ROS2 的行为树 — 第 1 部分:解锁高级机器人决策和控制

一、说明
在复杂而迷人的机器人世界中,行为树(BT)已成为决策过程中不可或缺的一部分。它们提供了一种结构化、模块化和高效的方法来对机器人的行为进行编程。BT起源于视频游戏行业,用于控制非玩家角色,他们在机器人领域找到了归宿,他们擅长管理无数的任务和条件。
用于机器人导航的Nav2和操作框架MoveIt等机器人软件使用行为树来处理复杂的动作和条件。
在这篇文章中,我们将探索行为树以彻底理解它们。我们将首先分解行为树的基本部分,并清楚地了解它们的工作原理。然后,我们将进入实际领域,编写代码来创建和使用行为树,独立于任何特定的平台或框架。
但我们不会止步于此。一旦我们掌握了基础知识,我们将更进一步,将我们的行为树与ROS2(机器人操作系统2)集成,ROS<>是一个用于编写机器人软件的灵活框架。这将展示如何在现实世界的机器人环境中使用行为树,增强我们自主系统的决策能力。
二、行为树的基本概念
将行为树 (BT) 视为视频游戏角色、机器人或任何其他需要决定下一步操作的自主代理的决策图。
想象一下,你正在导演一部戏剧,但你的演员是机器人。作为导演,你需要一种方法来指导你的演员,告诉他们该做什么以及什么时候做。行为树(BT)就像你的脚本,详细说明你的机器人演员需要做出的每一个动作。就像在真实的戏剧中一样,当导演叫“动作”(或者,在这种情况下,“滴答”)时,节目(或任务)就开始了。
那么,什么是“刻度”?在BT的上下文中,tick是从树的根节点(或起点)到其子节点的信号,敦促它们执行任务。节点仅在收到即时报价时“采取行动”。
现在,这个系统的美妙之处在于它的反馈机制。节点开始执行其任务后,它会使用以下三种状态之一与控制器(其父节点)通信其进度:正在运行、成功或失败。
正在运行:这种状态有点像在说,“我在上面,但我还没有完成。
成功:这相当于,“我已经尽了自己的一份力量,而且进展顺利。
失败:这就像说,“我试过了,但我做不到。
根据这些状态,导演决定将下一个即时报价发送到何处。这是一个持续到任务完成或不再有效的循环。
行为树由两种主要类型的节点组成:控制流节点和执行节点。让我们更深入地了解它们。
控制流节点就像导演的助手,他们帮助决定演员下一步应该做什么。主要有四种类型:
序列(→)节点:这就像一个严格的助手,他要求每个任务都必须完美地完成,顺序,然后才能继续下一个任务。如果任何任务失败,序列将停止并报告失败。
回退 (?节点(也称为选择器):这是一个更灵活的助手,他有一个任务列表并逐个尝试,直到一个成功。如果所有任务都失败,则回退报告失败。
并行 (⇒)节点: 这是一个可以同时处理多项任务的助手,指导多个演员同时执行他们的任务。并行节点根据一组必须成功的任务来定义其成功。
装饰器节点:这个助手有点特别,因为它只处理一个演员,但可以通过各种方式修改演员的行为。有不同种类的装饰器,每种装饰器都为任务提供了独特的转折。
执行节点是参与者,即执行任务(操作)或评估某些条件(条件)的参与者。
操作节点: 当此参与者收到勾号时,它会启动其任务,使控制器保持“正在运行”状态的更新,最后报告“成功”或“失败”。
条件节点: 这个演员更像是一个抽查者。它评估是否满足某些条件,如果条件为真,则立即报告“成功”,如果条件为假,则立即报告“失败”。
现在您已经了解了基础知识,您可以使用行为树指导您的机器人游戏。请记住,此框架旨在提高灵活性和适应性,使您的机器人参与者能够快速响应变化并执行复杂、细致入微的任务。

三、BT 的节点类型
让我们考虑一个机器人手臂上下文中的行为树,它可以捡起球并将其放置在球门位置。
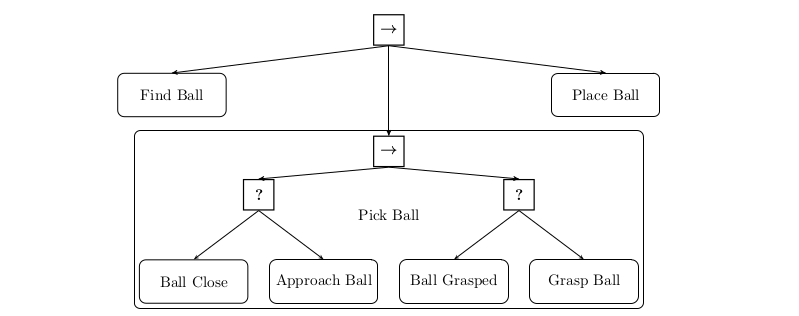
高级BT执行一项任务,包括首先找到,然后挑选并最终放置球
- BT 以序列节点作为主控制器开始。该节点对机器人有两个主要任务:“查找球”和“放置球”。
- 第一个任务“找球”涉及一个机器人,该机器人被分配来定位球。
- 第二个任务“放置一个球”更为复杂。此任务由另一个“序列”节点管理,该节点可确保按顺序执行一系列操作。此序列涉及任务“挑选球”。
- “拾球”任务由两个回退节点管理。这些节点中的每一个都有不同的方法来引导机器人。
- 第一个回退节点确保机器人检查“球是否接近”,如果是,则指示机器人“接近球”。
- 第二个回退节点负责检查“球是否被抓住”,如果没有,则指示机器人“抓住球”。
请记住,在BT中,节点仅在收到信号或“滴答”时才起作用。一旦任务启动,机器人就会将其状态传达回其父节点。循环一直持续到所有任务完成或无法完成。
到目前为止,我们已经详细讨论了行为树的概念和机制。现在,是时候将这些想法付诸行动了。
在深入研究实际编码之前,我们需要设置行为树包。在以下各节中,我们将引导您完成设置此包的过程,之后我们将探索将行为树变为现实的代码。
要在 Ubuntu 20.04 上设置并运行我们的第一个 BehaviorTree.CPP 示例,请执行以下步骤:
# Install the required dependencies:
# Open a terminal and run the following commands to install the necessary
# dependencies:
sudo apt-get update
sudo apt-get install -y libzmq3-dev libboost-dev libboost-system-dev libboost-filesystem-dev libboost-thread-dev libprotobuf-dev protobuf-compiler libmsgsl-dev libgtest-dev cmake# Build and install BehaviorTree.CPP:
# Clone the BehaviorTree.CPP repository, build, and install the library:
git clone https://github.com/BehaviorTree/BehaviorTree.CPP.git
cd BehaviorTree.CPP
mkdir build
cd build
cmake ..
make -j$(nproc)
sudo make install让我们从使用 BehaviorTree 的简单示例开始.CPP将帮助您了解基础知识并熟悉语法。
mkdir ~/example1
cd ~/example1
touch main.cpp && touch CMakeLists.txt// main.cpp#include <behaviortree_cpp/bt_factory.h>
#include <behaviortree_cpp/behavior_tree.h>using namespace BT;class SaySomething : public SyncActionNode
{
public:SaySomething(const std::string& name, const NodeConfiguration& config): SyncActionNode(name, config){}static PortsList providedPorts(){return { InputPort<std::string>("message") };}NodeStatus tick() override{std::string message;getInput("message", message);std::cout << "Robot says: " << message << std::endl;return NodeStatus::SUCCESS;}
};static const char* xml_text = R"(
<root><BehaviorTree><SaySomething message="Hello, World!" /></BehaviorTree>
</root>
)";int main()
{BehaviorTreeFactory factory;factory.registerNodeType<SaySomething>("SaySomething");auto tree = factory.createTreeFromText(xml_text);tree.tickWhileRunning();return 0;
}# CMakeLists.txt
cmake_minimum_required(VERSION 3.5)
project(bt_example)set(CMAKE_CXX_STANDARD 17)find_package(behaviortree_cpp REQUIRED)add_executable(bt_example main.cpp)
target_link_libraries(bt_example BT::behaviortree_cpp)# Now, build and run the example:
mkdir build
cd build
cmake ..
make
./bt_example太棒了,您已经获得了第一个BehaviorTree.CPP 代码片段!该脚本代表了一个基本的行为树,其中机器人(您的演员)有一个简单的任务:说些什么。让我们来分解一下:
该类扩展了该类,该类是 BehaviorTree.CPP 提供的执行节点类型之一。这是一个同步操作节点,这意味着它不返回“正在运行”状态,而只返回“成功”或“失败”。在我们的例子中,它将始终返回“成功”。SaySomethingSyncActionNodeSyncActionNode
该方法是在勾选此节点时调用的主要方法。在这里,它检索输入消息并将其输出到控制台。由于它每次都成功执行其任务,因此它会返回 .tick()NodeStatus::SUCCESS
定义为 的 XML 文本表示行为树的结构。它包含一个节点,带有消息“Hello, World!xml_textSaySomething
最后,该函数创建一个 ,注册节点类型,从 XML 文本创建树,并在树运行时勾选树。这让机器人说“你好,世界!mainBehaviorTreeFactorySaySomething
现在,有了基础知识,您就可以转向更复杂的行为树,例如拾取和放置树。在选取和放置树中,您将引入更多控制流节点和执行节点,将它们交织在一起以实现所需的行为。此处提供了此示例的完整代码。
#include <iostream>#include <behaviortree_cpp/bt_factory.h>
#include <behaviortree_cpp/behavior_tree.h>using namespace BT;// Define FindBall action node
class FindBall : public BT::SyncActionNode
{public:FindBall(const std::string& name) : BT::SyncActionNode(name, {}){}// Define the tick() function for the FindBall nodeNodeStatus tick() override{std::cout << "[⚓ FindBall ] => \t" << this->name() << std::endl; return BT::NodeStatus::SUCCESS;}
};// Define PickBall action node
class PickBall : public BT::SyncActionNode
{public:PickBall(const std::string& name) : BT::SyncActionNode(name, {}){}// Define the tick() function for the PickBall nodeNodeStatus tick() override{std::cout << "[⚓ PickBall ] => \t" << this->name() << std::endl;return BT::NodeStatus::SUCCESS;}
};// Define PlaceBall action node
class PlaceBall : public BT::SyncActionNode
{public:PlaceBall(const std::string& name) : BT::SyncActionNode(name, {}){}// Define the tick() function for the PlaceBall nodeNodeStatus tick() override{std::cout << "[⚓ PlaceBall ] => \t" << this->name() << std::endl;return BT::NodeStatus::SUCCESS;}
};// Define GripperInterface class for interacting with the gripper
class GripperInterface
{private:bool _opened;public:GripperInterface() : _opened(true){}NodeStatus open(){_opened = true;std::cout << "GripperInterface::open" << std::endl;return BT::NodeStatus::SUCCESS;}NodeStatus close(){std::cout << "GripperInterface::close" << std::endl;_opened = false;return BT::NodeStatus::SUCCESS;}
};// Define BallClose condition function
BT::NodeStatus BallClose()
{std::cout << "[ Close to ball: NO ]" << std::endl;return BT::NodeStatus::FAILURE;
}// Define BallGrasped condition function
BT::NodeStatus BallGrasped()
{std::cout << "[ Grasped: NO ]" << std::endl;return BT::NodeStatus::FAILURE;
}// Define the behavior tree structure in XML format
static const char* xml_text = R"(<root main_tree_to_execute = "MainTree" ><BehaviorTree ID="MainTree"><Sequence name="root_sequence"><FindBall name="found_ok"/><Sequence><Fallback><BallClose name="no_ball"/><PickBall name="approach_ball"/></Fallback><Fallback><BallGrasped name="no_grasp"/><GraspBall name="grasp_ball"/></Fallback></Sequence><PlaceBall name="ball_placed"/></Sequence></BehaviorTree></root>)";int main()
{ BehaviorTreeFactory factory;// Register custom action nodes with the factoryfactory.registerNodeType<FindBall>("FindBall");factory.registerNodeType<PickBall>("PickBall");factory.registerNodeType<PlaceBall>("PlaceBall");// Register custom condition nodes with the factoryfactory.registerSimpleCondition("BallClose", std::bind(BallClose));factory.registerSimpleCondition("BallGrasped", std::bind(BallGrasped));// Create an instance of GripperInterfaceGripperInterface gripper;// Register a simple action node using the GripperInterface instancefactory.registerSimpleAction("GraspBall", std::bind(&GripperInterface::close, &gripper));// Create the behavior tree using the XML descriptionauto tree = factory.createTreeFromText(xml_text);// Run the behavior tree until it finishestree.tickWhileRunning();return 0;
}# Output
[⚓ FindBall ] => found_ok
[ Close to ball: NO ]
[⚓ PickBall ] => approach_ball
[ Grasped: NO ]
GripperInterface::close
[⚓ PlaceBall ] => cube_placed太好了,您创建了一个更复杂的行为树!此脚本表示机器人的拾取和放置操作,由查找、拾取和放置球组成。让我们剖析一下:
- 您已经创建了三个操作节点:、 和 。这些类中的每一个都扩展并实现函数,该函数记录操作的名称并返回 .
FindBallPickBallPlaceBallSyncActionNodetick()NodeStatus::SUCCESS - 您已经定义了一个类,该类表示机器人的抓手。它可以打开和关闭夹持器,两个操作返回。
GripperInterfaceNodeStatus::SUCCESS - 您已经定义了两个条件函数:和 。这些功能表示机器人在捡球之前需要进行的检查。他们目前总是返回,模拟球没有接近并且机器人还没有抓住球的场景。
BallCloseBallGraspedNodeStatus::FAILURE - XML 字符串定义行为树。它从一个序列节点开始,该节点首先尝试找到球 ()。找到球后,它会尝试拾取球,这是由两个回退节点组成的另一个序列节点。第一个回退节点检查球是否接近 (),如果没有,机器人将接近球 ()。第二个回退节点检查球是否被抓住(),如果没有,机器人会抓住球()。一旦球被捡起,机器人就会放置球()。
xml_textFindBallBallClosePickBallBallGraspedGraspBallPlaceBall - 最后,该函数注册自定义操作和条件节点,创建 的实例,使用 注册操作,从 XML 文本创建树,并在树运行时勾选树。
mainGripperInterfaceGraspBallGripperInterface
此代码提供了机器人如何使用行为树执行一系列任务的实际演示,并在此过程中进行检查。但是,请注意,当前条件始终返回 。为了使此示例更加逼真,您可能需要根据机器人的实际状态及其环境更新这些条件。NodeStatus::FAILURE
这是这篇文章的总结!您已经了解了行为树、其结构和组件,甚至使用拾取和放置示例实现了复杂的树。
请继续关注我们的下一篇文章,我们将把事情提升一个档次。我们将介绍 ROS2(机器人操作系统 2)与行为树的集成,为您的机器人应用程序创建复杂、健壮和自适应行为开辟更多可能性。下一篇文章见!
我希望这些信息对您有所帮助,并且您发现它很有用。如果您有任何问题或意见,请随时告诉我。感谢您的反馈,并很乐意帮助回答您可能遇到的任何问题。感谢您抽出宝贵时间阅读本文。
我总是在LinkedIn上分享有趣的文章和更新,所以如果您想随时了解情况,请随时在平台上关注我。杰加特桑·尚穆甘
参考资料:
1.行为树官方文档
2.机器人和人工智能中的行为树:简介
3.导航2行为树
Nav2 Behavior Trees — Nav2 1.0.0 documentation (ros.org)
相关文章:
ROS2 的行为树 — 第 1 部分:解锁高级机器人决策和控制
一、说明 在复杂而迷人的机器人世界中,行为树(BT)已成为决策过程中不可或缺的一部分。它们提供了一种结构化、模块化和高效的方法来对机器人的行为进行编程。BT起源于视频游戏行业,用于控制非玩家角色,他们在机器人领域…...

kafka事务的详解
一 kafka事务的机制 1.1 kafka的事务机制 通过事务机制,KAFKA 可以实现对多个 topic 的多个 partition 的原子性的写入,即处于同一个事务内的所有消息,不管最终需要落地到哪个 topic 的哪个 partition, 最终结果都是要么全部写成功…...

Flutter Fair逻辑动态化架构设计与实现
本文的核心内容包括: 数据逻辑处理布局中的逻辑处理Flutter类型数据处理一、数据逻辑处理 我们接触的每一个Flutter界面,大多由布局和逻辑相关的代码组成。如Flutter初始工程的Counting Demo的代码: class _MyHomePageState extends State<MyHomePage> {// 变量 int…...
【每日一题】74. 搜索二维矩阵
74. 搜索二维矩阵 - 力扣(LeetCode) 给你一个满足下述两条属性的 m x n 整数矩阵: 每行中的整数从左到右按非递减顺序排列。每行的第一个整数大于前一行的最后一个整数。 给你一个整数 target ,如果 target 在矩阵中,返…...

软件测试进大厂,拿高薪,怎么做?看这里!
有些同学大学专业不对口,但有想进大厂想拿高薪心,只要你有想法,那就一定有实现的方法。 俗话说:“世间无难事,只怕有心人”。仔细思索一下,哪家大厂能缺软件测试这一重要职位。相对大学所学专业而言&#…...

【读书笔记】基于世界500强的高薪实战Kubernetes课程
第1章 课程简介&&自我介绍 1-1 自我介绍 1-2 课程大纲内容介绍 1-3 课程更新通知 第2章 K8s必备知识-Docker容器基础入门 2-1 课程介绍 2-2 docker容器介绍 2-3 docker优缺点 2-4 安装和配置docker 2-5 修改内核参数 2-6 配置镜像加速器 2-7 配置常用镜像加…...

【Java 基础篇】Java并发包详解
多线程编程是Java开发中一个重要的方面,它能够提高程序的性能和响应能力。然而,多线程编程也伴随着一系列的挑战,如线程安全、死锁、性能问题等。为了解决这些问题,Java提供了一套强大的并发包。本文将详细介绍Java并发包的各个组…...
MYSQL存储引擎基础知识介绍
下面重点介绍几种常用的存储引擎,并对比各个存储引擎之间的区别,以帮助读者理解 不同存储引擎的使用方式。 MyISAM MyISAM是 MySQL的默认存储引擎。MyISAM不支持事务、也不支持外键,其优势是访 问的速度快,对事务完整性没有要求或者以 SEL…...

vue学习之element-ui组件集成
1. element-ui 链接 https://element.eleme.cn/#/zh-CN 2. element-ui 安装 cnpm install element-ui3. 创建项目 https://blog.csdn.net/qq_36940806/article/details/132921688?spm=1001.2014.3001.5502 4. 引入element库 /src/main.js 引入 element-uiimport Vue from…...

如何通过百度SEO优化提升网站排名(掌握基础概念,实现有效优化)
随着互联网的发展,搜索引擎优化(SEO)成为了网站优化中不可或缺的一部分。在中国,百度搜索引擎占据着主导地位,因此掌握百度SEO概念和优化技巧对网站的排名和曝光非常重要。 百度SEO排名的6个有效方法: 首…...

Golang 字符串
目录 1. Golang 字符串1.1. 基础概念1.2. 字符串编码1.3. 遍历字符串1.4. 类型转换1.5. 总结1.6. String Concatenation (字符串连接)1.6.1. Using the operator1.6.2. Using the operator1.6.3. Using the Join method1.6.4. Using Sprintf method1.6.5. Using Go string Bu…...

python应用中使用了multiprocessing多进程,使用pyinstaller打包出来的程序可能产生多个窗口
问题现象 我用pyside(类似pyqt)开发了一个应用程序。直接使用pycharm运行,一切都正常。但当我使用pyinstaller将它打包之后,再去运运行,发现窗口总是产生多个。 问题分析 直接运行没有问题,那么问题肯定…...
数据结构与算法——13.队列的拓展
这篇文章主要讲一下双端队列,优先队列,阻塞队列等队列的拓展内容。 目录 1.队列拓展概述 2.双端队列的链表实现 3.双端队列的数组实现 4.优先队列无序数组实现 5.阻塞队列 6.总结 1.队列拓展概述 首先来看一张图,来大致了解一下他们的…...

机器学习入门教学——损失函数(交叉熵法)
1、前言 我们在训练神经网络时,最常用到的方法就是梯度下降法。在了解梯度下降法前,我们需要了解什么是损失(代价)函数。所谓求的梯度,就是损失函数的梯度。如果不知道什么是梯度下降的,可以看一下这篇文章:机器学习入…...

pytest一些常见的插件
Pytest拥有丰富的插件架构,超过800个以上的外部插件和活跃的社区,在PyPI项目中以“ pytest- *”为标识。 本篇将列举github标星超过两百的一些插件进行实战演示。 插件库地址:http://plugincompat.herokuapp.com/ 1、pytest-html࿱…...

基于51单片机多路DTH11温湿度检测控制系统
一、系统方案 1、本设计采用51单片机作为主控器。 2、DHT11采集温度度,支持3路温度度,液晶1602显示。 3、按键设置报警阀值。 4、系统声光报警。 二、硬件设计 原理图如下: 三、单片机软件设计 1、首先是系统初始化 //初始化LCD*********…...

宝塔重装注意事项
欢迎关注我的公众号:夜说猫,让一个贫穷的程序员不靠打代码也能吃饭~ 前言 宝塔8.0版本,宝塔卸载重装,或者重装Linux系统后重新安装宝塔也适用。 不能上来直接就执行安装宝塔脚本,除非之前没有安装过宝塔。 步骤 1、…...
【MySQL】 MySQL的增删改查(进阶)--壹
文章目录 🛫数据库约束🌴约束类型🎋NOT NULL约束🎍UNIQUE:唯一约束🌳DEFAULT:默认值约束🎄PRIMARY KEY:主键约束🍀FOREIGN KEY:外键约束…...

Map<K,V>的使用和List学习
Map Map是一种专门用来进行搜索的容器或者数据结构,其搜索的效率与其具体的实例化子类有关。对于静态类型的查找来说,一般直接遍历或者用二分查找【不会对区间进行插入和删除操作】 而在现实生活中的查找比如: 根据姓名查询考试成绩通讯录…...

Flask实现Web服务调用Python程序
Flask实现Web服务调用Python程序_flask调用python程序_小白白程序员的博客-CSDN博客 【小沐学Python】Python实现Web服务器(Flask入门)_python flask web开发_爱看书的小沐的博客-CSDN博客...

在软件开发中正确使用MySQL日期时间类型的深度解析
在日常软件开发场景中,时间信息的存储是底层且核心的需求。从金融交易的精确记账时间、用户操作的行为日志,到供应链系统的物流节点时间戳,时间数据的准确性直接决定业务逻辑的可靠性。MySQL作为主流关系型数据库,其日期时间类型的…...
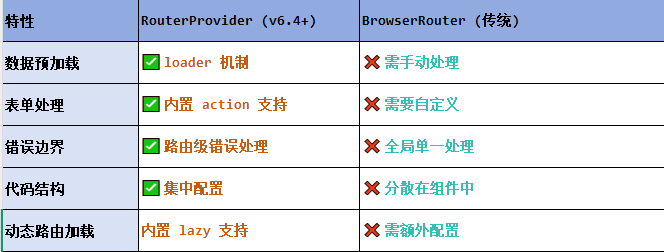
React第五十七节 Router中RouterProvider使用详解及注意事项
前言 在 React Router v6.4 中,RouterProvider 是一个核心组件,用于提供基于数据路由(data routers)的新型路由方案。 它替代了传统的 <BrowserRouter>,支持更强大的数据加载和操作功能(如 loader 和…...

Java 8 Stream API 入门到实践详解
一、告别 for 循环! 传统痛点: Java 8 之前,集合操作离不开冗长的 for 循环和匿名类。例如,过滤列表中的偶数: List<Integer> list Arrays.asList(1, 2, 3, 4, 5); List<Integer> evens new ArrayList…...
SCAU期末笔记 - 数据分析与数据挖掘题库解析
这门怎么题库答案不全啊日 来简单学一下子来 一、选择题(可多选) 将原始数据进行集成、变换、维度规约、数值规约是在以下哪个步骤的任务?(C) A. 频繁模式挖掘 B.分类和预测 C.数据预处理 D.数据流挖掘 A. 频繁模式挖掘:专注于发现数据中…...
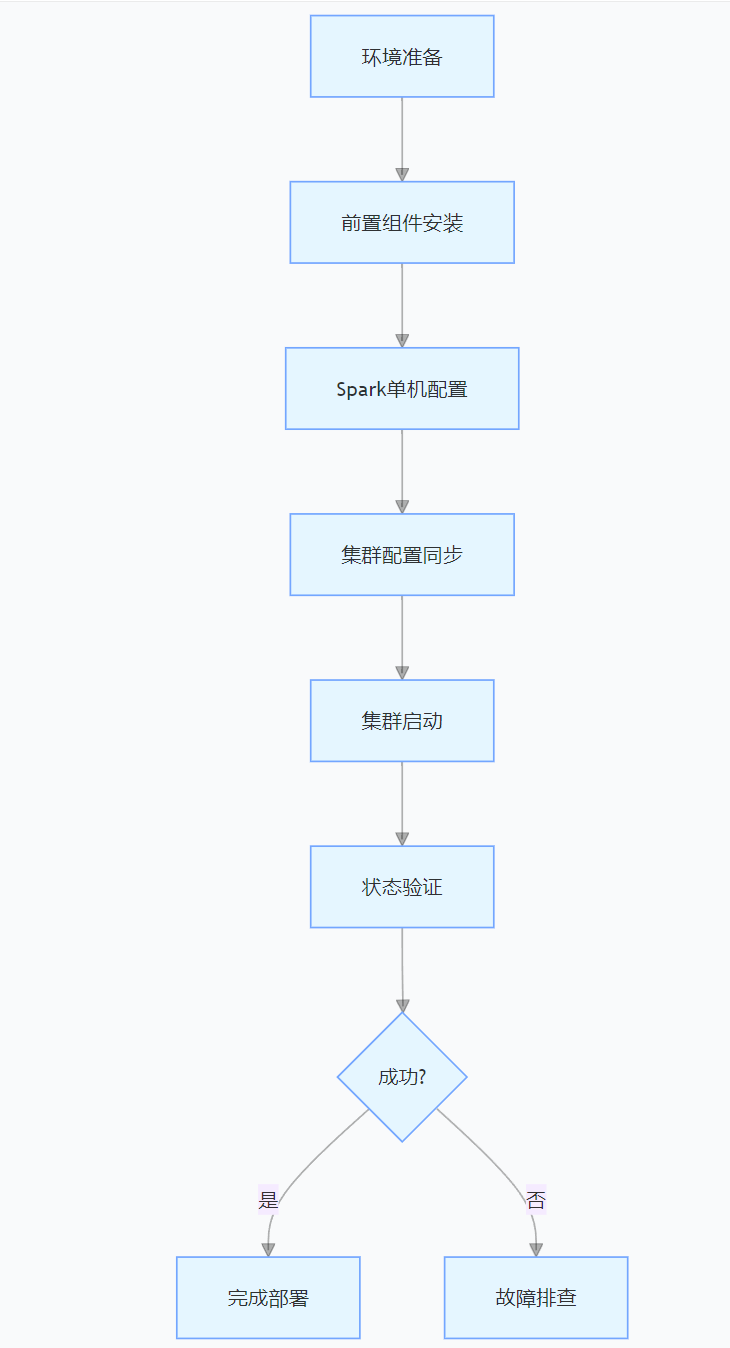
CentOS下的分布式内存计算Spark环境部署
一、Spark 核心架构与应用场景 1.1 分布式计算引擎的核心优势 Spark 是基于内存的分布式计算框架,相比 MapReduce 具有以下核心优势: 内存计算:数据可常驻内存,迭代计算性能提升 10-100 倍(文档段落:3-79…...

图表类系列各种样式PPT模版分享
图标图表系列PPT模版,柱状图PPT模版,线状图PPT模版,折线图PPT模版,饼状图PPT模版,雷达图PPT模版,树状图PPT模版 图表类系列各种样式PPT模版分享:图表系列PPT模板https://pan.quark.cn/s/20d40aa…...

如何理解 IP 数据报中的 TTL?
目录 前言理解 前言 面试灵魂一问:说说对 IP 数据报中 TTL 的理解?我们都知道,IP 数据报由首部和数据两部分组成,首部又分为两部分:固定部分和可变部分,共占 20 字节,而即将讨论的 TTL 就位于首…...
:邮件营销与用户参与度的关键指标优化指南)
精益数据分析(97/126):邮件营销与用户参与度的关键指标优化指南
精益数据分析(97/126):邮件营销与用户参与度的关键指标优化指南 在数字化营销时代,邮件列表效度、用户参与度和网站性能等指标往往决定着创业公司的增长成败。今天,我们将深入解析邮件打开率、网站可用性、页面参与时…...

在web-view 加载的本地及远程HTML中调用uniapp的API及网页和vue页面是如何通讯的?
uni-app 中 Web-view 与 Vue 页面的通讯机制详解 一、Web-view 简介 Web-view 是 uni-app 提供的一个重要组件,用于在原生应用中加载 HTML 页面: 支持加载本地 HTML 文件支持加载远程 HTML 页面实现 Web 与原生的双向通讯可用于嵌入第三方网页或 H5 应…...

QT3D学习笔记——圆台、圆锥
类名作用Qt3DWindow3D渲染窗口容器QEntity场景中的实体(对象或容器)QCamera控制观察视角QPointLight点光源QConeMesh圆锥几何网格QTransform控制实体的位置/旋转/缩放QPhongMaterialPhong光照材质(定义颜色、反光等)QFirstPersonC…...