无人机顶会顶刊2023
无人机顶会顶刊2023
- 国际期刊
- 1、Science Robotics
- 2、IEEE Transactions on Robotics(TRO)
- 3、IEEE Transactions on Automation Science and Engineering(TASE)
- 4、International Journal of Robotics Research(IJRR)
- 5、IEEE Robotics and Automation Letters(RA-L)
- 6、Journal of Field Robotics(JFR)
- 7、IEEE Robotics and Automation Magazine(RAM)
- 国际会议
- 1、Annual Conference on Robot Learning(CoRL)
- 2、 IEEE International Conference on Robotics and Automation (ICRA)
- 3、IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
- 4、International Joint Conference on Autonomous Agents and Multi-agent Systems(AAMAS)
- 机器学习/人工智能(会议)
- 1、ICML: International Conference on Machine Learning
- 2、NIPS: Conference on Neural Information Processing Systems
- 3、AAAI: Conference on Artificial Intelligence
- 4、IJCAI: International Joint Conference on Artificial Intelligence
- 机器视觉(会议)
- 1、CVPR: Conference on Computer Vision and Pattern Recognition
- 2、ICCV: International Conference on Computer Vision
- 3、ECCV: European Conference on Computer Vision
国际期刊
1、Science Robotics
- 中科院一区top,science子刊
- 致力于发表仿人机器人方向的研究
2、IEEE Transactions on Robotics(TRO)
- 中科院一区top
3、IEEE Transactions on Automation Science and Engineering(TASE)
- 中科院一区top
- 周期很长
4、International Journal of Robotics Research(IJRR)
- 中科院二区,老牌顶刊
注重实物创新和理论创新
机器人感知与运动规划
5、IEEE Robotics and Automation Letters(RA-L)
- 中科院二区,审稿速度快
- 适合一些较为小巧需要迅速发出来的工作
- 6页,最多8页
6、Journal of Field Robotics(JFR)
- 中科院二区
致力于提高非结构化和动态环境中机器人的研究
专注于野外(包括农林,海底,搜救,工地等),军事和太空机器人的实用研究
五篇幅限制
7、IEEE Robotics and Automation Magazine(RAM)
- 中科院二区
| 期刊 | IF | 分区 | IF | 分区 |
|---|---|---|---|---|
| Science Robotics | 23.748 | 1区top | 27.541 | 1区top |
| IEEE Transactions on Robotics(TRO) | 6.8 | 2区 | 7.8 | 1区top |
| IEEE Transactions on Automation Science and Engineering(TASE) | 2区 | 5.6 | 1区top | |
| International Journal of Robotics Research(IJRR) | 4.7 | 3区 | 6.8 | 2区 |
| IEEE Robotics and Automation Letters(RA-L) | 4.3 | 2区 | 5.2 | 2区 |
| Journal of Field Robotics(JFR) | 3.7 | 2区 | 6.3 | 2区 |
| IEEE Robotics and Automation Magazine(RAM) | 3.5 | 2区 | 5.0 | 2区 |
国际会议
1、Annual Conference on Robot Learning(CoRL)
- 新晋会议,侧重机器人和机器学习结合
- 核心点:模型要新颖,要解决实际问题,一定要有真实数据验证,纯仿真肯定挂。
2、 IEEE International Conference on Robotics and Automation (ICRA)
- 接受率40%,核心点:解决的问题一定要具有独特的意义,并且算法是为问题服务的。可以拼接,可以仿真,但一定要有实际问题,一定要可解释。
3、IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
- 接受率40-50%,很简单,收录的很杂
4、International Joint Conference on Autonomous Agents and Multi-agent Systems(AAMAS)
| 会议 | 投稿时间 | 结果时间 | 页数 | CCF | 接受率 |
|---|---|---|---|---|---|
| CoRL | 0515 | 0910 | 8页单+ | 40% | |
| ICRA | 0915 | 0131 | 6页双+ | B | 40% |
| IROS | 0301 | 0630 | 6页双栏 | C | 40-50% |
| AAMAS | 1009 | 1220 | 8页双+ | B | 23% |
机器学习/人工智能(会议)
1、ICML: International Conference on Machine Learning
2、NIPS: Conference on Neural Information Processing Systems
3、AAAI: Conference on Artificial Intelligence
4、IJCAI: International Joint Conference on Artificial Intelligence
机器视觉(会议)
1、CVPR: Conference on Computer Vision and Pattern Recognition
2、ICCV: International Conference on Computer Vision
3、ECCV: European Conference on Computer Vision
| 会议 | 投稿时间 | 结果时间 | 页数 | CCF | 接受率 |
|---|---|---|---|---|---|
| ICML | 0109 | 0426 | 8+ | A | |
| IJCAI | 0104 | 0419 | 7+2 | A | |
| IROS | 0301 | 0630 | 6页双栏 | C | 40-50% |
| ICCV | 0308 | 0713 | 8页单栏 | A | |
| ECCV | 0307 | 0703 | 8页单栏 | B | |
| CoRL | 0515 | 0910 | 8页单+ | 40% | |
| NIPS | 0517 | 0922 | 8+ | A | |
| AAAI | 0711 | 1118 | 7+ | A | |
| ICRA | 0915 | 0131 | 6页双+ | B | 40% |
| AAMAS | 1009 | 1220 | 8页双+ | B | |
| CVPR | 1111 | 0227 | 8页单栏 | A |
版权归版主所有
相关文章:

无人机顶会顶刊2023
无人机顶会顶刊2023 国际期刊1、Science Robotics2、IEEE Transactions on Robotics(TRO)3、IEEE Transactions on Automation Science and Engineering(TASE)4、International Journal of Robotics Research(IJRR)5、IEEE Robotics and Automation Lett…...

【Java毕设项目】基于SpringBoot+Vue校园便利平台的设计与实现
博主主页:一季春秋博主简介:专注Java技术领域和毕业设计项目实战、Java、微信小程序、安卓等技术开发,远程调试部署、代码讲解、文档指导、ppt制作等技术指导。主要内容:毕业设计(Java项目、小程序等)、简历模板、学习资料、面试题…...

03Nginx的静态资源部署,反向代理,负载均衡,动静分离的配置
Nginx具体应用 部署静态资源 Nginx相对于Tomcat处理静态资源的能力更加高效,所以在生产环境下一般都会将Nginx可以作为静态web服务器来部署静态资源 静态资源: 在服务端真实存在并且能够直接展示的一些html页面、css文件、js文件、图片、视频等资源文件将静态资源部署到Ngin…...

刷题笔记24——完全二叉树的节点个数
有些事情是不能告诉别人的,有些事情是不必告诉别人的,有些事情是根本没有办法告诉别人的,而且有些事情是,即使告诉了别人,你也会马上后悔的。——罗曼罗兰 222. 完全二叉树的节点个数 java的幂运算要 (int) Math.pow(2,l1)-1计算满二叉树的节点数量公式:2 ^ height…...

sentinel环境搭建以及微服务接入
• sentinel部署 • sentinel-镜像制造 • sentinel-镜像推送 • sentinel-部署配置文件 • 访问控制台 • 外网访问控制台 • 集群内访问 • 配置规则 • 限流效果 • 微服务接入 • pom文件引入依赖 • pod部署文件添加配置 Sentinel 控制台是流量控制、熔断降级规则统一配置…...

Klotski: Efficient Obfuscated Execution against Controlled-Channel Attacks
标题:Klotski: Efficient Obfuscated Execution against Controlled-Channel Attacks 作者:Pan Zhang,Chengyu Song,Heng Yin,Deqing Zou,Elaine Shi and Hai Jin 发布:ASPLOS【计算机体系结构顶会】 时间:2020 摘要 Intel Soft…...

阿里云无影云电脑角色AliyunServiceRoleForGws什么意思?
阿里云无影云电脑服务关联角色是指角色名称:AliyunServiceRoleForGws,并赋予角色权限策略:AliyunServiceRolePolicyForGws的过程,简单来说,就是允许无影云电脑服务访问您VPC、CEN和NAS中的资源,使用该权限查…...

操作系统--------调度算法篇
目录 一.先来先服务调度算法(FCFS) 二.短作业优先调度算法(SJF) 2.1.SJF调度算法缺点 三.优先级调度算法 3.1优先级调度算法的类型 1.非抢占优先级调度算法 2.抢占优先级调度算法 3.2优先级的类型 3.1静态优先级 3.2动态…...

宝塔composer 安装laravel依赖出现的问题
环境宝塔、PHP版本8.0.2、laravel9 问题1:PHP Fatal error: Uncaught Error: Call to undefined function Composer\XdebugHandler\putenv() 办法:把PHP版本disable_functions这个中的putenv去掉,这个意思就是putenv被PHP对应的版本禁用了&…...

OpenCV自学笔记二十四:支持向量机
在OpenCV中,支持向量机(Support Vector Machine,简称SVM)算法的实现包含在ml模块中。SVM是一种常用的监督学习算法,主要用于分类问题。 SVM的原理:通过在特征空间中找到一个最优超平面,将不同类…...

网络初识
一 IP 地址 概念: IP 地址主要用于表示网络主机、其他网络设备(如路由器)的网络地址。简单说,IP地址用于定位主机的网络地址 格式 IP 地址是一个32为的二进制数,通常被分割为4个“8位二进制数“(也就是4个字节&…...

极坐标和直角坐标的雅克比矩阵推导
我们经常需要在一些问题中研究坐标系的关系,这里讲讲最常见的极坐标和直角坐标的雅克比矩阵的推导。以二维坐标为例,三维坐标也是同理。 1. 直角坐标和极坐标 直角坐标表示为 ( x , y ) (x,y) (x,y),极坐标表示为 ( ρ , φ ) (\rho,\varph…...

经管博士科研基础【25】概率论中的相关基础概念
1. Support 在概率论中,"support"(支撑集)是指随机变量可能取值的集合。对于离散型随机变量,支撑集包含了所有可能的取值;而对于连续型随机变量,支撑集是指其密度函数或概率质量函数非零的区域。…...
)
计算机网络的相关知识点总结(一)
1.谈一谈对OSI七层模型和TCP/IP四层模型的理解? 不管是OSI七层模型亦或是TCP/IP四层模型,它们的提出都有一个共同的目的:通过分层来将复杂问题细化,通过各个层级之间的相互配合来更好的解决计算机中出现的问题。 说到分层…...
下载github.com上的依赖资源
下载github.com上的依赖资源(需要反复试才能成功,所以单独安装) export GIT_TRACE1 export GIT_CURL_VERBOSE1 pip install githttps://github.com/PanQiWei/AutoGPTQ.git -i https://pypi.mirrors.ustc.edu.cn/simple --trusted-hostpypi.mi…...

编写 GPT 提示词的公式 + 资源分享
GPT 能够给我们带来很大的帮助,因此我们要好好利用它。我们希望 GPT 输出令我们满意的内容,影响 GPT 输出内容的因素有模型和输入(Prompt,提示词)。 模型:我们可以选择不同的 GPT 产品,它们的模…...

用HTML、CSS和JavaScript制作的通用进制转换器
随着编程和计算机科学越来越受欢迎,我们经常需要进行进制转换。本文将介绍一个简洁、美观、适用于移动设备的进制转换工具,并详细讨论其实现。 目录 🌍 用HTML、CSS和JavaScript制作的通用进制转换器 1.项目图片展示 2. 技术栈 3. 主要功…...
ArcGIS 10.3软件安装包下载及安装教程!
【软件名称】:ArcGIS 10.3 【安装环境】:Windows 【下载链接 】: 链接:https://pan.baidu.com/s/1K5ab7IHMYa23HpmuPkFa1A 提取码:oxbb 复制这段内容后打开百度网盘手机App,操作更方便哦 软件解压码点击原文…...

【数据增强】
【数据增强】 1 数据增强的情形2 数据增强的方法 1 数据增强的情形 当数据比较小,难以获取新的训练数据时,可以考虑数据增强,如随机裁剪部分,随机左右上下翻转、随机旋转一个角度、随机亮度变化等微小变化,数据的多样…...

Ae 效果:CC Force Motion Blur
时间/CC Force Motion Blur Time/CC Force Motion Blur CC Force Motion Blur (CC 强制运动模糊)主要用于为动态图像添加强制的运动模糊效果,增加动态画面的流畅感和真实感。 相对于时间轴面板上的“运动模糊”开关,CC Force Moti…...
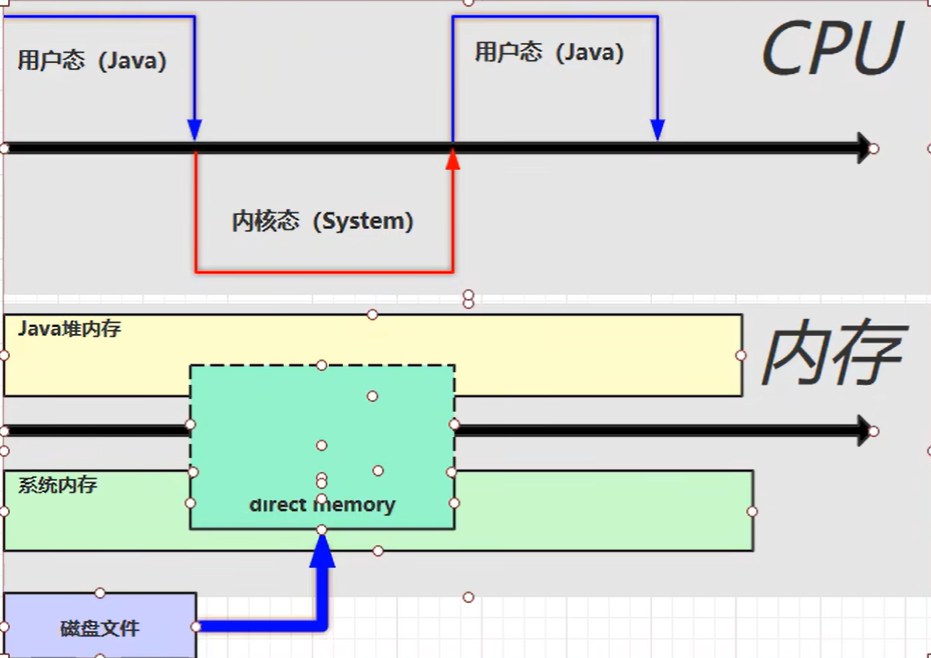
【JVM】- 内存结构
引言 JVM:Java Virtual Machine 定义:Java虚拟机,Java二进制字节码的运行环境好处: 一次编写,到处运行自动内存管理,垃圾回收的功能数组下标越界检查(会抛异常,不会覆盖到其他代码…...

基础测试工具使用经验
背景 vtune,perf, nsight system等基础测试工具,都是用过的,但是没有记录,都逐渐忘了。所以写这篇博客总结记录一下,只要以后发现新的用法,就记得来编辑补充一下 perf 比较基础的用法: 先改这…...

论文浅尝 | 基于判别指令微调生成式大语言模型的知识图谱补全方法(ISWC2024)
笔记整理:刘治强,浙江大学硕士生,研究方向为知识图谱表示学习,大语言模型 论文链接:http://arxiv.org/abs/2407.16127 发表会议:ISWC 2024 1. 动机 传统的知识图谱补全(KGC)模型通过…...

C# SqlSugar:依赖注入与仓储模式实践
C# SqlSugar:依赖注入与仓储模式实践 在 C# 的应用开发中,数据库操作是必不可少的环节。为了让数据访问层更加简洁、高效且易于维护,许多开发者会选择成熟的 ORM(对象关系映射)框架,SqlSugar 就是其中备受…...
k8s业务程序联调工具-KtConnect
概述 原理 工具作用是建立了一个从本地到集群的单向VPN,根据VPN原理,打通两个内网必然需要借助一个公共中继节点,ktconnect工具巧妙的利用k8s原生的portforward能力,简化了建立连接的过程,apiserver间接起到了中继节…...

return this;返回的是谁
一个审批系统的示例来演示责任链模式的实现。假设公司需要处理不同金额的采购申请,不同级别的经理有不同的审批权限: // 抽象处理者:审批者 abstract class Approver {protected Approver successor; // 下一个处理者// 设置下一个处理者pub…...

从“安全密码”到测试体系:Gitee Test 赋能关键领域软件质量保障
关键领域软件测试的"安全密码":Gitee Test如何破解行业痛点 在数字化浪潮席卷全球的今天,软件系统已成为国家关键领域的"神经中枢"。从国防军工到能源电力,从金融交易到交通管控,这些关乎国计民生的关键领域…...

用 Rust 重写 Linux 内核模块实战:迈向安全内核的新篇章
用 Rust 重写 Linux 内核模块实战:迈向安全内核的新篇章 摘要: 操作系统内核的安全性、稳定性至关重要。传统 Linux 内核模块开发长期依赖于 C 语言,受限于 C 语言本身的内存安全和并发安全问题,开发复杂模块极易引入难以…...

字符串哈希+KMP
P10468 兔子与兔子 #include<bits/stdc.h> using namespace std; typedef unsigned long long ull; const int N 1000010; ull a[N], pw[N]; int n; ull gethash(int l, int r){return a[r] - a[l - 1] * pw[r - l 1]; } signed main(){ios::sync_with_stdio(false), …...

Python第七周作业
Python第七周作业 文章目录 Python第七周作业 1.使用open以只读模式打开文件data.txt,并逐行打印内容 2.使用pathlib模块获取当前脚本的绝对路径,并创建logs目录(若不存在) 3.递归遍历目录data,输出所有.csv文件的路径…...