9.1.tensorRT高级(4)封装系列-自动驾驶案例项目self-driving-道路分割分析
目录
- 前言
- 1. 道路分割
- 总结
前言
杜老师推出的 tensorRT从零起步高性能部署 课程,之前有看过一遍,但是没有做笔记,很多东西也忘了。这次重新撸一遍,顺便记记笔记。
本次课程学习 tensorRT 高级-自动驾驶案例项目self-driving-道路分割分析
课程大纲可看下面的思维导图

1. 道路分割
这节我们学习自动驾驶场景中的模型案例
1. 这个案例中存在 4 个模型,分别是:车辆检测 YoloX、车道线检测、道路分割、深度估计
2. 学习把该案例的模型跑起来,对不同任务进行了解
项目地址:https://github.com/iwatake2222/self-driving-ish_computer_vision_system

我们只需要拿到项目提供的模型并导出 ONNX 就行了,至于其它的环境配置等我们就不用关注了
那在案例中提供了下载好的模型,因此我们可以直接看案例代码
我们先来看道路分割模型,我们的目的是找到道路分割的 onnx,分析其 onnx 的大致使用逻辑,然后写出最简洁版本的 predict.py,大体可以分为以下三步:
1. 打开道路分割的 onnx,查看其输入与输出
2. 查看代码,找到 onnx 的预处理,分析得到预处理的逻辑
3. 针对获得的信息,编写 predict.py,尝试写出来
我们来观察下其 onnx 模型,如下图所示:

从导出的 onnx 我们可以了解并猜测:
- 输入是 1x3x512x896
- 输出是 1x512x896x4,并且是概率值,0~1,仅仅是不确定 4 通道代表什么
- 可能代表:可行驶区域、车道线、不可行驶区域、马路牙子
我们通过分析项目中的 image_processor/semantic_segmentation_engine.cpp 文件可以得出具体的预处理所做的工作:(详细分析请参照视频)
- normalize → \rightarrow → mean = 0, norm = 1.0
- 对输入图像直接 resize 到 height=512,width=896
- 确定输入的图像就是 BGR 图像
- normalize = (src_image - normalize.mean) * normalize.norm
我们可以简单的写个预处理程序来验证下,代码如下:
import onnxruntime
import cv2
import numpy as npsession = onnxruntime.InferenceSession("workspace/road-segmentation-adas.onnx", provider_options=["CPUExecutionProvider"])image = cv2.imread("workspace/imgs/dashcam_00.jpg")
image = cv2.resize(image, (896, 512))
image_tensor = image.astype(np.float32)
image_tensor = image_tensor.transpose(2, 0, 1)[None]prob = session.run(["tf.identity"], {"data": image_tensor})[0]print(prob.shape)cv2.imwrite("prob0.jpg", prob[0, :, :, 1] * 255)
输出如下图:

可以看到输出符合我们的预期,输出的概率图如下所示:

总结
本次课程学习了开源项目中的道路分割案例,主要是对道路分割模型的 onnx 进行了简单分析,并通过对项目代码的分析将预处理部分理清楚,然后通过 onnxruntime 进行了简单验证。
次课程学习了开源项目中的道路分割案例,主要是对道路分割模型的 onnx 进行了简单分析,并通过对项目代码的分析将预处理部分理清楚,然后通过 onnxruntime 进行了简单验证。
相关文章:
9.1.tensorRT高级(4)封装系列-自动驾驶案例项目self-driving-道路分割分析
目录 前言1. 道路分割总结 前言 杜老师推出的 tensorRT从零起步高性能部署 课程,之前有看过一遍,但是没有做笔记,很多东西也忘了。这次重新撸一遍,顺便记记笔记。 本次课程学习 tensorRT 高级-自动驾驶案例项目self-driving-道路分…...
稳定的 Glance 来了,安卓小部件有救了!
稳定的 Glance 来了,安卓小部件有救了! 稳定版本的 Glance 终于发布了,来一起看看吧,看看这一路的旅程,看看好用么,再看看如何使用! 前世今生 故事发生在两年的一天吧,其实夸张了…...
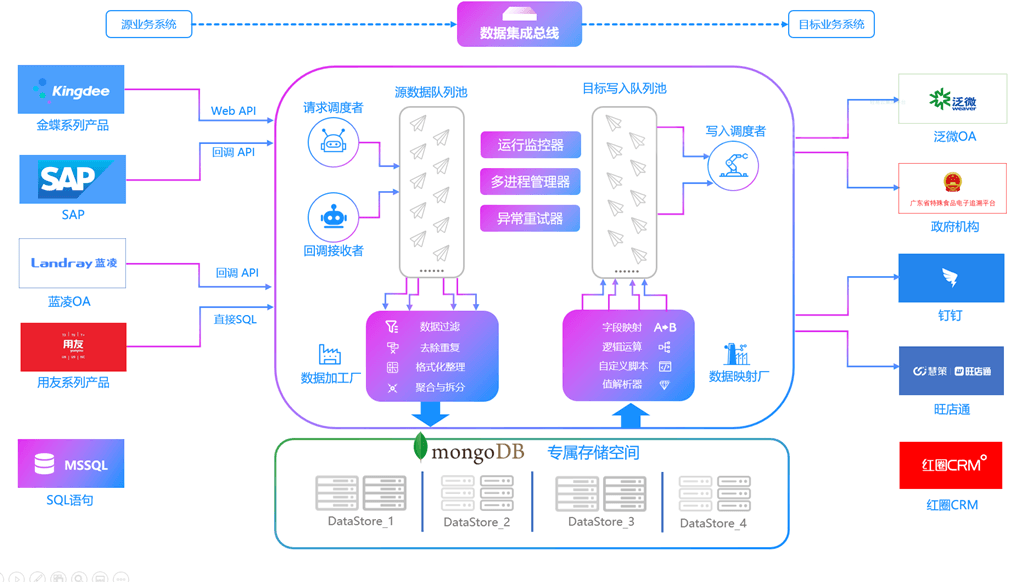
用友U8与MES系统API接口对接案例分析
企业数字化转型:轻易云数据集成平台助力 U8 ERPMES 系统集成 为什么选择数字化转型? 领导层对企业资源规划(ERP)的深刻理解促使了数字化转型的启动。采用精确的“N5”滚动计划,为供应商提供充分的预期信息,…...

web UI自动化介绍
文章目录 一、web UI自动化介绍1.1 执行UI自动化测试前提1.2 Selenium介绍以及知识点梳理 二、Selenium 学习2.1 基础2.1.1 环境安装与基础使用2.1.2 web浏览器控制2.1.3 常见控件的八大定位方式2.1.3.1 八大定位方式介绍2.1.3.2 NAME、ID定位2.1.3.3 css_selector定位2.1.3.4 …...

小米13Pro/13Ultra刷面具ROOT后激活LSPosed框架微X模块详细教程
喜欢买小米手机,很多是因为小米手机的开放,支持root权限,而ROOT对普通用户来说更多的是刷入DIY模块功能,今天ROM乐园小编就教大家如何使用面具ROOT,实现大家日常情况下非常依赖的微X模块功能,体验微X模块的…...

文盘Rust -- 给程序加个日志 | 京东云技术团队
日志是应用程序的重要组成部分。无论是服务端程序还是客户端程序都需要日志做为错误输出或者业务记录。在这篇文章中,我们结合log4rs聊聊rust 程序中如何使用日志。 log4rs类似java生态中的log4j,使用方式也很相似 log4rs中的基本概念 log4rs 的功能组件也由 appe…...
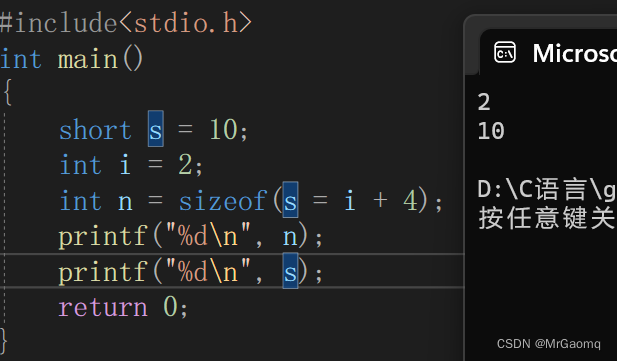
C语言深入理解指针(非常详细)(五)
目录 回调函数qsort使用举例qsort函数的模拟实现sizeof和strlen的对比sizeofstrlensizeof和strlen的对比一道关于sizeof的题 回调函数 回调函数就是一个通过函数指针调用的函数 如果你把函数的指针(地址)作为参数传递给另一个函数,当这个指…...
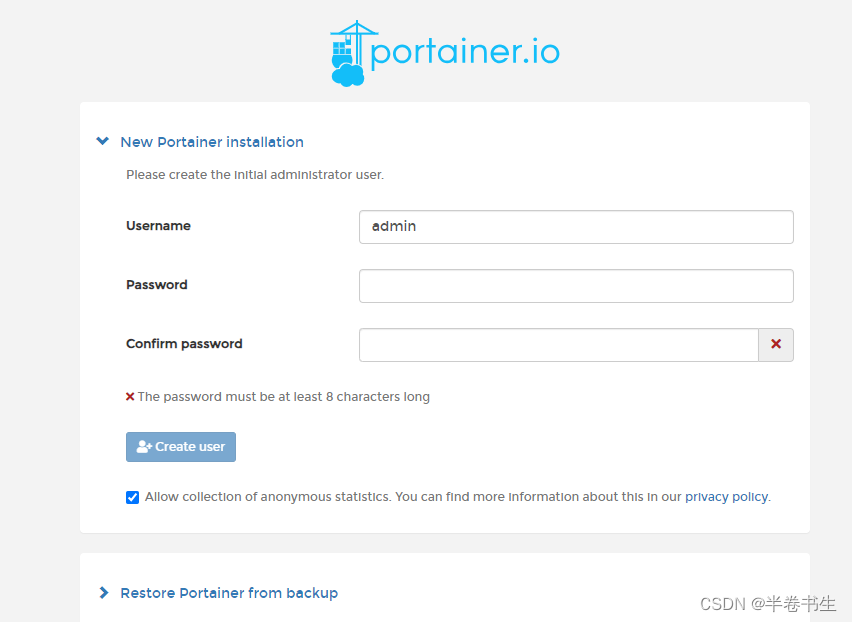
[docker]笔记-portainer的安装
1、portainer是一款可视化的容器管理软件,利用portainer可以轻松方便的管理和创建容器。portainer本身是一个容器,完全免费并且具有汉化版。本文介绍portainer的安装和使用。 2、安装好容器并配置好容器环境,可参照https://blog.csdn.net/bl…...
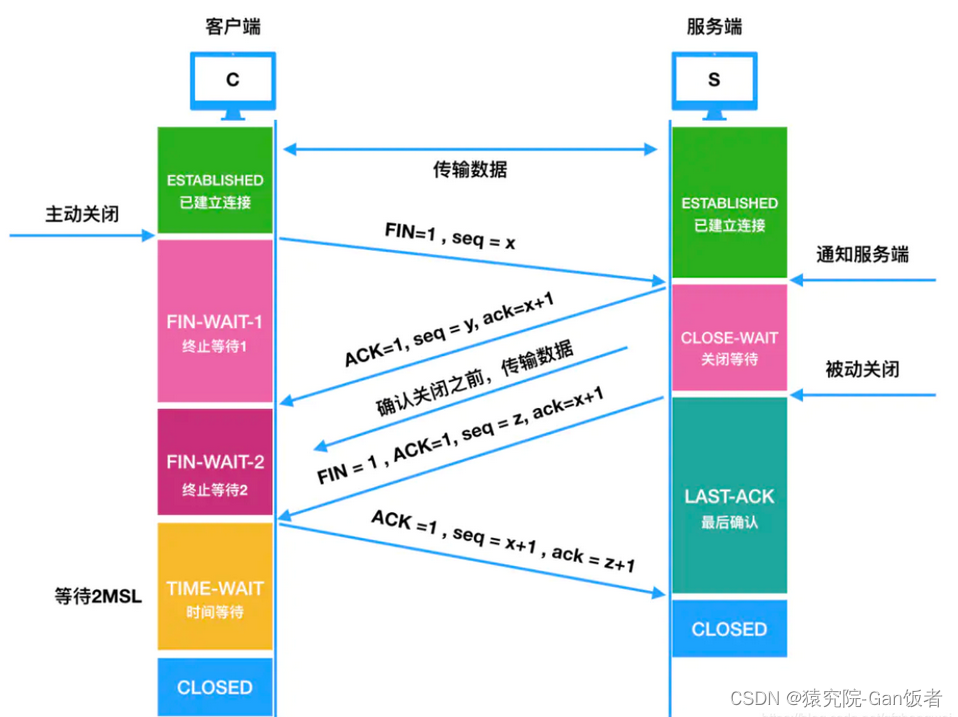
详解TCP/IP的三次握手和四次挥手
文章目录 前言一、TCP/IP协议的三次握手1.1 三次握手流程 二、TCP/IP的四次挥手2.1 四次挥手流程 三、主要字段3.1、标志位(Flags)3.2、序号(sequence number)3.3、确认号(acknowledgement number) 四、状态…...
YOLOv5算法改进(16)— 增加小目标检测层
前言:Hello大家好,我是小哥谈。小目标检测层是指在目标检测任务中用于检测小尺寸目标的特定网络层。由于小目标具有较小的尺寸和低分辨率,它们往往更加难以检测和定位。YOLOv5算法的检测速度与精度较为平衡,但是对于小目标的检测效…...
)
蓝桥杯官网练习题(图像模糊)
题目描述 小蓝有一张黑白图像,由 nm 个像素组成,其中从上到下共 n 行,每行从左到右 �m 列。每个像素由一个 0 到 255 之间的灰度值表示。 现在,小蓝准备对图像进行模糊操作,操作的方法为: 对…...

使用鳄鱼指标和ADX开立空头的条件,3秒讲清楚
使用鳄鱼指标和ADX开立空头的条件其实很简单,anzo capital昂首资本3秒钟讲清楚。 首先,市场行情需呈水平状态。再者,均线体系开始向上发散,给出明确的信号。最后,ADX确认该信号,要求指数上涨20%以上&#…...

RabbitMQ死信队列与延迟队列
目录 死信队列 死信队列的定义 死信队列的应用场景 死信队列的作用 死信队列架构图 死信队列代码实现 延迟队列 延迟队列的定义 延迟队列的应用场景 延迟队列的作用 延迟队列架构图 延迟队列的代码实现 死信队列 死信队列的定义 死信队列(Dead Letter …...

存储管理呀
世界太吵,别听,别看,别管,别怕,向前走 一. 存储管理 初识硬盘 机械 HDD 固态 SSDSSD的优势 SSD采用电子存储介质进行数据存储和读取的一种技术,拥有极高的存储性能,被认为是存储技术发展的未来…...

学习 BeautifulSoup 库从入门到精通
可以按照以下步骤进行: 1. 安装 BeautifulSoup: 首先,确保你已经安装了 Python。然后可以使用 pip 命令来安装 BeautifulSoup 库。在命令行中输入以下命令: pip install beautifulsoup42. 导入 BeautifulSoup: 在 …...

JavaScript基础知识总结
目录 一、js代码位置 二、变量与数据类型 1、声明变量 2、基本类型(7种基本类型) 1、undefined和null 2、String ⭐ 模板字符串(Template strings) 3、number和bigint ⭐ 4、boolean ⭐ 5、symbol 3、对象类型 1、Fun…...

技术面试与HR面:两者之间的关联与区别
🌷🍁 博主猫头虎(🐅🐾)带您 Go to New World✨🍁 🦄 博客首页——🐅🐾猫头虎的博客🎐 🐳 《面试题大全专栏》 🦕 文章图文…...
【Redis】为什么要学 Redis
文章目录 前言一、Redis 为什么快二、Redis 的特性2.1 将数据储存到内存中2.2 可编程性2.3 可扩展性2.4 持久性2.5 支持集群2.6 高可用性 三、Redis 的应用场景四、不能使用 Redis 的场景 前言 关于为什么要学 Redis 这个问题,一个字就可以回答,那就是&…...
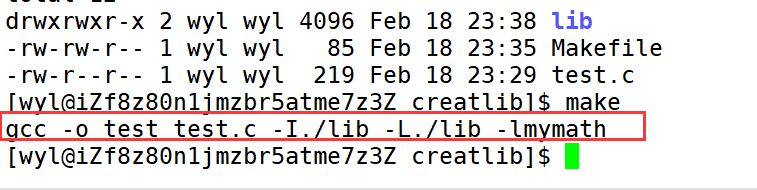
动静态库生成使用
🔥🔥 欢迎来到小林的博客!! 🛰️博客主页:✈️林 子 🛰️博客专栏:✈️ Linux 🛰️社区 :✈️ 进步学堂 🛰…...

LLVM编译安装
LLVM编译安装 #全量下载 git clone https://github.com/llvm/llvm-project.git #只下载最新commit版本 git clone --depth 1 https://github.com/llvm/llvm-project.git#配置 #!/bin/bash set -ex cmake -S llvm -B build -DCMAKE_INSTALL_PREFIX/data0/huozai/software/insta…...

Kerberos身份认证原理与企业级排错实战指南
1. 这不是“另一个登录框”,而是一套精密运转的身份验证齿轮系统很多人第一次听说 Kerberos,是在公司内网登录邮箱或访问内部系统时,看到那个带小盾牌图标的弹窗——“正在使用 Kerberos 协议进行身份验证”。于是下意识觉得:“哦…...
原理与ScalableHD架构优化实践)
超维计算(HDC)原理与ScalableHD架构优化实践
1. 超维计算(HDC)基础解析超维计算(Hyperdimensional Computing, HDC)是一种受大脑信息处理机制启发的计算范式,其核心思想是用高维随机向量(通常称为超向量或HV)来表示和处理信息。与传统神经网…...

LDBlockShow实战指南:基因组连锁不平衡分析与可视化解决方案
LDBlockShow实战指南:基因组连锁不平衡分析与可视化解决方案 【免费下载链接】LDBlockShow LDBlockShow: a fast and convenient tool for visualizing linkage disequilibrium and haplotype blocks based on VCF files 项目地址: https://gitcode.com/gh_mirror…...

为什么你的霓虹总像“塑料灯带”?Midjourney光子散射模拟缺陷曝光:3个被官方隐瞒的--sref调参禁区
更多请点击: https://kaifayun.com 第一章:为什么你的霓虹总像“塑料灯带”? 霓虹效果在现代 UI 设计中无处不在——按钮悬停、加载指示器、焦点高亮……但多数实现却流于表面:生硬的 box-shadow、固定色值的渐变边框、缺乏物理感…...

别再只会用--nogpgcheck了!手把手教你安全修复PostgreSQL yum源的GPG密钥问题
企业级PostgreSQL部署:安全解决GPG密钥验证的完整方案 当你在生产环境中部署PostgreSQL时,遇到GPG签名验证错误直接使用--nogpgcheck绕过检查,就像因为门锁打不开就直接把门拆掉一样危险。本文将带你深入理解GPG验证机制,并提供一…...
)
Lindy多步骤任务自动化落地全图谱(企业级架构师压箱底实践)
更多请点击: https://codechina.net 第一章:Lindy多步骤任务自动化落地全图谱(企业级架构师压箱底实践) Lindy效应在自动化系统设计中揭示了一个关键洞察:越久经考验的实践,其未来预期寿命越长。Lindy多步…...

公共卫生机器学习项目中的算法公平性实践:ACAR框架详解
1. 项目概述:当机器学习遇见公共卫生,公平性为何成为“必答题”?在公共卫生领域,机器学习(ML)正以前所未有的速度渗透到疾病监测、风险分层和资源分配等核心环节。想象一下,一个模型被用来预测某…...

DRG存档编辑器终极指南:如何快速解锁《深岩银河》的全部游戏体验
DRG存档编辑器终极指南:如何快速解锁《深岩银河》的全部游戏体验 【免费下载链接】DRG-Save-Editor Rock and stone! 项目地址: https://gitcode.com/gh_mirrors/dr/DRG-Save-Editor 还在为《深岩银河》中无尽的资源收集和等级提升感到疲惫吗?DRG…...

Hyper-V离散设备分配图形化解决方案:企业级虚拟化性能优化实践
Hyper-V离散设备分配图形化解决方案:企业级虚拟化性能优化实践 【免费下载链接】DDA 实现Hyper-V离散设备分配功能的图形界面工具。A GUI Tool For Hyper-Vs Discrete Device Assignment(DDA). 项目地址: https://gitcode.com/gh_mirrors/dd/DDA 在数字化转…...

5步快速上手OpenVSP:免费开源的飞机参数化设计终极指南
5步快速上手OpenVSP:免费开源的飞机参数化设计终极指南 【免费下载链接】OpenVSP A parametric aircraft geometry tool 项目地址: https://gitcode.com/gh_mirrors/ope/OpenVSP OpenVSP是一款由NASA开发的免费开源飞机参数化设计工具,让航空工程…...