深入浅出C++ ——红黑树模拟实现STL中的set与map
文章目录
- 一、红黑树
- 二、用泛型红黑树模拟实现set
- 三、用泛型红黑树模拟实现map
一、红黑树
红黑树作为set和map的底层容器,既要实现插入key又要实现插入pair,所以做了稍许的改动,使其成为一颗泛型结构的红黑树,通过不同的实例化参数,实现set和map。如果要生成set,就传(key,key);如果要生成map,就传(key,pair),由第二个参数来控制生成容器的结构。
改动
在定义模板的红黑树节点时,由template<class K, class V> 改为template<class T>,因为是泛型,所以原本的pair<K, V> _kv;改为T _data;。红黑树的模板template<class K, class V>也改为template<class T> ,在内部代码中,将所有的pair<K, V>都改为T,kv改为data。
在模拟实现set时,定义成员变量为RBTree<K, K> _t; ,在模拟实现map的时候,定义成员变量为RBTree<K, pair<K, V>> _t; 。但是在插入的过程中,比较大小时,不能用data来比较,因为对于map而言,data是pair,要用pair中的first来比较,可以使用仿函数来实现。
set的底层成员
RBTree<K, K, SetKeyOfT> _t;
map的底层成员
RBTree<K, pair<K, V>, MapKeyOfT> _t;
红黑树的迭代器
红黑树的begin迭代器是整棵树的最左侧节点,end迭代器是空。
迭代器++分为两种情况,如果该节点右子树不为空,就找右子树的最左节点。如果该节点的右子树为空,就找祖先里面孩子不是祖先的右的那个。
迭代器–分为两种情况,如果该节点右子树不为空,就找左子树的最右节点。如果该节点的右子树为空,就找祖先里面孩子不是祖先的左的那个。
泛型红黑树
#pragma once
enum Colour
{RED,BLACK
};template<class T>
struct RBTreeNode
{RBTreeNode<T>* _left;RBTreeNode<T>* _right;RBTreeNode<T>* _parent;T _data;Colour _col;RBTreeNode(const T& data):_left(nullptr), _right(nullptr), _parent(nullptr), _data(data){}
};template<class T, class Ref, class Ptr> //此处的模版参数采用三个可以同时兼顾类型,引用,指针
struct __RBTreeIterator
{typedef RBTreeNode<T> Node;typedef __RBTreeIterator<T, Ref, Ptr> Self;Node* _node;__RBTreeIterator(Node* node):_node(node){}Ref operator*(){return _node->_data;}Ptr operator->(){return &_node->_data;}bool operator!=(const Self& s) const{return _node != s._node;}bool operator==(const Self& s) const{return _node == s._node;}Self& operator++(){if (_node->_right){// 下一个就是右子树的最左节点Node* left = _node->_right;while (left->_left){left = left->_left;}_node = left;}else{// 找祖先里面孩子不是祖先的右的那个Node* parent = _node->_parent;Node* cur = _node;while (parent && cur == parent->_right){cur = cur->_parent;parent = parent->_parent;}_node = parent;}return *this;}Self& operator--(){if (_node->_left){// 下一个是左子树的最右节点Node* right = _node->_left;while (right->_right){right = right->_right;}_node = right;}else{// 孩子不是父亲的左的那个祖先Node* parent = _node->_parent;Node* cur = _node;while (parent && cur == parent->_left){cur = cur->_parent;parent = parent->_parent;}_node = parent;}return *this;}
};template<class K, class T, class KeyOfT>
struct RBTree
{typedef RBTreeNode<T> Node;
public:typedef __RBTreeIterator<T, T&, T*> iterator;iterator begin(){Node* left = _root;while (left && left->_left){left = left->_left;}return iterator(left);}iterator end(){return iterator(nullptr);}pair<iterator, bool> Insert(const T& data){KeyOfT kot;if (_root == nullptr){_root = new Node(data);_root->_col = BLACK;return make_pair(iterator(_root), true);}Node* parent = nullptr;Node* cur = _root;while (cur){if (kot(cur->_data) < kot(data)){parent = cur;cur = cur->_right;}else if (kot(cur->_data) > kot(data)){parent = cur;cur = cur->_left;}else{return make_pair(iterator(cur), false);}}cur = new Node(data);Node* newnode = cur;cur->_col = RED;if (kot(parent->_data) < kot(data)){parent->_right = cur;}else{parent->_left = cur;}cur->_parent = parent;while (parent && parent->_col == RED){Node* grandfater = parent->_parent;assert(grandfater);assert(grandfater->_col == BLACK);// 关键看叔叔if (parent == grandfater->_left){Node* uncle = grandfater->_right;// 情况一 : uncle存在且为红,变色+继续往上处理if (uncle && uncle->_col == RED){parent->_col = uncle->_col = BLACK;grandfater->_col = RED;// 继续往上处理cur = grandfater;parent = cur->_parent;}// 情况二+三:uncle不存在 + 存在且为黑else{// 情况二:右单旋+变色// g // p u// cif (cur == parent->_left){RotateR(grandfater);parent->_col = BLACK;grandfater->_col = RED;}else{// 情况三:左右单旋+变色// g // p u// cRotateL(parent);RotateR(grandfater);cur->_col = BLACK;grandfater->_col = RED;}break;}}else // (parent == grandfater->_right){Node* uncle = grandfater->_left;// 情况一if (uncle && uncle->_col == RED){parent->_col = uncle->_col = BLACK;grandfater->_col = RED;// 继续往上处理cur = grandfater;parent = cur->_parent;}else{// 情况二:左单旋+变色// g // u p// cif (cur == parent->_right){RotateL(grandfater);parent->_col = BLACK;grandfater->_col = RED;}else{// 情况三:右左单旋+变色// g // u p// cRotateR(parent);RotateL(grandfater);cur->_col = BLACK;grandfater->_col = RED;}break;}}}_root->_col = BLACK;return make_pair(iterator(newnode), true);}void InOrder(){_InOrder(_root);cout << endl;}bool IsBalance(){if (_root == nullptr){return true;}if (_root->_col == RED){cout << "根节点不是黑色" << endl;return false;}// 黑色节点数量基准值int benchmark = 0;return PrevCheck(_root, 0, benchmark);}private:bool PrevCheck(Node* root, int blackNum, int& benchmark){if (root == nullptr){//cout << blackNum << endl;//return;if (benchmark == 0){benchmark = blackNum;return true;}if (blackNum != benchmark){cout << "某条黑色节点的数量不相等" << endl;return false;}else{return true;}}if (root->_col == BLACK){++blackNum;}if (root->_col == RED && root->_parent->_col == RED){cout << "存在连续的红色节点" << endl;return false;}return PrevCheck(root->_left, blackNum, benchmark)&& PrevCheck(root->_right, blackNum, benchmark);}void _InOrder(Node* root){if (root == nullptr){return;}_InOrder(root->_left);cout << root->_kv.first << ":" << root->_kv.second << endl;_InOrder(root->_right);}void RotateL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;if (subRL)subRL->_parent = parent;Node* ppNode = parent->_parent;subR->_left = parent;parent->_parent = subR;if (_root == parent){_root = subR;subR->_parent = nullptr;}else{if (ppNode->_left == parent){ppNode->_left = subR;}else{ppNode->_right = subR;}subR->_parent = ppNode;}}void RotateR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR){subLR->_parent = parent;}Node* ppNode = parent->_parent;subL->_right = parent;parent->_parent = subL;if (_root == parent){_root = subL;subL->_parent = nullptr;}else{if (ppNode->_left == parent){ppNode->_left = subL;}else{ppNode->_right = subL;}subL->_parent = ppNode;}}private:Node* _root = nullptr;
};
二、用泛型红黑树模拟实现set
#include "TRBTree.hPP"
namespace Jared
{template<class K>class set{//仿函数实现比较struct SetKeyOfT{const K& operator()(const K& key){return key;}};public:typedef typename RBTree<K, K, SetKeyOfT>::iterator iterator;//typename告诉编译器这一段代码是类型,不是静态变量iterator begin(){return _t.begin();}iterator end(){return _t.end();}pair<iterator, bool> insert(const K& key){return _t.Insert(key);}private:RBTree<K, K, SetKeyOfT> _t;};
}
三、用泛型红黑树模拟实现map
#include "TRBTree.hPP"
namespace Jared
{template<class K, class V>class map{//仿函数实现比较struct MapKeyOfT{const K& operator()(const pair<K, V>& kv){return kv.first;}};public:typedef typename RBTree<K, pair<K, V>, MapKeyOfT>::iterator iterator;//typename告诉编译器这一段代码是类型,不是静态变量iterator begin(){return _t.begin();}iterator end(){return _t.end();}pair<iterator, bool> insert(const pair<K, V>& kv){return _t.Insert(kv);}V& operator[](const K& key){pair<iterator, bool> ret = insert(make_pair(key, V()));return ret.first->second;}private:RBTree<K, pair<K, V>, MapKeyOfT> _t;};
}
相关文章:

深入浅出C++ ——红黑树模拟实现STL中的set与map
文章目录一、红黑树二、用泛型红黑树模拟实现set三、用泛型红黑树模拟实现map一、红黑树 红黑树作为set和map的底层容器,既要实现插入key又要实现插入pair,所以做了稍许的改动,使其成为一颗泛型结构的红黑树,通过不同的实例化参数…...

自动化测试框架设计
大数据时代,多数的web或app产品都会使用第三方或自己开发相应的数据系统,进行用户行为数据或其它信息数据的收集,在这个过程中,埋点是比较重要的一环。 埋点收集的数据一般有以下作用: 驱动决策:ABtest、漏…...
【虚拟仿真】Unity3D中实现鼠标的单击、双击、拖动的不同状态判断
推荐阅读 CSDN主页GitHub开源地址Unity3D插件分享简书地址我的个人博客 大家好,我是佛系工程师☆恬静的小魔龙☆,不定时更新Unity开发技巧,觉得有用记得一键三连哦。 一、前言 这篇文章分享一下虚拟仿真项目中经常碰到鼠标事件控制代码。 …...
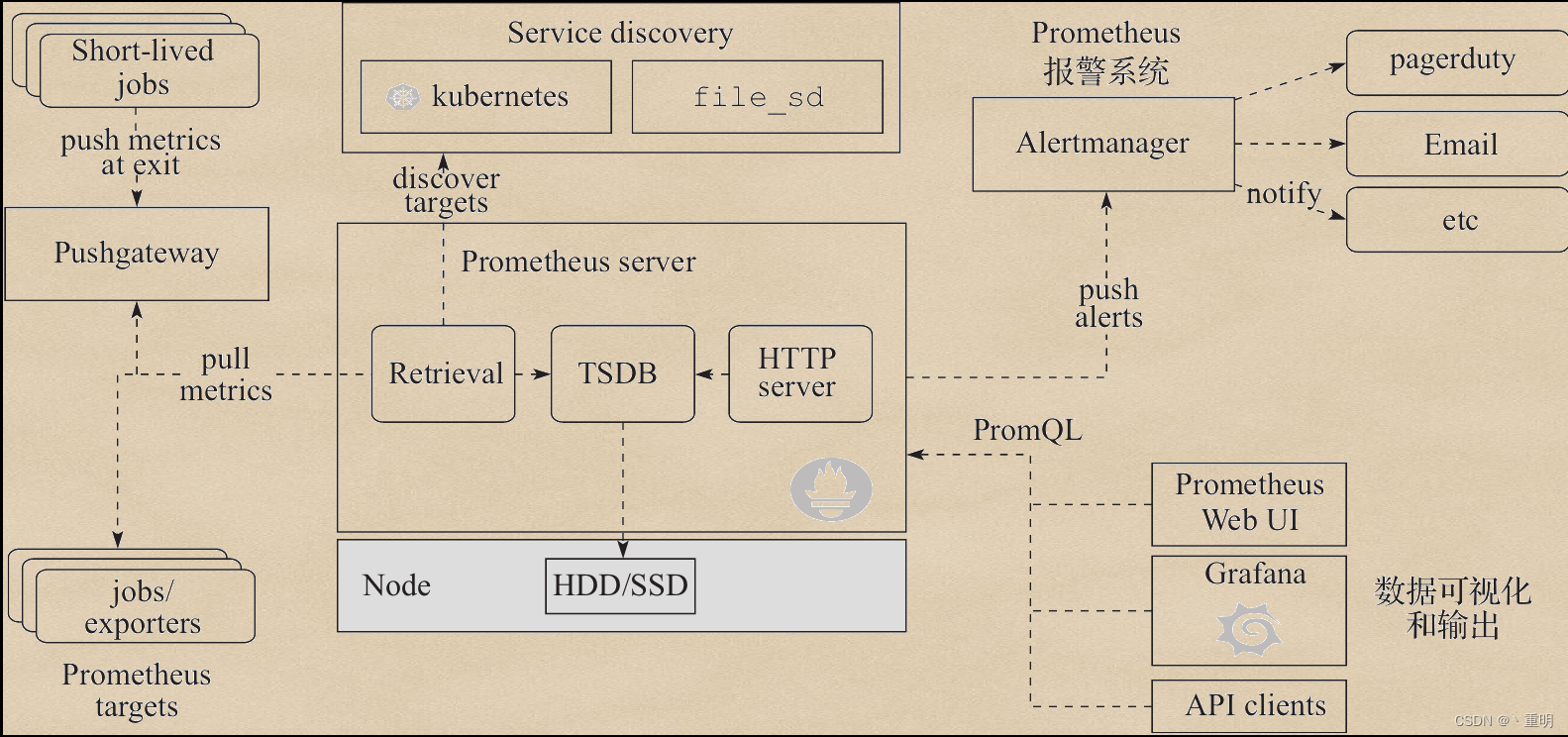
【2023】Prometheus-相关知识点(面试点)
目录1.Prometheus1.1.什么是Prometheus1.2.Prometheus的工作流程1.3.Prometheus的组件有哪些1.4.Prometheus有什么特点1.5.Metric的几种类型?分别是什么?1.6.Prometheus的优点和缺点1.7.Prometheus怎么采集数据1.8.Prometheus怎么获取采集对象1.9.Promet…...
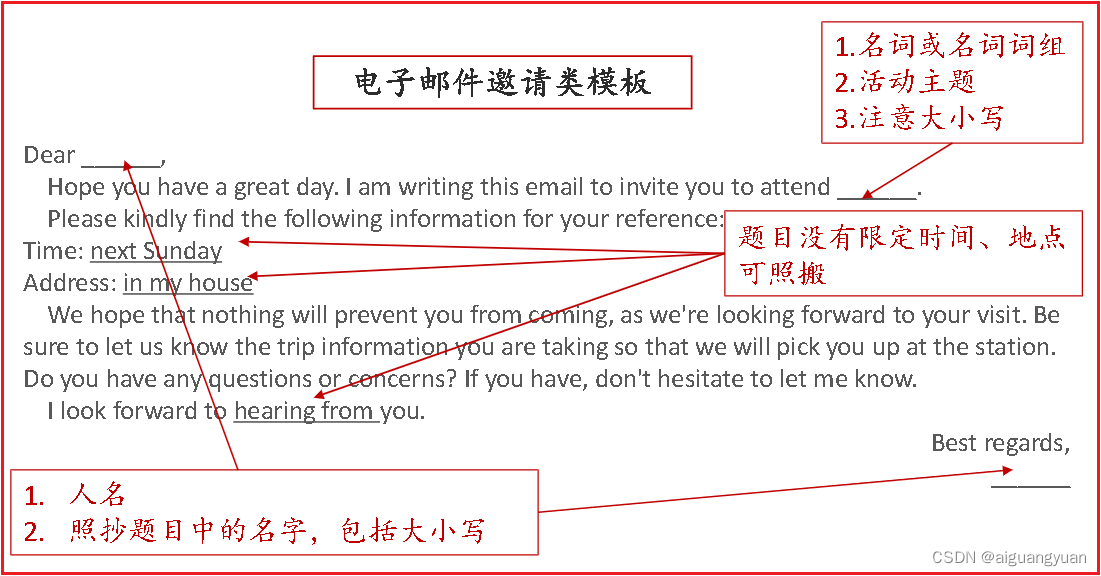
英语二-电子邮件邀请短文写作
1. 邮件模板 Dear 邀请人, Hope you have a great day. I am writing this email to invite you to attend 主题. Please kindly find the following information for your reference: Time: 时间 Address: 地点 We hope that nothing will prevent you from coming, as…...
如何快速一次性通过pmp考试?
我们就从三个方向进行了解 1.PMP考试难不难? 2.PMP如何备考? 3.考试过程中需要注意什么? 一,PMP考试难不难? 首先关注的问题是,PMP考试难吗?我想全球55%的通过率和学会这边93.9%的通过率&a…...

1-Linux 保存kernel panic信息到flash
在系统运行过程中,如果内核发生了panic,那么开发人员需要通过内核报错日志来进行定位问题。但是很多时候出现问题的时候没有接调试串口,而报错日志是在内存里面的,重启后就丢失了。所以需要一种方法,可以在系统发生crash时&#x…...

linux基本功系列-top命令实战
文章目录一. top命令介绍二. 语法格式及常用选项三. 参考案例3.1 显示进程信息3.2 显示完整的进程命令3.3 以批处理的形式展示3.4 设置信息更新频次3.5 显示指定进程号的信息3.6 top面板中常用参数3.7 其他用法四. top的相关说明4.1 交互命令介绍4.2 top面板每行信息的含义4.2.…...

6.5 拓展:如何实现 Web API 版本控制,同时兼容无版本控制的原始接口?
第6章 构建 RESTful 服务 6.1 RESTful 简介 6.2 构建 RESTful 应用接口 6.3 使用 Swagger 生成 Web API 文档 6.4 实战:实现 Web API 版本控制 6.5 拓展:如何实现 Web API 版本控制,同时兼容无版本控制的原始接口? 6.5 拓展&#…...

Springboot依赖注入Bean的三种方式,final+构造器注入Bean
文章目录Springboot依赖注入Bean的方式一、Field 注入/属性注入二、set注入三、构造器注入Springboot依赖注入Bean的方式 一、Field 注入/属性注入 Autowired注解的一大使用场景就是Field Injection。 Controller public class UserController {Autowiredprivate UserServic…...
【java】Spring Cloud --Spring Cloud Alibaba 微服务解决方案
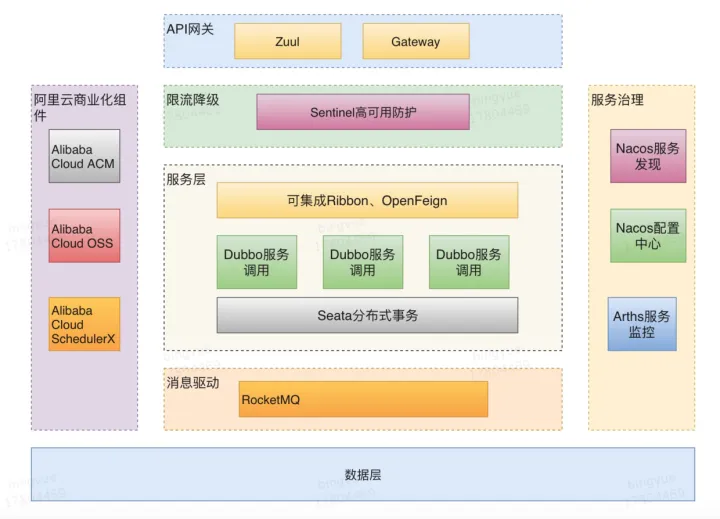
文章目录1、Spring Cloud Alibaba 是什么先说说 Spring CloudSpring Cloud Alibaba和Spring Cloud 的区别和联系Spring Cloud Alibaba2、Spring Cloud Alibaba 包含组件阿里开源组件阿里商业化组件集成 Spring Cloud 组件3、Spring Cloud Alibaba 功能服务注册与发现支持多协议…...
)
CSS 6种选择器(超详细)
CSS6大种选择器(超详细) 一、常用的css基本选择器(4种) 1、标签选择器 结构: 标签名{css属性名:属性值} 作用:通过标签名,找到页面中所有的这类标签,设置样式 注意:1.标签选择器选择的是一类标签&#…...
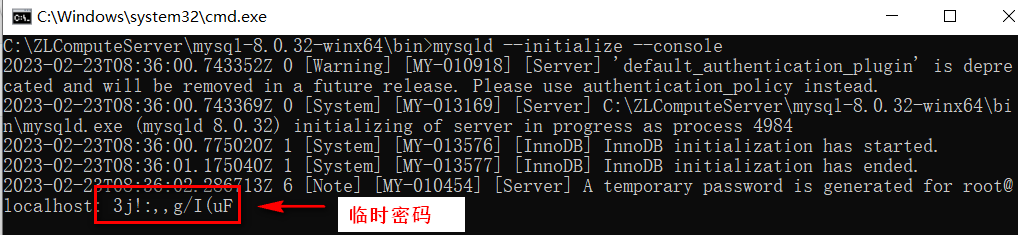
mysql8.0.32-手动配置安装-具体流程步骤
文章目录1.下载mysql压缩编译版2.修改配置文件3.数据库初始化,安装windows服务,启动服务4.修改root密码5.作者答疑1.下载mysql压缩编译版 作者从官方下载:https://download.csdn.net/download/m0_67316550/87485720 2.修改配置文件 修改my…...
【项目】Vue3+TS 退出登录 menu header搭建
💭💭 ✨:【项目】Vue3TS 退出登录 menu header搭建 💟:东非不开森的主页 💜: 今天永远比昨天更好💜💜 🌸: 如有错误或不足之处,希望可以指正&#x…...
LoRaWAN模块在车辆跟踪定位中的应用
目前 GPS已经在资产的管理中得到了越来越多的运用,如车辆跟踪、车队跟踪、资产监控等;人员跟踪,宠物跟踪,等等。在所有追踪装置中,最重要的是它的电池期望和监视距离。鉴于 LoRaWAN的功率消耗很小,而且能在…...

软件测试分类
软件测试分类 从上图我们发现软件测试根据不同的分类条件会有不同的结果. 1. 按照阶段进行划分 1.1 单元测试(Unit Testing) 单元测试是对软件组成单元进行测试。其目的是检验软件基本组成单位的正确性。测试的对象是软件设计的最小单位:模块。 测试阶段&#x…...

外置的媒体查询,对性能又一次的优化提升
通常情况下我们写媒体查询都是写在一个样式文件中,对于浏览器加载的时候,会解析到最后一行样式时才会渲染页面,这样就会造成页面的白屏时间过长。 但是通常情况下大量的媒体查询样式都是无用的,现在浏览器允许我们在引用样式文件…...
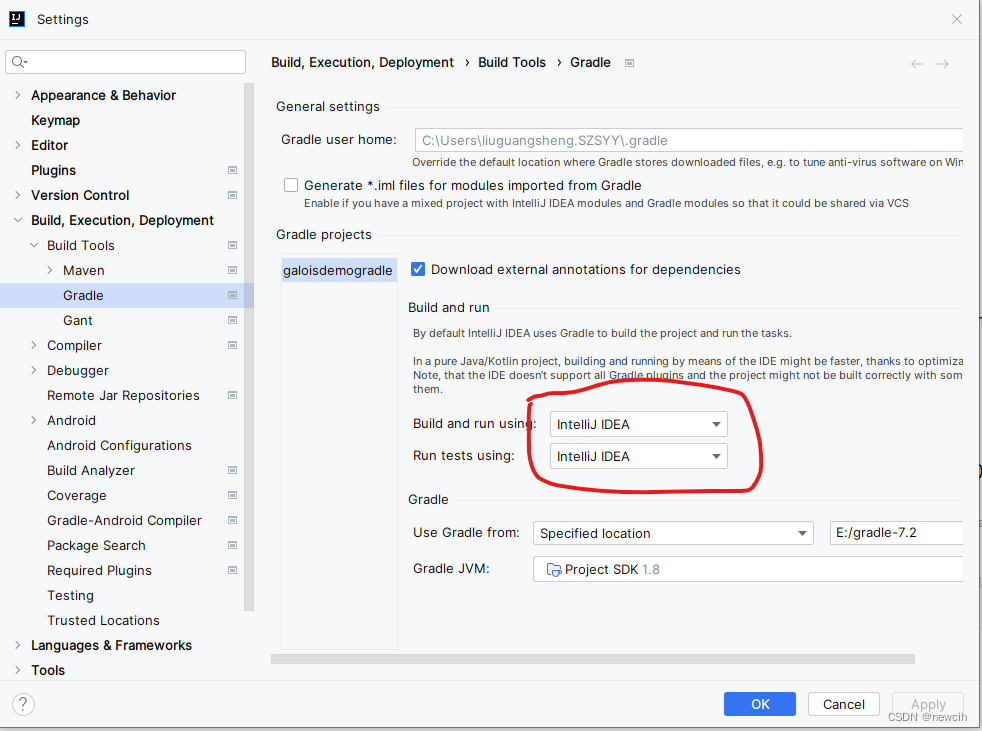
【Galois工具开发之路】关于IDEA的gradle工程执行两次premain的bug~
文章目录关于premain方法问题记录解决方式关于premain方法 是Java Agent技术的一种,通过 -javaagent: 的方式,添加外部代理,代理入口方法为 premain 。另一种Java Agent技术则是动态attach到java进程的方式,这种方式则是使用 age…...

云计算 概念与技术
如果我倡导的计算机在未来得到使用,那么有一天,计算也可能像电话一样成为共用设施。计算机应用将成为一全新的、重要的产业的基础。 ——John McCarthy 云计算的概念 定义 Garther公司的定义 一种计算方式,能通过Internet技术将可扩展的和…...

基于追踪标记的WAF设计思路
一 相关背景 目前,市面上的WAF产品通常采用”发现即阻断“的策略,以防护针对业务系统的Web攻击行为。虽然该策略可及时阻断攻击,但形式上过于简单,并不能有效掌握攻击者进一步的攻击意图,也不能有效提高攻击者的成本投…...
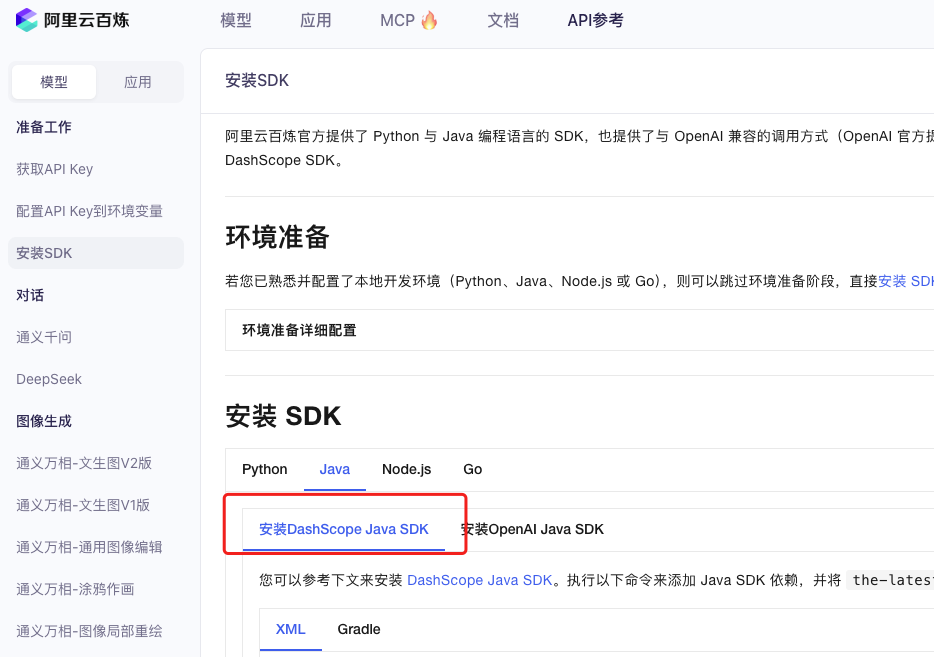
业务系统对接大模型的基础方案:架构设计与关键步骤
业务系统对接大模型:架构设计与关键步骤 在当今数字化转型的浪潮中,大语言模型(LLM)已成为企业提升业务效率和创新能力的关键技术之一。将大模型集成到业务系统中,不仅可以优化用户体验,还能为业务决策提供…...
: K8s 核心概念白话解读(上):Pod 和 Deployment 究竟是什么?)
云原生核心技术 (7/12): K8s 核心概念白话解读(上):Pod 和 Deployment 究竟是什么?
大家好,欢迎来到《云原生核心技术》系列的第七篇! 在上一篇,我们成功地使用 Minikube 或 kind 在自己的电脑上搭建起了一个迷你但功能完备的 Kubernetes 集群。现在,我们就像一个拥有了一块崭新数字土地的农场主,是时…...

基于Flask实现的医疗保险欺诈识别监测模型
基于Flask实现的医疗保险欺诈识别监测模型 项目截图 项目简介 社会医疗保险是国家通过立法形式强制实施,由雇主和个人按一定比例缴纳保险费,建立社会医疗保险基金,支付雇员医疗费用的一种医疗保险制度, 它是促进社会文明和进步的…...

连锁超市冷库节能解决方案:如何实现超市降本增效
在连锁超市冷库运营中,高能耗、设备损耗快、人工管理低效等问题长期困扰企业。御控冷库节能解决方案通过智能控制化霜、按需化霜、实时监控、故障诊断、自动预警、远程控制开关六大核心技术,实现年省电费15%-60%,且不改动原有装备、安装快捷、…...
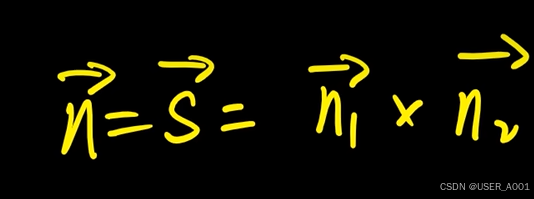
高等数学(下)题型笔记(八)空间解析几何与向量代数
目录 0 前言 1 向量的点乘 1.1 基本公式 1.2 例题 2 向量的叉乘 2.1 基础知识 2.2 例题 3 空间平面方程 3.1 基础知识 3.2 例题 4 空间直线方程 4.1 基础知识 4.2 例题 5 旋转曲面及其方程 5.1 基础知识 5.2 例题 6 空间曲面的法线与切平面 6.1 基础知识 6.2…...

高危文件识别的常用算法:原理、应用与企业场景
高危文件识别的常用算法:原理、应用与企业场景 高危文件识别旨在检测可能导致安全威胁的文件,如包含恶意代码、敏感数据或欺诈内容的文档,在企业协同办公环境中(如Teams、Google Workspace)尤为重要。结合大模型技术&…...
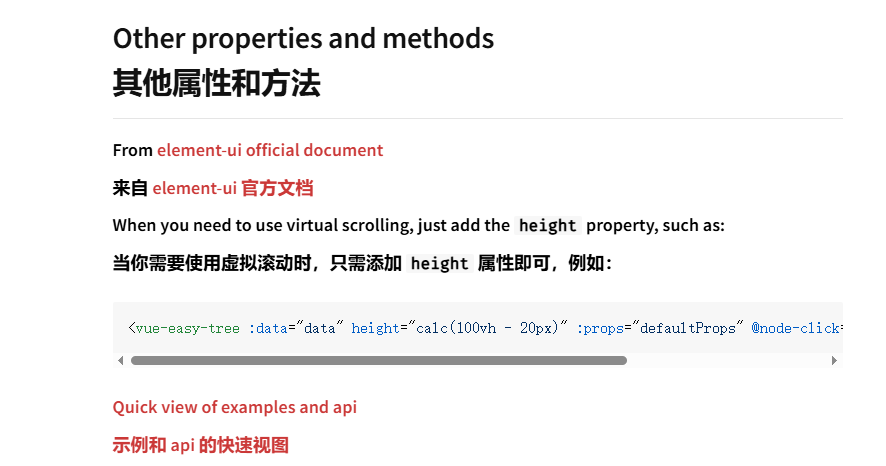
tree 树组件大数据卡顿问题优化
问题背景 项目中有用到树组件用来做文件目录,但是由于这个树组件的节点越来越多,导致页面在滚动这个树组件的时候浏览器就很容易卡死。这种问题基本上都是因为dom节点太多,导致的浏览器卡顿,这里很明显就需要用到虚拟列表的技术&…...

USB Over IP专用硬件的5个特点
USB over IP技术通过将USB协议数据封装在标准TCP/IP网络数据包中,从根本上改变了USB连接。这允许客户端通过局域网或广域网远程访问和控制物理连接到服务器的USB设备(如专用硬件设备),从而消除了直接物理连接的需要。USB over IP的…...

在QWebEngineView上实现鼠标、触摸等事件捕获的解决方案
这个问题我看其他博主也写了,要么要会员、要么写的乱七八糟。这里我整理一下,把问题说清楚并且给出代码,拿去用就行,照着葫芦画瓢。 问题 在继承QWebEngineView后,重写mousePressEvent或event函数无法捕获鼠标按下事…...
Netty从入门到进阶(二)
二、Netty入门 1. 概述 1.1 Netty是什么 Netty is an asynchronous event-driven network application framework for rapid development of maintainable high performance protocol servers & clients. Netty是一个异步的、基于事件驱动的网络应用框架,用于…...