games101 作业2
题目
光栅化一个三角形
1. 创建三角形的 2 维 bounding box。
2. 遍历此 bounding box 内的所有像素(使用其整数索引)。然后,使用像素中心的屏幕空间坐标来检查中心点是否在三角形内。
3. 如果在内部,则将其位置处的插值深度值 (interpolated depth value) 与深度缓冲区 (depth buffer) 中的相应值进行比较。
4. 如果当前点更靠近相机,请设置像素颜色并更新深度缓冲区 (depth buffer)。
题解
本次作业需要实现代码框架中的两个接口:
void rst::rasterizer::rasterize_triangle(const Triangle& t);
static bool insideTriangle(int x, int y, const Vector3f* _v);
1. 在2D空间中,计算一个三角形的轴对称boundbox
只需要计算出三角形的三个顶点坐标中,x最大最小值,y最大最小值。即 ( x m i n , y m i n ) , ( x m a x , y m a x ) (x_{min},y_{min}),(x_{max},y_{max}) (xmin,ymin),(xmax,ymax)
使用<math.h>库实现如下:
int xMin, yMin, xMax, yMax;xMin = std::floor(std::min(std::min(v[0].x(),v[1].x()),v[2].x()));yMin = std::floor(std::min(std::min(v[0].y(), v[1].y()), v[2].y()));xMax = std::ceil(std::max(std::max(v[0].x(), v[1].x()), v[2].x()));yMax = std::ceil(std::max(std::max(v[0].y(), v[1].y()), v[2].y()));
注意:顶点坐标都是浮点数,但是我们计算出的包围盒必须是整型。左上角下取整,右下角上去整。
2. 判断像素的中心点是否在三角形内部
其实方法有很多种,具体可以参考这个博客。
最常用最高效的有两种:重心坐标法和向量叉积。
本次作业选用向量叉积法:
代码如下
static bool insideTriangle(int x, int y, const Vector3f* _v)
{ // TODO : Implement this function to check if the point (x, y) is inside the triangle represented by _v[0], _v[1], _v[2]auto v0_v1 = _v[1] - _v[0];auto v1_v2 = _v[2] - _v[1];auto v2_v0 = _v[0] - _v[2];auto v0_P = Vector3f(x, y, _v[0].z()) - _v[0];auto v1_P = Vector3f(x, y, _v[1].z()) - _v[1];auto v2_P = Vector3f(x, y, _v[2].z()) - _v[2];auto v0pCross = v0_v1.cross(v0_P);auto v1pCross = v1_v2.cross(v1_P);auto v2pCross = v2_v0.cross(v2_P);if (v0pCross.dot(v1pCross) >= 0 && v0pCross.dot(v2pCross) >= 0)return true;return false;
}
因为我们判断的是一个像素的中心点是否在三角形内部,所以需要给x,y 分别加0.5,即insideTriangle(x+0.5,y+0.5,t.v)
注意:Vector3f Triangle::v[3] 中存放的就是三角形的三个顶点。
3.根据插值得到的深度值和深度缓冲的深度值比较。
插值运算使用代码框架,所以这块比较简单。
代码如下
for (int i = xMin; i <= xMax; i++){for (int j = yMin; j <= yMax; j++){if (insideTriangle(i+0.5f, j+0.5f,t.v)){auto[alpha, beta, gamma] = computeBarycentric2D(i, j, t.v);float w_reciprocal = 1.0/(alpha / v[0].w() + beta / v[1].w() + gamma / v[2].w());float z_interpolated = alpha * v[0].z() / v[0].w() + beta * v[1].z() / v[1].w() + gamma * v[2].z() / v[2].w();z_interpolated *= w_reciprocal;int index = get_index(i, j);if (depth_buf[index] > z_interpolated){depth_buf[index] = z_interpolated; // 更新深度缓冲区set_pixel(Vector3f(i,j,z_interpolated),t.getColor());}}}}
注意:如果当前z值小于深度缓冲区的深度值,一定要更新深度缓冲区。
结果
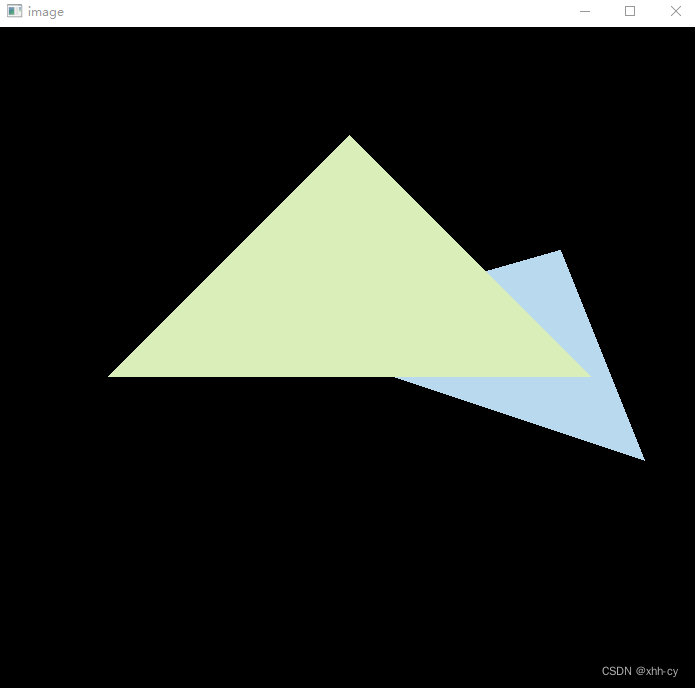
代码:
static bool insideTriangle(int x, int y, const Vector3f* _v)
{ // TODO : Implement this function to check if the point (x, y) is inside the triangle represented by _v[0], _v[1], _v[2]auto v0_v1 = _v[1] - _v[0];auto v1_v2 = _v[2] - _v[1];auto v2_v0 = _v[0] - _v[2];auto v0_P = Vector3f(x, y, _v[0].z()) - _v[0];auto v1_P = Vector3f(x, y, _v[1].z()) - _v[1];auto v2_P = Vector3f(x, y, _v[2].z()) - _v[2];auto v0pCross = v0_v1.cross(v0_P);auto v1pCross = v1_v2.cross(v1_P);auto v2pCross = v2_v0.cross(v2_P);if (v0pCross.dot(v1pCross) >= 0 && v0pCross.dot(v2pCross) >= 0)return true;return false;
}void rst::rasterizer::rasterize_triangle(const Triangle& t) {auto v = t.toVector4();int xMin, yMin, xMax, yMax;xMin = std::floor(std::min(std::min(v[0].x(),v[1].x()),v[2].x()));yMin = std::floor(std::min(std::min(v[0].y(), v[1].y()), v[2].y()));xMax = std::ceil(std::max(std::max(v[0].x(), v[1].x()), v[2].x()));yMax = std::ceil(std::max(std::max(v[0].y(), v[1].y()), v[2].y()));for (int i = xMin; i <= xMax; i++){for (int j = yMin; j <= yMax; j++){if (insideTriangle(i+0.5f, j+0.5f,t.v)){auto[alpha, beta, gamma] = computeBarycentric2D(i, j, t.v);float w_reciprocal = 1.0/(alpha / v[0].w() + beta / v[1].w() + gamma / v[2].w());float z_interpolated = alpha * v[0].z() / v[0].w() + beta * v[1].z() / v[1].w() + gamma * v[2].z() / v[2].w();z_interpolated *= w_reciprocal;int index = get_index(i, j);if (depth_buf[index] > z_interpolated){depth_buf[index] = z_interpolated;set_pixel(Vector3f(i,j, z_interpolated),t.getColor());}}}}
}参考文献
判断点是否在三角形内
相关文章:
games101 作业2
题目 光栅化一个三角形 1. 创建三角形的 2 维 bounding box。 2. 遍历此 bounding box 内的所有像素(使用其整数索引)。然后,使用像素中心的屏幕空间坐标来检查中心点是否在三角形内。 3. 如果在内部,则将其位置处的插值深度值 (…...

二叉树链式存储结构
目录 1.二叉树链式存储结构 2.二叉树的遍历 2.1 前、中、后序遍历 2.2 层序遍历 3.二叉树的其他递归问题 3.1 二叉树的结点个数 3.2 二叉树的叶子结点个数 3.3 二叉树第k层结点个数 3.4 二叉树的深度 3.5 二叉树查找 3.6 二叉树销毁 4.二叉树的基础OJ题 4.1 单值…...

Claude 使用指南 | 可与GPT-4媲美的语言模型
本文全程干货,让你轻松使用上claude,这也是目前体验cluade的唯一途径!废话不多说,直接上教程,cluade的能力不逊于GPT4,号称是ChatGPT4.0最强竞品。相对Chatgpt来说,Claude不仅是完全免费的&…...

【汇编】微处理器
【汇编】微处理器 文章目录 【汇编】微处理器1、微处理器概念1.1 关键词1.2 分类 2、微处理器结构2.1 寄存器2.2 寄存器&汇编助记符2.3 寄存器组成结构 3、地址空间3.1 存储空间3.1.1 虚拟空间(编程空间)3.1.2 线性空间 3.2 I/O空间 4、工作模式4.1 …...
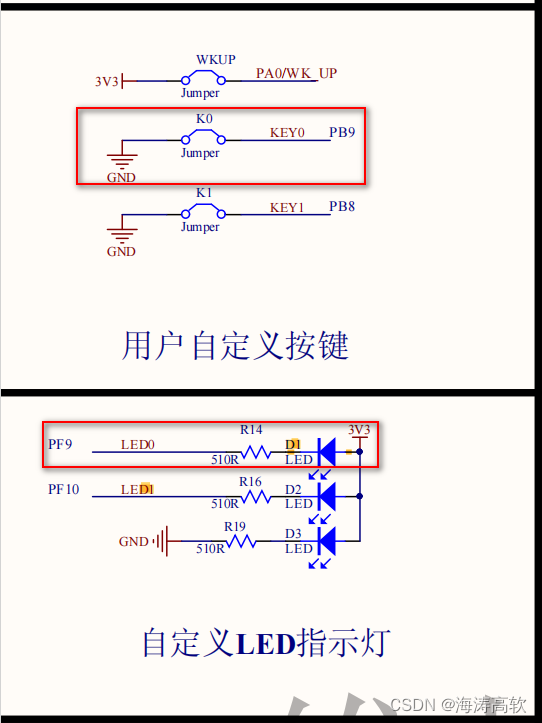
按键点亮led灯
原理图: K0这个按键按下时,开发板D1这个灯亮,松开,灯灭 代码如下: #include "stm32f4xx.h" void LED_Init(void) {//1.定义一个GPIO外设的结构体变量 GPIO_InitTypeDef GPIO_InitStructure;//RCC_AHB1PeriphClockCmd(RCC_AHB1Pe…...

Java常见面试题
目录 1、mysql并发事务会带来哪些问题,如何解决?2、请详细描述Redis持久化机制?3、简述Redis缓存雪崩和缓存穿透的问题和解决方案?4、RabbitMQ消息丢失及对应解决方案5、什么叫线程安全?举例说明6、举例说明常用的加密…...
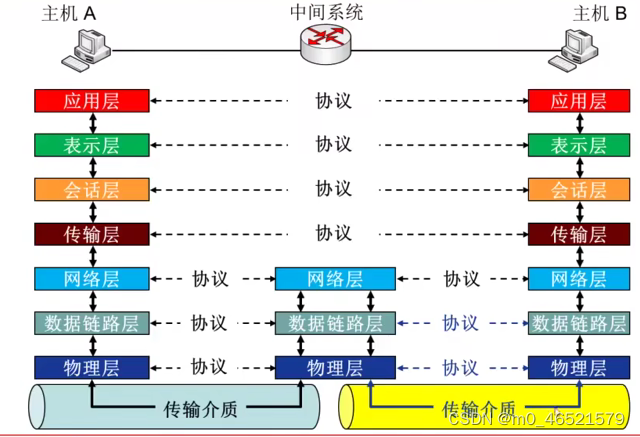
笔记1.5:计算机网络体系结构
从功能上描述计算机网络结构 分层结构 每层遵循某个网络协议完成本层功能 基本概念 实体:表示任何可发送或接收信息的硬件或软件进程。 协议是控制两个对等实体进行通信的规则的集合,协议是水平的。 任一层实体需要使用下层服务,遵循本层…...

【Python】Python 连接字符串应优先使用 join 而不是 +
Python 连接字符串应优先使用 join 而不是 简介 字符串处理在大多数编程程序语言中都不可避免,字符串的连接也是在编程过程中经常需要面对的问题。 Python中的字符串与其他一些程序语言如C、Java有一些不同,它为不 可变对象。 一旦创建便不能改变&…...

uniapp 小程序 父组件调用子组件方法
答案:配合小程序API > this.selectComponent(""),来选择组件,再使用$vm选择组件实例,再调用方法,或者data 1 设置组件的id,如果你的多端,请跟据情况设置ref,class,id,以便通过小…...
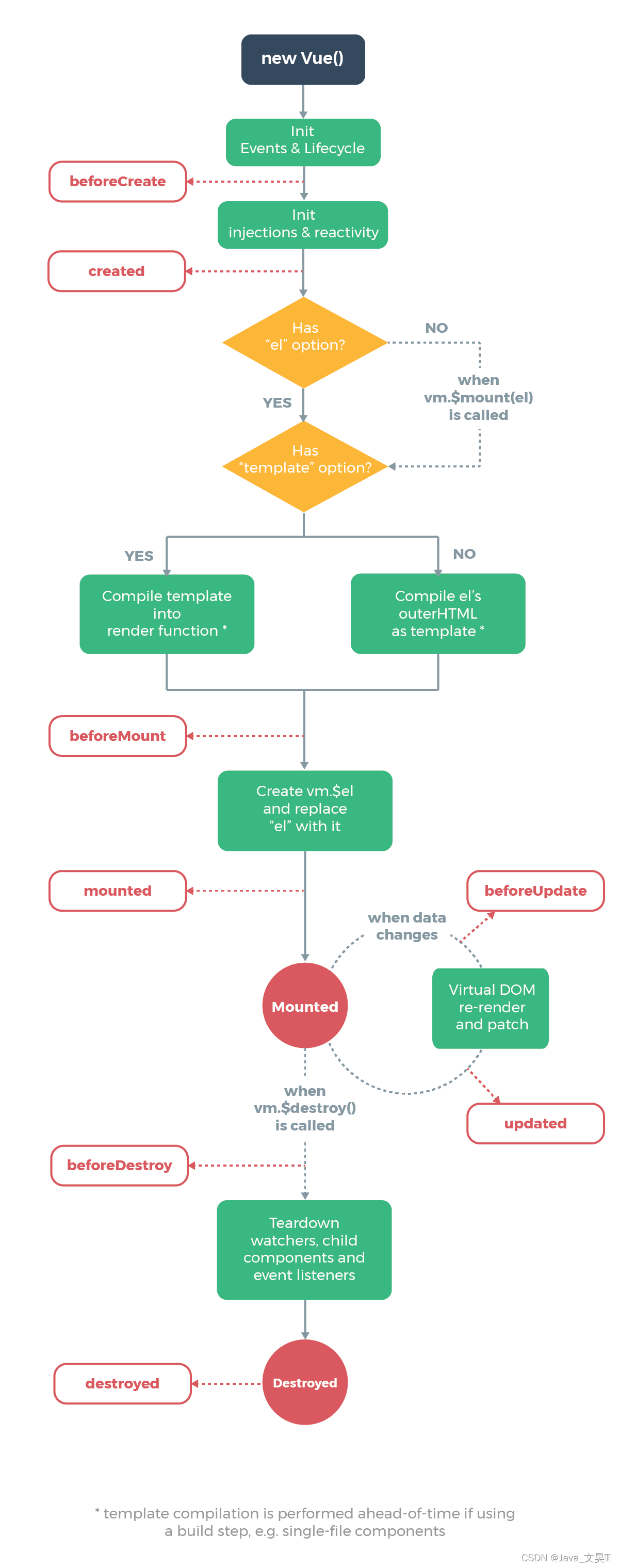
Vue-01:MVVM数据双向绑定与Vue的生命周期
一、Vue介绍 1.1 什么是Vue ? Vue是一个渐进式的JavaScript框架,用于构建用户界面。"渐进式"意味着Vue的设计理念是逐步增强应用的功能和复杂性,而不是一次性地引入所有功能。这使得开发者可以根据项目需求选择性地使用Vue的不同特…...
数据通信网络之OSPFv3基础
文章及资源归档至【AIShareLab】,回复 通信系统与网络 可获取。 文章目录 一、目的二、拓扑三、需求四、步骤 一、目的 掌握路由器的IPv6 基础配置。掌握OSPFv3(单区域)的基础配置。 二、拓扑 如图1 所示,三台路由器R1、R2 和R…...
:串口顶层模块UART_TOP、例化PLL、UART_FIFO、uart_drive)
FPGA-结合协议时序实现UART收发器(五):串口顶层模块UART_TOP、例化PLL、UART_FIFO、uart_drive
FPGA-结合协议时序实现UART收发器(五):串口顶层模块UART_TOP、例化PLL、UART_FIFO、uart_drive 串口顶层模块UART_TOP、例化PLL、UART_FIFO、uart_drive,功能实现。 文章目录 FPGA-结合协议时序实现UART收发器(五&…...

我学编程全靠B站了,真香-国外篇(第三期)
你好,我是Martin。 今天来点猛料,给大家推荐点我的压箱收藏-国外知名大学的公开课。 我推荐的不多,本着少就是多的原则,只给大家推荐我看过最好的五门视频,主要是来自两所国外高校:MIT美国麻省理工、CMU卡…...

c++ 变量常量指针练习题
Q1:在win32 x86模式下,int *p; int **pp; double *q; 请说明p、pp、q各占几个字节的内存单元。 p 占 4 个字节 pp 占 4 个字节 q 占 4 个字节 Q2常量1、1.0、“1”的数据类型是什么? 1 是 整形 int 1.0 是 浮点型 double “1” 是 const char * Q3 语句&…...
Linux底层基础知识
一.汇编,C语言,C,JAVA之间的关系 汇编,C语言,C可以通过不同的编译器,编译成机器码。而java只能由Java虚拟机识别。Java虚拟机可以看成一个操作系统,Java虚拟机是由汇编,C,…...
JUC并发编程--------线程安全篇
目录 什么是线程安全性问题? 如何实现线程安全? 1、线程封闭 2、无状态的类 3、让类不可变 4、加锁和CAS 并发环境下的线程安全问题有哪些? 1、死锁 2、活锁 3、线程饥饿 什么是线程安全性问题? 我们可以这么理解&#…...
机器视觉之Basler工业相机使用和配置方法(C++)
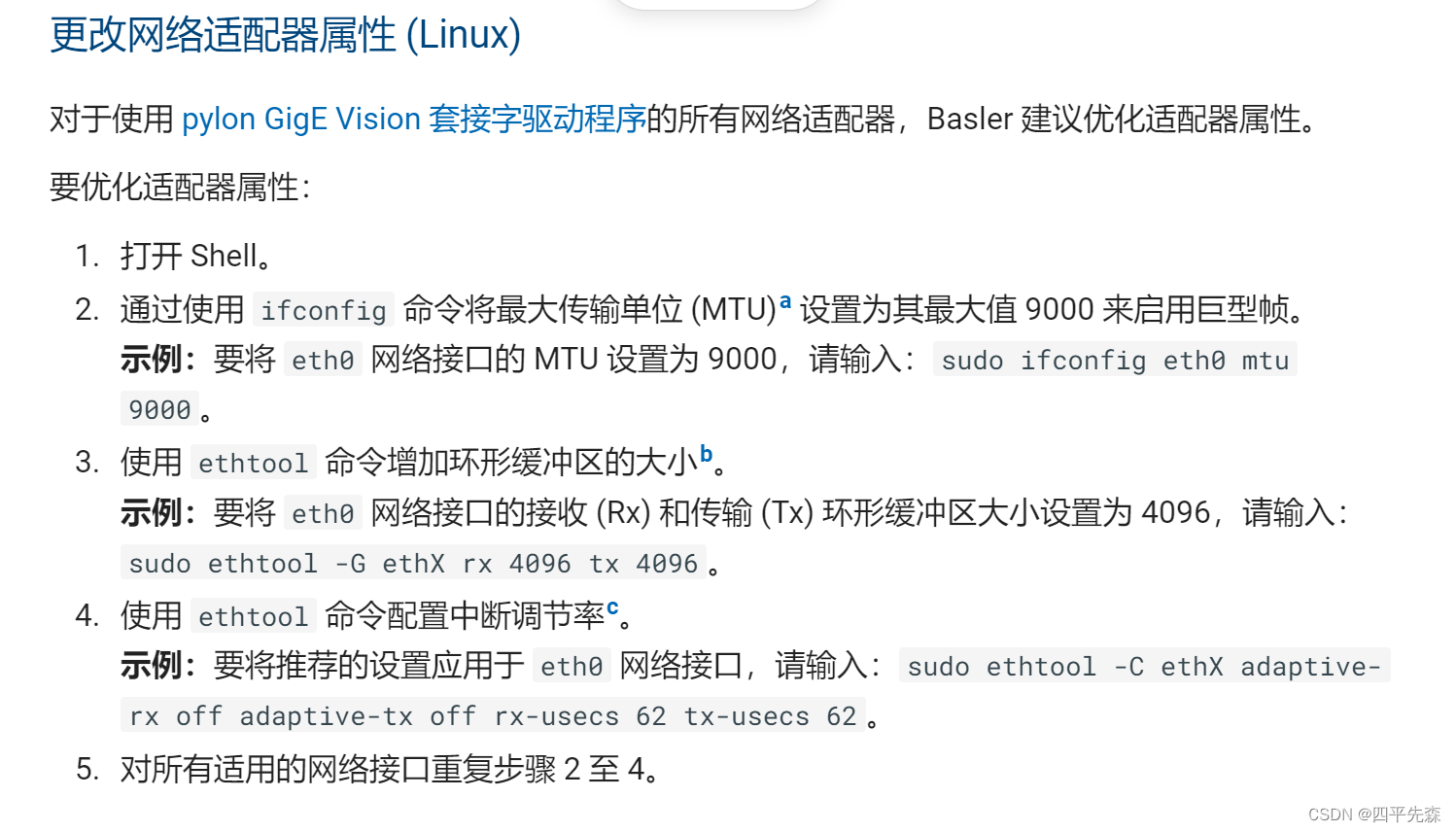
basler工业相机做双目视觉用,出现很多问题记录一下: 首先是多看手册:https://zh.docs.baslerweb.com/software 手册内有所有的源码和参考示例,实际上在使用过程中,大部分都是这些源码,具体项目选择对应的…...
Centos nginx配置文档
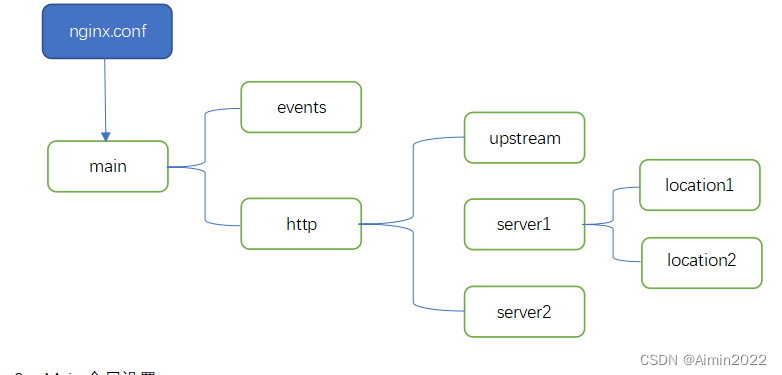
1、安装nginx: yum install nginx 2、Nginx常用命令 查看版本:nginx -v 启动:nginx -c /etc/nginx/nginx.conf 重新加载配置:nginx -s reload 停止:nginx -s stop 3、Nginx反向代理配置 nginx配置详解 1、Nginx配置图 详情可以查看:http://nginx.org/ru/docs/example…...
2023/9/14 -- C++/QT
作业: 仿照Vector实现MyVector,最主要实现二倍扩容 #include <iostream>using namespace std;template <typename T> class MyVector { private:T *data;size_t size;size_t V_capacity; public://无参构造MyVector():data(nullptr),size(…...

golang在goland编译时获取环境变量失效
在golang中, 我们通常使用os包来获取环境变量,如: os.Getenv() os.LookupEnv() 等。 但如果我们使用goland编译器,在编译是,这时操作环境变量,会发现os包读取到的环境变量值不变: 新增后&am…...

flac3d台阶法开挖命令流,5.0版本,计算结果有效合理,支护方式为初衬单元与锚杆联合支护...
flac3d台阶法开挖命令流,5.0版本,计算结果有效合理,支护方式为初衬单元与锚杆联合支护,初衬采用shell单元,锚杆为cable单元,可为相关计算提供参考 直接开整吧!最近在搞隧道台阶法开挖模拟&#…...

OpenClaw/阿里copaw/阿里QoderWork/腾讯Qclaw/腾讯workbuddy综合对比
1、功能介绍 核心能力:自然语言交互、本地文件操作、代码执行 支持模型:Qwen、Deepseek、OpenAI 等主流厂家模型均支持(硬件条件允许,也可通过ollama连接本地模型) 机器人助手:飞书、企业微信、QQ等创建…...
》——成本管理知识要点)
《信息系统项目管理师教程(第4版)》——成本管理知识要点
成本管理知识要点一、成本管理基础概念 项目成本管理是为确保项目在批准预算内完成,对成本进行规划、估算、预算、融资、筹资、管理和控制的过程。其核心目标是平衡成本与价值,既关注项目活动所需资源的成本,也考虑项目决策对产品/服务后续使…...
)
RK平台USB调试避坑指南:当你的U盘插上没反应时,先检查这三点(PHY/供电/DTS)
RK平台USB调试实战:从PHY供电到DTS配置的深度排障手册 当你把U盘插入RK3588开发板的USB接口,系统却毫无反应——这种场景对嵌入式工程师来说再熟悉不过。上周我在调试一块RK3568核心板时,就遇到了完全相同的困境:硬件焊接经过三遍…...
详解)
嵌入式系统链接器脚本(ld文件)详解
嵌入式系统中的链接器脚本(ld文件)深度解析1. 链接器脚本概述链接器脚本(linker script)是控制链接过程的关键文件,通常以.lds作为文件后缀名。它主要规定了如何将输入文件中的section放入输出文件,并控制输出文件内各部分在程序地址空间中的布局。每个链…...

ai辅助开发对比:github copilot与快马多模型在学生项目中的表现
最近在折腾学生项目时,发现AI编程助手的选择越来越多。作为通过GitHub学生认证的开发者,原本一直用Copilot当主力工具,但偶然接触到InsCode(快马)平台的多模型支持后,突然想做个系统性对比。于是花了周末时间搭建了个AI辅助开发评…...

Qt 数据QByteArray与QString高效转换实战技巧
1. QByteArray与QString的本质区别 在Qt开发中,QByteArray和QString这两个类经常让新手开发者感到困惑。我第一次接触Qt时,也曾经把两者混为一谈,结果在中文显示时出现了乱码问题。后来才发现,它们的根本区别在于:QByt…...

RMBG-2.0实战教程:结合FFmpeg实现‘原图→去背→合成视频’流水线
RMBG-2.0实战教程:结合FFmpeg实现‘原图→去背→合成视频’流水线 1. 引言:从单张抠图到批量视频合成 如果你用过RMBG-2.0,一定会被它精准的抠图效果惊艳到。它能轻松地把照片里的人或物“抠”出来,背景变得干干净净。但你想过没…...

清华大学提出统一多模态模型新突破:让AI同时学会“看“和“画“
这项由清华大学、西安交通大学和中科院大学联合开展的研究发表于2026年的arXiv预印本(论文编号:arXiv:2603.12793v1),研究团队开发了一个名为CHEERS的全新AI模型,能够同时具备图像理解和图像生成两种截然不同的能力。对…...

STM32水质检测系统设计与实现
基于STM32的水质检测系统设计与实现1. 项目概述1.1 系统架构本水质检测系统采用模块化设计架构,以STM32F103RCT6微控制器为核心,集成多种水质参数传感器、显示模块和无线通信模块。系统硬件架构分为三个主要层次:传感层:包含水温、…...