ROS2-IRON Ubuntu-22.0 源码下载失败解决方法 vcs import --input
ROS2
- 一.ROS2 IRON环境搭建
- 1.设置系统字符集为UTF-8
- 2.将RO2 apt 库添加到系统中
- 3.添加ROS2 GPG key
- 4.添加ROS 2 的软件源
- 安装开发工具
- 二.下载ROS2sh源代码
- 编译
一.ROS2 IRON环境搭建
虚拟机系统:Ubuntu22.04
虚拟机:VMware-player-full-16.2.5-20904516 (这个是非商用就可以免费使用的哦)
电脑系统:WIN10
以下操作都是在虚拟机下的Ubuntu22.04环境中。
详细步骤参考ROS2官网:
1.设置系统字符集为UTF-8
locale # check for UTF-8sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8locale # verify settings
2.将RO2 apt 库添加到系统中
sudo apt install software-properties-common
sudo add-apt-repository universe
3.添加ROS2 GPG key
sudo apt update && sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
4.添加ROS 2 的软件源
这个命令的作用是将 ROS 2 的软件源添加到/etc/apt/sources.list.d/ros2.list 文件中。这样系统就可以从这个源中获取 ROS 2 相关的软件包。
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
安装开发工具
sudo apt update && sudo apt install -y \python3-flake8-docstrings \python3-pip \python3-pytest-cov \python3-flake8-blind-except \python3-flake8-builtins \python3-flake8-class-newline \python3-flake8-comprehensions \python3-flake8-deprecated \python3-flake8-import-order \python3-flake8-quotes \python3-pytest-repeat \python3-pytest-rerunfailures \ros-dev-tools
二.下载ROS2sh源代码
创建ros2_iron/src目录,并下载相关源码。
mkdir -p ~/ros2_iron/src
cd ~/ros2_iron
vcs import --input https://raw.githubusercontent.com/ros2/ros2/iron/ros2.repos src
这一步我尝试了很多方法,各种换源。但是因为电脑不能翻墙的原因,一直下失败。我的解决方法是在浏览器中访问
https://raw.githubusercontent.com/ros2/ros2/iron/ros2.repos
可以看到以下信息:
repositories:ament/ament_cmake:type: giturl: https://github.com/ament/ament_cmake.gitversion: ironament/ament_index:type: giturl: https://github.com/ament/ament_index.gitversion: ironament/ament_lint:type: giturl: https://github.com/ament/ament_lint.gitversion: ironament/ament_package:type: giturl: https://github.com/ament/ament_package.gitversion: ironament/google_benchmark_vendor:type: giturl: https://github.com/ament/google_benchmark_vendor.gitversion: ironament/googletest:type: giturl: https://github.com/ament/googletest.gitversion: ironament/uncrustify_vendor:type: giturl: https://github.com/ament/uncrustify_vendor.gitversion: ironeProsima/Fast-CDR:type: giturl: https://github.com/eProsima/Fast-CDR.gitversion: v1.0.27eProsima/Fast-DDS:type: giturl: https://github.com/eProsima/Fast-DDS.gitversion: 2.10.xeProsima/foonathan_memory_vendor:type: giturl: https://github.com/eProsima/foonathan_memory_vendor.gitversion: mastereclipse-cyclonedds/cyclonedds:type: giturl: https://github.com/eclipse-cyclonedds/cyclonedds.gitversion: releases/0.10.xeclipse-iceoryx/iceoryx:type: giturl: https://github.com/eclipse-iceoryx/iceoryx.gitversion: release_2.0gazebo-release/gz_cmake2_vendor:type: giturl: https://github.com/gazebo-release/gz_cmake2_vendor.gitversion: irongazebo-release/gz_math6_vendor:type: giturl: https://github.com/gazebo-release/gz_math6_vendor.gitversion: ironosrf/osrf_pycommon:type: giturl: https://github.com/osrf/osrf_pycommon.gitversion: masterosrf/osrf_testing_tools_cpp:type: giturl: https://github.com/osrf/osrf_testing_tools_cpp.gitversion: ironros-perception/image_common:type: giturl: https://github.com/ros-perception/image_common.gitversion: ironros-perception/laser_geometry:type: giturl: https://github.com/ros-perception/laser_geometry.gitversion: ironros-planning/navigation_msgs:type: giturl: https://github.com/ros-planning/navigation_msgs.gitversion: ironros-tooling/keyboard_handler:type: giturl: https://github.com/ros-tooling/keyboard_handler.gitversion: ironros-tooling/libstatistics_collector:type: giturl: https://github.com/ros-tooling/libstatistics_collector.gitversion: ironros-visualization/interactive_markers:type: giturl: https://github.com/ros-visualization/interactive_markers.gitversion: ironros-visualization/python_qt_binding:type: giturl: https://github.com/ros-visualization/python_qt_binding.gitversion: ironros-visualization/qt_gui_core:type: giturl: https://github.com/ros-visualization/qt_gui_core.gitversion: ironros-visualization/rqt:type: giturl: https://github.com/ros-visualization/rqt.gitversion: ironros-visualization/rqt_action:type: giturl: https://github.com/ros-visualization/rqt_action.gitversion: ironros-visualization/rqt_bag:type: giturl: https://github.com/ros-visualization/rqt_bag.gitversion: ironros-visualization/rqt_console:type: giturl: https://github.com/ros-visualization/rqt_console.gitversion: ironros-visualization/rqt_graph:type: giturl: https://github.com/ros-visualization/rqt_graph.gitversion: ironros-visualization/rqt_msg:type: giturl: https://github.com/ros-visualization/rqt_msg.gitversion: ironros-visualization/rqt_plot:type: giturl: https://github.com/ros-visualization/rqt_plot.gitversion: ironros-visualization/rqt_publisher:type: giturl: https://github.com/ros-visualization/rqt_publisher.gitversion: ironros-visualization/rqt_py_console:type: giturl: https://github.com/ros-visualization/rqt_py_console.gitversion: ironros-visualization/rqt_reconfigure:type: giturl: https://github.com/ros-visualization/rqt_reconfigure.gitversion: ironros-visualization/rqt_service_caller:type: giturl: https://github.com/ros-visualization/rqt_service_caller.gitversion: ironros-visualization/rqt_shell:type: giturl: https://github.com/ros-visualization/rqt_shell.gitversion: ironros-visualization/rqt_srv:type: giturl: https://github.com/ros-visualization/rqt_srv.gitversion: ironros-visualization/rqt_topic:type: giturl: https://github.com/ros-visualization/rqt_topic.gitversion: ironros-visualization/tango_icons_vendor:type: giturl: https://github.com/ros-visualization/tango_icons_vendor.gitversion: ironros/class_loader:type: giturl: https://github.com/ros/class_loader.gitversion: ironros/kdl_parser:type: giturl: https://github.com/ros/kdl_parser.gitversion: ironros/pluginlib:type: giturl: https://github.com/ros/pluginlib.gitversion: ironros/resource_retriever:type: giturl: https://github.com/ros/resource_retriever.gitversion: ironros/robot_state_publisher:type: giturl: https://github.com/ros/robot_state_publisher.gitversion: ironros/ros_environment:type: giturl: https://github.com/ros/ros_environment.gitversion: ironros/ros_tutorials:type: giturl: https://github.com/ros/ros_tutorials.gitversion: ironros/urdfdom:type: giturl: https://github.com/ros/urdfdom.gitversion: ironros/urdfdom_headers:type: giturl: https://github.com/ros/urdfdom_headers.gitversion: ironros2/ament_cmake_ros:type: giturl: https://github.com/ros2/ament_cmake_ros.gitversion: ironros2/common_interfaces:type: giturl: https://github.com/ros2/common_interfaces.gitversion: ironros2/console_bridge_vendor:type: giturl: https://github.com/ros2/console_bridge_vendor.gitversion: ironros2/demos:type: giturl: https://github.com/ros2/demos.gitversion: ironros2/eigen3_cmake_module:type: giturl: https://github.com/ros2/eigen3_cmake_module.gitversion: ironros2/example_interfaces:type: giturl: https://github.com/ros2/example_interfaces.gitversion: ironros2/examples:type: giturl: https://github.com/ros2/examples.gitversion: ironros2/geometry2:type: giturl: https://github.com/ros2/geometry2.gitversion: ironros2/launch:type: giturl: https://github.com/ros2/launch.gitversion: ironros2/launch_ros:type: giturl: https://github.com/ros2/launch_ros.gitversion: ironros2/libyaml_vendor:type: giturl: https://github.com/ros2/libyaml_vendor.gitversion: ironros2/message_filters:type: giturl: https://github.com/ros2/message_filters.gitversion: ironros2/mimick_vendor:type: giturl: https://github.com/ros2/mimick_vendor.gitversion: ironros2/orocos_kdl_vendor:type: giturl: https://github.com/ros2/orocos_kdl_vendor.gitversion: ironros2/performance_test_fixture:type: giturl: https://github.com/ros2/performance_test_fixture.gitversion: ironros2/pybind11_vendor:type: giturl: https://github.com/ros2/pybind11_vendor.gitversion: ironros2/python_cmake_module:type: giturl: https://github.com/ros2/python_cmake_module.gitversion: ironros2/rcl:type: giturl: https://github.com/ros2/rcl.gitversion: ironros2/rcl_interfaces:type: giturl: https://github.com/ros2/rcl_interfaces.gitversion: ironros2/rcl_logging:type: giturl: https://github.com/ros2/rcl_logging.gitversion: ironros2/rclcpp:type: giturl: https://github.com/ros2/rclcpp.gitversion: ironros2/rclpy:type: giturl: https://github.com/ros2/rclpy.gitversion: ironros2/rcpputils:type: giturl: https://github.com/ros2/rcpputils.gitversion: ironros2/rcutils:type: giturl: https://github.com/ros2/rcutils.gitversion: ironros2/realtime_support:type: giturl: https://github.com/ros2/realtime_support.gitversion: ironros2/rmw:type: giturl: https://github.com/ros2/rmw.gitversion: ironros2/rmw_connextdds:type: giturl: https://github.com/ros2/rmw_connextdds.gitversion: ironros2/rmw_cyclonedds:type: giturl: https://github.com/ros2/rmw_cyclonedds.gitversion: ironros2/rmw_dds_common:type: giturl: https://github.com/ros2/rmw_dds_common.gitversion: ironros2/rmw_fastrtps:type: giturl: https://github.com/ros2/rmw_fastrtps.gitversion: ironros2/rmw_implementation:type: giturl: https://github.com/ros2/rmw_implementation.gitversion: ironros2/ros2_tracing:type: giturl: https://github.com/ros2/ros2_tracing.gitversion: ironros2/ros2cli:type: giturl: https://github.com/ros2/ros2cli.gitversion: ironros2/ros2cli_common_extensions:type: giturl: https://github.com/ros2/ros2cli_common_extensions.gitversion: ironros2/ros_testing:type: giturl: https://github.com/ros2/ros_testing.gitversion: ironros2/rosbag2:type: giturl: https://github.com/ros2/rosbag2.gitversion: ironros2/rosidl:type: giturl: https://github.com/ros2/rosidl.gitversion: ironros2/rosidl_core:type: giturl: https://github.com/ros2/rosidl_core.gitversion: ironros2/rosidl_dds:type: giturl: https://github.com/ros2/rosidl_dds.gitversion: ironros2/rosidl_defaults:type: giturl: https://github.com/ros2/rosidl_defaults.gitversion: ironros2/rosidl_dynamic_typesupport:type: giturl: https://github.com/ros2/rosidl_dynamic_typesupportversion: ironros2/rosidl_dynamic_typesupport_fastrtps:type: giturl: https://github.com/ros2/rosidl_dynamic_typesupport_fastrtpsversion: ironros2/rosidl_python:type: giturl: https://github.com/ros2/rosidl_python.gitversion: ironros2/rosidl_runtime_py:type: giturl: https://github.com/ros2/rosidl_runtime_py.gitversion: ironros2/rosidl_typesupport:type: giturl: https://github.com/ros2/rosidl_typesupport.gitversion: ironros2/rosidl_typesupport_fastrtps:type: giturl: https://github.com/ros2/rosidl_typesupport_fastrtps.gitversion: ironros2/rpyutils:type: giturl: https://github.com/ros2/rpyutils.gitversion: ironros2/rviz:type: giturl: https://github.com/ros2/rviz.gitversion: ironros2/spdlog_vendor:type: giturl: https://github.com/ros2/spdlog_vendor.gitversion: ironros2/sros2:type: giturl: https://github.com/ros2/sros2.gitversion: ironros2/system_tests:type: giturl: https://github.com/ros2/system_tests.gitversion: ironros2/test_interface_files:type: giturl: https://github.com/ros2/test_interface_files.gitversion: ironros2/tinyxml2_vendor:type: giturl: https://github.com/ros2/tinyxml2_vendor.gitversion: ironros2/tinyxml_vendor:type: giturl: https://github.com/ros2/tinyxml_vendor.gitversion: ironros2/tlsf:type: giturl: https://github.com/ros2/tlsf.gitversion: ironros2/unique_identifier_msgs:type: giturl: https://github.com/ros2/unique_identifier_msgs.gitversion: ironros2/urdf:type: giturl: https://github.com/ros2/urdf.gitversion: ironros2/yaml_cpp_vendor:type: giturl: https://github.com/ros2/yaml_cpp_vendor.gitversion: iron
url对应的就是github上所在的源代码。把github上的这些源代码仓库转移到gitee上,这个gitee提供了这一部分的功能。
在ros2_iron路径下,用vim新建ros2.repos文件。
vim ros2.repos
vim 在normal模式下,输入"+p将https://raw.githubusercontent.com/ros2/ros2/iron/ros2.repos中的内容复制到本地(前提是已经复制到系统内存中了,才能使用这个命令)。用vim查找替换url地址。
:%s/https\/\/github.com\/\(.*\)\//gitee.com:makuswork\//g
这样本地中ros2.repos中的url中的内容全部修改成我自己的gitee仓库中了。我把地址改成了ssh的通信。下载源代码时就不用一直的输入帐号和密码了。保存关闭。
在ros2_iron路径下
vcs import --input ros2.repos src


编译
sudo apt upgrade
sudo rosdep init
rosdep update
rosdep install --from-paths src --ignore-src -y --skip-keys "fastcdr rti-connext-dds-6.0.1 urdfdom_headers"
colcon build --symlink-install
如果编译报错,EasyInstallDeprecationWarning,可以参考colcon build --symlink-install ,编译失败解决方法
相关文章:
ROS2-IRON Ubuntu-22.0 源码下载失败解决方法 vcs import --input
ROS2 一.ROS2 IRON环境搭建1.设置系统字符集为UTF-82.将RO2 apt 库添加到系统中3.添加ROS2 GPG key4.添加ROS 2 的软件源安装开发工具 二.下载ROS2sh源代码编译 一.ROS2 IRON环境搭建 虚拟机系统:Ubuntu22.04 虚拟机:VMware-player-full-16.2.5-2090451…...

百度SEO优化技巧大揭秘(百度SEO优化策略,提升网站排名)
百度SEO优化策略介绍 作为全球最大的中文搜索引擎,百度的优化是各大网站的重中之重。首先,网站内容是关键,要确保内容原创、有价值、符合用户需求。其次,合理设置页面标题、关键词、描述等元素。还要注意网站结构,合理…...
JavaScript:二进制数组【笔记】
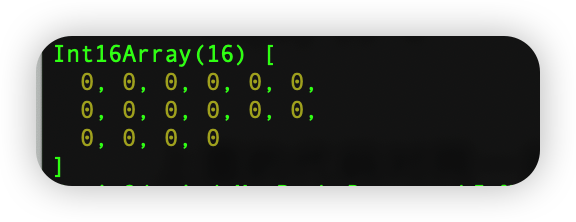
二进制数组【ArrayBuffer对象、Type的Array视图和DataView视图】JavaScript操作二进制数据的一个接口。 这些接口原本是和WebGL有关【WebGL是浏览器与显卡之间的通信接口】,为了满足JavaScript与显卡之间大量、实时数据交换,那么JavaScript和显卡之间的…...

华为云认证考试包含哪些内容?
华为云计算认证考试包含哪些内容?华为云计算认证涵盖了hcia、HCIP、HCIE三个级别的认证。HCIA云计算方向只要考一门笔试,考试覆盖基础通识知识、虚拟化FusionCompute、桌面云FusionAccess、云计算发展趋势共四大模块知识点,包括云计算概述、服…...
进程程序替换
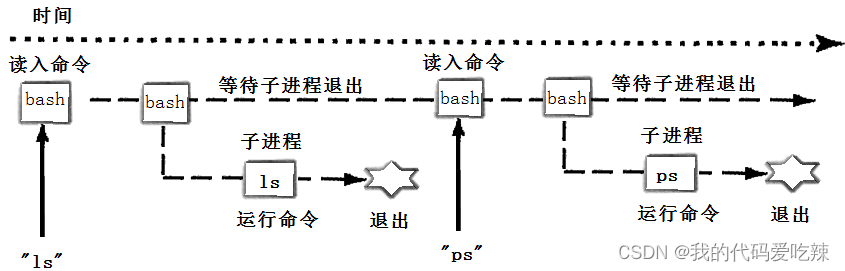
✅<1>主页::我的代码爱吃辣 📃<2>知识讲解:Linux——进程替换 ☂️<3>开发环境:Centos7 💬<4>前言:我们创建子进程的目的是什么?想让子进程帮我们执行特定的…...
理解HTTPS/TLS/SSL(二)可视化TLS握手过程并解密加密数据
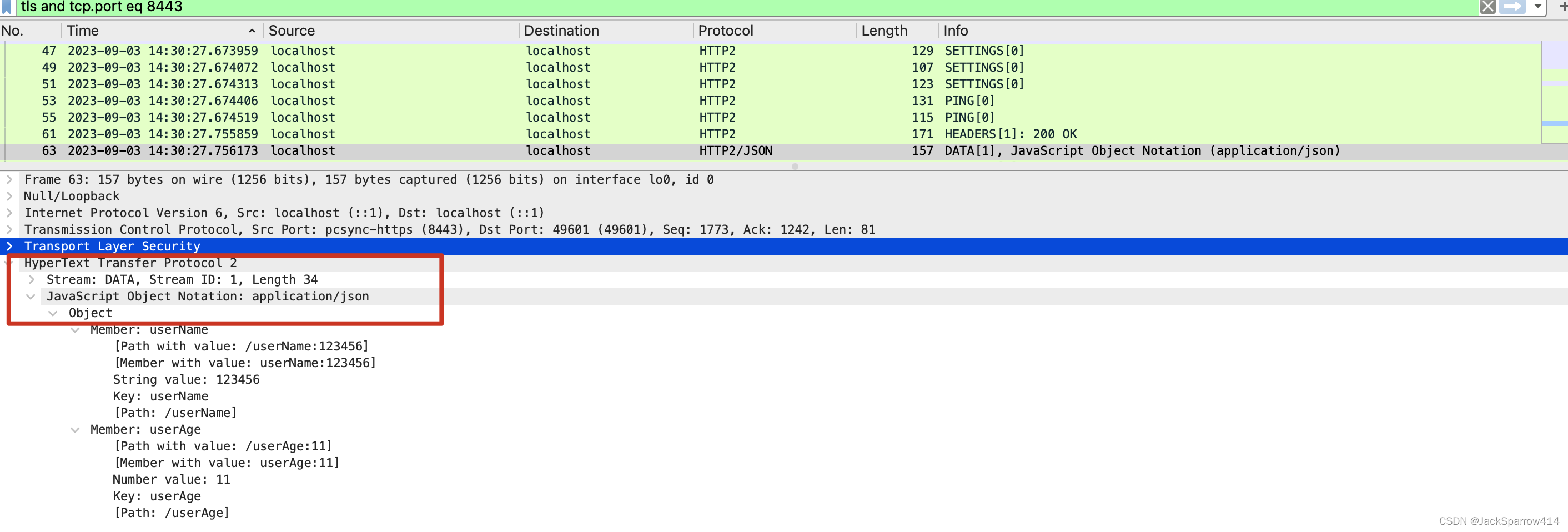
文章目录 WireShark抓包TLS握手过程Client HelloServer HelloEncryped Extenstions, Certificate, Certificate VerifyChange Ciper Spec, FinshedTLS 1.2和TLS 1.3的区别能不能在进一步? 解密WireShark中抓到的TLS包参考资料 上一篇文章已经在本地使用了生成自签名…...

一文详解TCP三次握手四次挥手
文章目录 TCP的三次握手和四次挥手三次握手四次挥手 TCP的三次握手和四次挥手 基本概念 SYN(Synchronize Sequence Numbers,同步序列数字):用于建立连接的同步信号。 SYN 序列号的作用是用于标识每个数据包中的字节流的起始位置。…...
PDF怎么转图片?四种转换方法分享
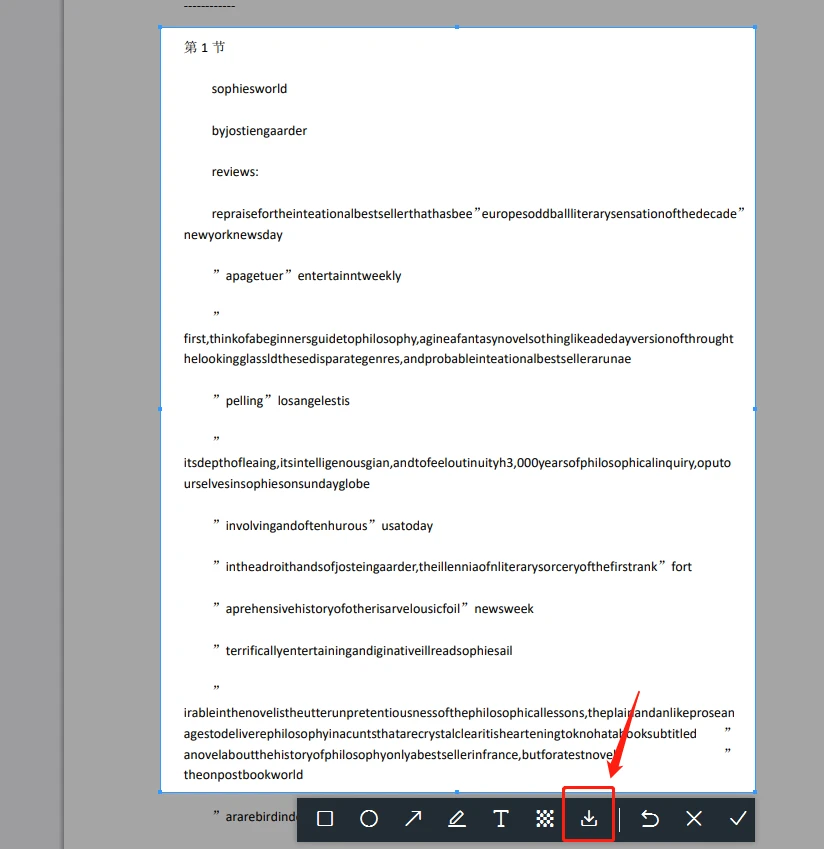
PDF文件是一种非常常见的文档格式,然而,有时候我们需要将PDF文件转换成图片格式。比如我们可能需要将PDF文件中的某些页面或图表转换成图片格式以便于编辑或分享。在这篇文章中,我们将介绍四种将PDF文件转换成图片的方法。 方法一:…...

华为OD机试 - 压缩报文还原 - 正则表达式(Java 2023 B卷 100分)
目录 专栏导读一、题目描述二、输入描述三、输出描述四、解题思路五、Java算法源码六、效果展示1、输入2、输出3、说明 华为OD机试 2023B卷题库疯狂收录中,刷题点这里 专栏导读 本专栏收录于《华为OD机试(JAVA)真题(A卷B卷&#…...
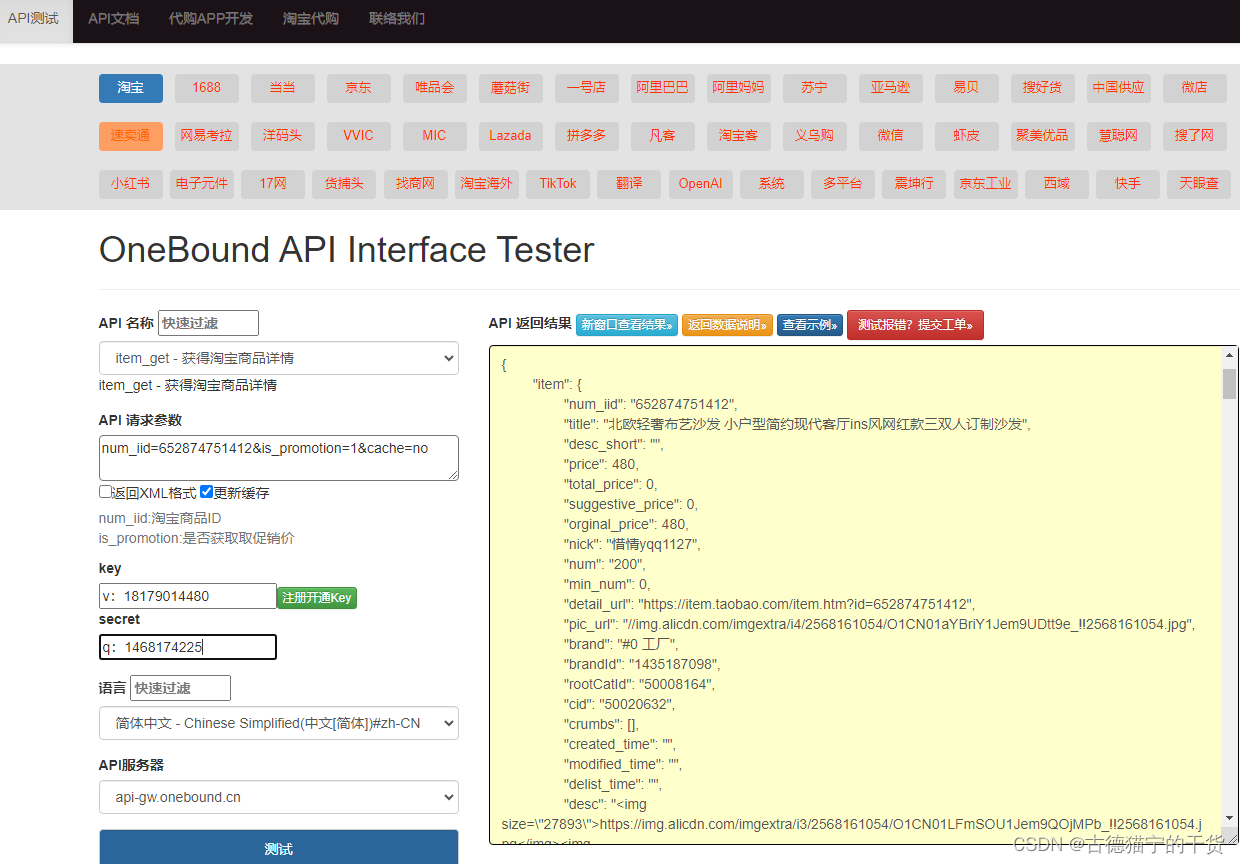
电商API的应用价值:淘宝1688京东API接口系列
API接口是一种软件应用程序,它充当两个不同软件应用程序之间的中介。它帮助不同的应用程序相互通信,共享数据,从而使用户能够完成不同的任务。API接口的用途非常广泛,下面是一些常见的用途: 数据共享:API接…...

day38 代码回想录 斐波那契数爬楼梯使用最小花费爬楼梯
大纲 ● 理论基础 ● 509. 斐波那契数 ● 70. 爬楼梯 ● 746. 使用最小花费爬楼梯 509. 斐波那契数 题目:509. 斐波那契数 // 斐波那契数列 // 动规 5部曲 // 1 dp[i]代表i处的斐波那契值 // 2 递归公式:dp[0] 0, dp[1]1, dp[i]dp[i-1]dp[i-2] // 3…...
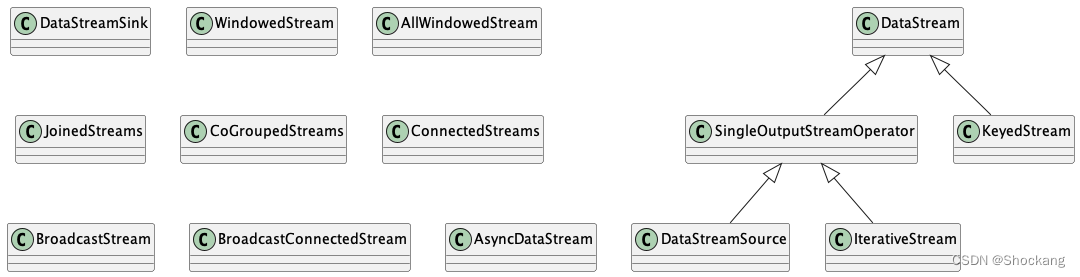
Flink DataStream 体系
前言 本文隶属于专栏《大数据技术体系》,该专栏为笔者原创,引用请注明来源,不足和错误之处请在评论区帮忙指出,谢谢! 本专栏目录结构和参考文献请见大数据技术体系 思维导图 正文 对 Flink 这种以流为核心的分布式计…...
Linux的调试工具 - gdb(超详细)
Linux的调试工具 - gdb 1. 背景2. 开始使用指令的使用都用下面这个C语言简单小代码来进行演示:1. list或l 行号:显示文件源代码,接着上次的位置往下列,每次列10行。2. list或l 函数名:列出某个函数的源代码。3. r或run: 运行程序。…...

已知平面内三点,求其平面的法向量
三点平面法向量 设三点坐标为A(x1,y1,z1),B(x2,y2,z2),C(x3,y3,z3) 向量AB(x2-x1,y2-y1,z2-z1),AC(x3-x1,y3-y1,z3-z1) AB、AC所在平面的法向量即ABAC(a,b,c),其中: a(y2-y1)(z3-z1)-(z2-z1)(y3-y1) b(z2-z1)(x3-x1)-(z3-z1)(x2-x1) c(x2-x1)(y3-y1)-(x3-x1)(y2-y1)…...
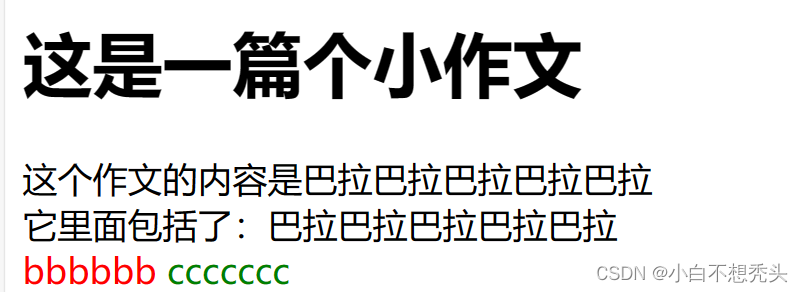
HTML
HTML 1.HTML结构 1.1认识HTML HTML是超文本标记语言,电脑上看到的所有网站都是html实现的 HTML代码是“标签”构成的,简单来说,html就是一堆标签的组合 形如 <body>hello</body>标签名 (body) 放到 < > 中 大部分标签成…...
和最大子数组和算法(如Kadane算法)应用拓展案例)
Java手写最大子数组和算法(如Kadane算法)和最大子数组和算法(如Kadane算法)应用拓展案例
Java手写最大子数组和算法(如Kadane算法)和最大子数组和算法(如Kadane算法)应用拓展案例 1. 算法思维导图 以下是使用mermaid代码表示的Kadane算法的实现原理: #mermaid-svg-rI7hVAVsP1qtjZK7 {font-family:"tr…...

掌握NVM、NRM和NPM:Node.js开发的利器
**掌握NVM、NRM和NPM:Node.js开发的利器** 背景介绍:如何使用NVM:在Windows上安装NVM:在macOS上安装NVM:配置NVM:常用NVM命令: 如何使用NRM:安装NRM:配置全局NRM…...

Nacos 2.2.3 部署到linux
到https://github.com/alibaba/nacos/releases 下载编译后压缩包,如nacos-server-2.2.3.tar.gz这种,里面包含有nacos的jar包,不然启动不了 1.新建并初始化数据库 创建nacos数据库,执行mysql-schema.sql文件,这个文件…...
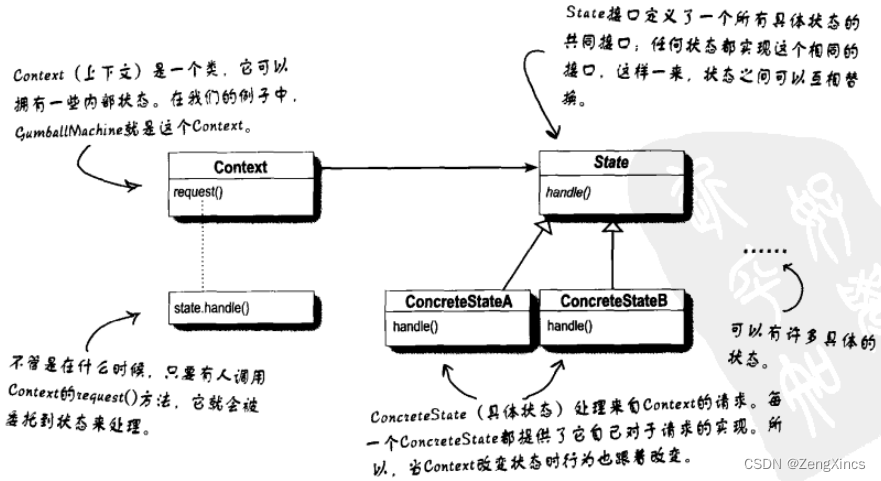
设计模式之十:状态模式
状态模式通过改变对象内部的状态来帮助对象控制自己的行为。 这是一张状态图,其中每个圆圈都是一个状态。 最简单,第一反应的实现就是使用一个变量来控制状态值,并在方法内书写条件代码来处理不同情况。 package headfirst.designpatterns.…...
基本使用指南)
Python 的运算符和语句(条件、循环、异常)基本使用指南
运算符的分类 算数运算符赋值运算符复合赋值运算符比较运算符逻辑运算符 算数运算符 运算符描述实例加1 1 输出结果为 2-减1 - 1 输出结果为 0*乘2 * 2 输出结果为 4/除10 / 2 输出结果为 5//整除9 // 4 输出结果为 2%取余9 % 4 输出结果为 1**指数2 ** 4 输出结果为 16&…...

10分钟精通Captura:从注册到首次录制的无缝体验优化指南
10分钟精通Captura:从注册到首次录制的无缝体验优化指南 【免费下载链接】Captura Capture Screen, Audio, Cursor, Mouse Clicks and Keystrokes 项目地址: https://gitcode.com/gh_mirrors/ca/Captura Captura是一款功能强大的屏幕录制工具,能够…...

IndexTTS-2-LLM与VITS对比:大语言模型TTS谁更适合企业落地
IndexTTS-2-LLM与VITS对比:大语言模型TTS谁更适合企业落地 1. 引言:企业语音合成的选择难题 在智能语音技术快速发展的今天,企业面临着众多语音合成方案的选择。传统的TTS系统虽然成熟稳定,但在自然度和表现力上往往有所欠缺。而…...

Bidili Generator部署案例:高校AI实验室SDXL教学平台本地化部署实践
Bidili Generator部署案例:高校AI实验室SDXL教学平台本地化部署实践 1. 项目背景与需求 最近,我协助一所高校的AI实验室搭建了一套用于教学的图片生成平台。实验室负责人告诉我,他们之前尝试过一些在线AI绘画工具,但遇到了几个头…...

ClawdBot语音处理:Whisper tiny本地转写准确率与延迟实测
ClawdBot语音处理:Whisper tiny本地转写准确率与延迟实测 1. 引言:为什么关注本地语音转写? 想象一下这个场景:你在Telegram群里收到一条外语语音消息,想快速知道内容,但又不想把音频上传到云端ÿ…...

Ollama镜像高性能实践:AI股票分析师支持并发10+股票实时分析
Ollama镜像高性能实践:AI股票分析师支持并发10股票实时分析 1. 项目概述 AI股票分析师daily_stock_analysis是一个基于Ollama本地大模型框架构建的私有化金融分析应用。这个镜像的核心价值在于将专业级的股票分析能力本地化部署,让用户无需依赖外部API…...

着色器multi_compile笔记
概述一句multi_compile后面写若干个关键字XXX,在代码里用#if XXX条件编译一段代码。开启、关闭关键字关键字的开启关闭在材质debug界面。在Valid Keywords填的关键字如果在某句multi_compile里会自动进入Valid Keywords,否则进入Invalid。代码开启关键字…...

Qwen3-14b_int4_awq实操进阶:Chainlit中集成RAG模块调用本地知识库
Qwen3-14b_int4_awq实操进阶:Chainlit中集成RAG模块调用本地知识库 1. 模型与工具介绍 1.1 Qwen3-14b_int4_awq模型概述 Qwen3-14b_int4_awq是基于Qwen3-14b模型的int4量化版本,采用AngelSlim技术进行压缩优化。这个版本特别适合在资源有限的环境中部…...

Ollama生态融合:配置Phi-3-vision的Ollama版本实现更简易的本地运行
Ollama生态融合:配置Phi-3-vision的Ollama版本实现更简易的本地运行 1. 为什么选择Ollama运行Phi-3-vision 如果你正在寻找一种更简单的方式来本地运行Phi-3-vision这类视觉语言模型,Ollama可能是目前最友好的选择。它把模型管理变得像使用Docker一样简…...

Qwen3-ForcedAligner-0.6B企业应用:客服质检系统集成本地语音转写模块
Qwen3-ForcedAligner-0.6B企业应用:客服质检系统集成本地语音转写模块 1. 项目背景与价值 在客服质检领域,语音通话的准确转写和精细分析是提升服务质量的关键环节。传统方案往往依赖云端语音识别服务,存在数据安全风险、网络依赖性强、成本…...

Local Moondream2零基础上手:无Python经验也能玩转本地视觉AI
Local Moondream2零基础上手:无Python经验也能玩转本地视觉AI 让你的电脑真正拥有"眼睛",无需编程基础也能玩转AI视觉对话 1. 开篇:给电脑装上"智能眼睛" 你有没有想过,让电脑像人一样"看懂"图片&…...