[论文阅读笔记19]SiamMOT: Siamese Multi-Object Tracking
这是CVPR2021的一篇文章, 是利用SOT的一些思想来进行MOT的运动估计.
文章地址: 文章
代码地址: 代码
0. 摘要
本文提出了一个孪生(Siamese)式的MOT网络, 该网络用来估计帧间目标的运动. 为了探究运动估计对多目标跟踪的影响, 本文提出了两种运动建模方式: 显式和隐式. 本文在一些数据集上取得了良好的结果.
1. 整体思路
这篇文章是用SOT的思想做MOT的比较好的例子.
整个工作的具体思路是: 利用Siamese网络来更好地预测运动, 而不是Kalman滤波, 相当于用Siamese网络代替了Kalman.
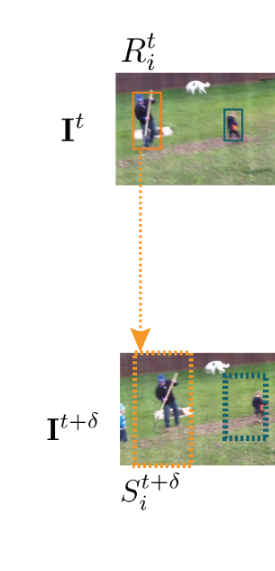
例如, 对于第ttt帧, 我们有第iii个目标的位置RitR_i^tRit, 然后我们扩张搜索区域, 在第t+δt + \deltat+δ帧将RitR_i^tRit的区域扩展, 初步决定搜索区域为Sit+1S_i^{t+1}Sit+1, 如下图橙色框所示. 我们的目的是用Siamese网络更好地从Sit+1S_i^{t+1}Sit+1中估计出目标在下一帧更精确的位置, 进而与检测更好地匹配.
为此, 我们提取RitR_i^tRit的特征fRitf_{R_i}^tfRit和Sit+1S_i^{t+1}Sit+1的特征fSit+δf_{S_i}^{t+\delta}fSit+δ, 输入至网络中, 输出缩小的可能的新区域R~it+δ\tilde{R}_{i}^{t+\delta}R~it+δ和该区域中包含目标的可能性viv_ivi, 因此整体的模型建模为:
vi,R~it+δ=T(fRit,fSit+δ,Θ)v_i, \tilde{R}_{i}^{t+\delta} = \mathcal{T}(f_{R_i}^t, f_{S_i}^{t+\delta}, \Theta) vi,R~it+δ=T(fRit,fSit+δ,Θ)
其中Θ\ThetaΘ为网络参数.
上式建模的方式有两种, 一是隐式运动建模, 二是显式运动建模.
1.1 隐式运动建模:
隐式运动建模很简单, 将fRitf_{R_i}^tfRit和fSit+δf_{S_i}^{t+\delta}fSit+δ拼接起来输入到MLP, 同时预测置信度和位置. 位置描述的是ttt时刻与t+δt+\deltat+δ时刻的位置差异, 表示为:
mi=[xit+δ−xitxit,yit+δ−yityit,logwit+δwit,loghit+δhit]m_i = [\frac{x_i^{t + \delta} - x_i^t}{x_i^t}, \frac{y_i^{t + \delta} - y_i^t}{y_i^t}, \log{\frac{w_i^{t+\delta}}{w_i^t}}, \log{\frac{h_i^{t+\delta}}{h_i^t}}] mi=[xitxit+δ−xit,yityit+δ−yit,logwitwit+δ,loghithit+δ]
因此可以反解出新的位置R~it+δ=[xit+δ,yit+δ,wit+δ,hit+δ]\tilde{R}_{i}^{t+\delta} = [x_i^{t + \delta}, y_i^{t + \delta}, w_i^{t + \delta}, h_i^{t + \delta}]R~it+δ=[xit+δ,yit+δ,wit+δ,hit+δ]
损失函数:
损失函数由两部分组成, 一是目标置信度的focal loss, 二是预测边界框的准确程度. 对于GT框, 我们可以按照mim_imi的式子求出对应的mi∗m_i^*mi∗ , 定义为:
L=lfocal(vi∗,vi)+I(vi∗)lreg(mi,mi∗)L = l_{focal}(v_i^*, v_i)+\mathbb{I}(v_i^*)l_{reg}(m_i, m_i^*) L=lfocal(vi∗,vi)+I(vi∗)lreg(mi,mi∗)
其中上标∗*∗表示真值, lregl_{reg}lreg表示平滑L1损失.
1.2 显式运动建模
还可以采用更复杂的形式. 采用通道维的互相关操作, 可以通过预测热度图的方式计算像素级的响应图, 有点类似于求解光流. 对于第ttt帧的区域特征fRitf_{R_i}^tfRit和第t+δt+\deltat+δ帧的初步搜索区域特征fSit+δf_{S_i}^{t+\delta}fSit+δ, 计算通道维互相关, 即ri=fRit∗fSit+δr_i = f_{R_i}^t * f_{S_i}^{t+\delta}ri=fRit∗fSit+δ, 其中∗*∗表示互相关操作, 这样就得到了两种特征图的相似度.
我们利用得到的rir_iri, 进一步预测像素级置信度的map vvv和位置的map ppp, 如下图所示.
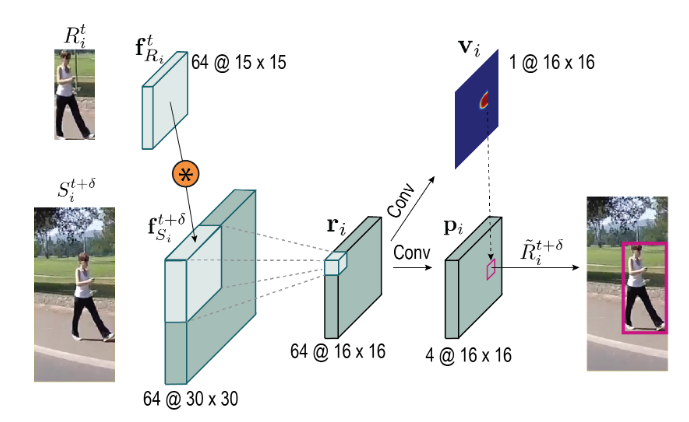
注意这里位置的map和一些无锚检测器类似, 预测的是offset. 具体地, 预测的是真实的bbox与当前像素四个方向的offset. 为此, 我们可以以像素级的置信度相应map中最大的点为准, 找到位置map中对应的位置, 即可直接求解出预测的位置. 也就是:
R~it+δ=R(pi∗(x,y));vit+δ=vi(x∗,y∗)s.t.(x∗,y∗)=argmaxx,y(vi∗ηi)\tilde{R}_i^{t+\delta}=\mathcal{R}(p_i^*(x, y)); ~~~~v_i^{t+\delta} = v_i(x^*, y^*) \\ s.t. ~~~(x^*, y^*) = \arg\max_{x,y}(v_i * \eta_i) R~it+δ=R(pi∗(x,y)); vit+δ=vi(x∗,y∗)s.t. (x∗,y∗)=argx,ymax(vi∗ηi)
其中ηi\eta_iηi为:
ηi(x,y)=λC+(1−λ)S(R(p(x,y)),Rit)\eta_i(x, y)= \lambda\mathcal{C}+(1-\lambda)\mathcal{S}(\mathcal{R(p(x,y))},R_i^t) ηi(x,y)=λC+(1−λ)S(R(p(x,y)),Rit)
表示的是一个penalty map, 其中C\mathcal{C}C是以过去帧位置RitR_i^tRit的几何中心为中心的cos窗函数, S\mathcal{S}S是预测出的位置和原本位置高宽差异的高斯函数, ηi\eta_iηi的作用是为了防止bbox尺寸的突然变化.
损失函数:
与隐式建模类似, 损失函数也是由置信度损失和bbox位置损失组成, 所不同的是该部分预测的是逐像素map, 因此需要逐像素进行计算. 置信度损失仍为focal loss, 位置损失包括中心点的差异与回归损失, 如下式所示:
L=∑x,ylfocal(vi(x,y),vi∗(x,y))+∑x,yI[vi∗(x,y)=1](w(x,y)⋅lreg(pi(x,y),pi∗(x,y)))L = \sum_{x, y}l_{focal}(v_i(x, y), v_i^*(x, y))+\\ \sum_{x, y}\mathbb{I}[v_i^*(x, y) =1](w(x, y) ·l_{reg}(p_i(x, y), p_i^*(x, y))) L=x,y∑lfocal(vi(x,y),vi∗(x,y))+x,y∑I[vi∗(x,y)=1](w(x,y)⋅lreg(pi(x,y),pi∗(x,y)))
w(x,y)w(x, y)w(x,y)就是中心点差异.
1.3 训练和推理
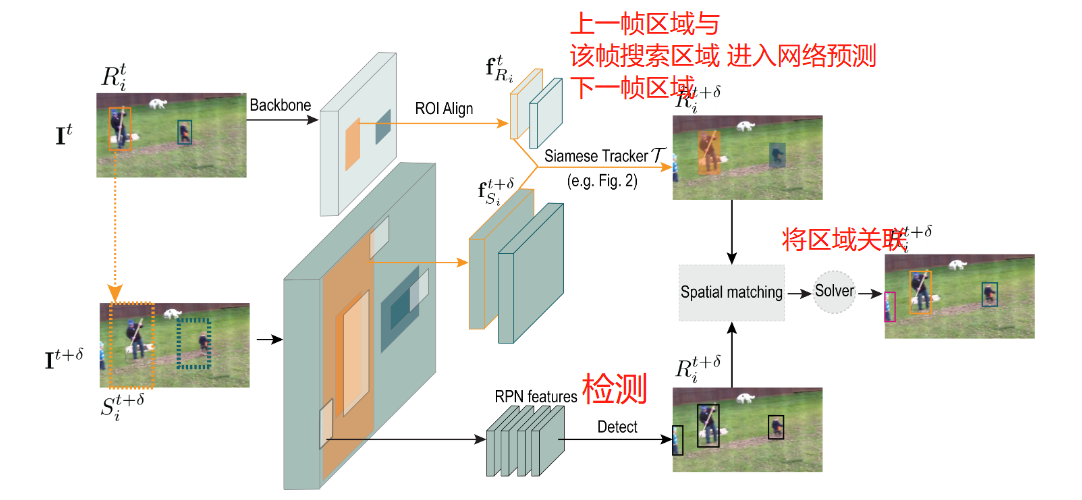
训练是按照端到端的方式训练的, 将Faster RCNN的检测损失与上面的损失结合. 推理也比较普通, 就是利用推理出的R~it+δ\tilde{R}_{i}^{t+\delta}R~it+δ和检测器检测的Rit+δR_{i}^{t+\delta}Rit+δ简单进行匹配即可.
整体流程下图所示:
2. 评价
这篇是很简单的一个笔记, 在SOT+MOT的方法里, 这篇应该也算简洁的, 创新之处在于隐式建模反推位置那一块, 以及逐像素map的思想也值得学习.
相关文章:
[论文阅读笔记19]SiamMOT: Siamese Multi-Object Tracking
这是CVPR2021的一篇文章, 是利用SOT的一些思想来进行MOT的运动估计. 文章地址: 文章 代码地址: 代码 0. 摘要 本文提出了一个孪生(Siamese)式的MOT网络, 该网络用来估计帧间目标的运动. 为了探究运动估计对多目标跟踪的影响, 本文提出了两种运动建模方式: 显式和隐式. 本文在…...
unix高级编程-fork和execve
fork和vfork vfork是老的实现方法又很多问题 vfork #include <sys/types.h> #include <unistd.h> #include <stdlib.h> #include <stdio.h> #include <string.h> #include <signal.h> #include <errno.h> #include <sys/stat.…...
Vue3+Ts+Vite开发插件并发布到npm
依赖版本信息如下: "vue": "^3.2.45""typescript": "~4.7.4""vite": "^4.0.0""less": "^4.1.3""terser": "^5.16.4"npm: 8.1.0node: 16.13.0 目标…...
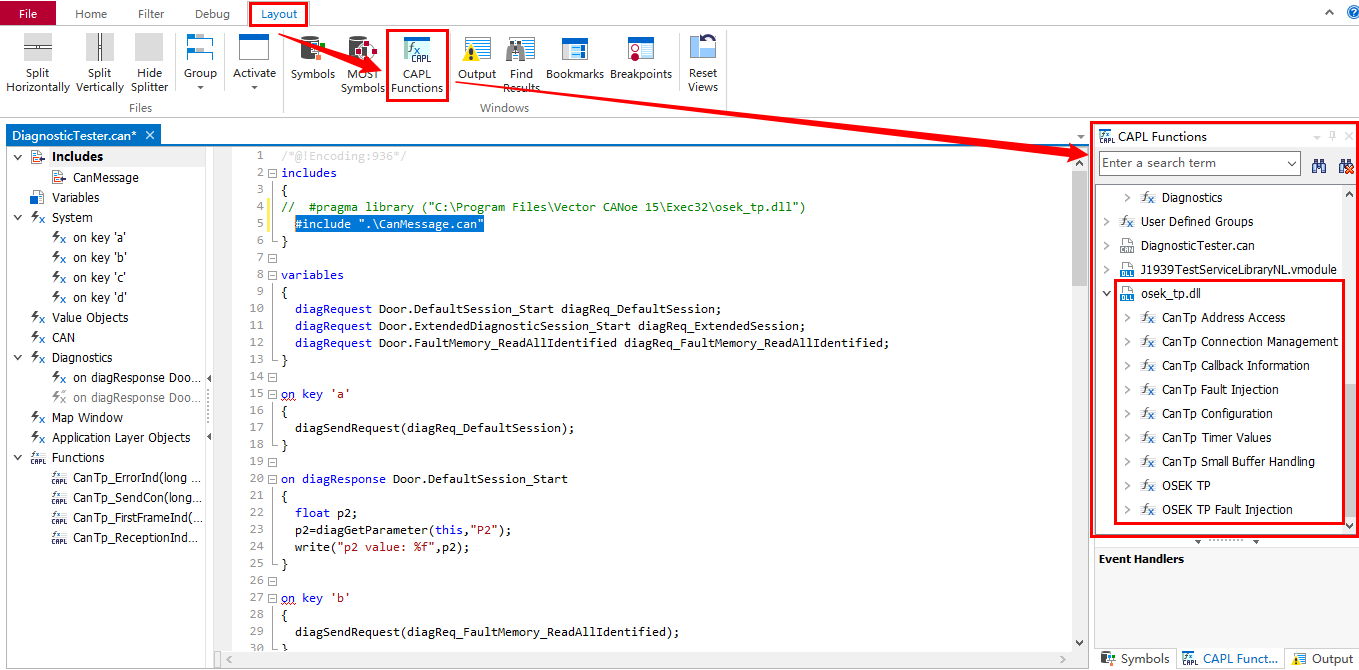
CAN TP层函数介绍
如果想使用CAN TP层函数,首先需要在网络节点或测试节点配置页面的Componets组件一栏添加osek_tp.dll文件。路径为:C:\Program Files\Vector CANoe 15\Exec32 至于节点的CAPL程序内需不需要引用这个dll文件,无所谓,可写可不写。但是如果是其他dll,必须在CAPL程序中引用。为…...
)
Spring架构篇--2.5 远程通信基础Select 源码篇--window--Select.open()
前言:在Socket通信中使用Select 来对NIO 进行实现,那么它们的实现方式是怎样的呢,本文从 Selector.open() 进行第一步的分析; Selector.open() : Selector 类: public static Selector open() throws IOEx…...

WEB静态交互展示【数据mock】
文章目录背景需求分析实现过程1.爬取原有项目数据2.将数据引入项目3.打包收工后记背景 接到公司一个【离谱】的需求,要求把已有的项目做一个演示版本(静态文件版本);本人觉得前端、后端搞个容器包,一个演示版本不就有…...
C#传智:分支Switch与循环While(第四天))
(4)C#传智:分支Switch与循环While(第四天)
一、异常捕获 定义:语法无错,程序因某些原因出现的错误,而不能正常运行。 用try-catch进行捕获。哪行代码可能出现异常,你就踹它一脚。 try { 可能会出现异常的代码; ---- …...

Stable-Baselines 3 部分源代码解读 2 on_policy_algorithm.py
Stable-Baselines 3 部分源代码解读 ./common/on_policy_algorithm.py 前言 阅读PPO相关的源码,了解一下标准库是如何建立PPO算法以及各种tricks的,以便于自己的复现。 在Pycharm里面一直跳转,可以看到PPO类是最终继承于基类,也…...
15. Qt中OPenGL的参数传递问题
1. 说明 在OPenGL中,需要使用GLSL语言来编写着色器的函数,在顶点着色器和片段着色器之间需要参数值的传递,且在CPU中的数据也需要传递到顶点着色器中进行使用。本文简单介绍几种参数传递的方式: (本文内容仅个人理解&…...
注意,这本2区SCI期刊最快18天录用,还差一步录用只因犯了这个错
发表案例分享: 2区医学综合类SCI,仅18天录用,录用后28天见刊 2023.02.10 | 见刊 2023.01.13 | Accepted 2023.01.11 | 提交返修稿 2022.12.26 | 提交论文至期刊部系统 录用截图来源:期刊部投稿系统 见刊截图来源:…...
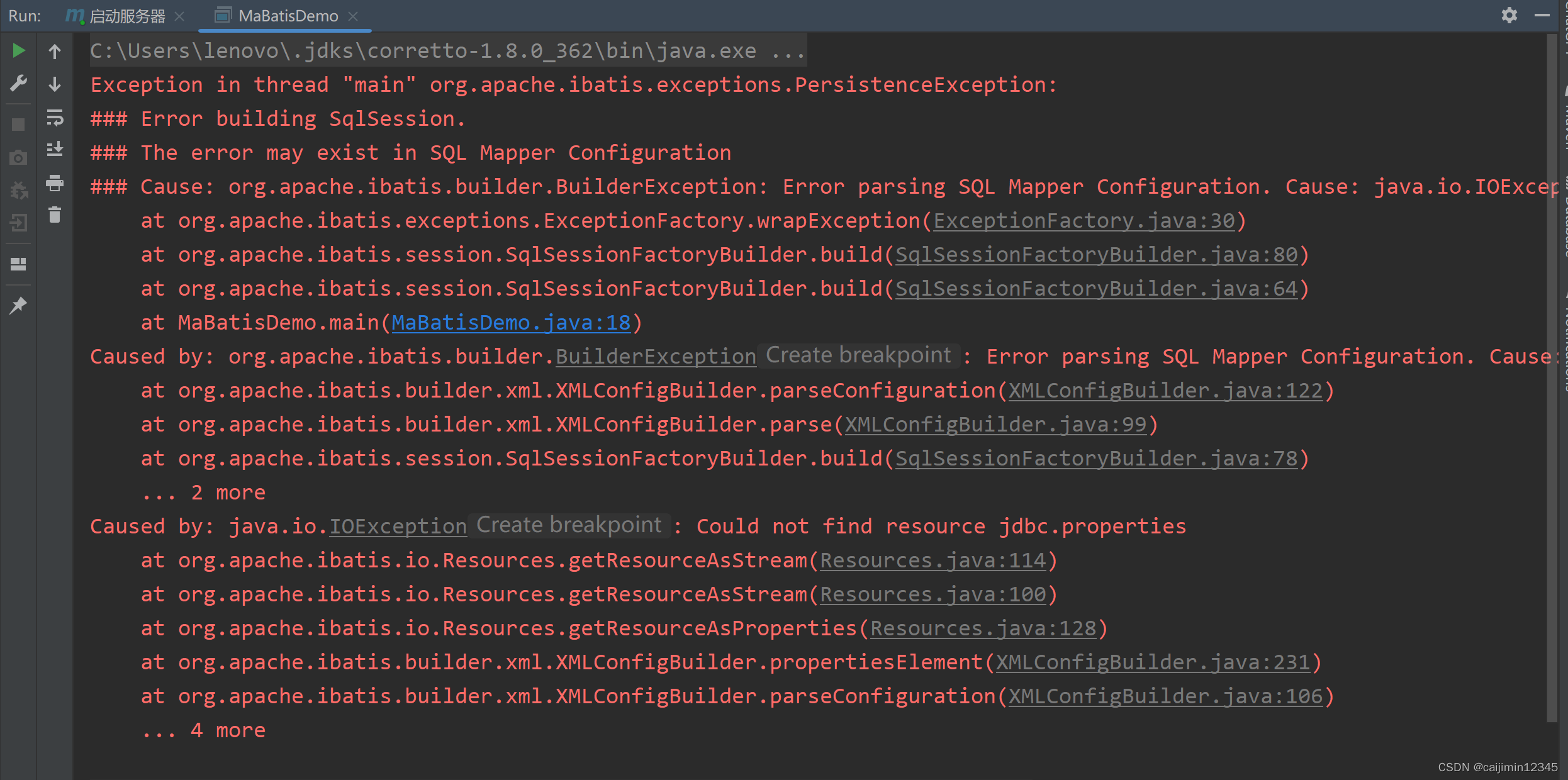
Could not find resource jdbc.properties问题的解决
以如下开头的内容: Exception in thread "main" org.apache.ibatis.exceptions.PersistenceException: ### Error building SqlSession. ### The error may exist in SQL Mapper Configuration 出现以上问题是没有在src/main/resources下创建jdbc.prop…...
也一定为true吗?泛型特点与好处)
【面试题】==与equals区别、Hashcode作用、hashcode相同equals()也一定为true吗?泛型特点与好处
文章目录1. 和 equals 的区别是什么?2.Hashcode的作用3. 两个对象的hashCode() 相同, 那么equals()也一定为 true吗?4.泛型常用特点5.使用泛型的好处?1. 和 equals 的区别是什么? “” 对于基本类型和引用类型 的作…...

Flex布局中的flex属性
1.flex-grow,flex-shrink,flex-basis取值含义 flex-grow: 延申性描述。在满足“延申条件”时,flex容器中的项目会按照设置的flex-grow值的比例来延申,占满容器剩余空间。 取值情况: 取负值无效。取0值表示不…...

SpringBoot + Ant Design Pro Vue实现动态路由和菜单的前后端分离框架
Ant Design Pro Vue默认路由和菜单配置是采用中心化的方式,在 router.config.js统一配置和管理,同时也提供了动态获取路由和菜单的解决方案,并将在2.0.3版本中提供,因到目前为止,官方发布的版本为2.0.2,所以…...

robotframework自动化测试环境搭建
环境说明 win10 python版本:3.8.3rc1 安装清单 安装配置 selenium安装 首先检查pip命令是否安装: C:\Users\name>pipUsage:pip <command> [options]Commands:install Install packages.download Do…...
尚硅谷《Redis7》(小白篇)
尚硅谷《Redis7 》(小白篇) 02 redis 是什么 官方网站: https://redis.io/ 作者 Git Hub https://github.com/antirez 03 04 05 能做什么 06 去哪下 Download https://redis.io/download/ redis中文文档 https://www.redis.com.cn/docu…...

并非从0开始的c++ day6
并非从0开始的c day6二级指针练习-文件读写位运算位逻辑运算符按位取反 ~位于(AND):&位或(OR): |位异或: ^移位运算符左移<<右移>>多维数组一维数组数组名一维数组名传入到函数参数中数组指…...

PMP考前冲刺2.22 | 2023新征程,一举拿证
承载2023新一年的好运让我们迈向PMP终点一起冲刺!一起拿证!每日5道PMP习题助大家上岸PMP!!!题目1-2:1.在新产品开发过程中,项目经理关注到行业排名第一的公司刚刚发布同类型的产品。相比竞品&am…...

RxJava的订阅过程
要使用Rxjava首先要导入两个包,其中rxandroid是rxjava在android中的扩展 implementation io.reactivex:rxandroid:1.2.1implementation io.reactivex:rxjava:1.2.0首先从最基本的Observable的创建到订阅开始分析 Observable.create(new Observable.OnSubscribe<S…...

【2.22】MySQL、Redis、动态规划
认识Redis Redis是一种基于内存的数据库,对数据的读写操作都是在内存中完成的,因此读写速度非常快,常用于缓存,消息队列,分布式锁等场景。 Redis提供了多种数据类型来支持不同的业务场景,比如String(字符串…...

测试微信模版消息推送
进入“开发接口管理”--“公众平台测试账号”,无需申请公众账号、可在测试账号中体验并测试微信公众平台所有高级接口。 获取access_token: 自定义模版消息: 关注测试号:扫二维码关注测试号。 发送模版消息: import requests da…...
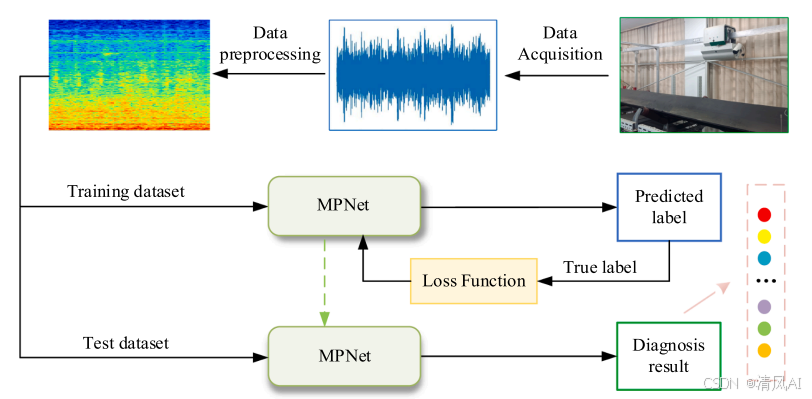
MPNet:旋转机械轻量化故障诊断模型详解python代码复现
目录 一、问题背景与挑战 二、MPNet核心架构 2.1 多分支特征融合模块(MBFM) 2.2 残差注意力金字塔模块(RAPM) 2.2.1 空间金字塔注意力(SPA) 2.2.2 金字塔残差块(PRBlock) 2.3 分类器设计 三、关键技术突破 3.1 多尺度特征融合 3.2 轻量化设计策略 3.3 抗噪声…...

.Net框架,除了EF还有很多很多......
文章目录 1. 引言2. Dapper2.1 概述与设计原理2.2 核心功能与代码示例基本查询多映射查询存储过程调用 2.3 性能优化原理2.4 适用场景 3. NHibernate3.1 概述与架构设计3.2 映射配置示例Fluent映射XML映射 3.3 查询示例HQL查询Criteria APILINQ提供程序 3.4 高级特性3.5 适用场…...
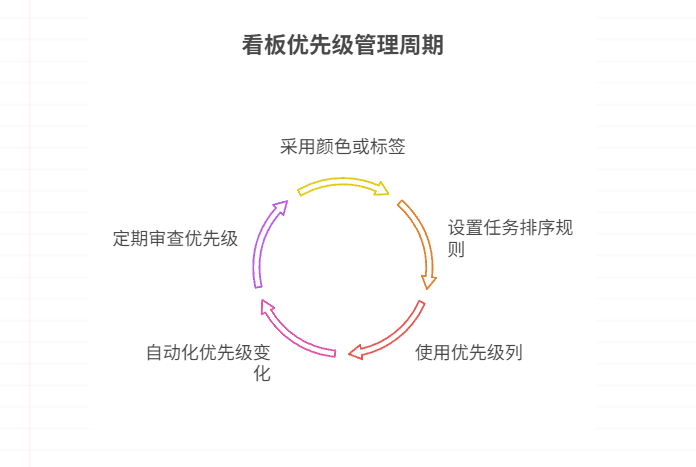
如何在看板中体现优先级变化
在看板中有效体现优先级变化的关键措施包括:采用颜色或标签标识优先级、设置任务排序规则、使用独立的优先级列或泳道、结合自动化规则同步优先级变化、建立定期的优先级审查流程。其中,设置任务排序规则尤其重要,因为它让看板视觉上直观地体…...
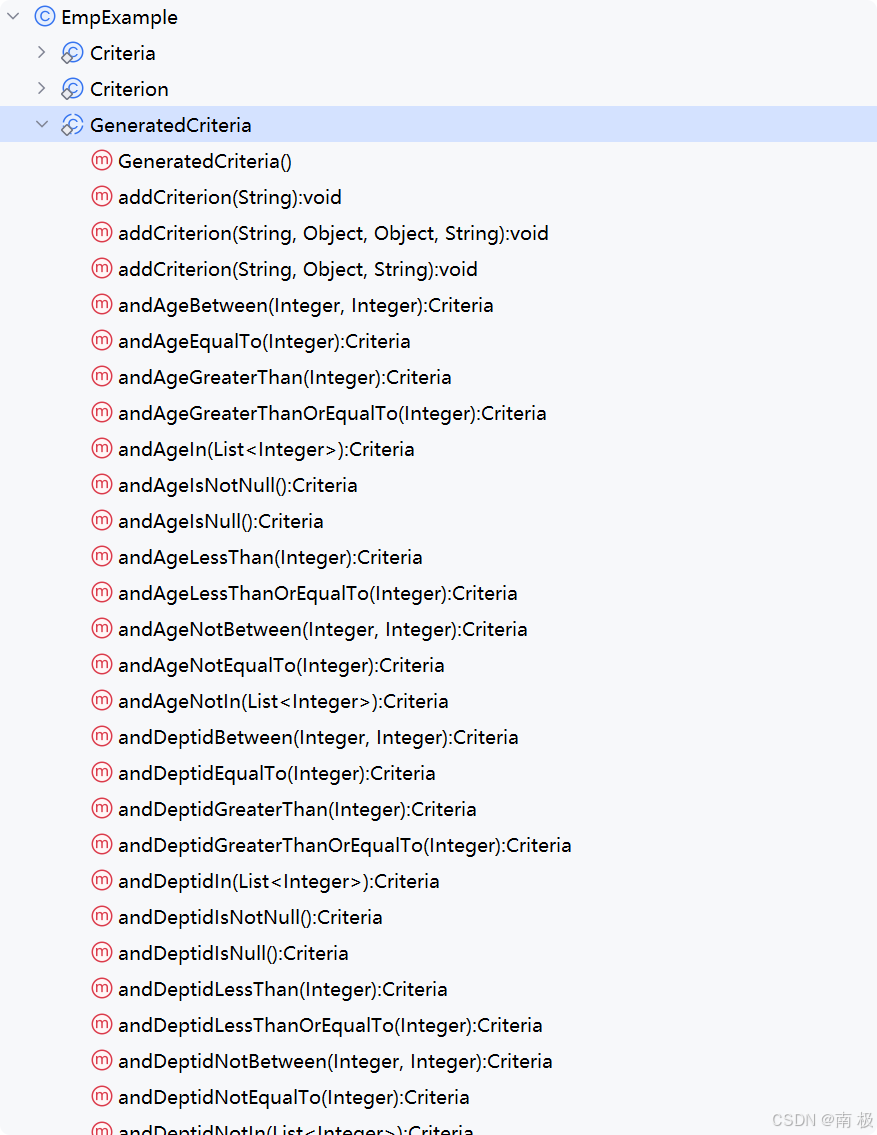
Mybatis逆向工程,动态创建实体类、条件扩展类、Mapper接口、Mapper.xml映射文件
今天呢,博主的学习进度也是步入了Java Mybatis 框架,目前正在逐步杨帆旗航。 那么接下来就给大家出一期有关 Mybatis 逆向工程的教学,希望能对大家有所帮助,也特别欢迎大家指点不足之处,小生很乐意接受正确的建议&…...

Go 语言接口详解
Go 语言接口详解 核心概念 接口定义 在 Go 语言中,接口是一种抽象类型,它定义了一组方法的集合: // 定义接口 type Shape interface {Area() float64Perimeter() float64 } 接口实现 Go 接口的实现是隐式的: // 矩形结构体…...

基于Uniapp开发HarmonyOS 5.0旅游应用技术实践
一、技术选型背景 1.跨平台优势 Uniapp采用Vue.js框架,支持"一次开发,多端部署",可同步生成HarmonyOS、iOS、Android等多平台应用。 2.鸿蒙特性融合 HarmonyOS 5.0的分布式能力与原子化服务,为旅游应用带来…...

基于Docker Compose部署Java微服务项目
一. 创建根项目 根项目(父项目)主要用于依赖管理 一些需要注意的点: 打包方式需要为 pom<modules>里需要注册子模块不要引入maven的打包插件,否则打包时会出问题 <?xml version"1.0" encoding"UTF-8…...
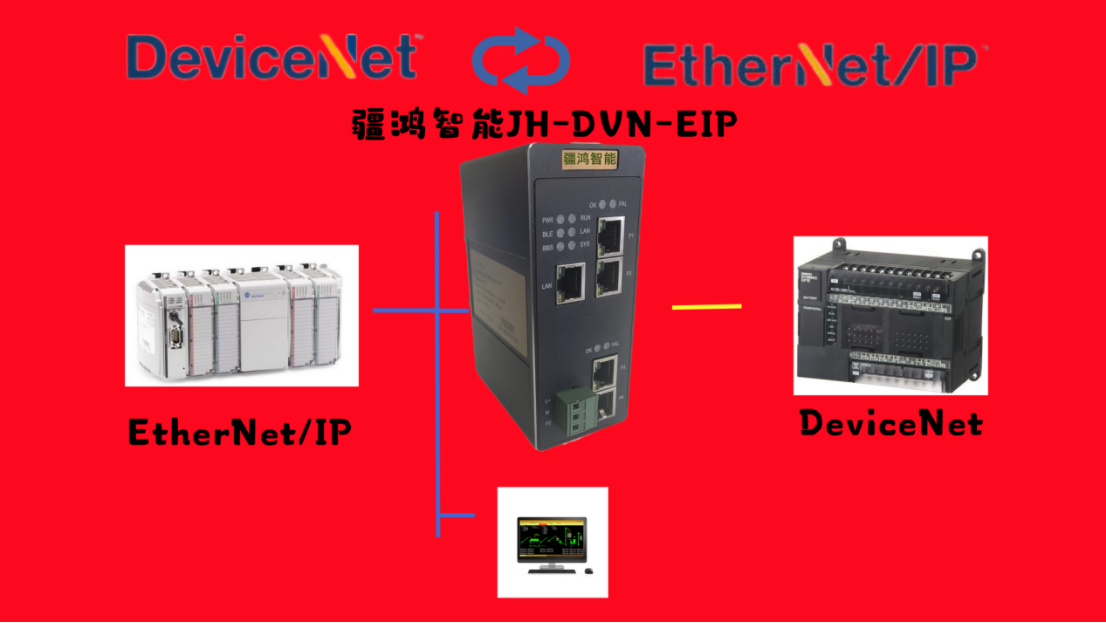
EtherNet/IP转DeviceNet协议网关详解
一,设备主要功能 疆鸿智能JH-DVN-EIP本产品是自主研发的一款EtherNet/IP从站功能的通讯网关。该产品主要功能是连接DeviceNet总线和EtherNet/IP网络,本网关连接到EtherNet/IP总线中做为从站使用,连接到DeviceNet总线中做为从站使用。 在自动…...
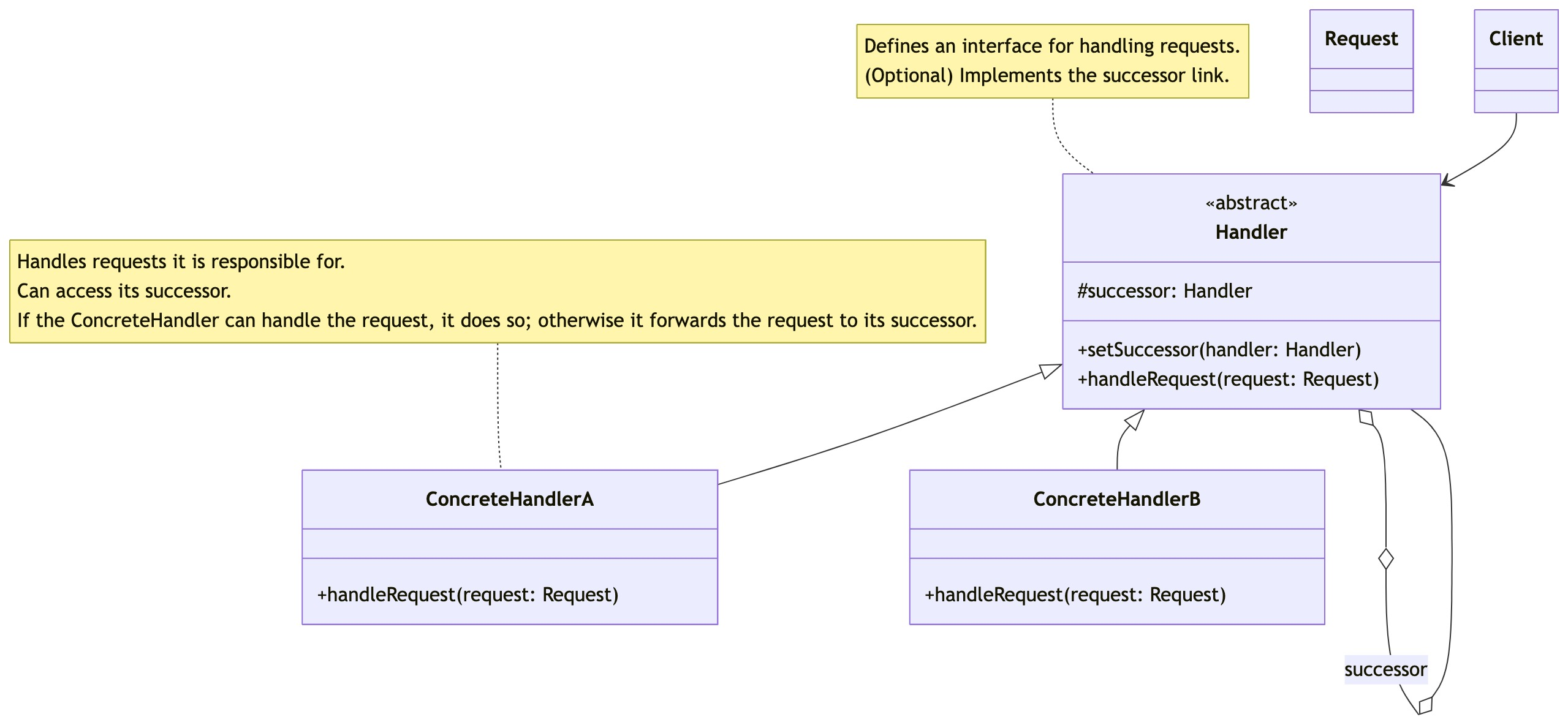
零基础设计模式——行为型模式 - 责任链模式
第四部分:行为型模式 - 责任链模式 (Chain of Responsibility Pattern) 欢迎来到行为型模式的学习!行为型模式关注对象之间的职责分配、算法封装和对象间的交互。我们将学习的第一个行为型模式是责任链模式。 核心思想:使多个对象都有机会处…...