Pytorch 多卡并行(2)—— 使用 torchrun 进行容错处理
- 前文 Pytorch 多卡并行(1)—— 原理简介和 DDP 并行实践 介绍了使用 Pytorch 的 DDP 库进行单机多卡训练的方法,本文进一步说明如何用 torchrun 改写前文代码,以提高模型训练的效率和容错性
- torchrun 是从 Pytorch 1.9.0 开始引入的一个命令,请保证您的 pytorch 版本符合要求
- 完整代码下载:wxc971231/ddp-tutorial-series
文章目录
- 1. torchrun
- 2. 使用 torchrun 改写 DDP 代码
- 3. 调试代码
1. torchrun
-
在训练过程中,很容易遇到各种各样的错误,比如内存不足、网络故障、硬件故障等等。这些错误会导致训练过程中断或失败,从而浪费了训练时间和计算资源。 torchrun 允许我们在训练过程中按一定周期保存快照(snapshots),一旦某一并行进程出错退出,torchrun 会自动从最近 snapshots 重启所有进程。Snapshots 中要保存的参数由我们自行设定,它是模型 checkpoint 的超集,要包含恢复训练所需的全部参数,比如
- 当前 epoch 值
- 模型参数 model.state_dict()
- 学习率调度器参数 lr_scheduler.state_dict()
- 优化器参数 optimizer.state_dict()
- 其他必要参数
-
除了以上自动重启功能外,torchrun 还有其他一些功能
- torchrun 可以自动完成所有环境变量的设置,可以从环境变量中获取 rank 和 world size 等信息
os.environ['RANK'] # 得到在所有node的所有进程中当前GPU进程的rank os.environ['LOCAL_RANK'] # 得到在当前node中当前GPU进程的rank os.environ['WORLD_SIZE'] # 得到GPU的数量 - torchrun 可以完成进程分配工作,不再需要使用
mp.spawn手动分发进程,只需要设置一个通用的 main() 函数入口,然后用torchrun命令启动脚本即可 - 快照功能允许进行断点续训
- torchrun 可以自动完成所有环境变量的设置,可以从环境变量中获取 rank 和 world size 等信息
-
使用 torchrun 时,程序通常有以下结构
def main(args):ddp_setup() # 初始化进程池load_train_objs(args) # 设置 dataset, model, optimizer, trainer 等组件,若存在 snapshot 则从中加载参数trian(args) # 进行训练destroy_process_group() # 销毁进程池 def train(args):for batch in iter(dataset):train_step(batch)if should_checkpoint:save_snapshot(snapshot_path) # 用 rank0 保存 snapshotif __name__ == "__main__":# 加载参数args = parser.parse_args() # 现在 torchrun 负责在各个 GPU 上生成进程并执行,不再需要 mp.spawn 了main(args) -
使用 torchrun 命令来启动程序
torchrun --standalone --nproc_per_node=gpu XXX.py--standalone代表单机运行--nproc_per_node=gpu代表使用所有可用GPU。等于号后也可写gpu数量n,这样会使用前n个GPU
如果想要进一步指定要运行的 GPU,可以通过 CUDA_VISIBLE_DEVICES 设置GPU可见性,比如
CUDA_VISIBLE_DEVICES=2,3 torchrun --standalone --nproc_per_node=gpu multi_gpu_torchrun.py这样会把本机上的 GPU2 和 GPU3 看做 GPU0 和 GPU1 运行
2. 使用 torchrun 改写 DDP 代码
- 使用 torchrun 改写以下 DDP 代码
# 使用 DistributedDataParallel 进行单机多卡训练 import torch import torch.nn.functional as F from torch.utils.data import Dataset, DataLoader import os# 对 python 多进程的一个 pytorch 包装 import torch.multiprocessing as mp# 这个 sampler 可以把采样的数据分散到各个 CPU 上 from torch.utils.data.distributed import DistributedSampler # 实现分布式数据并行的核心类 from torch.nn.parallel import DistributedDataParallel as DDP # DDP 在每个 GPU 上运行一个进程,其中都有一套完全相同的 Trainer 副本(包括model和optimizer) # 各个进程之间通过一个进程池进行通信,这两个方法来初始化和销毁进程池 from torch.distributed import init_process_group, destroy_process_group def ddp_setup(rank, world_size):"""setup the distribution process groupArgs:rank: Unique identifier of each processworld_size: Total number of processes"""# MASTER Node(运行 rank0 进程,多机多卡时的主机)用来协调各个 Node 的所有进程之间的通信os.environ["MASTER_ADDR"] = "localhost" # 由于这里是单机实验所以直接写 localhostos.environ["MASTER_PORT"] = "12355" # 任意空闲端口init_process_group(backend="nccl", # Nvidia CUDA CPU 用这个 "nccl"rank=rank, world_size=world_size)torch.cuda.set_device(rank)class Trainer:def __init__(self,model: torch.nn.Module,train_data: DataLoader,optimizer: torch.optim.Optimizer,gpu_id: int,save_every: int,) -> None:self.gpu_id = gpu_idself.model = model.to(gpu_id)self.train_data = train_dataself.optimizer = optimizerself.save_every = save_every # 指定保存 ckpt 的周期self.model = DDP(model, device_ids=[gpu_id]) # model 要用 DDP 包装一下def _run_batch(self, source, targets):self.optimizer.zero_grad()output = self.model(source)loss = F.cross_entropy(output, targets)loss.backward()self.optimizer.step()def _run_epoch(self, epoch):b_sz = len(next(iter(self.train_data))[0])print(f"[GPU{self.gpu_id}] Epoch {epoch} | Batchsize: {b_sz} | Steps: {len(self.train_data)}")self.train_data.sampler.set_epoch(epoch) # 在各个 epoch 入口调用 DistributedSampler 的 set_epoch 方法是很重要的,这样才能打乱每个 epoch 的样本顺序for source, targets in self.train_data: source = source.to(self.gpu_id)targets = targets.to(self.gpu_id)self._run_batch(source, targets)def _save_checkpoint(self, epoch):ckp = self.model.module.state_dict() # 由于多了一层 DDP 包装,通过 .module 获取原始参数 PATH = "checkpoint.pt"torch.save(ckp, PATH)print(f"Epoch {epoch} | Training checkpoint saved at {PATH}")def train(self, max_epochs: int):for epoch in range(max_epochs):self._run_epoch(epoch)# 各个 GPU 上都在跑一样的训练进程,这里指定 rank0 进程保存 ckpt 以免重复保存if self.gpu_id == 0 and epoch % self.save_every == 0:self._save_checkpoint(epoch)class MyTrainDataset(Dataset):def __init__(self, size):self.size = sizeself.data = [(torch.rand(20), torch.rand(1)) for _ in range(size)]def __len__(self):return self.sizedef __getitem__(self, index):return self.data[index]def load_train_objs():train_set = MyTrainDataset(2048) # load your datasetmodel = torch.nn.Linear(20, 1) # load your modeloptimizer = torch.optim.SGD(model.parameters(), lr=1e-3)return train_set, model, optimizerdef prepare_dataloader(dataset: Dataset, batch_size: int):return DataLoader(dataset,batch_size=batch_size,pin_memory=True,shuffle=False, # 设置了新的 sampler,参数 shuffle 要设置为 False sampler=DistributedSampler(dataset) # 这个 sampler 自动将数据分块后送个各个 GPU,它能避免数据重叠)def main(rank: int, world_size: int, save_every: int, total_epochs: int, batch_size: int):# 初始化进程池ddp_setup(rank, world_size)# 进行训练dataset, model, optimizer = load_train_objs()train_data = prepare_dataloader(dataset, batch_size)trainer = Trainer(model, train_data, optimizer, rank, save_every)trainer.train(total_epochs)# 销毁进程池destroy_process_group()if __name__ == "__main__":import argparseparser = argparse.ArgumentParser(description='simple distributed training job')parser.add_argument('--total-epochs', type=int, default=50, help='Total epochs to train the model')parser.add_argument('--save-every', type=int, default=10, help='How often to save a snapshot')parser.add_argument('--batch_size', default=32, type=int, help='Input batch size on each device (default: 32)')args = parser.parse_args()world_size = torch.cuda.device_count()# 利用 mp.spawn,在整个 distribution group 的 nprocs 个 GPU 上生成进程来执行 fn 方法,并能设置要传入 fn 的参数 args# 注意不需要 fn 的 rank 参数,它由 mp.spawn 自动分配mp.spawn(fn=main, args=(world_size, args.save_every, args.total_epochs, args.batch_size), nprocs=world_size) - 改写后的代码如下所示,请参考注释自行对比
# 使用 DistributedDataParallel 进行单机多卡训练的基础上,使用 torchrun 进行容错处理,增强程序稳定性 # torchrun 允许我们在训练过程中按一定保存 snapshots,其中应当包含当前 epoch、模型参数(ckpt)、优化器参数、lr调度器参数等恢复训练所需的全部参数 # 一旦程序出错退出,torchrun 会自动从最近 snapshots 重启所有进程 # 除了增强稳定性外,torchrun 还会自动完成所有环境变量设置和进程分配工作,所以不再需要手动设置 rank 或用 mp.spawn 生成并分配进程import torch import torch.nn.functional as F from torch.utils.data import Dataset, DataLoader import os# 对 python 多进程的一个 pytorch 包装 import torch.multiprocessing as mp# 这个 sampler 可以把采样的数据分散到各个 CPU 上 from torch.utils.data.distributed import DistributedSampler # 实现分布式数据并行的核心类 from torch.nn.parallel import DistributedDataParallel as DDP # DDP 在每个 GPU 上运行一个进程,其中都有一套完全相同的 Trainer 副本(包括model和optimizer) # 各个进程之间通过一个进程池进行通信,这两个方法来初始化和销毁进程池 from torch.distributed import init_process_group, destroy_process_group def ddp_setup():# torchrun 会处理环境变量以及 rank & world_size 设置os.environ["MASTER_ADDR"] = "localhost" # 由于这里是单机实验所以直接写 localhostos.environ["MASTER_PORT"] = "12355" # 任意空闲端口init_process_group(backend="nccl")torch.cuda.set_device(int(os.environ['LOCAL_RANK'])))class Trainer:def __init__(self,model: torch.nn.Module,train_data: DataLoader,optimizer: torch.optim.Optimizer,save_every: int, snapshot_path: str, # 保存 snapshots 的位置 ) -> None:self.gpu_id = int(os.environ['LOCAL_RANK']) # torchrun 会自动设置这个环境变量指出当前进程的 rankself.model = model.to(self.gpu_id)self.train_data = train_dataself.optimizer = optimizerself.save_every = save_every # 指定保存 snapshots 的周期self.epochs_run = 0 # 存储将要保存在 snapshots 中的 epoch num 信息self.snapshot_path = snapshot_path# 若存在 snapshots 则加载,这样重复运行指令就能自动继续训练了if os.path.exists(snapshot_path):print('loading snapshot')self._load_snapshot(snapshot_path)self.model = DDP(self.model, device_ids=[self.gpu_id]) # model 要用 DDP 包装一下def _load_snapshot(self, snapshot_path):''' 加载 snapshot 并重启训练 '''loc = f"cuda:{self.gpu_id}"snapshot = torch.load(snapshot_path, map_location=loc)self.model.load_state_dict(snapshot["MODEL_STATE"])self.epochs_run = snapshot["EPOCHS_RUN"]print(f"Resuming training from snapshot at Epoch {self.epochs_run}")def _run_batch(self, source, targets):self.optimizer.zero_grad()output = self.model(source)loss = F.cross_entropy(output, targets)loss.backward()self.optimizer.step()def _run_epoch(self, epoch):b_sz = len(next(iter(self.train_data))[0])print(f"[GPU{self.gpu_id}] Epoch {epoch} | Batchsize: {b_sz} | Steps: {len(self.train_data)}")self.train_data.sampler.set_epoch(epoch)for source, targets in self.train_data:source = source.to(self.gpu_id)targets = targets.to(self.gpu_id)self._run_batch(source, targets)def _save_snapshot(self, epoch):# 在 snapshot 中保存恢复训练所必须的参数snapshot = {"MODEL_STATE": self.model.module.state_dict(), # 由于多了一层 DDP 包装,通过 .module 获取原始参数 "EPOCHS_RUN": epoch,}torch.save(snapshot, self.snapshot_path)print(f"Epoch {epoch} | Training snapshot saved at {self.snapshot_path}")def train(self, max_epochs: int):for epoch in range(self.epochs_run, max_epochs): # 现在从 self.epochs_run 开始训练,统一重启的情况self._run_epoch(epoch)# 各个 GPU 上都在跑一样的训练进程,这里指定 rank0 进程保存 snapshot 以免重复保存if self.gpu_id == 0 and epoch % self.save_every == 0:self._save_snapshot(epoch)class MyTrainDataset(Dataset):def __init__(self, size):self.size = sizeself.data = [(torch.rand(20), torch.rand(1)) for _ in range(size)]def __len__(self):return self.sizedef __getitem__(self, index):return self.data[index]def load_train_objs():train_set = MyTrainDataset(2048) # load your datasetmodel = torch.nn.Linear(20, 1) # load your modeloptimizer = torch.optim.SGD(model.parameters(), lr=1e-3)return train_set, model, optimizerdef prepare_dataloader(dataset: Dataset, batch_size: int):return DataLoader(dataset,batch_size=batch_size,pin_memory=True,shuffle=False, # 设置了新的 sampler,参数 shuffle 要设置为 False sampler=DistributedSampler(dataset) # 这个 sampler 自动将数据分块后送个各个 GPU,它能避免数据重叠)def main(save_every: int, total_epochs: int, batch_size: int, snapshot_path: str="snapshot.pt"):# 初始化进程池ddp_setup()# 进行训练dataset, model, optimizer = load_train_objs()train_data = prepare_dataloader(dataset, batch_size)trainer = Trainer(model, train_data, optimizer, save_every, snapshot_path)trainer.train(total_epochs)# 销毁进程池destroy_process_group()if __name__ == "__main__":import argparseparser = argparse.ArgumentParser(description='simple distributed training job')parser.add_argument('--total-epochs', type=int, default=50, help='Total epochs to train the model')parser.add_argument('--save-every', type=int, default=10, help='How often to save a snapshot')parser.add_argument('--batch_size', default=32, type=int, help='Input batch size on each device (default: 32)')args = parser.parse_args()# 现在 torchrun 负责在各个 GPU 上生成进程并执行,不再需要 mp.spawn 了main(args.save_every, args.total_epochs, args.batch_size)''' 运行命令: torchrun --standalone --nproc_per_node=gpu multi_gpu_torchrun.py参数说明:--standalone 代表单机运行 --nproc_per_node=gpu 代表使用所有可用GPU, 等于号后也可写gpu数量n, 这样会使用前n个GPU运行后获取参数:os.environ['RANK'] 得到在所有机器所有进程中当前GPU的rankos.environ['LOCAL_RANK'] 得到在当前node中当前GPU的rankos.environ['WORLD_SIZE'] 得到GPU的数量通过 CUDA_VISIBLE_DEVICES 指定程序可见的GPU, 从而实现指定GPU运行:CUDA_VISIBLE_DEVICES=0,3 torchrun --standalone --nproc_per_node=gpu multi_gpu_torchrun.py '''
3. 调试代码
- 如果使用 VScode 的话,可以如下编辑 launch.json 文件,然后像往常一样设置断点按 f5 调试即可
注意其中 “program” 是你的 torchrun 脚本路径,可使用{"version": "0.2.0","configurations": [{"name": "Python: torchrun","type": "python","request": "launch",// 设置 program 的路径为 torchrun 脚本对应的绝对路径"program": "/home/tim/anaconda3/envs/project/lib/python3.8/site-packages/torch/distributed/run.py",// 设置 torchrun 命令的参数"args":["--standalone","--nproc_per_node=gpu","multi_gpu_torchrun.py"],"console": "integratedTerminal","justMyCode": true}] }pip show torch查看 torch 的安装路径进而找到它
相关文章:
—— 使用 torchrun 进行容错处理)
Pytorch 多卡并行(2)—— 使用 torchrun 进行容错处理
前文 Pytorch 多卡并行(1)—— 原理简介和 DDP 并行实践 介绍了使用 Pytorch 的 DDP 库进行单机多卡训练的方法,本文进一步说明如何用 torchrun 改写前文代码,以提高模型训练的效率和容错性torchrun 是从 Pytorch 1.9.0 开始引入的…...
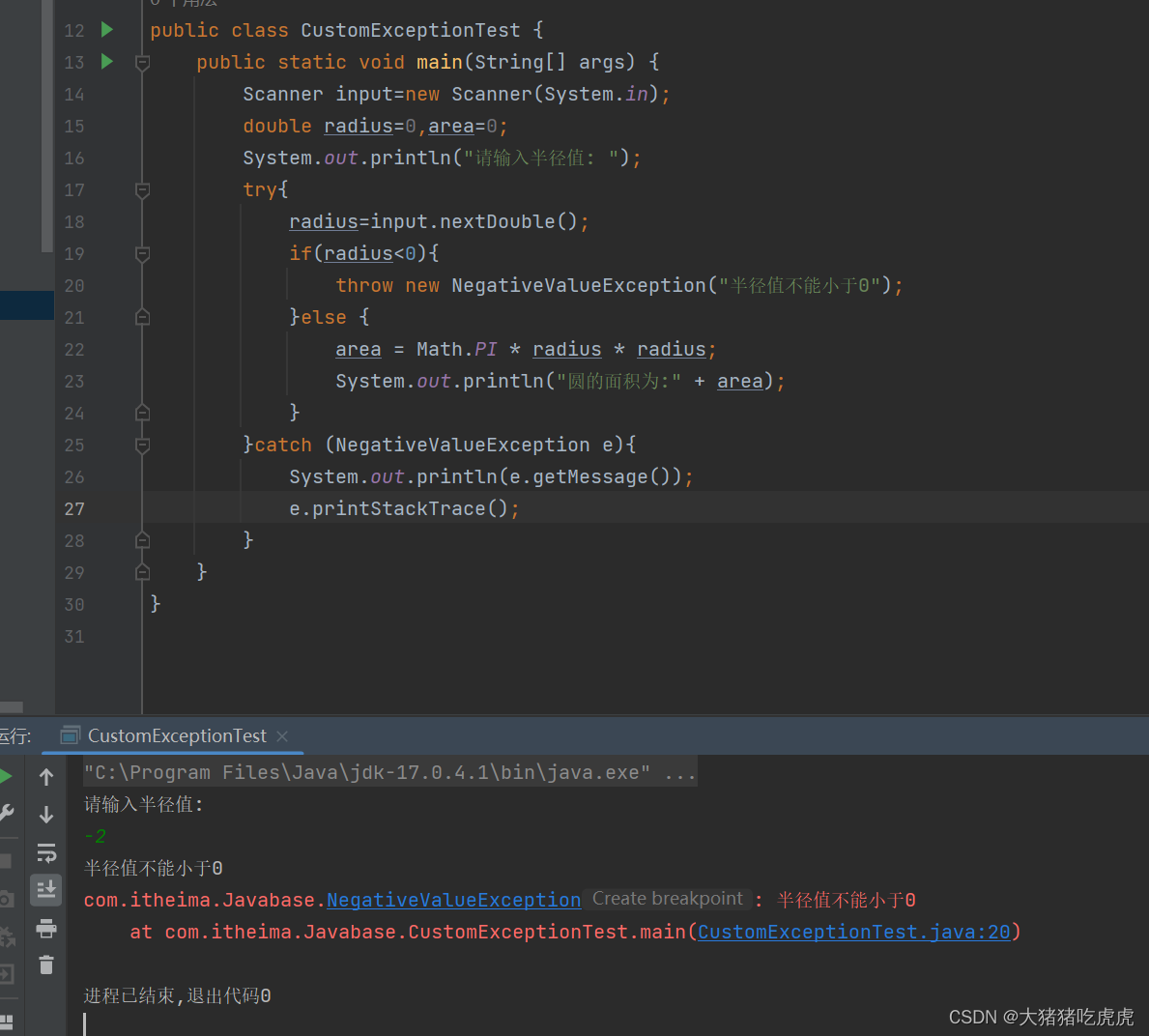
Java异常处理(详解)
Java异常处理 前言一、异常与异常类1.异常的概念2.异常类Error类Exception类(1)非检查异常(2)检查异常 二、异常处理1.异常的抛出与捕获2.try-catch-finally语句3.声明方法抛出异常3.用throw 语句抛出异常 三、自定义异常类 前言 …...

嵌入式-数据进制之间的转换
目录 一.简介 1.1十进制 1.2二进制 1.3八进制 1.4十六进制 二.进制转换 2.1二进制-十进制转换 2.2八进制-十进制转换 2.3十六进制-十进制转换 2.4十进制-二进制转换 2.5十进制-八进制转换 2.6十进制-十六进制转换 2.7小数部分转换 一.简介 被传入到计算机的数据要…...
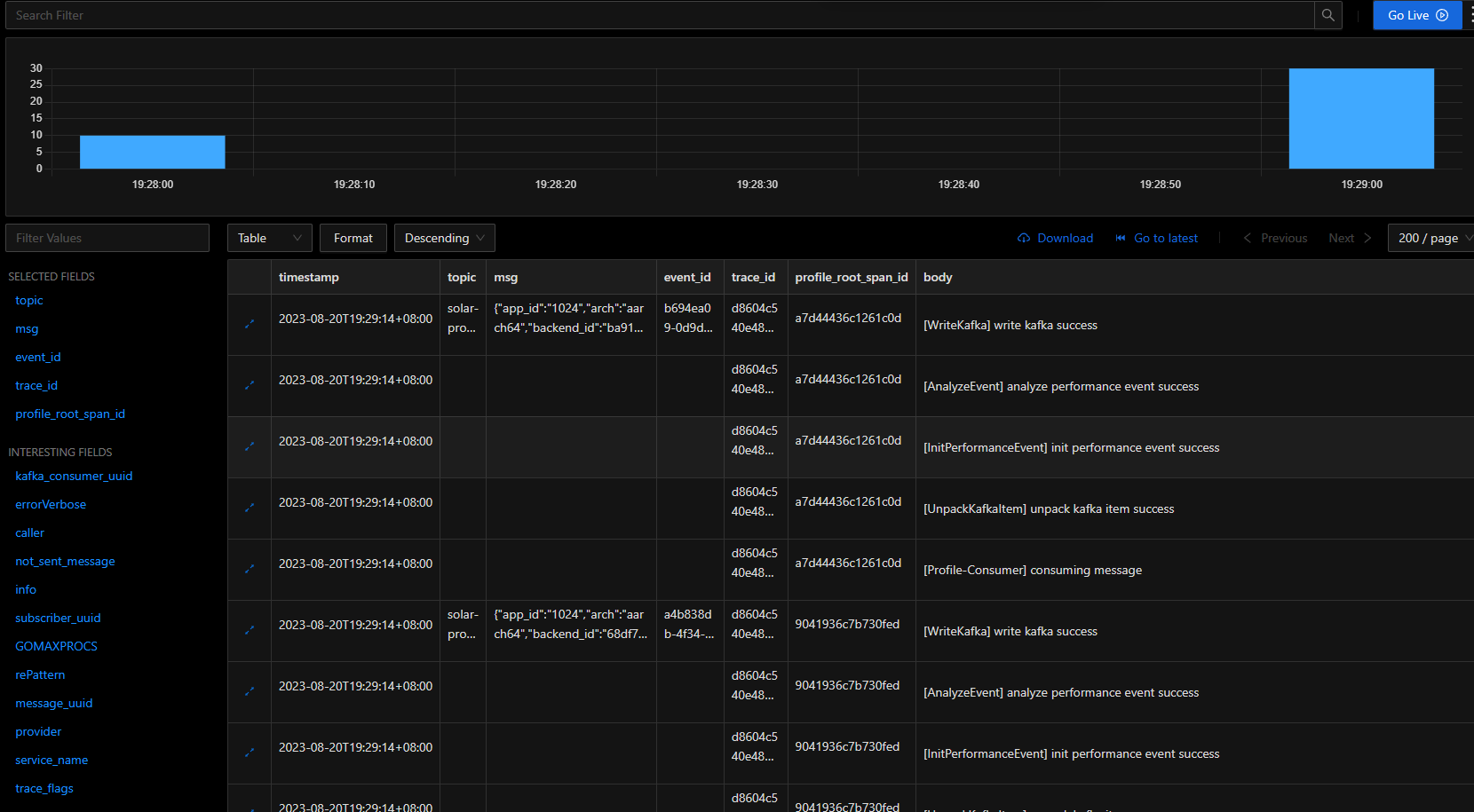
腾讯mini项目-【指标监控服务重构】2023-08-20
今日已办 PPT制作 答辩流程 概述:对项目背景、架构进行介绍(体现我们分组的区别和需求)人员:小组成员进行简短的自我介绍和在项目中的定位,分工进展:对项目进展介绍,其中a、b两组的区别和工作…...

智能文本纠错API的应用与工作原理解析
引言 在数字时代,文本撰写和传播变得日益重要,无论是在学校里写论文、在职场中发送邮件,还是在社交媒体上发表观点。然而,文字错误、标点符号错误、语法问题和不当的表达常常会削弱文本的质量,降低信息传达的效果。为…...

在springboot下将mybatis升级为mybatis-plus
在springboot下将mybatis升级为mybatis-plus 1. 整体描述2. 具体步骤2.1 更新pom引用2.2 更新yml配置2.3 更新config配置2.4 BaseEntity修改 3. 程序启动4. 总结 1. 整体描述 之前项目工程用的是mybatis,现在需要将其替换为mybatis-plus,mybatis-plus的…...
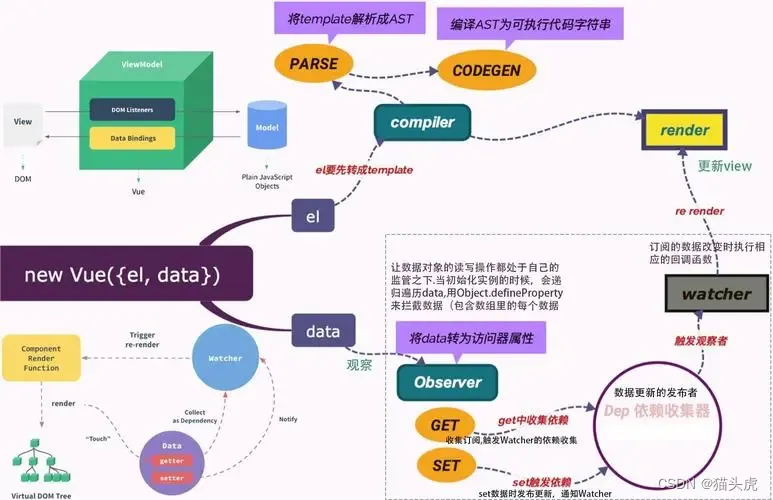
Vuex详解:Vue.js的状态管理方案
🌷🍁 博主猫头虎(🐅🐾)带您 Go to New World✨🍁 🦄 博客首页——🐅🐾猫头虎的博客🎐 🐳 《面试题大全专栏》 🦕 文章图文…...

栈与队列经典题目——用队列实现栈
本篇文章讲解栈和队列这一部分知识点的经典题目:用栈实现队列、用队列实现栈。对应的题号分别为:Leetcode.225——用队列实现栈,。 在对两个题目进行解释之前,先回顾以下栈和队列的特点与不同: 栈是一种特殊的线性表…...
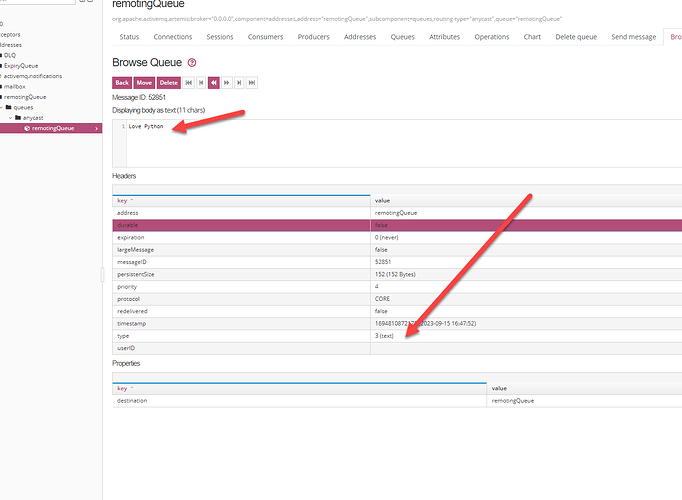
Python stomp 发送消息无法显示文本
我们向消息服务器通过 stomp 发送的是文本消息。 当消息服务器发送成功后,消息服务器上的文本没有显示,显示的是 2 进制的数据。 如上图,消息没有作为文本来显示。 问题和解决 消息服务器是如何判断发送的小时是文本还是二进制的。 根据官…...
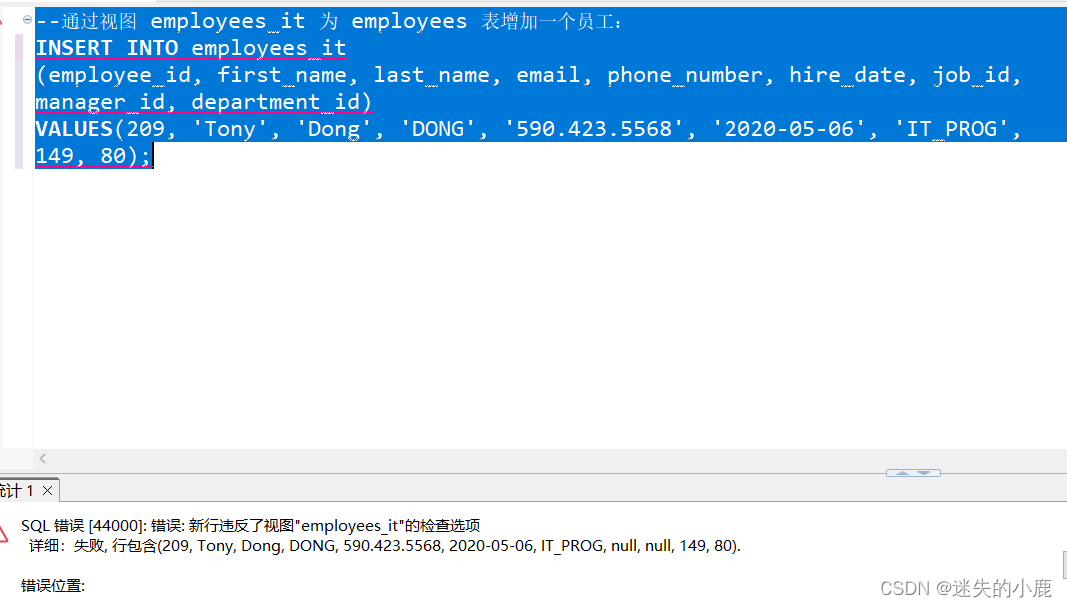
postgresql-视图
postgresql-视图 视图概述使用视图的好处 创建视图修改视图删除视图递归视图可更新视图WITH CHECK OPTION 视图概述 视图(View)本质上是一个存储在数据库中的查询语句。视图本身不包含数据,也被称为 虚拟表。我们在创建视图时给它指定了一个…...

科技资讯|Vision Pro头显无损音频仅限USB-C AirPods Pro 2耳机
彭博社的马克・古尔曼在最新发布的推文中表示,苹果 Vision Pro 头显的无损音频仅限于 USB-C AirPods Pro 2 耳机。 新款采用 USB-C 的 AirPods Pro 2 升级到了 IP54 级别(原版不防尘,仅 IPX4 级抗水),可陪伴用户在恶劣…...
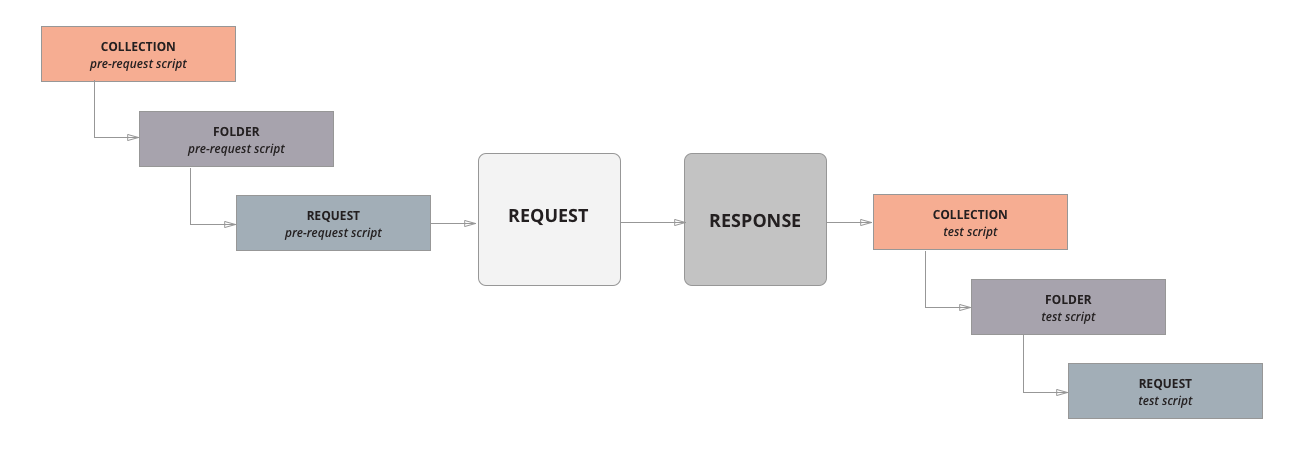
Postman应用——初步了解postman
Postman 是一个用于构建和使用 API 的 API 平台,Postman 简化了 API 生命周期的每个步骤并简化了协作,可以更快地创建更好的 API。 Postman 包含一个基于Node.js的强大的运行时,允许您向请求(request)和分组ÿ…...

分析报告显示,PHP是编程语言主力军,且在电商领域占据“统治地位”
日前有有业内专家透露了PHP语言的使用数据,并强调了PHP语言对于互联网的作用。 而根据W3 Techs发布的《全球前1000万个网站使用的编程语言分析(截至 2023.8)》中,有这样一组数据引起广泛的关注。PHP占比 77.2%、ASP占比 6.9%、Ruby 占比5.4%。 此外&am…...
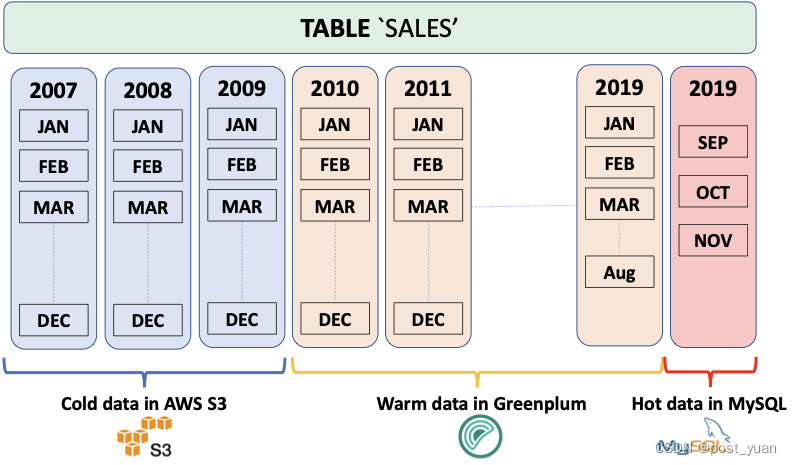
关于Greenplum Platform Extension Framework(PXF)
本文翻译自 https://docs.vmware.com/en/VMware-Greenplum-Platform-Extension-Framework/6.6/greenplum-platform-extension-framework/overview_pxf.html 随着数据存储和云服务的爆炸式增长,数据现在以各种格式驻留在许多不同的系统中。通常,数据根据…...

编程获取图像中的圆半径
版权声明:本文为博主原创文章,转载请在显著位置标明本文出处以及作者网名,未经作者允许不得用于商业目的。 即将推出EmguCV的教程,请大家还稍作等待。 之前网友咨询如何获得图像中圆形的半径,其中有两个十字作为标定…...

什么是Scrum?如何实施Scrum(敏捷开发)以及敏捷工具
什么是Scrum? Scrum是一个敏捷开发框架,它是一个增量的、迭代的开发过程。它被广泛应用于敏捷软件开发,在Scrum中,开发过程由若干个短的迭代周期组成,每个迭代周期称为一个Sprint。 那么Scrum如何实施呢…...

提升运营效率:仓储可视化的实时监控与优化
当今,仓储管理已经不再是简单的储存和分发商品的过程。随着供应链的复杂性增加,企业需要更高效的方式来管理和优化其仓储运营。在这个背景下,仓储可视化成为了一项关键的技术,它利用先进的数字化工具和数据分析来提升仓储管理的效…...
)
代理模式和单一职责原理一文读懂(设计模式与开发实践 P6)
文章目录 代理模式实现保护代理虚拟代理单一职责原理代理和本体 - 接口一致性虚拟代理 - 合并请求缓存代理其他代理 代理模式 定义:为一个对象提供一个代用品 & 占位符,以便 控制对他的访问 关键:不方便直接访问某个对象或不满足需要的时…...
Linux网络编程|TCP编程
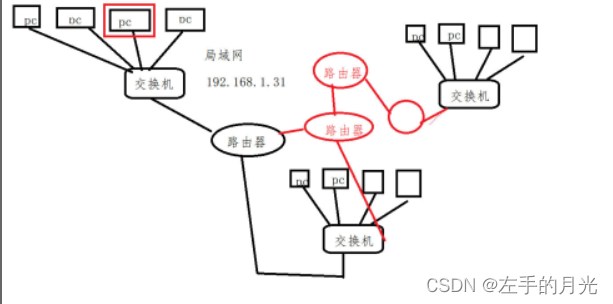
一.网络基础 1.1网络发展史 Internet-“冷战”的产物 1957年10月和11月,前苏联先后有两颗“Sputnik”卫星上天 1958年美国总统艾森豪威尔向美国国会提出建立DARPA (Defense Advanced Research Project Agency),即国防部高级研究计划署&#…...
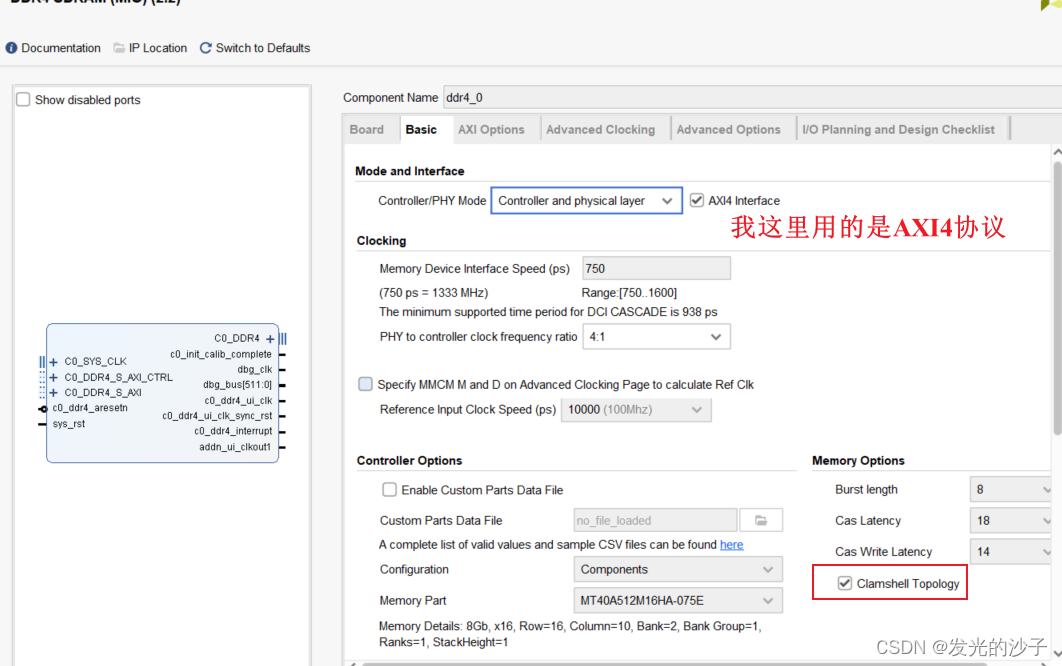
FPGA----VCU128的DDR4无法使用问题(全网唯一)
1、在Vivado 2019.1版本中使用DDR4的IP核会遇到如下图所示的错误,即便过了implementation生成了bit,DDR4也无法正常启动。 2、解决办法,上xilinx社区搜一下就知道了 AMD Customer Communityhttps://support.xilinx.com/s/article/69035?lan…...
)
从测速到配置:一套完整的cFosSpeed网络加速保姆级教程(适用于小白)
从零开始掌握cFosSpeed:网络加速全流程实战指南对于经常进行在线游戏、视频会议或大文件传输的用户来说,网络延迟和带宽利用率低下往往是影响体验的关键痛点。cFosSpeed作为一款专业的网络流量优化工具,能够显著改善这些问题,但许…...

浅聊26上半年软考架构师
2026年上半年架构师考试已然落幕,大家都考的如何?架构师共有三门考试,上午综合知识(75道选择题)案例分析,时间为8.30-12.30;下午论文,时间为14.30-16.30。下面说说我整体的备考过程。…...

雪球网md5__1038参数逆向解析与Node.js复现
1. 这不是“破解”,而是对前端加密逻辑的常规逆向还原你打开雪球网任意一只股票详情页,F12 打开开发者工具,切到 Network 面板,刷新页面——很快就能在 XHR 请求里捕获到类似这样的接口:https://xueqiu.com/stock/cube…...

Taotoken如何帮助教育科技产品实现个性化学习辅导
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken如何帮助教育科技产品实现个性化学习辅导 1. 场景与挑战 教育科技公司在开发个性化学习助手时,常常面临一个核…...

WarcraftHelper终极指南:深度解析魔兽争霸III现代化兼容性解决方案
WarcraftHelper终极指南:深度解析魔兽争霸III现代化兼容性解决方案 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper WarcraftHelper是一款专…...

OpenCore Legacy Patcher完全指南:3步让旧款Mac焕发新生的终极方案
OpenCore Legacy Patcher完全指南:3步让旧款Mac焕发新生的终极方案 【免费下载链接】OpenCore-Legacy-Patcher Experience macOS just like before 项目地址: https://gitcode.com/GitHub_Trending/op/OpenCore-Legacy-Patcher 你是否拥有一台性能尚可但已被…...

JWT弱密钥爆破实战:从HS256签名原理到CTF权限提升
1. 这不是密码学考试,而是一场“密钥猜谜”实战JWT(JSON Web Token)在现代Web系统中早已不是可选项,而是默认配置。登录成功后返回一串形如eyJhbGciOiJIUzI1NiIsInR5cCI6IkpXVCJ9.eyJ1c2VyX2lkIjoxMjMsIm5hbWUiOiLnlKjliYkiLCJpYX…...

基于MAX78000的边缘AI语音识别:从模型训练到嵌入式部署实战
1. 项目概述与核心思路最近在捣鼓一个挺有意思的小项目,我把它叫做“声控转向控制器”。简单来说,这玩意儿能听懂你说的几个特定单词,比如“左转”、“右转”、“前进”、“后退”,然后控制对应的LED灯亮起。你可能会想࿰…...

Win11Debloat:Windows系统精简与隐私保护的专业解决方案
Win11Debloat:Windows系统精简与隐私保护的专业解决方案 【免费下载链接】Win11Debloat A simple, lightweight PowerShell script that allows you to remove pre-installed apps, disable telemetry, as well as perform various other changes to declutter and …...
3步高效解决TranslucentTB任务栏透明化难题:完整配置指南
3步高效解决TranslucentTB任务栏透明化难题:完整配置指南 【免费下载链接】TranslucentTB A lightweight utility that makes the Windows taskbar translucent/transparent. 项目地址: https://gitcode.com/gh_mirrors/tr/TranslucentTB 你是否厌倦了Window…...