【AI】机器学习——感知机
文章目录
- 4.1 感知机基本概念
- 4.2 策略
- 4.2.1 数据集的线性可分性
- 4.2.2 学习策略
- 目标
- 损失函数的构造
- 关于距离的解释
- 4.3 算法
- 4.3.1 原始形式
- 损失函数的梯度下降法
- 4.3.2 PLA例题
- 4.3.3 算法收敛性
- 4.4 PLA对偶形式
- 4.4.1 原始PLA分析
- 4.4.2 PLA对偶形式
- 4.4.3 优点
4.1 感知机基本概念
解决二分类问题,属于 线性分类模型——判别模型
目标:求出将训练数据进行线性划分的分离超平面
基本思想:导入五分类的损失函数,利用梯度下降法对损失i函数极小化,求得感知机模型
输入: x ∈ X ⊆ R n x\in \mathcal{X}\subseteq R^n x∈X⊆Rn 表示实例的特征向量, y ∈ Y = { + 1 , − 1 } y\in \mathcal{Y}=\{+1, -1\} y∈Y={+1,−1}
输出: ω ^ , b ^ \hat{\omega},\hat{b} ω^,b^
模型——决策函数
f ( x ) = s i g n ( ω T x + b ) = { + 1 , ω T x > 0 − 1 , ω T x < 0 f(x)=sign(\omega^Tx+b)=\begin{cases} +1&,\omega^Tx> 0\\ -1&,\omega^Tx<0 \end{cases} f(x)=sign(ωTx+b)={+1−1,ωTx>0,ωTx<0
假设空间:定义在特征空间中的所有线性分类模型
{ f ∣ f ( x ) = ω T x + b } \{f\vert f(x)=\omega^Tx+b\} {f∣f(x)=ωTx+b}
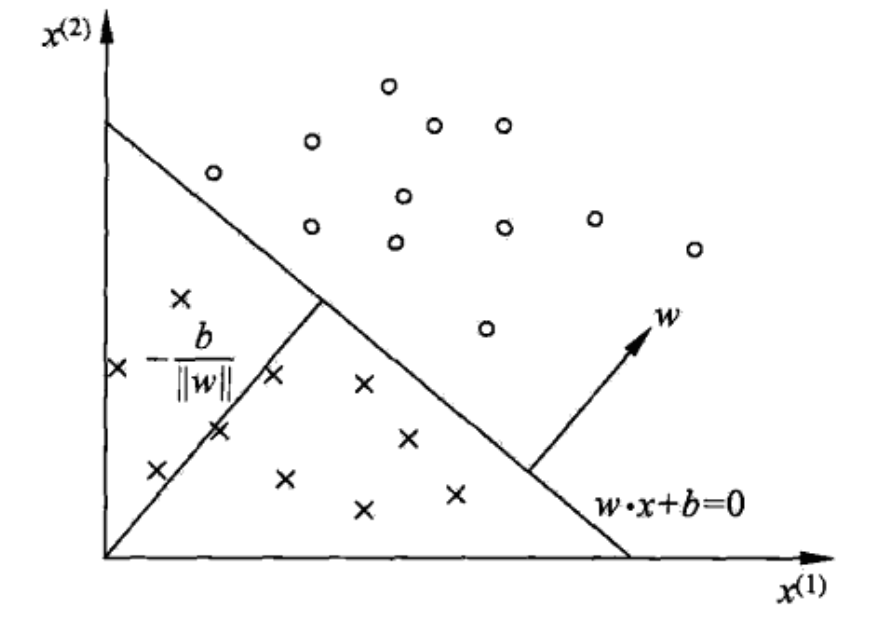
几何理解: ω T x + b = 0 \omega^Tx+b=0 ωTx+b=0 在空间中为一个超平面 S S S , ω \omega ω 为法向量, b b b 为截距
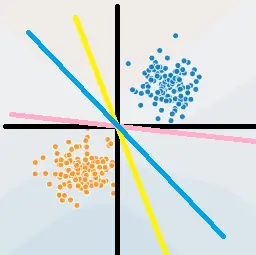
- 上图中超平面 S : ω 1 x ( 1 ) + ω 2 x ( 2 ) + b = 0 S:\omega_1x^{(1)}+\omega_2x^{(2)}+b=0 S:ω1x(1)+ω2x(2)+b=0 ,这个超平面将特征空间分为 + 1 , − 1 +1,-1 +1,−1 类
4.2 策略
损失函数的定义,并将 J ( ω ) J(\omega) J(ω) 最小化
4.2.1 数据集的线性可分性
对于数据集
D = { ( x 1 , y 1 ) , ( x 2 , y 2 ) , ⋯ , ( x N , y N ) } x i ∈ X ⊆ R n , y i ∈ Y = { + 1 , − 1 } , i = 1 , 2 , ⋯ , N D=\{(x_1,y_1),(x_2,y_2),\cdots,(x_N,y_N)\}\\ x_i\in \mathcal{X}\subseteq R^n,y_i\in\mathcal{Y}=\{+1,-1\},i=1,2,\cdots,N D={(x1,y1),(x2,y2),⋯,(xN,yN)}xi∈X⊆Rn,yi∈Y={+1,−1},i=1,2,⋯,N
若存在某个超平面 S S S : ω T x + b = 0 \omega^Tx+b=0 ωTx+b=0 ,将数据正负两类完全划分到超平面两侧
- 对于正例: y i = + 1 y_i=+1 yi=+1 ,有 ω T x + b > 0 \omega^Tx+b>0 ωTx+b>0
- 对于负例: y i = − 1 y_i=-1 yi=−1 ,有 ω T x + b < 0 \omega^Tx+b<0 ωTx+b<0
4.2.2 学习策略
目标
假设数据集D线性可分,找到将数据集D正负两例完全正确分开的超平面S,即确定参数 ω ^ , b ^ \hat{\omega},\hat{b} ω^,b^
损失函数的构造
可选择
- 误分类点的总数,但不关于 ω , b \omega,b ω,b 可导,是离散的
- 误分类点到超平面 S S S 的距离和
点 x i x_i xi 到平面 S S S 的总距离
ω T x i + b ∥ ω ∥ 2 \frac{\omega^Tx_i+b}{\Vert \omega\Vert_2} ∥ω∥2ωTxi+b
对于误分类点有 y i ⋅ ( ω T x i + b ) < 0 ⟺ − y i ⋅ ( ω T x i + b ) > 0 y_i\cdot(\omega^Tx_i+b)<0\iff -y_i\cdot(\omega^Tx_i+b)>0 yi⋅(ωTxi+b)<0⟺−yi⋅(ωTxi+b)>0
对于误分类点,到超平面的几何距离为
− 1 ∥ ω ∥ 2 y i ⋅ ( ω T x i + b ) -\frac{1}{\Vert \omega\Vert_2}y_i\cdot(\omega^Tx_i+b) −∥ω∥21yi⋅(ωTxi+b)
若所有误分类点集合为 M M M ,则误分类点到 S S S 的距离和为
− 1 ∥ ω ∥ 2 ∑ x i ∈ M y i ⋅ ( ω T x i + b ) -\frac{1}{\Vert \omega\Vert_2}\sum\limits_{x_i\in M}y_i\cdot(\omega^Tx_i+b) −∥ω∥21xi∈M∑yi⋅(ωTxi+b)
故将感知机(损失函数)定义为经验风险函数
R e m p ( f ) = L ( ω , b ) = − ∑ x i ∈ M y i ⋅ ( ω T x i + b ) R_{emp}(f)=L(\omega,b)=-\sum\limits_{x_i\in M}y_i\cdot(\omega^Tx_i+b) Remp(f)=L(ω,b)=−xi∈M∑yi⋅(ωTxi+b)
策略为 在假设空间中选取使损失函数 L ( ω , b ) L(\omega,b) L(ω,b) 最小的模型参数 ω , b \omega,b ω,b
- 损失函数非负
- 误分类点数量越少越好
- 误分类点离超平面越近越好
- L ( ω , b ) L(\omega,b) L(ω,b) 是连续可导的
关于距离的解释
− 1 ∥ ω ∥ 2 y i ⋅ ( ω T x i + b ) -\frac{1}{\Vert \omega\Vert_2}y_i\cdot(\omega^Tx_i+b) −∥ω∥21yi⋅(ωTxi+b) 为几何距离
− y i ⋅ ( ω T x i + b ) -y_i\cdot(\omega^Tx_i+b) −yi⋅(ωTxi+b) 为函数距离
几何距离的系数 1 ∥ ω ∥ 2 \frac{1}{\Vert \omega\Vert_2} ∥ω∥21 可以抵消系数同时放大的影响,如 a X + b Y + c = 0 aX+bY+c=0 aX+bY+c=0 与 2 a X + 2 b Y + 2 c = 0 2aX+2bY+2c=0 2aX+2bY+2c=0
- 但会增加梯度下降法计算的复杂度
PLA的目标是使误分类点个数最小, 1 ∥ ω ∥ 2 \frac{1}{\Vert \omega\Vert_2} ∥ω∥21 对分类结果无影响
选取不同的初始 ω , b \omega,b ω,b ,最终会迭代出不同的超平面
4.3 算法
用随机梯度下降法,求解损失函数最优化问题
4.3.1 原始形式
输入:训练数据集
D = { ( x 1 , y 1 ) , ( x 2 , y 2 ) , ⋯ , ( x N , y N ) } , x i ∈ X ⊆ R n , y i ∈ Y = { + 1 , − 1 } , i = 1 , 2 , ⋯ , N D=\{(x_1,y_1),(x_2,y_2),\cdots,(x_N,y_N)\},\\ x_i\in \mathcal{X}\subseteq R^n,y_i\in \mathcal{Y}=\{+1,-1\},i=1,2,\cdots,N D={(x1,y1),(x2,y2),⋯,(xN,yN)},xi∈X⊆Rn,yi∈Y={+1,−1},i=1,2,⋯,N
输出: ω ^ , b ^ \hat{\omega},\hat{b} ω^,b^
模型
f ( x ) = s i g n ( ω T x + b ) = { + 1 , ω T x + b > 0 − 1 , ω T x + b < 0 f(x)=sign(\omega^Tx+b)=\begin{cases} +1&,\omega^Tx+b>0\\ -1&,\omega^Tx+b<0\\ \end{cases} f(x)=sign(ωTx+b)={+1−1,ωTx+b>0,ωTx+b<0
策略
a r g min ω , b L ( ω , b ) = − ∑ x i ∈ M y i ⋅ ( ω T x i + b ) arg\min\limits_{\omega,b}L(\omega,b)=-\sum\limits_{x_i\in M}y_i\cdot(\omega^Tx_i+b) argω,bminL(ω,b)=−xi∈M∑yi⋅(ωTxi+b)
步骤
-
选取随机的 ω 0 , b 0 \omega_0,b_0 ω0,b0
-
在训练集中选数据 ( x i , y i ) (x_i,y_i) (xi,yi) ,将误分类点作为训练数据,即满足 ω T x i + b < 0 \omega^Tx_i+b<0 ωTxi+b<0 的条件的点
ω [ t + 1 ] ← ω [ t ] − η ∂ L ∂ ω = ω [ t ] + η y i x i b [ t + 1 ] ← b [ t ] − η ∂ L ∂ b = b [ t ] + η y i \omega^{[t+1]}\leftarrow\omega^{[t]}-\eta\frac{\partial L}{\partial \omega}=\omega^{[t]}+\eta y_ix_i\\ b^{[t+1]}\leftarrow b^{[t]}-\eta\frac{\partial L}{\partial b}=b^{[t]}+\eta y_i ω[t+1]←ω[t]−η∂ω∂L=ω[t]+ηyixib[t+1]←b[t]−η∂b∂L=b[t]+ηyi -
转至 2 2 2 步,直至 D D D 中无误分类点
损失函数的梯度下降法
{ ▽ ω L ( ω , b ) = − ∑ x i ∈ M y i x i ▽ b L ( ω , b ) = − ∑ x i ∈ M y i \begin{cases} \bigtriangledown_{\omega}L(\omega,b)=-\sum\limits_{x_i\in M}y_ix_i\\ \bigtriangledown_{b}L(\omega,b)=-\sum\limits_{x_i\in M}y_i\\ \end{cases} ⎩ ⎨ ⎧▽ωL(ω,b)=−xi∈M∑yixi▽bL(ω,b)=−xi∈M∑yi
前提是误分类点集合是固定的 ,才可进行梯度下降法最优化
{ ω ← ω − η ▽ ω L b ← b − η ▽ b L \begin{cases} \omega\leftarrow \omega-\eta\bigtriangledown_{\omega}L\\ b\leftarrow b-\eta\bigtriangledown_{b}L \end{cases} {ω←ω−η▽ωLb←b−η▽bL
这种做法:
- 计算量大
- 且调整参数 ω , b \omega,b ω,b 后,误分类点集可能会发生变化,故用随机梯度下降法
直观理解
当一个样本点被误分类时,调整 ω , b \omega,b ω,b 的值,使超平面 S S S 向该误分类点的一侧移动,减少该误分类点与 S S S 的距离,直至超平面越过此点(分类正确)
4.3.2 PLA例题
x 1 = ( 3 , 3 ) T , y 1 = + 1 x 2 = ( 4 , 3 ) T , y 2 = + 1 x 3 = ( 1 , 1 ) T , y 3 = − 1 x_1=(3,3)^T,y_1=+1\\ x_2=(4,3)^T,y_2=+1\\ x_3=(1,1)^T,y_3=-1\\ x1=(3,3)T,y1=+1x2=(4,3)T,y2=+1x3=(1,1)T,y3=−1
模型:
f ( x ) = s i g n ( ω T x + b ) = { + 1 , ω T x + b > 0 − 1 , ω T x + b < 0 ω = ( ω 1 ω 2 ) f(x)=sign(\omega^Tx+b)=\begin{cases} +1&,\omega^Tx+b>0\\ -1&,\omega^Tx+b<0 \end{cases}\\ \omega=\left( \begin{aligned} \omega_1\\ \omega_2 \end{aligned} \right) f(x)=sign(ωTx+b)={+1−1,ωTx+b>0,ωTx+b<0ω=(ω1ω2)
PLA策略为
min ω , b L ( ω , b ) = − ∑ x i ∈ M y i ( ω T ⋅ x + b ) \min\limits_{\omega,b}L(\omega,b)=-\sum\limits_{x_i\in M}y_i(\omega^T\cdot x+b) ω,bminL(ω,b)=−xi∈M∑yi(ωT⋅x+b)
算法:
-
取初值, ω 0 = ( 0 0 ) \omega_0=\left(\begin{aligned}0\\0\end{aligned}\right) ω0=(00) , b 0 = 0 b_0=0 b0=0 , η = 1 \eta=1 η=1
-
对 x 1 = ( 3 , 3 ) T x_1=(3,3)^T x1=(3,3)T ,有 y 1 ( ω 1 [ 0 ] x 1 ( 1 ) + ω 2 [ 0 ] x 1 ( 2 ) + b [ 0 ] ) = 0 y_1(\omega_1^{[0]}x_1^{(1)}+\omega_2^{[0]}x_1^{(2)}+b^{[0]})=0 y1(ω1[0]x1(1)+ω2[0]x1(2)+b[0])=0
未分类正确,故更新
{ ω [ 1 ] ← ω [ 0 ] − η ∂ L ∂ ω = ω [ 0 ] + η y i x i = ( 0 0 ) + ( 3 3 ) = ( 3 3 ) b [ 1 ] ← b [ 0 ] − η ∂ L ∂ b = b [ 0 ] + η y i = 0 + 1 ⋅ 1 = 1 \begin{cases} \omega^{[1]}\leftarrow\omega^{[0]}-\eta\frac{\partial L}{\partial \omega}=\omega^{[0]}+\eta y_ix_i= \left( \begin{aligned} 0\\0 \end{aligned} \right)+\left( \begin{aligned} 3\\3 \end{aligned} \right)=\left( \begin{aligned} 3\\3 \end{aligned} \right)\\ b^{[1]}\leftarrow b^{[0]}-\eta\frac{\partial L}{\partial b}=b^{[0]}+\eta y_i=0+1\cdot 1=1 \end{cases} ⎩ ⎨ ⎧ω[1]←ω[0]−η∂ω∂L=ω[0]+ηyixi=(00)+(33)=(33)b[1]←b[0]−η∂b∂L=b[0]+ηyi=0+1⋅1=1
故有线性模型
ω 1 T ⋅ x + b 1 = 3 x ( 1 ) + 3 x ( 2 ) + 1 \omega_1^{T}\cdot x+b_1=3x^{(1)}+3x^{(2)}+1 ω1T⋅x+b1=3x(1)+3x(2)+1 -
对 x 2 = ( 4 , 3 ) T , ( ω 1 [ 1 ] x 2 + ω 2 [ 1 ] x 2 + b [ 1 ] ) y 2 > 0 x_2=(4,3)^T,(\omega_1^{[1]}x_2+\omega_2^{[1]}x_2+b^{[1]})y_2>0 x2=(4,3)T,(ω1[1]x2+ω2[1]x2+b[1])y2>0 ,正确分类
x 3 = ( 1 , 1 ) T , ( ω 1 [ 1 ] x 3 + ω 2 [ 1 ] x 3 + b [ 1 ] ) y 3 < 0 x_3=(1,1)^T,(\omega_1^{[1]}x_3+\omega_2^{[1]}x_3+b^{[1]})y_3<0 x3=(1,1)T,(ω1[1]x3+ω2[1]x3+b[1])y3<0 ,误分类。用 ( x 3 , y 3 ) (x_3,y_3) (x3,y3) 更新模型参数
{ ω [ 2 ] ← ω [ 1 ] − η ∂ L ∂ ω = ω [ 1 ] + η y 3 x 3 = ( 3 3 ) + ( − 1 ) ( 1 1 ) = ( 2 2 ) b [ 1 ] ← b [ 0 ] − η ∂ L ∂ b = b [ 0 ] + η y 3 = 1 + 1 ⋅ ( − 1 ) = 0 \begin{cases} \omega^{[2]}\leftarrow\omega^{[1]}-\eta\frac{\partial L}{\partial \omega}=\omega^{[1]}+\eta y_3x_3= \left( \begin{aligned} 3\\3 \end{aligned} \right)+(-1)\left( \begin{aligned} 1\\1 \end{aligned} \right)=\left( \begin{aligned} 2\\2 \end{aligned} \right)\\ b^{[1]}\leftarrow b^{[0]}-\eta\frac{\partial L}{\partial b}=b^{[0]}+\eta y_3=1+1\cdot (-1)=0 \end{cases} ⎩ ⎨ ⎧ω[2]←ω[1]−η∂ω∂L=ω[1]+ηy3x3=(33)+(−1)(11)=(22)b[1]←b[0]−η∂b∂L=b[0]+ηy3=1+1⋅(−1)=0
有线性模型
ω 1 [ 2 ] x 1 + ω 2 [ 2 ] x 2 = 0 ⟺ 2 x 1 + 2 x 2 = 0 ⟺ x 1 + x 2 = 0 \omega^{[2]}_1x_1+\omega^{[2]}_2x_2=0\iff 2x_1+2x_2=0\iff x_1+x_2=0 ω1[2]x1+ω2[2]x2=0⟺2x1+2x2=0⟺x1+x2=0 -
对 ( x 1 , y 1 ) , ( x 2 , y 2 ) , ( x 3 , y 3 ) (x_1,y_1),(x_2,y_2),(x_3,y_3) (x1,y1),(x2,y2),(x3,y3) 代入线性模型,反复迭代
直至无误分类样本点,有
ω [ 7 ] = ( 1 1 ) , b [ 7 ] = − 3 \omega^{[7]}=\left( \begin{aligned} 1\\1 \end{aligned} \right),b^{[7]}=-3 ω[7]=(11),b[7]=−3
超平面为 x ( 1 ) + x ( 2 ) − 3 = 0 x^{(1)}+x^{(2)}-3=0 x(1)+x(2)−3=0
4.3.3 算法收敛性
对于线性可分的训练数据集,经过有限次迭代(PLA可以在有限步终止) ,可以得到一个将训练数据集完全正确划分的超平面 S S S
定理
训练集 D = { ( x 1 , y 1 ) , ( x 2 , y 2 ) , ⋯ , ( x N , y N ) } D=\{(x_1,y_1),(x_2,y_2),\cdots,(x_N,y_N)\} D={(x1,y1),(x2,y2),⋯,(xN,yN)} ,对于二分类模型, x i ∈ X ⊆ R n x_i\in \mathcal{X}\subseteq R^n xi∈X⊆Rn , y i ∈ Y = { + 1 , − 1 } y_i\in \mathcal{Y}=\{+1,-1\} yi∈Y={+1,−1} , i = 1 , 2 , ⋯ , N ,i=1,2,\cdots,N ,i=1,2,⋯,N
-
一定存在 ∥ ω ^ ∗ ∥ = 1 \Vert \hat{\omega}_*\Vert=1 ∥ω^∗∥=1 的超平面 ω ^ ∗ x T = 0 \hat{\omega}_*x^T=0 ω^∗xT=0 ,将数据完全正确划分,且存在 γ > 0 \gamma >0 γ>0 ,使
y i ( ω ^ ∗ x T ) ≥ γ ω ^ = ( ω ∗ b ∗ ) , x = ( x 1 ) y_i(\hat{\omega}_*x^T)\ge \gamma\\ \hat{\omega}=\left(\begin{aligned} \omega_*\\ b_* \end{aligned} \right),x=\left( \begin{aligned} x\\1 \end{aligned} \right) yi(ω^∗xT)≥γω^=(ω∗b∗),x=(x1)
证:由于线性可分,则可找到一个超平面 S : ω ^ ∗ x T = 0 S:\hat{\omega}_*x^T=0 S:ω^∗xT=0 ,使所有数据 y i ( ω ^ ∗ x T ) > 0 y_i(\hat{\omega}_*x^T)>0 yi(ω^∗xT)>0 分类正确可取 γ = min i { y i ( ω ^ ∗ x T ) } \gamma=\min\limits_{i}\{y_i(\hat{\omega}_*x^T)\} γ=imin{yi(ω^∗xT)} ,距离超平面最近的点
-
令 R = max 1 ≤ i ≤ N ∥ x i ∥ 2 R=\max\limits_{1\le i\le N}\Vert x_i\Vert_2 R=1≤i≤Nmax∥xi∥2 ,样本特征值最大的二范数 ,则PLA在训练数据集上误分类次数 k k k 满足 K ≤ ( R γ ) 2 K\le \left(\frac{R}{\gamma}\right)^2 K≤(γR)2
即离超平面越近的点越难分
感知机存在许多解,依赖于初值的选择
- 即误分类点的选择次序会影响最终的结果
4.4 PLA对偶形式
4.4.1 原始PLA分析
在原始 PLA 算法中, ω 0 , b 0 = 0 \omega_0,b_0=0 ω0,b0=0 , L ( ω , b ) = − ∑ x i ∈ M y i ( ω T ⋅ x + b ) L(\omega,b)=-\sum\limits_{x_i\in M}y_i(\omega^T\cdot x+b) L(ω,b)=−xi∈M∑yi(ωT⋅x+b) ,采用随机梯度下降算法,取一个误分类点 ( x i , y i ) (x_i,y_i) (xi,yi) 作为学习数据, η ∈ ( 0 , 1 ] \eta\in(0,1] η∈(0,1] 为学习率
{ ω [ t + 1 ] ← ω [ t ] − η ∂ L ∂ ω = ω [ t ] + η y i x i b [ t + 1 ] ← b [ t ] − η ∂ L ∂ b = b [ t ] + η y i \begin{cases} \omega^{[t+1]}\leftarrow\omega^{[t]}-\eta\frac{\partial L}{\partial \omega}=\omega^{[t]}+\eta y_ix_i\\ b^{[t+1]}\leftarrow b^{[t]}-\eta\frac{\partial L}{\partial b}=b^{[t]}+\eta y_i \end{cases} {ω[t+1]←ω[t]−η∂ω∂L=ω[t]+ηyixib[t+1]←b[t]−η∂b∂L=b[t]+ηyi
可见
-
ω \omega ω 更新至于误分类点有关
某个点使用次数越多,距超平面越近,越难正确分类
-
假设 ( x i , y i ) (x_i,y_i) (xi,yi) 被误分类 n i n_i ni 次,则 ω \omega ω 在 ( x i , y i ) (x_i,y_i) (xi,yi) 上的累积量为
{ ω i ← n i η y i x i = α i y i x i b i ← n i η y i = α i y i \begin{cases} \omega_i\leftarrow n_i\eta y_ix_i=\alpha_iy_ix_i\\ b_i\leftarrow n_i\eta y_i=\alpha_iy_i \end{cases} {ωi←niηyixi=αiyixibi←niηyi=αiyi
且对于正确分类的点 n i = 0 n_i=0 ni=0 ,故原始PLA参数可表示为
{ ω ← ∑ j = 1 N n j η y j ⋅ x j b ← ∑ j = 1 N n j η y j \begin{cases} \omega\leftarrow \sum\limits_{j=1}^Nn_j\eta y_j\cdot x_j\\ b\leftarrow \sum\limits_{j=1}^N n_j\eta y_j \end{cases} ⎩ ⎨ ⎧ω←j=1∑Nnjηyj⋅xjb←j=1∑Nnjηyj
4.4.2 PLA对偶形式
输入: D = { ( x 1 , y 1 ) , ( x 2 , y 2 ) , ⋯ , ( x N , y N ) } , x i ∈ X ⊆ R n , y i ∈ Y = { + 1 , − 1 } , i = 1 , 2 , ⋯ , N D=\{(x_1,y_1),(x_2,y_2),\cdots,(x_N,y_N)\},x_i\in \mathcal{X}\subseteq R^n,y_i\in \mathcal{Y}=\{+1,-1\},i=1,2,\cdots,N D={(x1,y1),(x2,y2),⋯,(xN,yN)},xi∈X⊆Rn,yi∈Y={+1,−1},i=1,2,⋯,N
η ∈ ( 0 , 1 ] \eta\in (0,1] η∈(0,1]
模型
f ( x ) = s i g n [ ( ∑ j = 1 N n j η y j ⋅ x j ) T ⋅ x + ∑ j = 1 N n j η y j ] = s i g n [ ∑ j = 1 N α j y j ( x j ⋅ x ) T + b ] \begin{aligned} f(x)&=sign[(\sum\limits_{j=1}^Nn_j\eta y_j\cdot x_j)^T\cdot x+\sum\limits_{j=1}^N n_j\eta y_j]\\ &=sign[\sum\limits_{j=1}^N\alpha_j y_j(x_j\cdot x)^T+b] \end{aligned} f(x)=sign[(j=1∑Nnjηyj⋅xj)T⋅x+j=1∑Nnjηyj]=sign[j=1∑Nαjyj(xj⋅x)T+b]
输出 : α , b \alpha,b α,b α = ( α 1 α 2 ⋮ α N ) \alpha=\left(\begin{aligned}\alpha_1\\\alpha_2\\\vdots\\\alpha_N\end{aligned}\right) α= α1α2⋮αN , α i = n i η \alpha_i=n_i\eta αi=niη , n i n_i ni 为 ( x i , y i ) (x_i,y_i) (xi,yi) 被误分类的次数
步骤
-
∀ n i = 0 \forall n_i=0 ∀ni=0 ,即 α = 0 , b = 0 \alpha=0,b=0 α=0,b=0
-
选取 ( x i , y i ) (x_i,y_i) (xi,yi) ,若 y i [ ∑ j = 1 N n j η y j ( x j T ⋅ x ) + ∑ j = 1 N n j η y j ] ≤ 0 y_i[\sum\limits_{j=1}^Nn_j\eta y_j(x_j^T\cdot x)+\sum\limits_{j=1}^N n_j\eta y_j]\le 0 yi[j=1∑Nnjηyj(xjT⋅x)+j=1∑Nnjηyj]≤0 ,则令
n [ t + 1 ] ← n [ t ] + 1 α [ t + 1 ] ← α [ t ] + η b [ t + 1 ] ← b [ t ] + η y i n^{[t+1]}\leftarrow n^{[t]}+1\\ \alpha^{[t+1]}\leftarrow \alpha^{[t]}+\eta\\ b^{[t+1]}\leftarrow b^{[t]}+\eta y_i n[t+1]←n[t]+1α[t+1]←α[t]+ηb[t+1]←b[t]+ηyi -
转至 2. 2. 2. 直至没有误分类点
由于样本点只以内积形式出现,可计算 Gram矩阵
G = [ x i ⋅ x j ] N × N = [ ( x 1 , x 1 ) ( x 1 , x 2 ) ⋯ ( x 1 , x N ) ( x 2 , x 1 ) ( x 2 , x 2 ) ⋯ ( x 2 , x N ) ⋮ ⋮ ⋱ ⋮ ( x N , x 1 ) ( x N , x 2 ) ⋯ ( x N , x N ) ] G=[x_i\cdot x_j]_{N\times N}=\left[\begin{matrix} (x_1,x_1)&(x_1,x_2)&\cdots&(x_1,x_N)\\ (x_2,x_1)&(x_2,x_2)&\cdots&(x_2,x_N)\\ \vdots&\vdots&\ddots&\vdots\\ (x_N,x_1)&(x_N,x_2)&\cdots&(x_N,x_N) \end{matrix} \right] G=[xi⋅xj]N×N= (x1,x1)(x2,x1)⋮(xN,x1)(x1,x2)(x2,x2)⋮(xN,x2)⋯⋯⋱⋯(x1,xN)(x2,xN)⋮(xN,xN)
4.4.3 优点
可预先计算存储 Gram 矩阵,提高计算速度
可通过 Gram 矩阵引入核函数,有 K ( x , z ) = ϕ ( x ) ⋅ ϕ ( z ) K(x,z)=\phi(x)\cdot \phi(z) K(x,z)=ϕ(x)⋅ϕ(z) ,可解决非线性分类问题
相关文章:
【AI】机器学习——感知机
文章目录 4.1 感知机基本概念4.2 策略4.2.1 数据集的线性可分性4.2.2 学习策略目标损失函数的构造关于距离的解释 4.3 算法4.3.1 原始形式损失函数的梯度下降法 4.3.2 PLA例题4.3.3 算法收敛性 4.4 PLA对偶形式4.4.1 原始PLA分析4.4.2 PLA对偶形式4.4.3 优点 4.1 感知机基本概念…...

蓝牙遥控器在T2-U上的应用
文章目录 简介优势使用流程示例代码遥控器命令表遥控器代码实现开启遥控器配对功能运行 简介 Tuya beacon 协议是基于 BLE 广播通信技术,完善配对解绑、组包拆包、群组管理、加密解密、安全策略,形成的一种轻量、安全的可接入涂鸦云的蓝牙协议。 蓝牙 …...

数据驱动的数字营销与消费者运营
引言:基于海洋馆文旅企业在推广宣传中,如何通过指标体系量化分析广告收益对业务带来的收益价值的思考? 第一部分:前链路引流投放的策略与实战 1.1 动态广告的实现: 偶然与必然 动态广告是一种基于实时数据和用户行为的广告形式,它…...
Qt点亮I.MX6U开发板的一个LED
本篇开始将会介绍与开发版相关的Qt项目,首先从点亮一个LED开始。I.MX6U和STM32MP157的相关信息都会用到,但是后期还是将I.MX6U的学习作为重点。当然其他开发版的开发也可以参考本博文。 文章目录 1. Qt是如何操控开发板上的一个LED2. 出厂内核设备树中注…...

网络摄像头-流媒体服务器-视频流客户端
取电脑的视频流 当涉及交通事件检测算法和摄像头视频数据处理时,涉及的代码案例可能会非常复杂,因为这涉及到多个组件和技术。以下是一个简单的Python代码示例,演示如何使用OpenCV库捕获摄像头视频流并进行实时车辆检测,这是一个…...
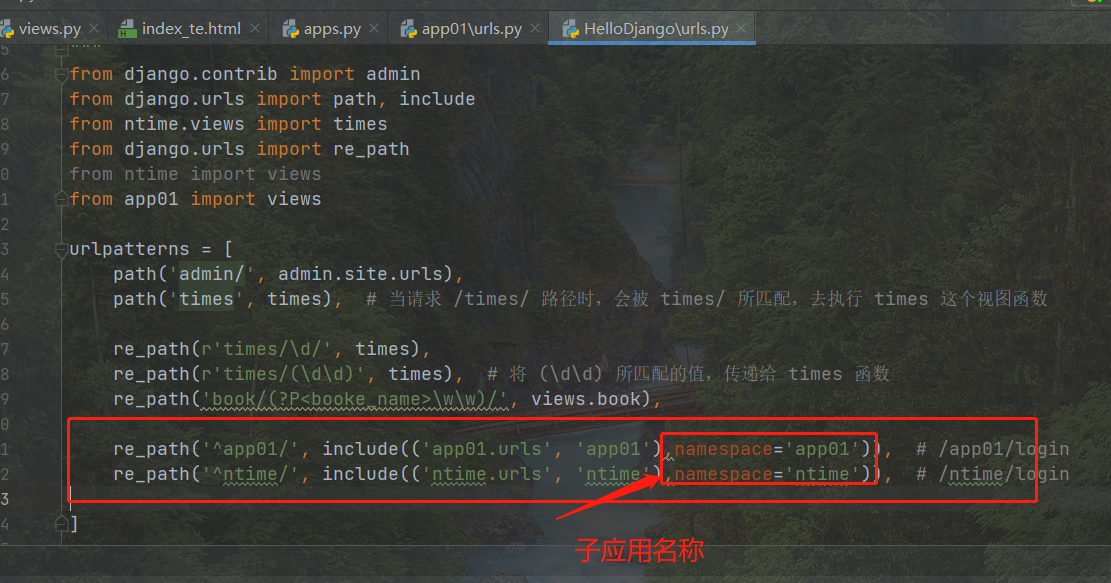
Django05_反向解析
Django05_反向解析 5.1 反向解析概述 随着功能的不断扩展,路由层的 url 发生变化,就需要去更改对应的视图层和模板层的 url,非常麻烦,不便维护。这个时候我们可以通过反向解析,将 url解析成对应的 试图函数 通过 path…...

基于HTML、CSS和JavaScript制作一个中秋节倒计时网页
💂 个人网站:【工具大全】【游戏大全】【神级源码资源网】🤟 前端学习课程:👉【28个案例趣学前端】【400个JS面试题】💅 寻找学习交流、摸鱼划水的小伙伴,请点击【摸鱼学习交流群】 这个项目使用HTML、CSS和…...
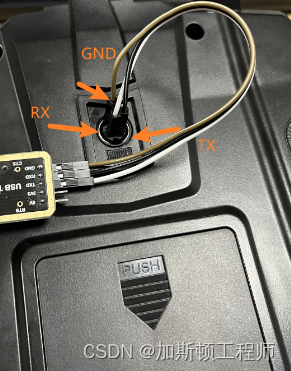
富斯I6刷10通道固件
使用USB转串口模块刷写10通道固件 一、下载固件 1. 十通道英文固件 下载地址: https://github.com/benb0jangles/FlySky-i6-Mod-/tree/master 选择 FlySky-i6-Mod–master \ 10ch Mod i6 Updater \ 10ch_MOD_i6_Programmer_V1 路径下的文件,亲测可用。 2. 原版六通道中…...

vector的模拟实现 总结
vector的模拟实现 总结 vector.hTest.cpp vector.h 1、迭代器的实现 #pragma oncenamespace JPC {template<class T>class vector{public://对于存储空间是连续的结构而言,可以用原身指针来 模拟实现 迭代器。typedef T* iterator;typedef const T* const_i…...

k8s中的有状态,无状态,pv、pvc等
数据库是一个典型的有状态服务,他的部署和无状态服务是不一样的。 PostgresSQL----基于Kubernetes部署PostgresSQL-CSDN博客 一、创建SC、PV和PVC存储对象 二、部署PostgresSQL Volume Kubernetes 中文指南——云原生应用架构实战手册 有状态应用: …...
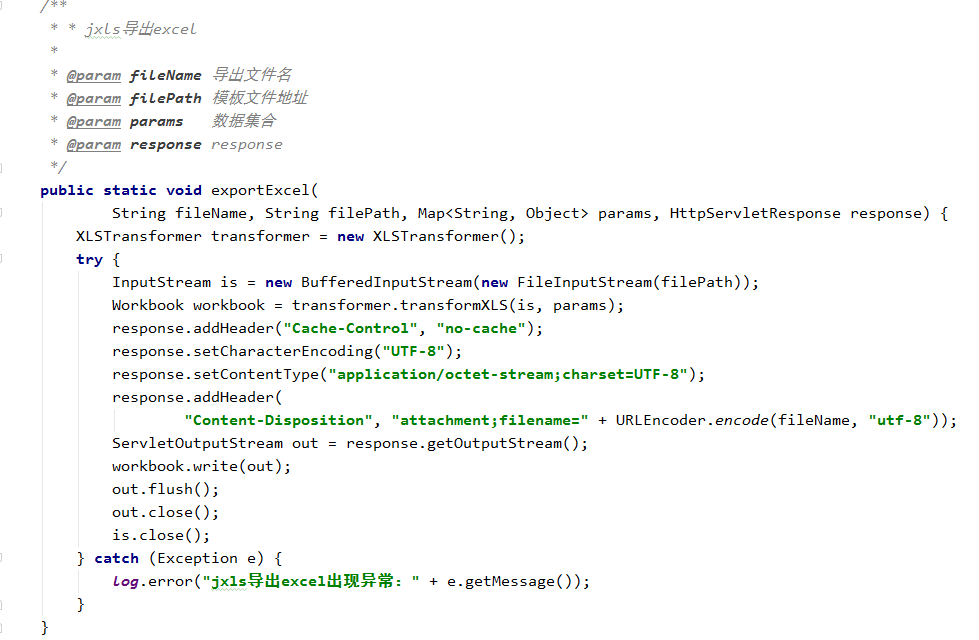
springboot+jxls复杂excel模板导出
JXLS 是基于 Jakarta POI API 的 Excel 报表生成工具,可以生成精美的 Excel 格式报表。它采用标签的方式,类似 JSP 标签,写一个 Excel 模板,然后生成报表,非常灵活,简单! Java 有一些用于创建 …...
用selenium webdriver获取网站cookie后,实现免登录上网站
以csdn为例,代码分为两部分。 一、csdn_get_cookies.py为半手动登录网站后获取cookies 二、csdn_use_cookies.py为使用获取到的cookies免登录上网站 #获取登录cookiesfrom selenium import webdriver import jsoncsdn_driver webdriver.Chrome() url "htt…...

如何使用Java进行安全测试?
要使用Java进行安全测试,可以按照以下步骤进行: 确定测试目标:首先,明确要测试的应用程序或系统的安全目标和需求。确定要测试的安全方面,如身份验证、授权、输入验证、安全配置等。 了解安全测试知识:熟悉…...
)
Linux之Socket函数(详细篇)
本篇是基于Linux man手册的一些总结 socket作用: create an endpoint for communication 函数结构 c #include <sys/types.h> /* See NOTES */ #include <sys/socket.h> int socket(int domain, int type, int protocol); 描述 socket() …...
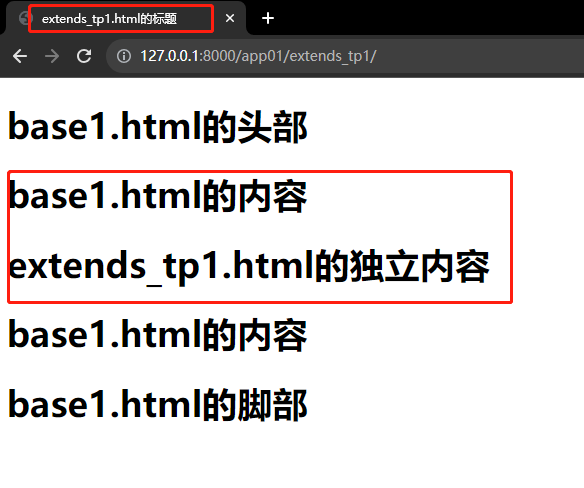
Dajngo06_Template模板
Dajngo06_Template模板 6.1 Template模板概述 模板引擎是一种可以让开发者把服务端数据填充到html网页中完成渲染效果的技术 静态网页:页面上的数据都是写死的,万年不变 动态网页:页面上的数据是从后端动态获取的(后端获取数据库…...
快速幂 c++
一般大家写都是 int ans 1; for (int i 1; i < a; i )ans * x;时间复杂度 但是这对于我们还不够,我们要 首先我们得知道一个数学知识 那么求 就有以下递归式 a 能被2整除 a 不能被2整除 (这里a/2是整除) 所以每次都调用 不就是么 最后补充一个东西…...

分享一个基于微信小程序的医院口腔助手小程序 牙科诊所预约小程序 源码 lw 调试
💕💕作者:计算机源码社 💕💕个人简介:本人七年开发经验,擅长Java、Python、PHP、.NET、微信小程序、爬虫、大数据等,大家有这一块的问题可以一起交流! 💕&…...
Si3262 一款低功耗刷卡+触摸+mcu 三合一SOC芯片
Si3262是-款高度集成的低功耗soC芯片,其集成了基于RISC-V 核的低功耗MCU和工作在13.56MHz的非接触式读写器模块。 该芯片ACD模式下刷卡距离可达4-5cm(天线决定),适用于智能门锁,电子锁,柜锁,桑拿…...
[H5动画制作系列] 奔跑的豹子的四种Demo演化
资源: bg.jpg: leopard.png: 背景透明 peopard2.png 背景不透明 参考代码1: leopard.js: (function(window) {ma function() {this.initialize();}ma._SpriteSheet new createjs.SpriteSheet({images: ["leopard.png"], frames: [[0,0,484,207],[486,0,484,207]…...

如何实现让一个函数能返回多个值的效果
在C语言中,一个函数通常只能返回一个值。但是可以通过指针参数或结构体来模拟返回多个值的效果。 使用指针参数:你可以将需要返回的值作为函数的参数,通过指针的形式传入,让函数将结果写入指针所指向的内存位置。 void multiple…...
)
进程地址空间(比特课总结)
一、进程地址空间 1. 环境变量 1 )⽤户级环境变量与系统级环境变量 全局属性:环境变量具有全局属性,会被⼦进程继承。例如当bash启动⼦进程时,环 境变量会⾃动传递给⼦进程。 本地变量限制:本地变量只在当前进程(ba…...
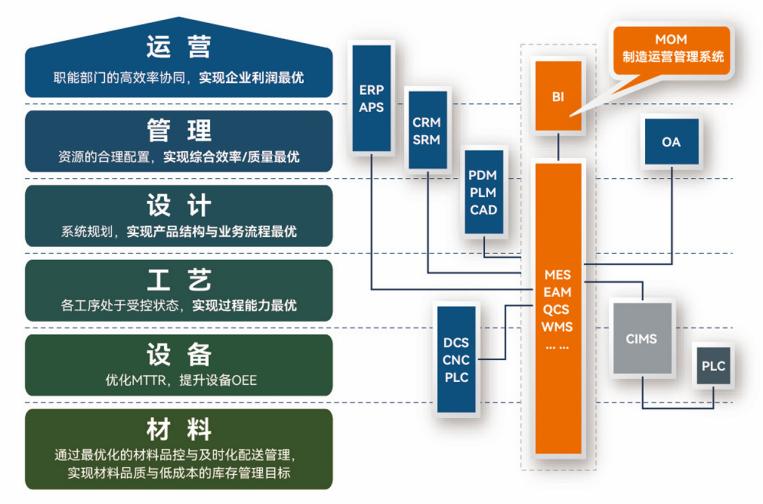
盘古信息PCB行业解决方案:以全域场景重构,激活智造新未来
一、破局:PCB行业的时代之问 在数字经济蓬勃发展的浪潮中,PCB(印制电路板)作为 “电子产品之母”,其重要性愈发凸显。随着 5G、人工智能等新兴技术的加速渗透,PCB行业面临着前所未有的挑战与机遇。产品迭代…...

k8s从入门到放弃之Ingress七层负载
k8s从入门到放弃之Ingress七层负载 在Kubernetes(简称K8s)中,Ingress是一个API对象,它允许你定义如何从集群外部访问集群内部的服务。Ingress可以提供负载均衡、SSL终结和基于名称的虚拟主机等功能。通过Ingress,你可…...

线程与协程
1. 线程与协程 1.1. “函数调用级别”的切换、上下文切换 1. 函数调用级别的切换 “函数调用级别的切换”是指:像函数调用/返回一样轻量地完成任务切换。 举例说明: 当你在程序中写一个函数调用: funcA() 然后 funcA 执行完后返回&…...
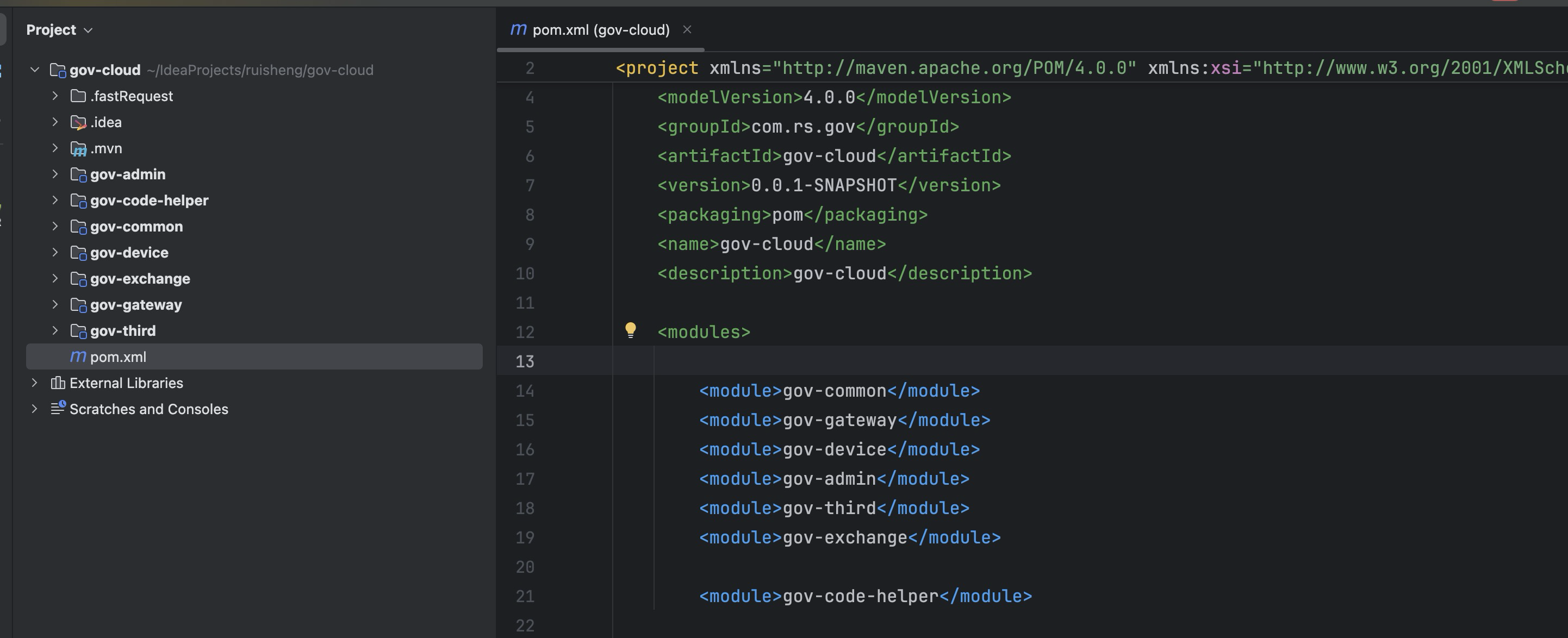
最新SpringBoot+SpringCloud+Nacos微服务框架分享
文章目录 前言一、服务规划二、架构核心1.cloud的pom2.gateway的异常handler3.gateway的filter4、admin的pom5、admin的登录核心 三、code-helper分享总结 前言 最近有个活蛮赶的,根据Excel列的需求预估的工时直接打骨折,不要问我为什么,主要…...

工业自动化时代的精准装配革新:迁移科技3D视觉系统如何重塑机器人定位装配
AI3D视觉的工业赋能者 迁移科技成立于2017年,作为行业领先的3D工业相机及视觉系统供应商,累计完成数亿元融资。其核心技术覆盖硬件设计、算法优化及软件集成,通过稳定、易用、高回报的AI3D视觉系统,为汽车、新能源、金属制造等行…...

什么?连接服务器也能可视化显示界面?:基于X11 Forwarding + CentOS + MobaXterm实战指南
文章目录 什么是X11?环境准备实战步骤1️⃣ 服务器端配置(CentOS)2️⃣ 客户端配置(MobaXterm)3️⃣ 验证X11 Forwarding4️⃣ 运行自定义GUI程序(Python示例)5️⃣ 成功效果
GruntJS-前端自动化任务运行器从入门到实战
Grunt 完全指南:从入门到实战 一、Grunt 是什么? Grunt是一个基于 Node.js 的前端自动化任务运行器,主要用于自动化执行项目开发中重复性高的任务,例如文件压缩、代码编译、语法检查、单元测试、文件合并等。通过配置简洁的任务…...

Qt的学习(一)
1.什么是Qt Qt特指用来进行桌面应用开发(电脑上写的程序)涉及到的一套技术Qt无法开发网页前端,也不能开发移动应用。 客户端开发的重要任务:编写和用户交互的界面。一般来说和用户交互的界面,有两种典型风格&…...

ThreadLocal 源码
ThreadLocal 源码 此类提供线程局部变量。这些变量不同于它们的普通对应物,因为每个访问一个线程局部变量的线程(通过其 get 或 set 方法)都有自己独立初始化的变量副本。ThreadLocal 实例通常是类中的私有静态字段,这些类希望将…...