #include <QList> //链表头文件,用来存放客户端容器 #include <QDebug> #i…...

Vuex仓库的创建
vuex 的使用 - 创建仓库 文章目录 vuex 的使用 - 创建仓库1.安装 vuex2.新建 store/index.js 专门存放 vuex3.创建仓库 store/index.js4 在 main.js 中导入挂载到 Vue 实例上5.测试打印Vuex 1.安装 vuex 安装vuex与vue-router类似,vuex是一个独立存在的插件&#x…...
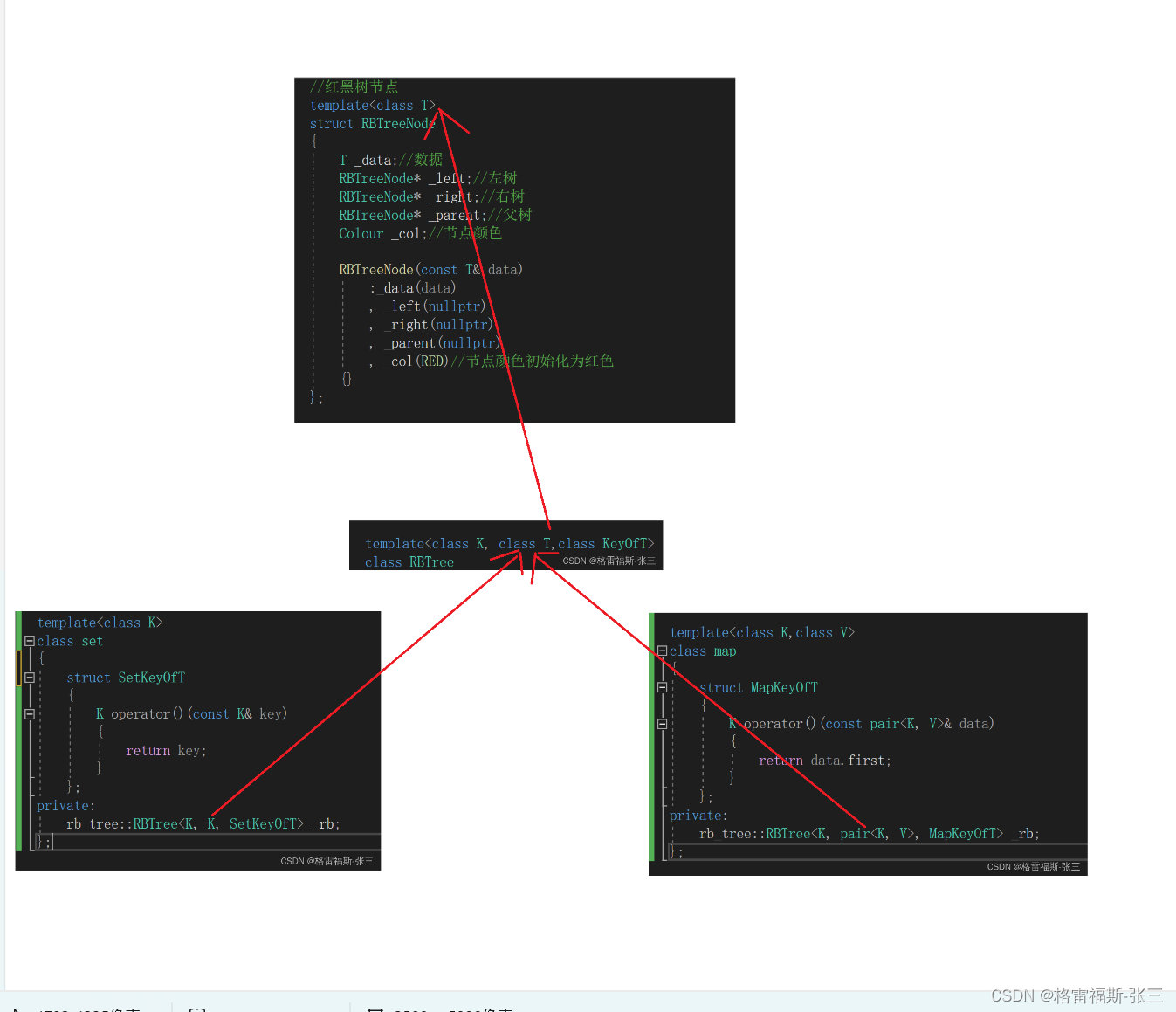
C++中的红黑树
红黑树 搜索二叉树搜索二叉树的模拟实现平衡搜索二叉树(AVL Tree)平衡搜索二叉树的模拟实现红黑树(Red Black Tree)红黑树的模拟实现 红黑树的应用(Map 和 Set)Map和Set的封装 搜索二叉树 搜索二叉树的概念:二叉搜索树又称二叉排序树,它或者是一棵空树&…...
SQL语法知识回顾
一、SQL语言的分类 由于数据库管理系统(数据库软件)功能非常多,不仅仅是存储数据,还要包含:数据的管理、表的管理、库的管理、账户管理、权限管理等等。所以,操作数据库的SQL语言,也基于功能&am…...
)
Java基础二十七(泛型)
泛型 Java 泛型(generics)是 JDK 5 中引入的一个新特性, 泛型提供了编译时类型安全检测机制,该机制允许程序员在编译时检测到非法的类型。 泛型的本质是参数化类型,也就是说所操作的数据类型被指定为一个参数。 Java的泛型是伪…...

Python入门教程36:urllib网页请求模块的用法
urllib是Python中的一个模块,它提供了一些函数和类,用于发送HTTP请求、处理URL编码、解析URL等操作。无需安装即可使用,包含了4个模块: #我的Python教程 #官方微信公众号:wdPythonrequest:它是最基本的htt…...

LeetCode 每日一题 2023/9/4-2023/9/10
记录了初步解题思路 以及本地实现代码;并不一定为最优 也希望大家能一起探讨 一起进步 目录 9/4 449. 序列化和反序列化二叉搜索树9/5 2605. 从两个数字数组里生成最小数字9/6 1123. 最深叶节点的最近公共祖先9/7 2594. 修车的最少时间9/8 2651. 计算列车到站时间9/…...
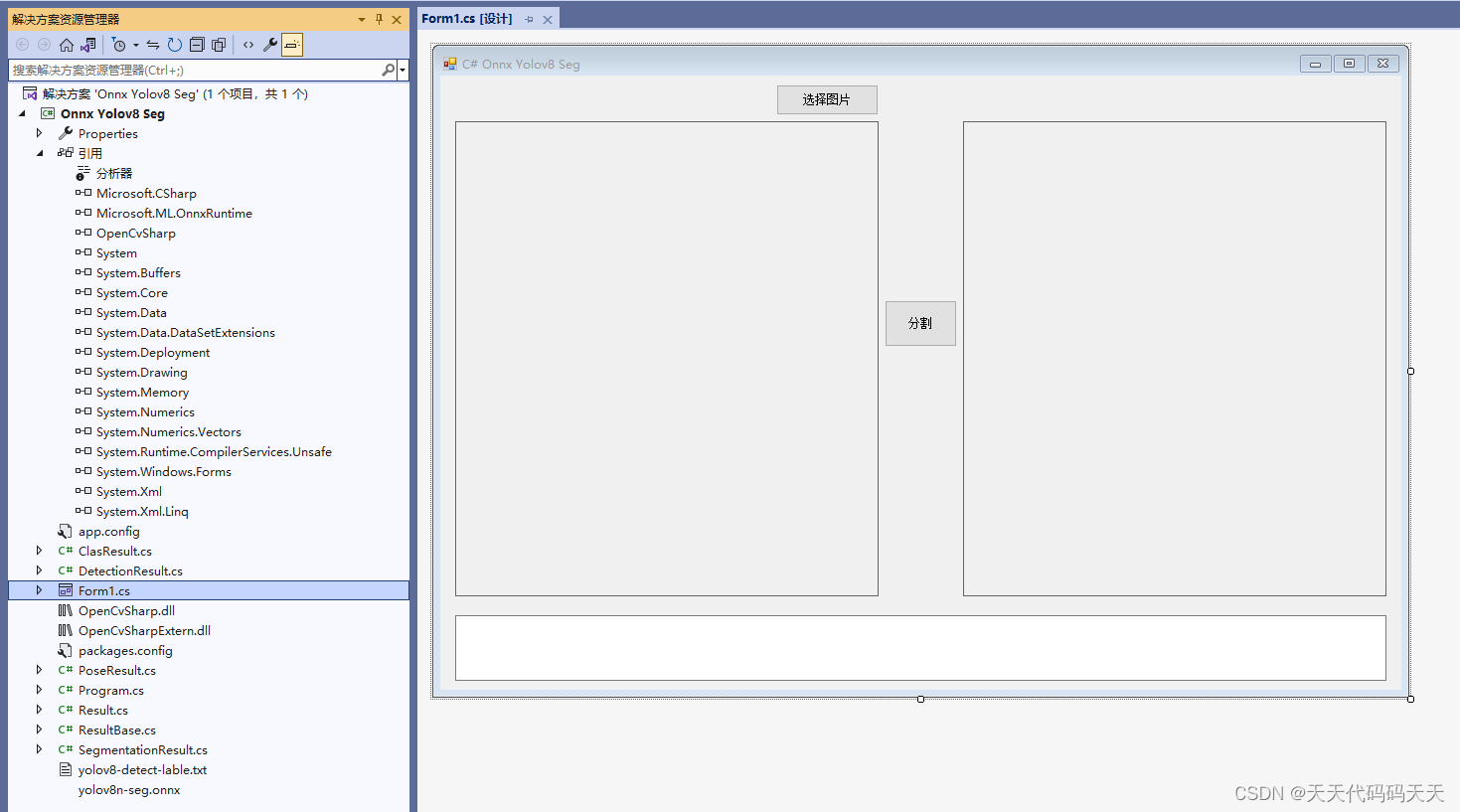
C# Onnx Yolov8 Seg 分割
效果 项目 代码 using Microsoft.ML.OnnxRuntime; using Microsoft.ML.OnnxRuntime.Tensors; using OpenCvSharp; using System; using System.Collections.Generic; using System.ComponentModel; using System.Data; using System.Drawing; using System.Linq; using System…...

Postman接口测试流程
一、工具安装 ● 安装Postman有中文版和英文版,可以选择自己喜欢的版本即可。安装时重新选择一下安装路径(也可以默认路径),一直下一步安装完成即可。(本文档采用英文版本)安装文件网盘路径链接࿱…...

探索GreatADM:如何快速定义监控
引文 在数据库运维过程中,所使用的运维管理平台是否存在这样的问题: 1、默认监控粒度不够,业务需要更细颗粒度的监控数据。2、平台默认的监控命令不适合,需要调整阈值量身定制监控策略。3、不同类型的实例或组件需要有不同的监控重点,但管理平台监控固…...

Phi-4-mini-reasoning惊艳效果展示:高精度数学推导+代码生成对比实测
Phi-4-mini-reasoning惊艳效果展示:高精度数学推导代码生成对比实测 1. 开篇:小模型的大智慧 Phi-4-mini-reasoning这款仅有3.8B参数的轻量级开源模型,正在重新定义我们对小型语言模型能力的认知。专为数学推理、逻辑推导和多步解题等强逻辑…...

【开源实战】LMCache如何用KV缓存“驯服”大模型推理的显存猛兽?
1. 从显存爆炸到性能飞跃:LMCache的破局之道 第一次部署70B参数的大模型时,我被显存占用吓得差点摔了咖啡杯——加载一个长文档问答请求,显存占用直接飙到140GB,GPU瞬间亮起内存不足的警报。这种场景下,传统KV缓存机制…...

第二十一章 项目启动与治理架构:从招标到甲乙方协作机制的建立
第四篇 项目交付与工程管理写代码是工程,交付是艺术与政治的混合体。 第四篇解决的是一个在技术书籍里经常被回避的核心问题:如何在复杂的国企环境、多供应商格局和真实的一线压力下,把一个工业互联网系统真正交到用户手里,并让它…...

DMA2D 加速 LVGL 渲染:从基础配置到性能优化实战
1. DMA2D硬件加速器基础解析 第一次接触STM32的DMA2D控制器时,我被这个外设的名字搞糊涂了——明明叫"DMA",却专门处理图形操作。后来在STM32F746G-DISCO开发板上实测才发现,这个Chrom-ART加速器简直是嵌入式GUI的性能救星。简单来…...

Sharetribe Go社区管理技巧:如何运营活跃的交易社区
Sharetribe Go社区管理技巧:如何运营活跃的交易社区 【免费下载链接】sharetribe Sharetribe Go is Sharetribes old source-available marketplace software, which was also available as a hosted SaaS product. Sharetribe Go is no longer actively maintained…...

告别Qt调试器报错:一份详细的CDB配置避坑指南与原理浅析
告别Qt调试器报错:一份详细的CDB配置避坑指南与原理浅析 调试是开发过程中不可或缺的一环,但当你在Qt Creator中满怀期待地按下调试按钮,却看到"Unable to create a debugging engine"这样的错误提示时,那种挫败感可想而…...
)
AWS 账单查看与付款方式设置指南(企业支持实用手册)
一文搞定 AWS 发票下载、费用明细查询和电汇付款配置,适合企业财务和运维人员快速上手。 前言 使用 AWS 的企业经常会遇到这几个问题:月底了发票在哪下载?费用明细怎么导出给财务?公司要用银行电汇付款怎么设置? 这篇文章把这三件事讲清楚,都是控制台操作,不需要写代码…...

别再被‘ANOMALY: meaningless REX prefix’弹窗搞懵了!手把手教你排查Python环境、杀软和系统监控的锅
解码"ANOMALY: meaningless REX prefix":从Python环境到系统监控的全链路排查指南 当你正在Windows终端中专注地执行命令,突然弹出一个令人困惑的警告——"ANOMALY: meaningless REX prefix used"。这个看似晦涩的错误不仅打断了你的…...

Qt6.8编译路径问题解析:解决QMainWindow文件缺失的三种方案
1. 遇到Qt6.8编译错误时的第一反应 当你满怀期待地打开Qt Creator准备编译项目,突然蹦出一个红色错误提示:"...\Qt6.8.2\6.8.2\msvc2022_64\include\QtWidgets\QMainWindow does not exist",这时候的心情就像煮熟的鸭子飞走了。别担…...
)
支承套零件加工工艺编程及夹具(论文+图纸)
支承套作为机械传动系统中的关键零件,其加工精度直接影响设备运行的稳定性与寿命。在传统加工模式下,工序分散、定位误差累积等问题常导致零件合格率波动,而专用夹具的设计与数控编程技术的结合,为解决这一难题提供了有效路径。通…...