ADAS自动驾驶
文章目录
- ADAS技术现状
- ADAS功能的主流方案
- ADAS控制器开发
- 自动驾驶技术现状
- 自动驾驶域控制器开发
- 智能驾驶域控制器芯片选择
ADAS技术现状
自动驾驶辅助系统(ADAS,Advanced Driver Assistance Systems)是一种用于提高驾驶安全和舒适性的技术,通过各种传感器和控制器实现对车辆的实时监控和控制。近年来,随着传感器技术、计算能力和人工智能的发展,ADAS技术得到了快速的发展和广泛的应用。以下是ADAS技术的一些现状:
-
功能丰富:现代ADAS系统已经具备了许多功能,如自动紧急制动(AEB)、自适应巡航控制(ACC)、车道保持辅助(LKA)、盲点监测(BSM)、交通标志识别(TSR)等。这些功能可以帮助驾驶员更好地应对复杂的道路环境,提高行车安全。
-
智能化程度不断提高:随着人工智能技术的发展,ADAS系统的智能化程度不断提高。例如,通过深度学习技术,ADAS系统可以更准确地识别道路上的行人、车辆和交通标志,从而做出更加合理的驾驶决策。
-
传感器技术的进步:ADAS系统依赖于各种传感器(如摄像头、雷达、激光雷达等)来获取车辆周围的环境信息。随着传感器技术的进步,ADAS系统可以获取更加精确和丰富的环境信息,从而提高系统的性能。
-
车辆间通信技术的发展:车辆间通信(V2X)技术可以实现车辆之间的信息交换,从而使ADAS系统具备更强的预测和决策能力。例如,通过V2X技术,ADAS系统可以提前获取前方车辆的行驶状态,从而提前做出相应的调整,提高行车安全。
-
标准化和法规的完善:随着ADAS技术的普及,各国政府和行业组织正在制定相关的标准和法规,以确保ADAS系统的安全和可靠。例如,欧洲新车评价程序(Euro NCAP)已经将ADAS功能纳入了车辆安全评分体系。
-
市场需求不断增长:随着消费者对汽车安全和舒适性的需求不断提高,ADAS技术在汽车市场的需求也在不断增长。据预测,到2025年,全球ADAS市场规模将达到500亿美元以上。
总之,ADAS技术在近年来得到了快速发展,已经成为汽车行业的重要发展方向。随着技术的进步和市场需求的增长,ADAS技术将在未来继续发挥更大的作用,为驾驶员提供更加安全、舒适的驾驶体验。
ADAS功能的主流方案
目前ADAS(高级驾驶辅助系统)功能的主流方案主要包括以下几种:
-
前向碰撞预警(FCW)和自动紧急制动(AEB):通过摄像头、雷达或激光雷达等传感器检测前方车辆、行人和障碍物,预警驾驶员可能发生的碰撞,并在必要时自动启动紧急制动,降低碰撞速度或避免碰撞。
-
车道保持辅助(LKA)和车道偏离警告(LDW):通过摄像头识别道路上的车道线,监测车辆是否偏离车道,向驾驶员发出警告或自动进行微调,使车辆回到正确的车道内。
-
自适应巡航控制(ACC):通过雷达或摄像头监测前方车辆的速度和距离,自动调整车辆速度,以保持与前车的安全距离。
-
交通标志识别(TSR):通过摄像头识别道路上的交通标志,如限速标志、禁止通行等,并将信息显示在仪表盘上,提醒驾驶员遵守交通规则。
-
盲点监测(BSM)和后方交叉交通警告(RCTA):通过侧后方的雷达或摄像头监测车辆的盲点区域,提醒驾驶员注意潜在的碰撞风险。
-
倒车影像和全景影像:通过车辆周围的摄像头捕捉车辆周围的环境,辅助驾驶员进行倒车、泊车等操作。
-
自动泊车辅助(APA):通过车辆周围的传感器和摄像头,自动识别合适的停车位,并辅助驾驶员完成泊车操作。
-
疲劳驾驶监测:通过摄像头监测驾驶员的面部表情和眼睛动作,判断驾驶员是否疲劳,提醒驾驶员休息。
这些功能可以单独使用,也可以组合使用,形成更为完善的驾驶辅助系统。随着技术的发展,未来ADAS功能将更加智能化、集成化,为驾驶员提供更加安全、舒适的驾驶体验。
ADAS控制器开发
ADAS(Advanced Driver Assistance Systems,高级驾驶员辅助系统)是一种旨在提高驾驶安全和舒适性的汽车技术。ADAS控制器是实现这些功能的核心组件,负责处理来自各种传感器的数据并做出相应的控制决策。ADAS控制器开发涉及到多个领域的知识,包括硬件设计、嵌入式软件开发、传感器技术、控制算法、通信协议等。
以下是ADAS控制器开发的主要步骤:
-
需求分析:首先需要明确ADAS控制器需要实现的功能,例如自动泊车、自适应巡航控制、车道保持辅助等。这将决定控制器的硬件和软件设计。
-
系统架构设计:根据需求分析,设计ADAS控制器的系统架构,包括硬件组件(如处理器、传感器接口、通信接口等)和软件模块(如数据处理、控制算法、通信协议等)。
-
硬件设计:选择合适的处理器、传感器接口和通信接口等硬件组件,并设计电路板。硬件设计需要考虑性能、功耗、成本等因素。
-
嵌入式软件开发:开发运行在ADAS控制器上的嵌入式软件,包括底层驱动、操作系统、数据处理、控制算法等模块。软件开发需要考虑实时性、可靠性、可维护性等因素。
-
控制算法设计:根据ADAS功能需求,设计相应的控制算法,如路径规划、速度控制、转向控制等。控制算法需要考虑实时性、稳定性、鲁棒性等因素。
-
传感器技术:选择合适的传感器(如摄像头、雷达、激光测距仪等)并集成到ADAS控制器中。传感器技术需要考虑测量范围、精度、可靠性等因素。
-
通信协议:设计ADAS控制器与其他车辆系统(如动力系统、制动系统、转向系统等)之间的通信协议,如CAN、LIN、FlexRay等。
-
集成与测试:将ADAS控制器集成到汽车系统中,并进行功能测试、性能测试、安全测试等。
-
优化与调试:根据测试结果,对ADAS控制器进行优化和调试,以满足性能、安全、可靠性等要求。
-
生产与部署:将开发完成的ADAS控制器投入生产,并部署到汽车系统中。
总之,ADAS控制器开发是一个涉及多个领域知识的复杂过程,需要多学科的专业人才进行协同合作。随着自动驾驶技术的发展,ADAS控制器将在未来汽车中发挥越来越重要的作用。
自动驾驶技术现状
自动驾驶技术已经取得了显著的进展,但仍然处于发展阶段。目前,自动驾驶技术可以分为五个级别,从0级(无自动化)到5级(完全自动化)。以下是自动驾驶技术的现状:
- 部分自动驾驶(级别1和2):许多现代汽车已经配备了部分自动驾驶功能,如自适应巡航控制、自动泊车和车道保持辅助等。这些功能可以在特定情况下辅助驾驶员,但驾驶员仍需时刻保持对车辆的控制。
- 条件自动驾驶(级别3):在这个级别,汽车可以在特定场景(如高速公路)下完全接管驾驶任务,但驾驶员仍需随时准备接管控制。目前,有限的汽车型号(如奥迪A8)已经实现了这一级别的自动驾驶。
- 高度自动驾驶(级别4):这个级别的汽车可以在大部分场景下无需驾驶员干预,但仍然需要驾驶员在某些特定情况下接管控制。目前,这一级别的自动驾驶技术仍在测试阶段,尚未大规模商用。
- 完全自动驾驶(级别5):这是自动驾驶技术的终极目标,即汽车在所有场景下都无需驾驶员干预。目前,这一级别的技术仍在研发阶段,尚未实现。
- 自动驾驶测试:许多公司(如Waymo、特斯拉、Cruise等)正在进行自动驾驶汽车的公共道路测试。这些测试旨在评估自动驾驶系统的性能、安全性和可靠性,为未来的商业化铺平道路。
- 法规和政策:随着自动驾驶技术的发展,各国政府也在制定相应的法规和政策,以确保自动驾驶汽车的安全和合规。这些法规和政策对自动驾驶技术的发展和推广具有重要影响。总之,自动驾驶技术已经取得了一定的进展,但仍需在技术、法规和社会接受度等方面克服一系列挑战,才能实现大规模商用。
自动驾驶域控制器开发
自动驾驶域控制器(ADCU)是一种用于自动驾驶汽车的关键硬件和软件组件,负责整合和协调车辆的各种传感器、执行器和控制系统。开发自动驾驶域控制器需要跨足多个领域,包括硬件设计、嵌入式软件开发、通信协议、控制算法、人工智能和机器学习等。以下是开发自动驾驶域控制器的一些建议步骤:
-
硬件设计:首先,需要选择合适的处理器、传感器和执行器,以满足自动驾驶系统的性能要求。处理器需要具有足够的计算能力来处理来自各种传感器的数据,并实时执行控制算法。传感器(如激光雷达、摄像头、雷达等)需要能够提供足够的环境感知能力,而执行器(如电动机、刹车、转向等)需要能够精确地控制车辆的运动。
-
嵌入式软件开发:自动驾驶域控制器需要运行实时操作系统(RTOS),以确保对关键任务的及时响应。嵌入式软件开发需要考虑处理器的资源限制,如内存和计算能力,并优化代码以提高性能。
-
通信协议:自动驾驶域控制器需要与车辆的其他系统(如动力总成、刹车、转向等)进行通信。这通常通过车载网络(如CAN、FlexRay或以太网)实现。开发人员需要熟悉这些通信协议,并确保域控制器能够与其他系统正确地交换信息。
-
控制算法:自动驾驶域控制器需要实现各种控制算法,如路径规划、运动控制、决策和控制等。这些算法需要根据传感器数据和预定的策略来生成控制指令,以实现自动驾驶功能。
-
人工智能和机器学习:自动驾驶系统需要利用人工智能和机器学习技术来提高环境感知、决策和控制的性能。这可能包括使用深度学习算法来识别道路标志和交通状况,或者使用强化学习来优化控制策略。
-
验证和测试:自动驾驶域控制器的开发需要进行严格的验证和测试,以确保其性能和安全性。这包括在仿真环境中进行大量的软件测试,以及在实际车辆上进行硬件和系统集成测试。
-
安全和认证:自动驾驶域控制器需要满足严格的安全标准,如ISO 26262。开发人员需要遵循安全开发流程,并确保域控制器通过了相关的认证。
总之,自动驾驶域控制器的开发涉及多个领域的知识和技能。开发人员需要不断学习和实践,以掌握这些技术,并为自动驾驶汽车的发展做出贡献。
智能驾驶域控制器芯片选择
在选择智能驾驶域控制器芯片时,需要考虑以下几个关键因素:
-
性能:域控制器芯片需要具备足够的计算能力,以处理来自各种传感器的数据并实时做出决策。这通常需要高性能的CPU、GPU和AI加速器。
-
功耗:由于汽车的能源有限,域控制器芯片需要在保证性能的同时具备低功耗特性。
-
安全性:汽车领域对安全性要求极高,因此芯片需要具备严格的安全功能,如ISO 26262功能安全认证、加密和防篡改等。
-
可靠性:汽车工作环境恶劣,芯片需要具备高可靠性,能在高温、低温、湿度、振动等恶劣环境下稳定工作。
-
系统集成:域控制器需要与多种传感器、执行器和其他ECU进行通信,因此芯片需要支持多种通信接口,如CAN、LIN、FlexRay、Ethernet等。
-
软件兼容性:为了降低开发成本和时间,芯片需要支持主流的汽车软件平台,如AUTOSAR、ROS等。
-
供应商支持:选择有经验且可靠的芯片供应商,可以确保产品质量和技术支持。
目前市场上有一些知名的智能驾驶域控制器芯片供应商,如NVIDIA(Drive AGX系列)、英特尔(Mobileye EyeQ系列)、恩智浦(S32系列)等。在选择芯片时,需要根据具体的应用场景和性能需求进行权衡。
-
成本:在满足性能、安全性、可靠性等要求的前提下,成本也是一个重要的考虑因素。选择具有性价比的芯片可以降低整车成本,提高市场竞争力。
-
扩展性:随着智能驾驶技术的不断发展,未来可能需要支持更多的功能和应用。因此,在选择芯片时,需要考虑其扩展性,以便在未来可以方便地升级和扩展功能。
-
生态系统:一个健全的生态系统可以为开发者提供丰富的资源和支持,降低开发难度和成本。在选择芯片时,可以考虑其生态系统的完善程度,如是否有丰富的开发工具、文档、案例等。
-
更新周期:汽车行业的产品更新周期较长,因此在选择芯片时,需要考虑其更新周期,确保在产品整个生命周期内都能获得稳定的供应和支持。
-
供应商实力:在选择芯片时,需要考虑供应商的实力,包括技术实力、市场份额、客户口碑等。选择有实力的供应商可以确保产品质量和技术支持,降低项目风险。
-
技术支持:良好的技术支持可以帮助开发者快速解决技术问题,提高开发效率。在选择芯片时,需要了解供应商的技术支持能力,如是否有专业的技术团队、是否提供在线支持等。
-
定制化能力:不同的智能驾驶域控制器可能有不同的功能需求,因此在选择芯片时,需要考虑供应商的定制化能力,以满足特定的功能和性能要求。
-
供应链稳定性:汽车行业对供应链稳定性要求较高,因此在选择芯片时,需要考虑供应商的供应链稳定性,确保在整个项目周期内都能保证稳定的芯片供应。
-
芯片封装和尺寸:根据智能驾驶域控制器的设计要求,需要考虑芯片的封装和尺寸,以满足空间布局和散热等方面的需求。
-
芯片的兼容性:在选择芯片时,需要考虑其与其他硬件和软件的兼容性,以便在整个系统中实现无缝集成。
-
芯片的认证和合规性:汽车行业对产品的安全性和合规性要求较高,因此在选择芯片时,需要考虑其是否通过了相关认证,如ISO 26262、AEC-Q100等。
-
芯片的能耗:智能驾驶域控制器的能耗直接影响整车的续航里程,因此在选择芯片时,需要考虑其能耗,尽量选择低功耗的产品。
-
芯片的可扩展性:在选择芯片时,需要考虑其可扩展性,以便在未来升级或扩展功能时能够更加方便地进行硬件和软件的更新。
-
芯片的成本效益:在选择芯片时,需要权衡其性能和成本,选择性价比较高的产品,以降低整个项目的成本。
-
芯片的生命周期:汽车行业的产品生命周期较长,因此在选择芯片时,需要考虑其生命周期,确保在整个项目周期内能够获得稳定的供应和支持。
-
芯片的可靠性和稳定性:在选择芯片时,需要考虑其可靠性和稳定性,以确保在恶劣的工作环境下仍能保持良好的性能。
-
芯片的安全性:智能驾驶域控制器涉及到车辆的安全,因此在选择芯片时,需要考虑其安全性,如抗干扰能力、数据加密等方面的性能。
-
芯片的生态系统:在选择芯片时,需要考虑其生态系统,如是否有丰富的开发工具、技术支持和合作伙伴等,以便更好地进行项目的开发和实施。
-
芯片的市场份额和口碑:在选择芯片时,可以参考市场份额和口碑,选择在行业内具有较高评价和市场认可度的产品。
-
芯片的技术支持:在选择芯片时,需要考虑供应商是否能提供及时、专业的技术支持,以便在项目开发过程中解决技术问题。
-
芯片的更新换代速度:在选择芯片时,需要关注其更新换代速度,以便在项目周期内能够及时跟进技术发展趋势,保持竞争力。
-
芯片的产能和供应链稳定性:在选择芯片时,需要考虑其产能和供应链稳定性,确保在项目周期内能够获得稳定的供应,避免因供应问题导致的项目延误。
总之,在选择智能驾驶域控制器芯片时,需要从多个维度进行综合考虑,以确保选用的芯片能够满足项目的各项需求。同时,与供应商保持良好的沟通和合作关系,有助于确保项目的顺利进行。
相关文章:

ADAS自动驾驶
文章目录 ADAS技术现状ADAS功能的主流方案ADAS控制器开发自动驾驶技术现状自动驾驶域控制器开发智能驾驶域控制器芯片选择 ADAS技术现状 自动驾驶辅助系统(ADAS,Advanced Driver Assistance Systems)是一种用于提高驾驶安全和舒适性的技术&a…...
Python从零到一构建项目
随着互联网的发展,网络上的信息量急剧增长,而获取、整理和分析这些信息对于很多人来说是一项艰巨的任务。而Python作为一种功能强大的编程语言,它的爬虫能力使得我们能够自动化地从网页中获取数据,大大提高了效率。本文将分享如何…...

使用todesk或者向日葵远程Ubuntu22.04系统的客户机黑屏
[TOC](使用todesk或者向日葵远程Ubuntu22.04系统的客户机黑屏) 目录 1. 故障现象 2. 分析 3. 解决办法 4. 参考文章 1. 故障现象 使用todesk或者向日葵远程客户机(Ubuntu22.04系统)时,显示黑屏 2. 分析 本故障可能是因为Ubuntu22.04的图…...
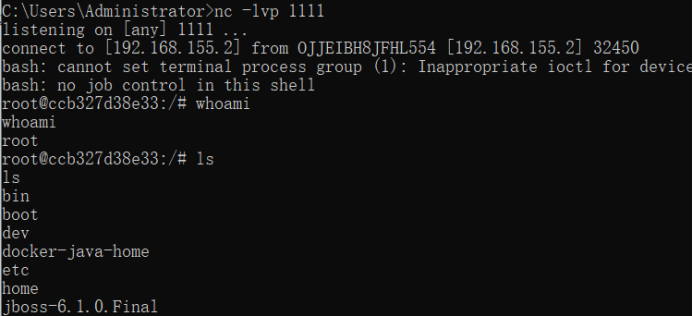
JBoss JMXInvokerServlet 反序列化漏洞复现(CVE-2015-7501)
一、漏洞说明 JBoss中/invoker/JMXInvokerServlet路径对外开放,JBoss的jmx组件支持反序列化。JBoss在/invoker/JMXInvokerServlet请求中读取了用户传入的对象,然后我们利用Apache Commons Collections中的Gadget执行任意代码。 二、影响版本 JBoss Enter…...

比Mojo慢68000倍,Python性能差的锅该给GIL吗?
# 关注并星标腾讯云开发者 # 每周1 | 鹅厂工程师带你审判技术 # 第3期 | 李志瑞:天使还是魔鬼?聊聊 Python GIL 9 月 7 日,新兴编程语言 Mojo 正式发布。Mojo 的最初设计目标是比 Python 快 35000 倍,近期该团队表示,因…...
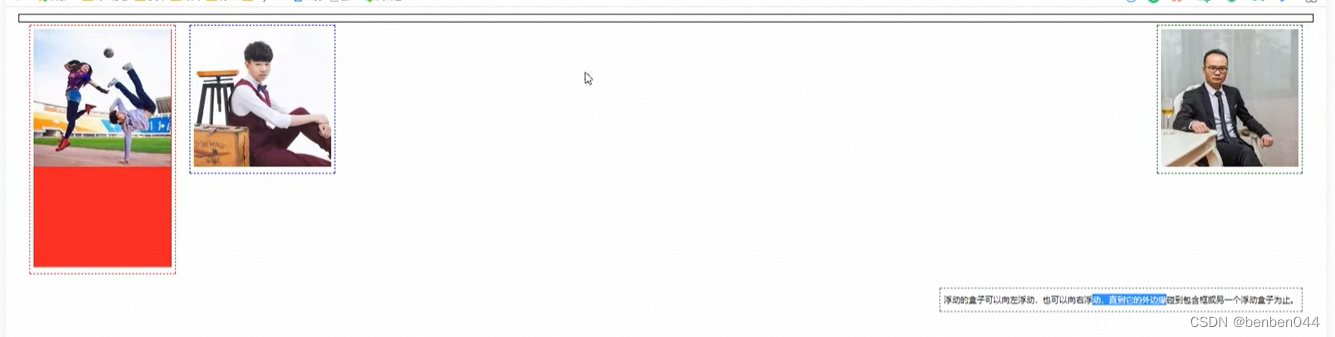
CSS读书笔记
——————————————精华部分—————————————— 1、选择器 (1)基本选择器: 标签选择器 body{} 类选择器 class .class名称{} ID选择器 id #id名称{} 优先级:ID选择器 > 类选择器 > 标签选择器 &am…...
连接提示仍在使用解决方案)
Qt使用QSqlDatabase remoeDatabase()连接提示仍在使用解决方案
问题描述 调用QSqlDatabase的removeDatabase函数的时候,出现了如下错误 QSqlDatabasePrivate::removeDatabase: connection 05465461654654 is still in use, all queries will cease to work官方示例 [static] void QSqlDatabase::removeDatabase(const QString &…...
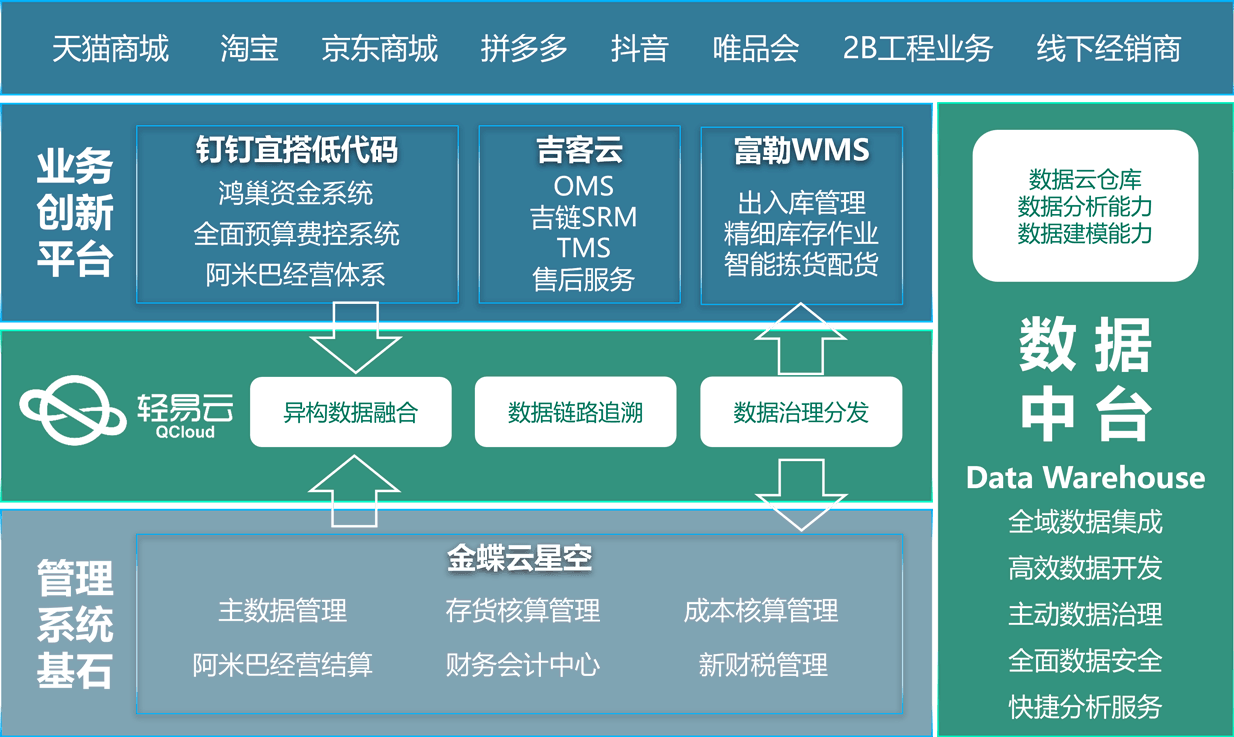
管易云与金蝶云星空对接集成仓库查询打通仓库新增
管易云与金蝶云星空对接集成仓库查询打通仓库新增 接通系统:管易云 管易云是金蝶旗下专注提供电商企业管理软件服务的子品牌,先后开发了C-ERP、EC-OMS、EC-WMS、E店管家、BBC、B2B、B2C商城网站建设等产品和服务,涵盖电商业务全流程。 对接目…...

ubuntu 安装 Mongodb 4.0、4.2、4.4
1. 安装 # 配置apt Repository mongodb 4.0, 4.2, 4.4 $ sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv 68818c72e52529d4 #4.0 $ sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv 4B7C549A058F8B6B #4.2 $ …...
详解Hugging Face Transformers的TrainingArguments
前言: TrainingArguments是Hugging Face Transformers库中用于训练模型时需要用到的一组参数,用于控制训练的流程和效果。 使用示例: from transformers import Trainer,TrainingArguments training_args TrainingArguments(output_dir&q…...
【LeetCode-中等题】17. 电话号码的字母组合
文章目录 题目方法一:递归回溯 题目 方法一:递归回溯 参考讲解:还得用回溯算法!| LeetCode:17.电话号码的字母组合 首先可以画出树图: 先将数字对应的字符集合 加入到一个map集合 这里需要一个index来控…...
读高性能MySQL(第4版)笔记06_优化数据类型(上)
1. 良好的逻辑设计和物理设计是高性能的基石 1.1. 反范式的schema可以加速某些类型的查询,但同时可能减慢其他类型的查询 1.2. 添加计数器和汇总表是一个优化查询的好方法,但它们的维护成本可能很 1.3. 将修改schema作为一个常见事件来规划 2. 让事情…...

mac如何创建mysql数据库
使用mac创建mysql数据库十分简单,我们只需要按照以下步骤即可完成。 首先,我们需要安装mysql,我们可以通过官网下载对应的安装包,或者通过Homebrew进行安装。 接下来,我们需要启动mysql服务,在终端中输入以…...

Ceph入门到精通-centos8 install brctl
在centos7上是可以直接yum安装bridge-utils的,但是centos8不行 经过分析 brctl有提供centos的rpm包,里面只有一个二进制脚本,所以直接下载安装即可 rpm -ivh http://mirror.centos.org/centos/7/os/x86_64/Packages/bridge-utils-1.5-9.el7…...
sqli第一关
1.在下使用火狐访问sqlilabs靶场并使用burpsuite代理火狐。左为sqlilabs第一关,右为burpsuite。 2.输入?id1 and 11 与?id1 and 12试试 可以看出没有变化哈,明显我们输入的语句被过滤了。在?id1后面尝试各种字符,发现单引号 包…...

入行IC | 新人入行IC选择哪个岗位更好?
很多同学入行不知道怎么选择岗位。IC的岗位一般有设计、验证、后端、封装、测试、FPGA等等。但是具体到每个人身上,就要在开始的时候确定下你要找的职位,可以有两个或三个,但是要分出主次,主次不分会让你纠结整个找工作的过程。 …...

时间旅行的Bug 奇怪的输入Bug
故事一:时间旅行的Bug 在一个普通的工作日,程序员小明正在开发一个时间旅行的应用程序。这个应用程序可以让用户选择一个特定的日期和时间,然后将用户的意识传送到过去或未来的那个时刻。小明对这个项目非常兴奋,他认为这将是一个…...
解决nbsp;不生效的问题
代码块 {{title}} title:附 \xa0\xa0\xa0件,//或者 <span v-html"title"></span> title:附 件:,效果图...

【Lidar】Cloud Compare介绍安装包
CloudCompare是一款基于GPL开源协议的3D点云处理软件,最初被设计用来对稠密的三维点云进行直接比较。它依赖于一种特定的八叉树结构,在进行点云对比这类任务时具有出色的性能。在2005年后,CloudCompare实现了点云和三角形网格之间的比较。 Cl…...

Java中的Maven是什么?
Maven是一个开源的项目管理和构建工具,用于Java项目的构建、依赖管理和项目信息管理。它提供了一种标准的项目结构、规范的构建过程和丰富的插件生态系统,简化了项目的管理和构建过程。 Maven基于项目对象模型(Project Object Model…...

基于Uniapp开发HarmonyOS 5.0旅游应用技术实践
一、技术选型背景 1.跨平台优势 Uniapp采用Vue.js框架,支持"一次开发,多端部署",可同步生成HarmonyOS、iOS、Android等多平台应用。 2.鸿蒙特性融合 HarmonyOS 5.0的分布式能力与原子化服务,为旅游应用带来…...
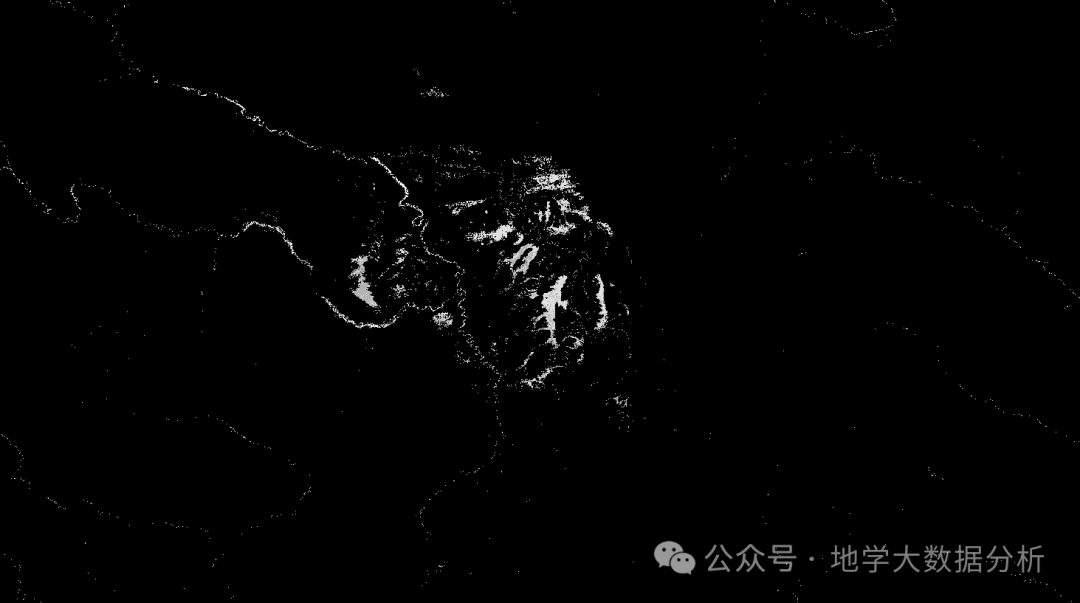
全球首个30米分辨率湿地数据集(2000—2022)
数据简介 今天我们分享的数据是全球30米分辨率湿地数据集,包含8种湿地亚类,该数据以0.5X0.5的瓦片存储,我们整理了所有属于中国的瓦片名称与其对应省份,方便大家研究使用。 该数据集作为全球首个30米分辨率、覆盖2000–2022年时间…...
屋顶变身“发电站” ,中天合创屋面分布式光伏发电项目顺利并网!
5月28日,中天合创屋面分布式光伏发电项目顺利并网发电,该项目位于内蒙古自治区鄂尔多斯市乌审旗,项目利用中天合创聚乙烯、聚丙烯仓库屋面作为场地建设光伏电站,总装机容量为9.96MWp。 项目投运后,每年可节约标煤3670…...

QT: `long long` 类型转换为 `QString` 2025.6.5
在 Qt 中,将 long long 类型转换为 QString 可以通过以下两种常用方法实现: 方法 1:使用 QString::number() 直接调用 QString 的静态方法 number(),将数值转换为字符串: long long value 1234567890123456789LL; …...
)
是否存在路径(FIFOBB算法)
题目描述 一个具有 n 个顶点e条边的无向图,该图顶点的编号依次为0到n-1且不存在顶点与自身相连的边。请使用FIFOBB算法编写程序,确定是否存在从顶点 source到顶点 destination的路径。 输入 第一行两个整数,分别表示n 和 e 的值(1…...

Linux C语言网络编程详细入门教程:如何一步步实现TCP服务端与客户端通信
文章目录 Linux C语言网络编程详细入门教程:如何一步步实现TCP服务端与客户端通信前言一、网络通信基础概念二、服务端与客户端的完整流程图解三、每一步的详细讲解和代码示例1. 创建Socket(服务端和客户端都要)2. 绑定本地地址和端口&#x…...
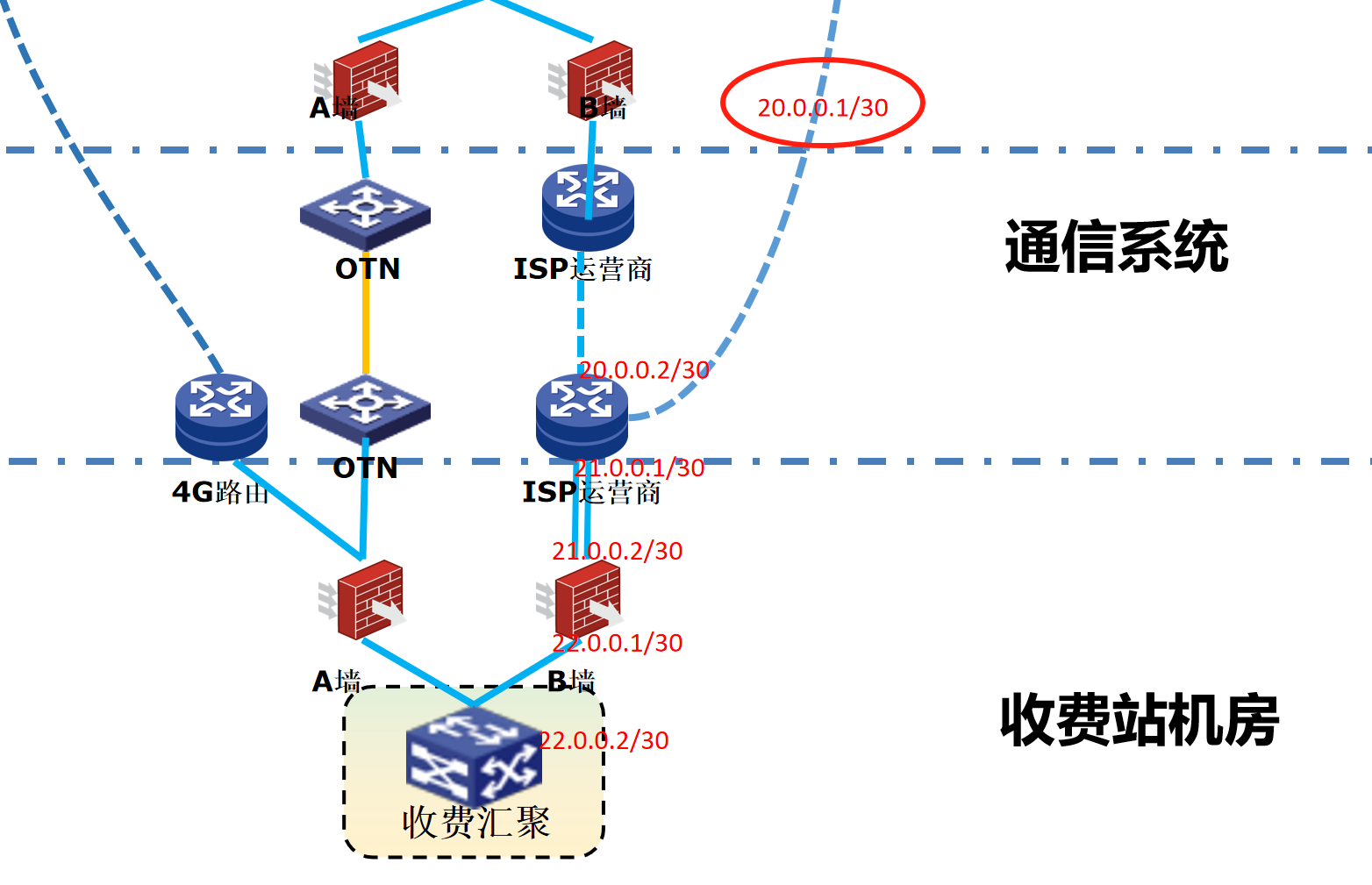
浪潮交换机配置track检测实现高速公路收费网络主备切换NQA
浪潮交换机track配置 项目背景高速网络拓扑网络情况分析通信线路收费网络路由 收费汇聚交换机相应配置收费汇聚track配置 项目背景 在实施省内一条高速公路时遇到的需求,本次涉及的主要是收费汇聚交换机的配置,浪潮网络设备在高速项目很少,通…...

PAN/FPN
import torch import torch.nn as nn import torch.nn.functional as F import mathclass LowResQueryHighResKVAttention(nn.Module):"""方案 1: 低分辨率特征 (Query) 查询高分辨率特征 (Key, Value).输出分辨率与低分辨率输入相同。"""def __…...
)
C#学习第29天:表达式树(Expression Trees)
目录 什么是表达式树? 核心概念 1.表达式树的构建 2. 表达式树与Lambda表达式 3.解析和访问表达式树 4.动态条件查询 表达式树的优势 1.动态构建查询 2.LINQ 提供程序支持: 3.性能优化 4.元数据处理 5.代码转换和重写 适用场景 代码复杂性…...
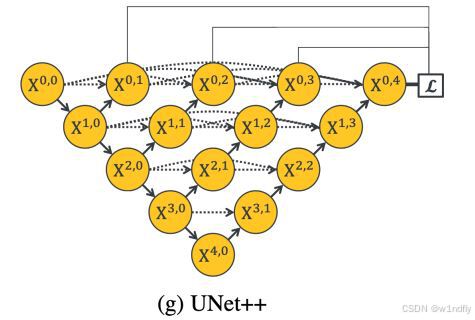
nnUNet V2修改网络——暴力替换网络为UNet++
更换前,要用nnUNet V2跑通所用数据集,证明nnUNet V2、数据集、运行环境等没有问题 阅读nnU-Net V2 的 U-Net结构,初步了解要修改的网络,知己知彼,修改起来才能游刃有余。 U-Net存在两个局限,一是网络的最佳深度因应用场景而异,这取决于任务的难度和可用于训练的标注数…...