【PID控制技术】
PID控制技术
- 简介
- 控制原理
- 相关术语
- 调参技巧
- 相互作用
- 相似算法
- 与PWM对比
- 应用范围
- 优缺点
- 硬件支持
简介
PID控制是一种在工业过程控制中广泛应用的控制策略,其全称是比例-积分-微分(Proportional Integral Derivative)控制。它的基本原理是根据期望值与实际值的比较,产生一个误差信号,然后对这个误差信号进行比例、积分和微分三个环节的处理,以产生一个控制信号,最后用这个控制信号去调节被控对象的输出,以达到减小误差、提高控制精度的目的。
控制原理
假设我们有一个小车,我们希望通过控制其电机转速来达到一个目标轨迹。我们可以通过以下步骤来实现这个目标:
设定目标:我们设定一个目标轨迹,比如从A点移动到B点,需要小车按照这个轨迹行驶。
采集数据:我们使用编码器等传感器来测量小车的实际位置和速度,并与目标轨迹进行比较,得出偏差。
比例控制:根据偏差的大小,我们通过比例控制器来调整电机的转速。比如,如果小车偏离目标轨迹,我们可以通过增加电机的转速来使小车回归到目标轨迹。这是比例控制器的功劳。
积分控制:除了比例控制外,我们还需要考虑偏差的累积。如果小车在偏离目标轨迹后一直未回归,那么比例控制器将不断调整电机的转速,使小车回归目标轨迹。这是积分控制器的功劳。
微分控制:除了比例和积分控制外,我们还需要考虑偏差的变化率。如果小车即将偏离目标轨迹,我们可以提前调整电机的转速,使小车提前回归目标轨迹。这是微分控制器的功劳。
通过以上步骤,我们就成功地利用PID控制器来控制小车的电机转速,使其按照我们设定的目标轨迹行驶。
相关术语
偏差:这是期望状态与当前状态的差异,通过眼睛(观测器)观测得到。例如,小车编码电机中,偏差=目标值转速(编码器值)-编码器采集值。
比例控制:根据比例增益,计算比例调整量P = Kp * error。比例增益(Kp)是调节控制器输出的一个参数,error是当前状态和目标状态之间的差值。
积分控制:根据积分增益,计算积分调整量I = Ki * ∫(error dt)。积分增益(Ki)是另一个调节控制器输出的参数,∫(error dt)表示error在时间上的累积。
微分控制:根据微分增益,计算微分调整量D = Kd * d(error)/dt。微分增益(Kd)是调节控制器输出的又一个参数,d(error)/dt表示error随时间的变化率。
PID控制器是一种线性控制器,它通过负反馈调节过程来达到目标值,如水温的恒温控制,电机转速控制,舵机打角控制等。PID控制过程就是给定目标值,观察实际值,得出偏差,然后根据偏差进行比例、积分、微分控制,并将这些控制量作用于被控对象上,使其达到并在给定值附近稳定。
调参技巧
- 首先给大家简单介绍一下PIDPID就是通过系统误差利用比例、积分、微分计算出控制量进行控制的。不同厂家的公式稍有不同,但是基本上都离不开三个参数:比例、积分时间、微分时间。
- 采样周期在进行PID调节之前要先设定好PID的采样周期,采样周期设定主要根据被控对象的特性决定。被控对象变化快的(如:流量),可将采样周期设定在100ms左右,采样周期变化慢的(如:液位)可将采样周期设定在1000ms,对于特别缓慢的(如:温度)可设置成5-10S。简单的理解是多长时间比较一次采样值与设定值。当然需要注意的是,采样周期必须大于程序的执行周期(PLC的运行周期)。
- 比例比例作用是依据偏差的大小来动作.比例有时又被称为增益用Gain表示,当控制量与被控量成正比例关系时(例如:阀位与流量)增益为正数;当控制量与被控量成反比例关系时(例如:液位与频率)增益。
- 积分时间积分时间是PID参数的关键之一。它的主要作用是消除系统的稳态误差。积分时间通常需要通过实验和经验来确定,它与系统的采样周期和滞后时间有关。在选择积分时间时,需要权衡系统的稳定性和响应速度。较小的积分时间可能会导致系统频繁振荡,而较大的积分时间则会降低系统的响应速度。
- 微分时间微分时间是PID参数中反应系统未来误差的重要因素。微分时间的设定需要考虑系统的动态性能和稳定性。较大的微分时间有助于减小系统的动态误差,但可能会导致系统稳定性降低。微分时间的设定需要经验丰富的工程师进行调试,通常可以通过试错法进行确定。
- 比例、积分、微分三者之间的关系比例、积分和微分三者之间存在密切的关系。比例调节是快速的,但它不能消除稳态误差。积分调节可以消除稳态误差,但需要牺牲系统的响应速度。微分调节可以预测未来的误差,但需要避免系统出现振荡。在调整PID参数时,需要综合考虑三者之间的关系,以实现系统的最佳控制效果。
7.PID调试过程中的注意事项在调试PID参数时,需要注意以下几点:首先,先调比例,再调积分,最后调微分。其次,观察系统的响应速度和超调量,如果存在振荡或超调量过大,可能需要调整积分时间和微分时间。最后,调试过程中要保持系统的稳定性,避免系统出现频繁的振荡。
8.PID参数的在线调整在实际应用中,PID参数通常需要进行在线调整。在线调整是通过实时采集系统的数据,根据系统响应情况对PID参数进行调整的过程。在线调整需要经验丰富的工程师进行操作,以确保系统的稳定性和响应速度。
相互作用
首先,比例单元(P)的作用是按比例反应系统的偏差。当系统出现偏差时,比例单元会立即产生调节作用,减小偏差。具体来说,如果系统的当前状态与期望状态之间存在差异,比例单元会根据这个差异的大小和方向,按比例产生一个调节信号,这个信号会作用于系统,使其向消除偏差的方向运动。
然后,积分单元(I)的作用是消除系统的稳态误差。当系统存在稳态误差时(即系统无法达到期望状态,一直存在一个微小的偏差),积分单元会对这个误差进行积分,即计算误差随着时间的变化量。这个积分值会作为一个调节信号,对系统进行进一步的调节,直至消除稳态误差。
最后,微分单元(D)的作用是反应系统的未来误差。微分单元会对系统的未来状态进行预测,并计算预测值与期望值之间的误差。这个误差的变化率(即微分值)会被作为调节信号,提前对系统进行调节,以避免在未来出现大的误差。
PID这三个单元各有侧重,但又相互配合,共同作用,使得系统能够快速、准确地对各种复杂的工况进行响应,并达到期望的控制效果。
相似算法
PID调节和以下几种控制算法相似:
- 比例积分微分控制算法(PI控制算法)。PI控制算法是在PID算法的基础上去掉微分项得到的一种算法,只包含比例控制和积分控制。与PID相比,PI算法更加稳定,能够减少振荡和过冲现象。
- 比例积分控制算法(P控制算法)。P控制算法是在PID算法的基础上去掉积分项和微分项得到的一种算法,只包含比例控制。与PID相比,P算法更加简单,并且能够在一定程度上控制系统性能。
除上述控制算法之外,还存在其他与PID调节相似的算法,如模糊控制、自适应控制等。这些算法在处理复杂和非线性系统方面具有优势,可以在特定情况下实现更好的控制效果。
与PWM对比
PID控制和PWM控制是两种常用的控制技术,它们在不同的应用中有不同的作用和工作原理。
PWM控制是通过调整脉冲的占空比来控制输出信号的平均电平。它是通过周期性地开关电源,控制开关时间和关闭时间的比例,从而控制所需的输出。PWM控制常用于需要模拟连续信号的应用,例如直流电机速度控制、LED亮度调节、音频放大器等,它适用于那些可以通过调整脉冲宽度来控制的设备或系统。
PID控制是一种基于反馈的控制算法,根据当前误差、误差积分和误差变化率的信息,计算出一个控制量,用于调节输出,以使系统的实际值与期望值尽可能接近。PID控制适用于需要精确控制和稳定性的应用,例如温度控制、位置控制、速度控制等。PID控制具有自适应能力,可以根据实际情况动态调整控制参数。
在某些应用中,PID和PWM可以结合使用。例如,在电机控制系统中,PID控制可以用于调节电机的速度和位置,而PWM控制可以用于调节电机的电流和电压。两者的结合使用可以实现更精确的电机控制。
应用范围
PID控制算法在以下领域中有广泛应用:
温度控制:在工业过程、热处理、恒温箱等方面,PID控制算法可以实现对温度的精确控制。
机械控制:在电机速度控制、位置控制、压力控制等方面,PID控制算法可以实现机械系统的精确控制。
液位控制:在液位高度控制、油罐液位控制等方面,PID控制算法可以实现液位的精确控制。
流量控制:在化工流程控制、供水系统控制等方面,PID控制算法可以实现对流量的精确控制。
此外,PID控制算法还应用于速度控制、位置控制、飞行器姿态控制、汽车稳定性控制、电力调度等各个领域。总的来说,PID控制算法适用于需要自动控制和调节的各种物理过程,使其达到预定的控制目标。
优缺点
PID控制器被广泛应用于各种控制系统中,其主要的优点有:
- PID算法蕴涵了动态控制过程中过去、现在、将来的主要信息,并且配置几乎最优。比例(P)代表当前的信息,起纠正偏差的作用,使过程反应迅速。微分(D)在信号变化时有 超前控制作用,代表将来的信息。在过程开始时强迫过程进行,过程结束时减小超调,克服振荡,提高系统的稳定性,加快系统的过渡过程。积分(I)代表了过去积累的信息,能消除静差,改善系统的静态特性。
- PID控制适应性好,有较强的鲁棒性,对各种工业场合,都可在不同的程度上应用。特别适于“一阶惯性环节+纯滞后”和“二阶惯性环节+纯滞后”的过程控制对象。
- PID算法简单明了,各个控制参数相对较为独立,参数的选定较为简单,形成了完整的设计和参数调整方法,很容易为工程技术人员所掌握。
- PID控制根据不同的要求,针对自身的缺陷进行了不少改进,形成了一系列改进的PID算法。例如,为了克服微分带来的高频干扰的滤波PID控制;为克服大偏差时出现饱和超调的PID积分分离控制等。
然而,PID控制器也存在一些缺点:
5. PID控制器对参数调整的要求比较高,如果参数调整不当,可能会导致系统性能不佳。
6. PID控制器对反馈信号的依赖度高,如果反馈信号受到干扰或者出现故障,系统的性能也会受到影响。
7. PID控制器对噪声敏感,如果系统中存在噪声,可能会导致控制系统出现震荡或者不稳定。
8. PID控制器可能存在积分饱和的问题,如果积分项发生饱和,可能会导致控制系统出现稳态误差或者振荡。
硬件支持
PID控制需要以下硬件支持:
控制器:PID控制算法需要一个控制器来实现。控制器可以是嵌入式系统、单片机、PLC等,用于接收输入信号,根据PID算法计算输出信号,并将输出信号传递给被控对象。
执行器:PID控制的执行器是用于将控制信号转换为实际动作的装置。常见的执行器包括电动机、气缸、液压马达等。
反馈装置:PID控制需要一个反馈装置来检测被控对象的输出信号,并将其反馈给控制器。反馈装置可以是传感器、编码器等。
电源:PID控制系统的电源是用于提供能量的设备。对于不同的被控对象和控制器,需要选择相应的电源来提供合适的能量。
此外,根据具体的被控对象和控制系统要求,可能还需要其他辅助设备,如信号转换器、继电器、接触器等。
相关文章:

【PID控制技术】
PID控制技术 简介控制原理相关术语调参技巧相互作用 相似算法与PWM对比 应用范围优缺点硬件支持 简介 PID控制是一种在工业过程控制中广泛应用的控制策略,其全称是比例-积分-微分(Proportional Integral Derivative)控制。它的基本原理是根据…...

docker openjdk:8-jdk-alpine 修改时区、添加字体
新建Dockerfile文件,制作新镜像 FROM openjdk:8-jdk-alpine 1、解决字体问题 RUN apk add --update ttf-dejavu fontconfig && rm -rf /var/cache/apk/* 2、解决时差问题 # 解决时差8小时问题ENV TZAsia/ShanghaiRUN ln -snf /usr/share/zoneinfo/$TZ /et…...
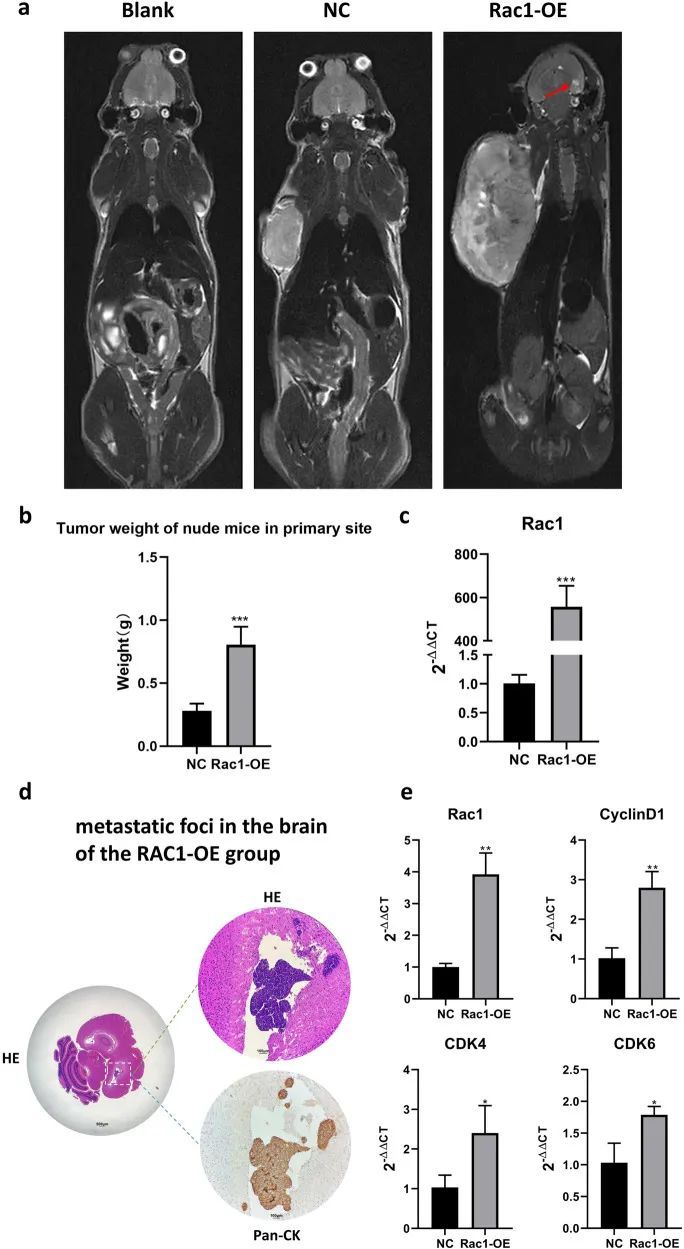
9+单细胞+实验验证,探讨单基因对癌细胞转移作用的思路方向
今天给同学们分享一篇单细胞实验的生信文章“Identification of RAC1 in promoting brain metastasis of lung adenocarcinoma using single-cell transcriptome sequencing”,这篇文章于2023年5月18日发表在Cell Death Dis期刊上,影响因子为9。 本研究旨…...
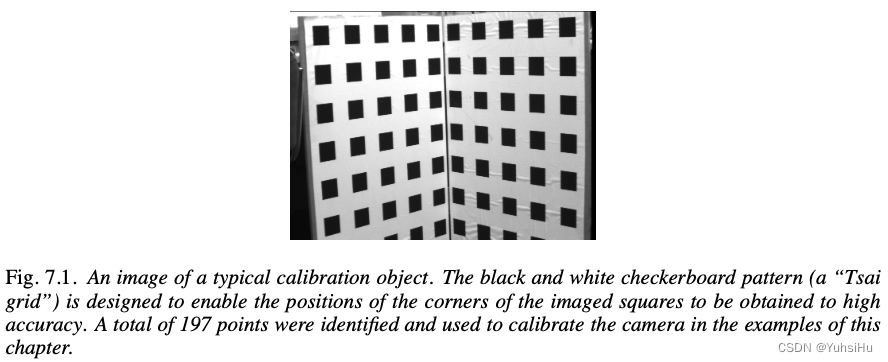
《计算机视觉中的多视图几何》笔记(7)
7 Computation of the Camera Matrix P P P 这章讲的是摄像机参数估计。摄像机标定,本质上就是求摄像机矩阵 P P P,当我们知道足够多的 X ↔ x X \leftrightarrow x X↔x,我们该如何计算 P P P?如果知道3D和2D点的对应ÿ…...

Python经典练习题(四)
文章目录 🍀第一题🍀第二题🍀第三题 🍀第一题 题目:打印出如下图案(菱形): 我们首先分析一下,本题实现的步骤主要有两个,分别是前四行和后三行 前四行:第一…...

Mac Pro在重装系统时提示“未能与恢复服务器取得联系”
检查网络连接: 确保你的Mac Pro连接到稳定的网络。尝试更换其他网络,例如切换到不同的Wi-Fi或使用有线连接。 系统时间校正: 错误的系统时间有时会导致与恢复服务器的连接问题。在恢复模式下打开终端(在实用工具菜单中选择终端&a…...

【C/C++】指针常量、常量指针、指向常量的常指针
目录 1.概念2. const pointer3. pointer to a constant3.1 (pointer to a constant)-constant3.2 poiner-constant3.3 (pointer to a constant)-variable3.4 poiner-variable3.5 多层级关系时的兼容3.6 用处 4. a constant pointer to a constant 1.概念 首先明确这几个术语的…...
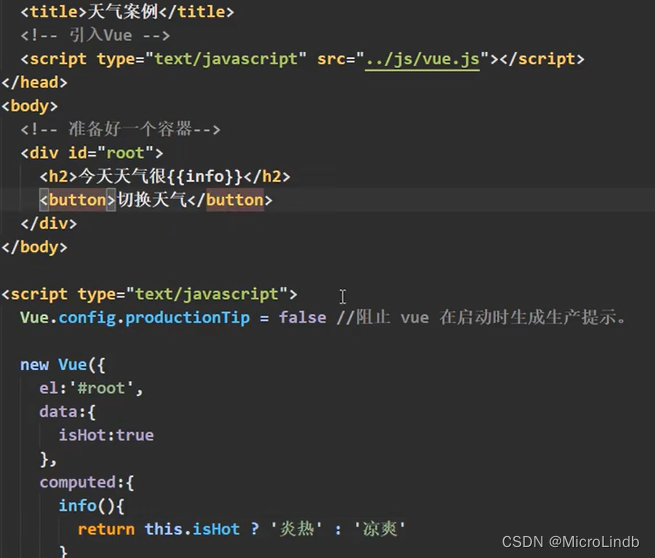
【VUE复习·4】计算属性computed:原理、完整写法(不常用)、与 methods 的区别、简写(最常用)、应用案例!
总览 1.简介计算属性 2.computed 与 methods 的区别 3.computed 的简写(不修改计算属性,只显示) 4.经典应用场景 一、计算属性 1.为什么需要计算属性? 首先,如果我们要写一个插值语法,而 {{ }} 内的内容…...

Linux 基本语句_编译C过程
Linux撰写C语言并编译的过程 1、预处理 将所有的#define删除,并且展开所有的宏定义,并且处理所有的条件预编译指令,比如#if #ifdef #elif #else #endif等。处理#include预编译指令,将被包含的文件插入到该预编译指令的位置。删除…...

MYSQL8解压版 windows 主从部署步骤及配置(包含配置文件,教程文件,免积分下载)
MYSQL8解压版 windows 主从部署步骤及配置 一.安装MSYQL 这里只讲大概,详细步骤、my.ini文件、安装包等会在页尾文件中(正常情况按首个mysql安装,只是名字有区别) 1.主库my.ini配置 [mysqld] #典型的值是5-6GB(8GB内存),8-11GB(16GB内存), 20-25GB(32GB内存)&…...

RabbitMQ的基本介绍
什么是MQ 本质是一个队列,只不过队列中存放的信息是message罢了,还是一种跨进程的通信机制,用于上下游传递信息。在互联网架构中,MQ是一种非常常见的上下游“逻辑解耦物理解耦”的消息通信服务。使用了MQ之后,信息发送…...
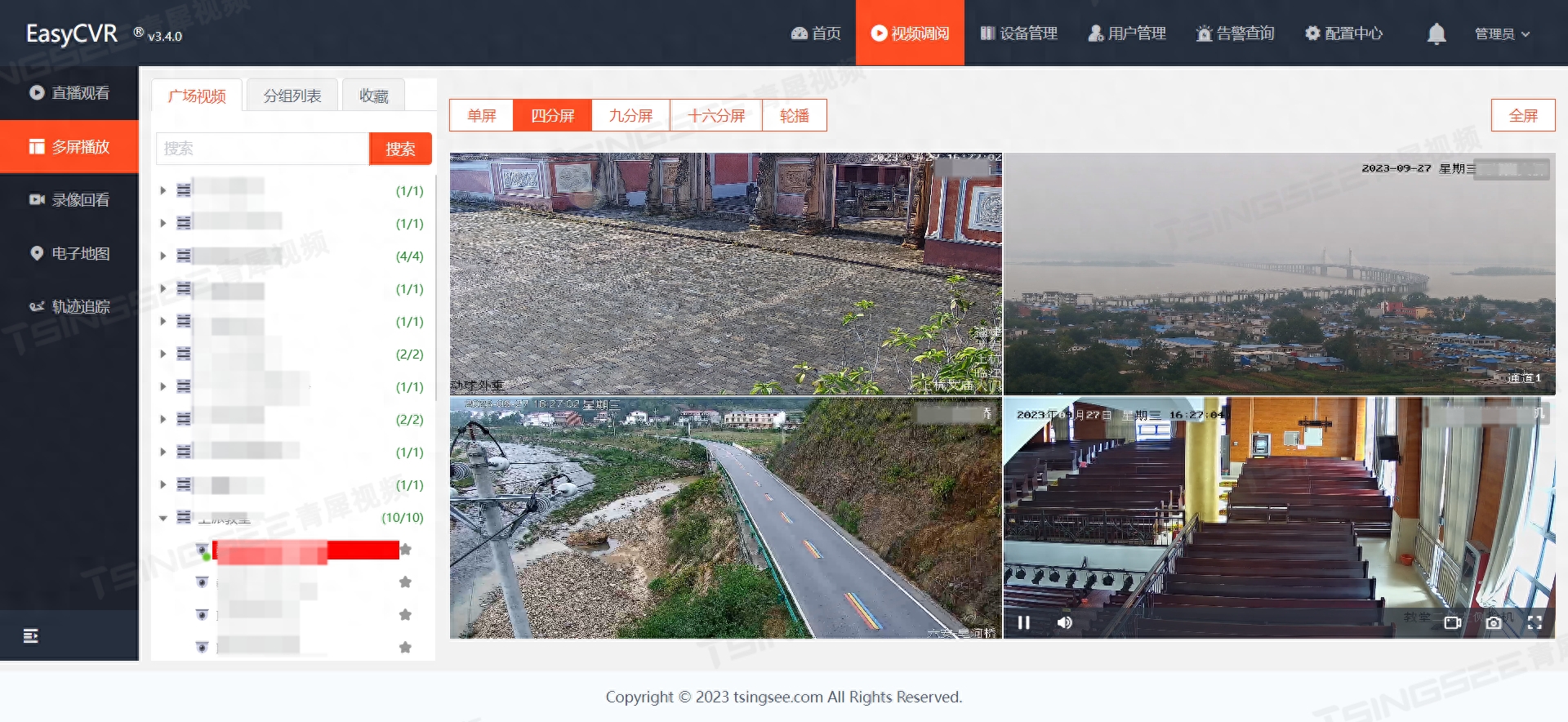
AI智能视频监控技术如何助力美好乡村建设?
随着城市化发展,很多乡村设施也在逐渐完善,智能监控也成了乡村发展必不可少的一环,智能视频监控应该在乡村建设里如何发挥作用呢? 1、有效提升安全意识 通过在乡村重要区域、公共场所、道路等设置智能视频监控设备,可…...

【网络安全】2023年堡垒机品牌大全
随着大家网络安全意识的增加,随着国家等保政策的严格执行,越来越多的企业开始采购堡垒机。这里就给大家总结了部分堡垒机品牌,让大家参考参考。 2023年堡垒机品牌大全 1、行云堡垒 2、JumpServer 3、安恒 4、骞云 5、齐治 6、阿里云 …...
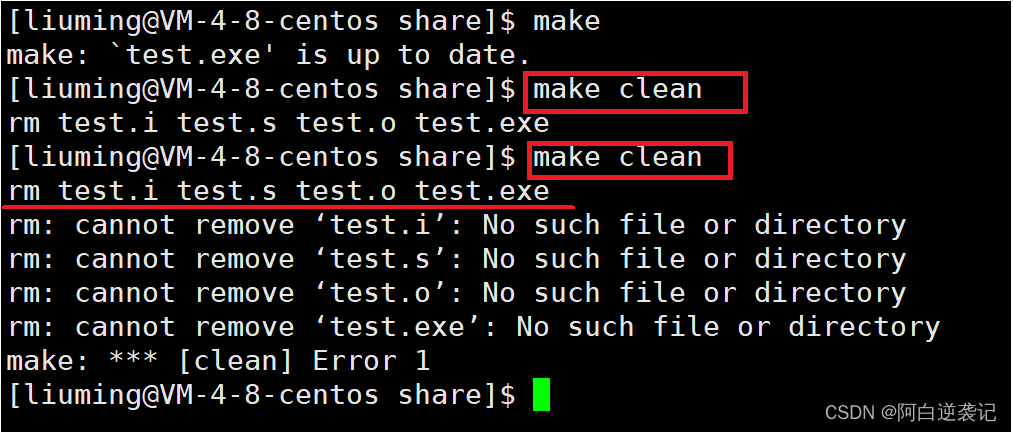
makefile相关知识的讲解
目录 makefile文件的介绍 step1:手动创建一个makefile文件 step2:在文件当中编辑指定的命令 step3:退出makefile文件并使用make执行文件当中的命令 step4:使用clean指令清除生成的文件 makefile当中的命令编写方式 目标文件和依…...
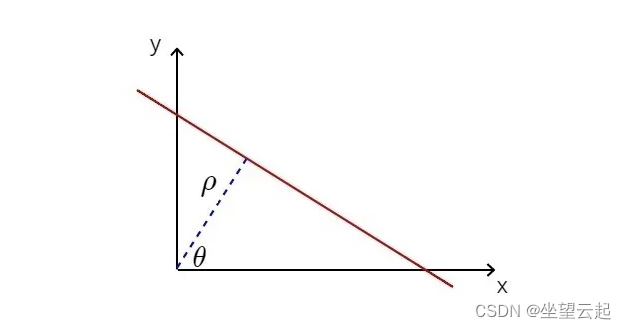
OpenCV中的HoughLines函数和HoughLinesP函数到底有什么区别?
一、简述 基于OpenCV进行直线检测可以使用HoughLines和HoughLinesP函数完成的。这两个函数之间的唯一区别在于,第一个函数使用标准霍夫变换,第二个函数使用概率霍夫变换(因此名称为 P)。概率版本之所以如此,是因为它仅分析点的子集并估计这些点都属于同一条线的概率。此实…...
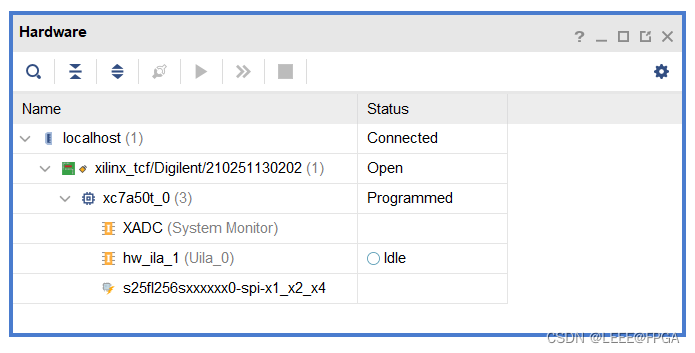
Xilinx FPGA 程序固化重新上电程序不运行的问题
问题描述 FPGA直接下载bit文件,功能正常。 FPGA擦除FLASH,烧写FLASH,正常。 电源断电,重新上电,FALSH里面的程序没有启动,FPGA程序没有跑起来。–FLASH启动不正常。 解决办法 在XDC约束文件里边增加约束: ## Configuration options, can be used for all designs se…...
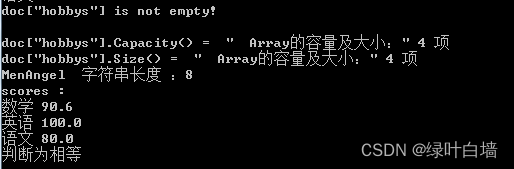
c++ 使用rapidjson对数据序列化和反序列化(vs2109)
RapidJSON是腾讯开源的一个高效的C JSON解析器及生成器,它是只有头文件的C库,综合性能是最好的。 1. 安装 在NuGet中为项目安装tencent.rapidjson 2. 引用头文件 #include <rapidjson/document.h> #include <rapidjson/memorystream.h> #…...

4.迭代最近点ICP及非线性优化求解
使用非线性优化方法求解ICP 文章目录 使用非线性优化方法求解ICP前情提要ICP问题回顾对矩阵变量求导数 ICP问题的非线性解法代码示例 欢迎访问个人网络日志🌹🌹知行空间🌹🌹 前情提要 在迭代最近点算法ICP及SVD求解中介绍了ICP问…...
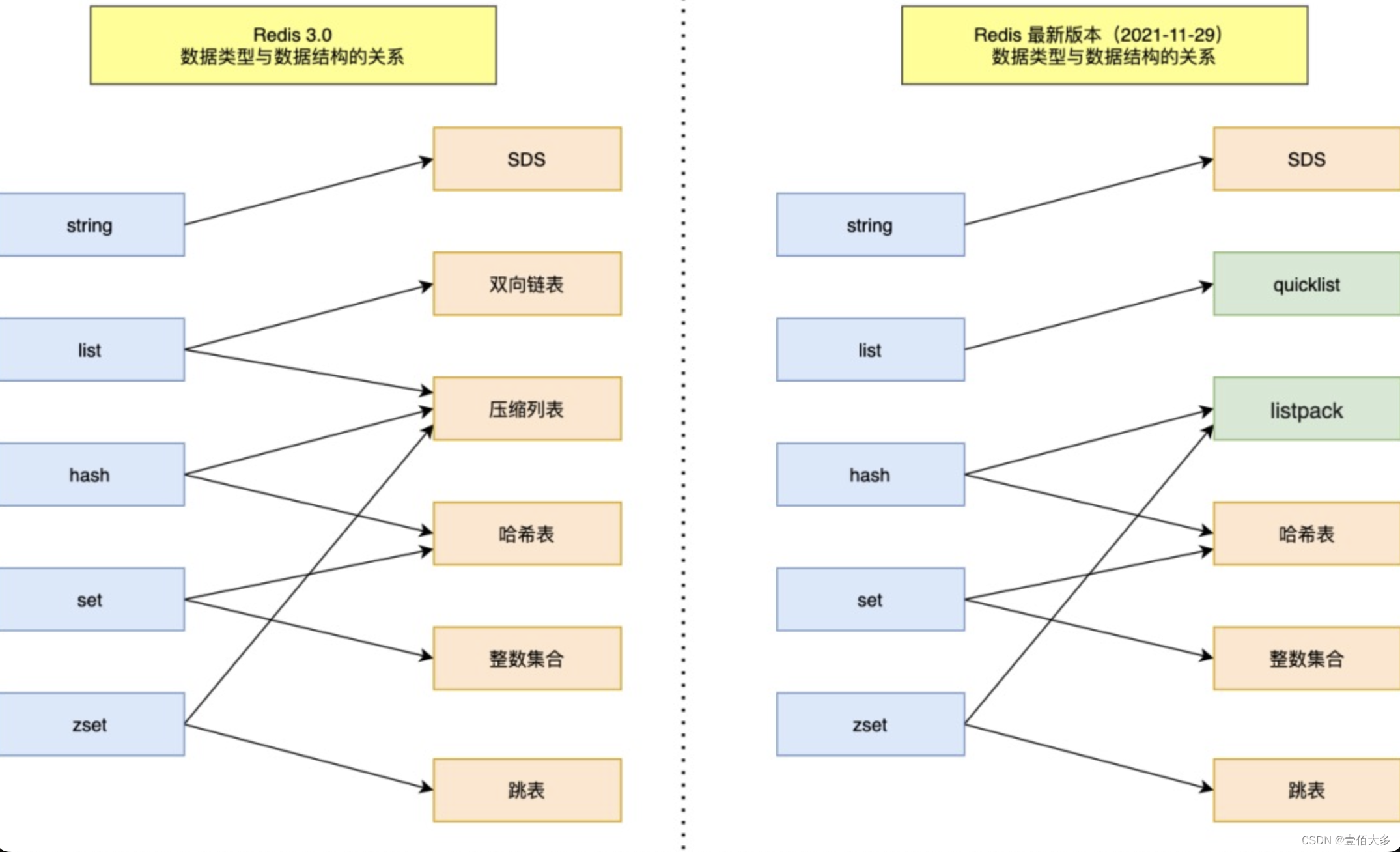
【redis总结】
文章目录 1、redis简介2、为什么要选择redis做缓存3、数据结构4、redis多线程模型redis6.0的变化 5、redis持久化AOF的实现过程RDB的实现过程 6、redis集群的搭建7、 redis过期删除和淘汰策略8、redis的内存淘汰策略 1、redis简介 Redis(Remote Dictionary Server&…...

图数据库:释放关系的力量
【squids.cn】 全网zui低价RDS,免费的迁移工具DBMotion、数据库备份工具DBTwin、SQL开发工具等 在数据管理领域,图数据库已经成为一种强大的工具,它彻底改变了我们处理和分析复杂关系的方式。与依赖表和列的传统关系数据库不同,图…...

铭豹扩展坞 USB转网口 突然无法识别解决方法
当 USB 转网口扩展坞在一台笔记本上无法识别,但在其他电脑上正常工作时,问题通常出在笔记本自身或其与扩展坞的兼容性上。以下是系统化的定位思路和排查步骤,帮助你快速找到故障原因: 背景: 一个M-pard(铭豹)扩展坞的网卡突然无法识别了,扩展出来的三个USB接口正常。…...
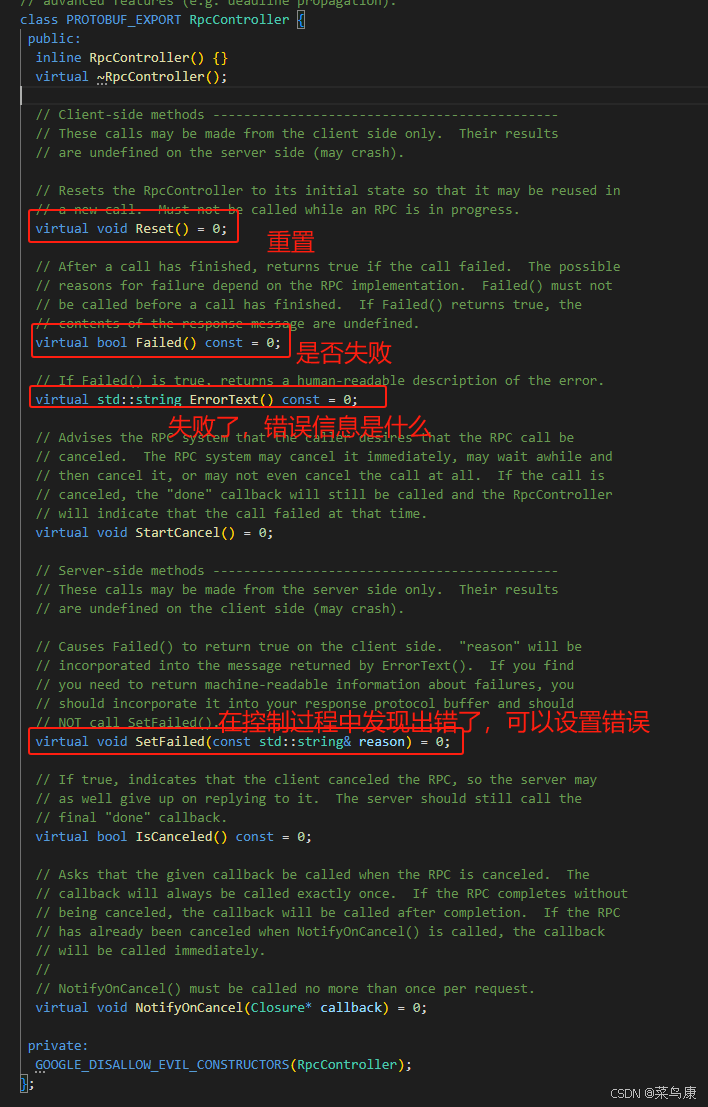
C++实现分布式网络通信框架RPC(3)--rpc调用端
目录 一、前言 二、UserServiceRpc_Stub 三、 CallMethod方法的重写 头文件 实现 四、rpc调用端的调用 实现 五、 google::protobuf::RpcController *controller 头文件 实现 六、总结 一、前言 在前边的文章中,我们已经大致实现了rpc服务端的各项功能代…...

边缘计算医疗风险自查APP开发方案
核心目标:在便携设备(智能手表/家用检测仪)部署轻量化疾病预测模型,实现低延迟、隐私安全的实时健康风险评估。 一、技术架构设计 #mermaid-svg-iuNaeeLK2YoFKfao {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid-svg…...

质量体系的重要
质量体系是为确保产品、服务或过程质量满足规定要求,由相互关联的要素构成的有机整体。其核心内容可归纳为以下五个方面: 🏛️ 一、组织架构与职责 质量体系明确组织内各部门、岗位的职责与权限,形成层级清晰的管理网络…...

三体问题详解
从物理学角度,三体问题之所以不稳定,是因为三个天体在万有引力作用下相互作用,形成一个非线性耦合系统。我们可以从牛顿经典力学出发,列出具体的运动方程,并说明为何这个系统本质上是混沌的,无法得到一般解…...
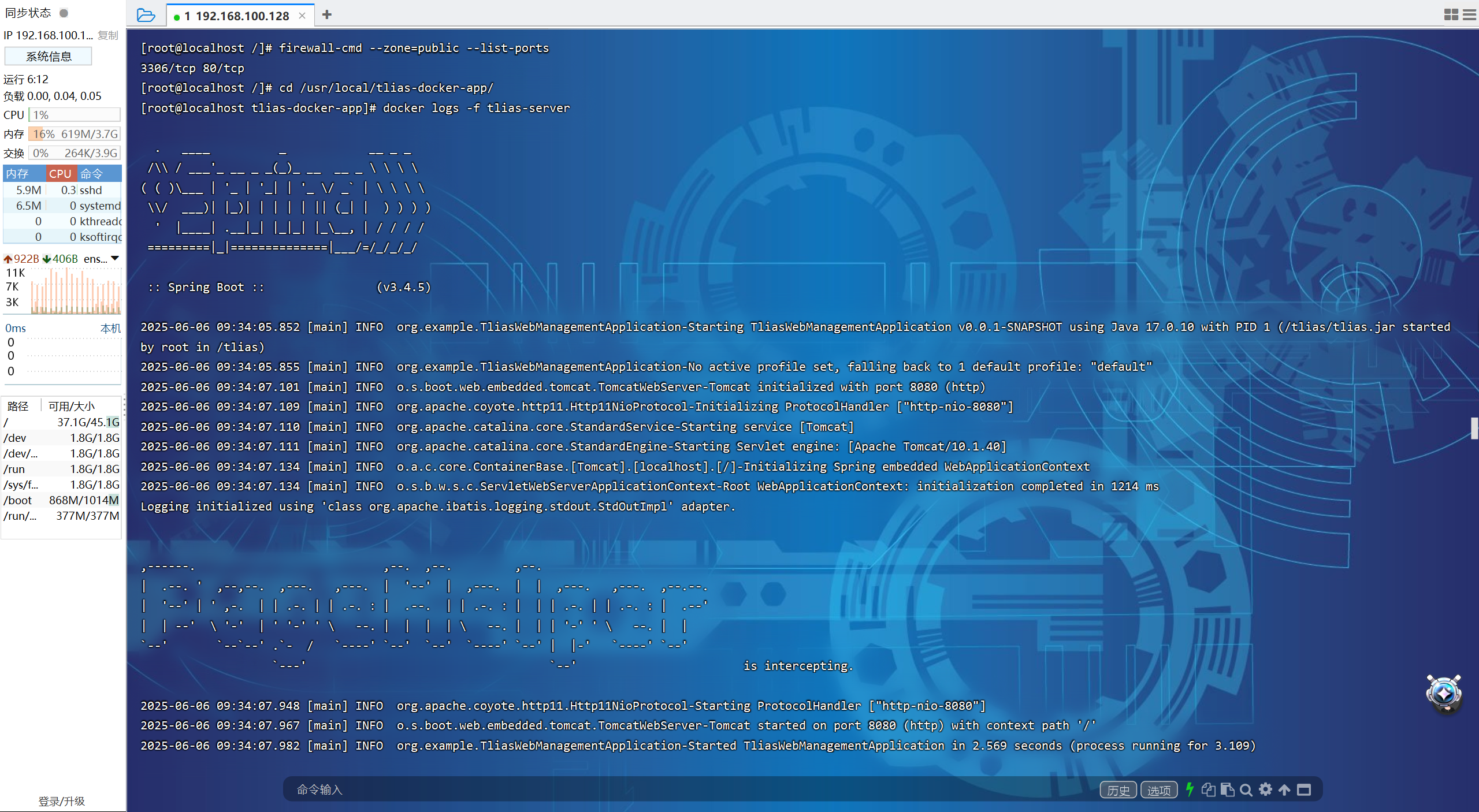
【JavaWeb】Docker项目部署
引言 之前学习了Linux操作系统的常见命令,在Linux上安装软件,以及如何在Linux上部署一个单体项目,大多数同学都会有相同的感受,那就是麻烦。 核心体现在三点: 命令太多了,记不住 软件安装包名字复杂&…...
安装docker)
Linux离线(zip方式)安装docker
目录 基础信息操作系统信息docker信息 安装实例安装步骤示例 遇到的问题问题1:修改默认工作路径启动失败问题2 找不到对应组 基础信息 操作系统信息 OS版本:CentOS 7 64位 内核版本:3.10.0 相关命令: uname -rcat /etc/os-rele…...
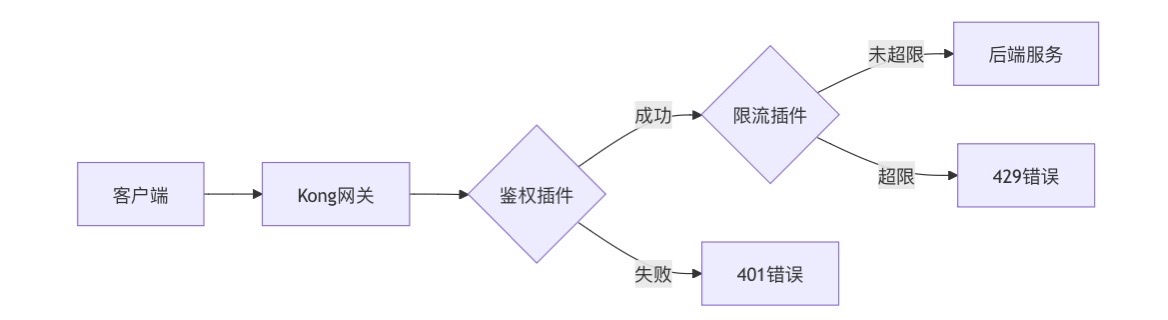
云原生安全实战:API网关Kong的鉴权与限流详解
🔥「炎码工坊」技术弹药已装填! 点击关注 → 解锁工业级干货【工具实测|项目避坑|源码燃烧指南】 一、基础概念 1. API网关(API Gateway) API网关是微服务架构中的核心组件,负责统一管理所有API的流量入口。它像一座…...
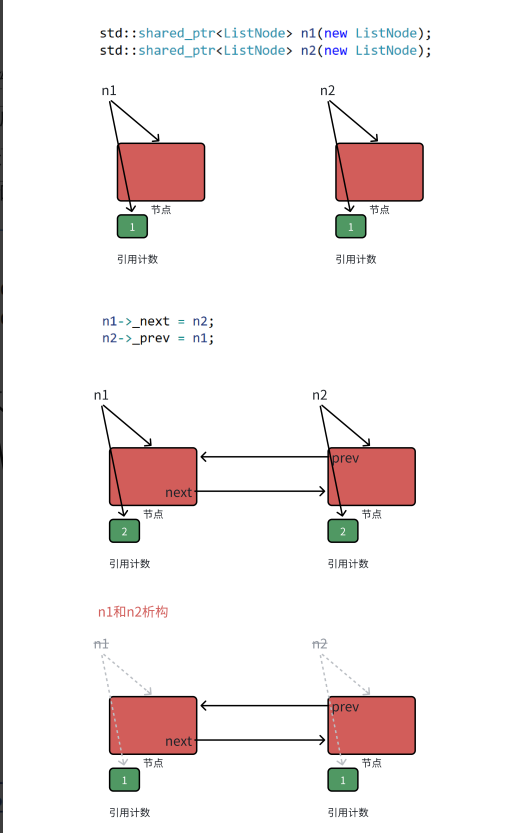
【C++进阶篇】智能指针
C内存管理终极指南:智能指针从入门到源码剖析 一. 智能指针1.1 auto_ptr1.2 unique_ptr1.3 shared_ptr1.4 make_shared 二. 原理三. shared_ptr循环引用问题三. 线程安全问题四. 内存泄漏4.1 什么是内存泄漏4.2 危害4.3 避免内存泄漏 五. 最后 一. 智能指针 智能指…...
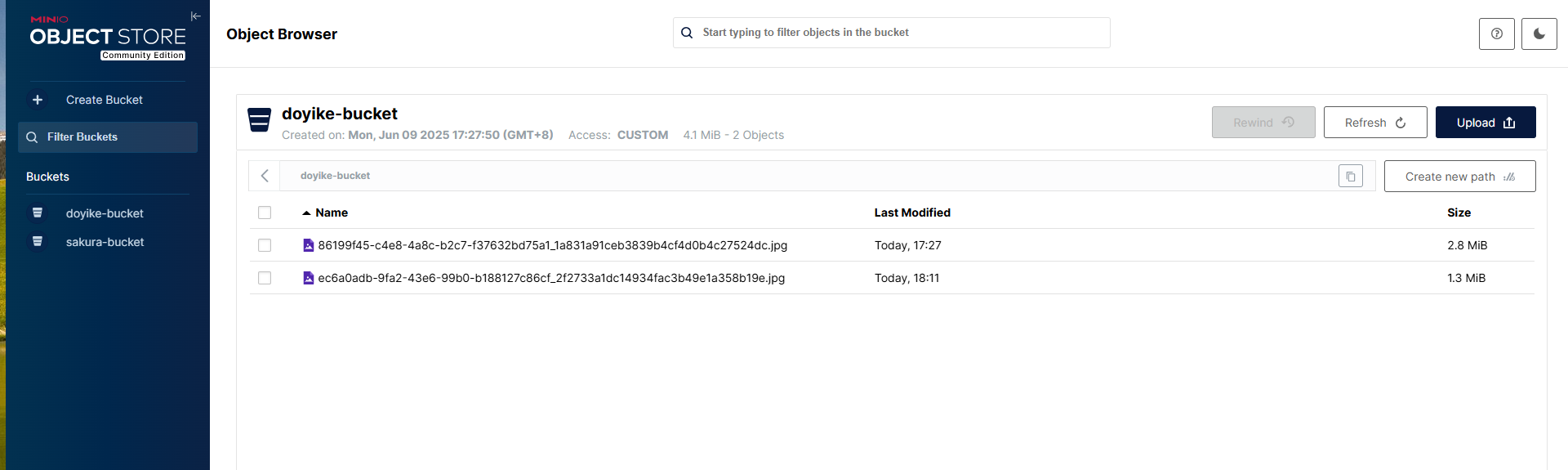
Linux部署私有文件管理系统MinIO
最近需要用到一个文件管理服务,但是又不想花钱,所以就想着自己搭建一个,刚好我们用的一个开源框架已经集成了MinIO,所以就选了这个 我这边对文件服务性能要求不是太高,单机版就可以 安装非常简单,几个命令就…...