Linux中断处理
目录
一、什么是中断
二、中断处理原理
三、中断接口
3.1 中断申请
3.2 中断释放
3.3 中断处理函数原型
四、按键驱动
一、什么是中断
一种硬件上的通知机制,用来通知CPU发生了某种需要立即处理的事件
分为:
1. 内部中断 CPU执行程序的过程中,发生的一些硬件出错、运算出错事件(如分母为0、溢出等等),不可屏蔽
2. 外部中断 外设发生某种情况,通过一个引脚的高、低电平变化来通知CPU (如外设产生了数据、某种处理完毕等等)
二、中断处理原理
(向量中断:在一块内存中每个地址对应一个中断.arm中异常是向量形式的。中断是非向量形式的中断是7种异常的一种
非向量中断:只有一个中断接口,在中断处理程序中有很多分处理函数,比如exynos4412)
(哪种中断好像和硬件有关)
任何一种中断产生,CPU都会暂停当前执行的程序,跳转到内存固定位置执行一段程序,该程序被称为总的中断服务程序,在该程序中区分中断源,然后进一步调用该中断源对应的处理函数。
中断源对应的处理函数被称为分中断处理程序,一般每一个分中断处理程序对应一个外设产生的中断
写驱动时,如果外设有中断,则需要编写一个函数(分中断处理程序)来处理这种中断
三、中断接口
3.1 中断申请
```cint request_irq(unsigned int irq, irq_handler_t handler, unsigned long flags,const char *name, void *dev)/*参数:irq:所申请的中断号handler:该中断号对应的中断处理函数flags:中断触发方式或处理方式触发方式:IRQF_TRIGGER_NONE //无触发IRQF_TRIGGER_RISING //上升沿触发IRQF_TRIGGER_FALLING //下降沿触发IRQF_TRIGGER_HIGH //高电平触发IRQF_TRIGGER_LOW //低电平触发处理方式:IRQF_DISABLED //用于快速中断,处理中屏蔽所有中断IRQF_SHARED //共享中断name:中断名 /proc/interruptsdev:传递给中断例程的参数,共享中断时用于区分那个设备,一般为对应设备的结构体地址,无共享中断时写NULL返回值:成功:0 失败:错误码*/```
3.2 中断释放
```cvoid free_irq(unsigned int irq, void *dev_id);/*功能:释放中断号参数:irq:设备号dev_id:共享中断时用于区分那个设备一般强转成设备号,无共享中断时写NULL*/```
3.3 中断处理函数原型
```ctypedef irqreturn_t (*irq_handler_t)(int, void *);/*参数:int:中断号void*:对应的申请中断时的dev_id返回值:typedef enum irqreturn irqreturn_t; //中断返回值类型enum irqreturn {IRQ_NONE = (0 << 0),IRQ_HANDLED = (1 << 0),IRQ_WAKE_THREAD = (1 << 1),};返回IRQ_HANDLED表示处理完了,返回IRQ_NONE在共享中断表示不处理*/```
四、按键驱动
按键原理图:
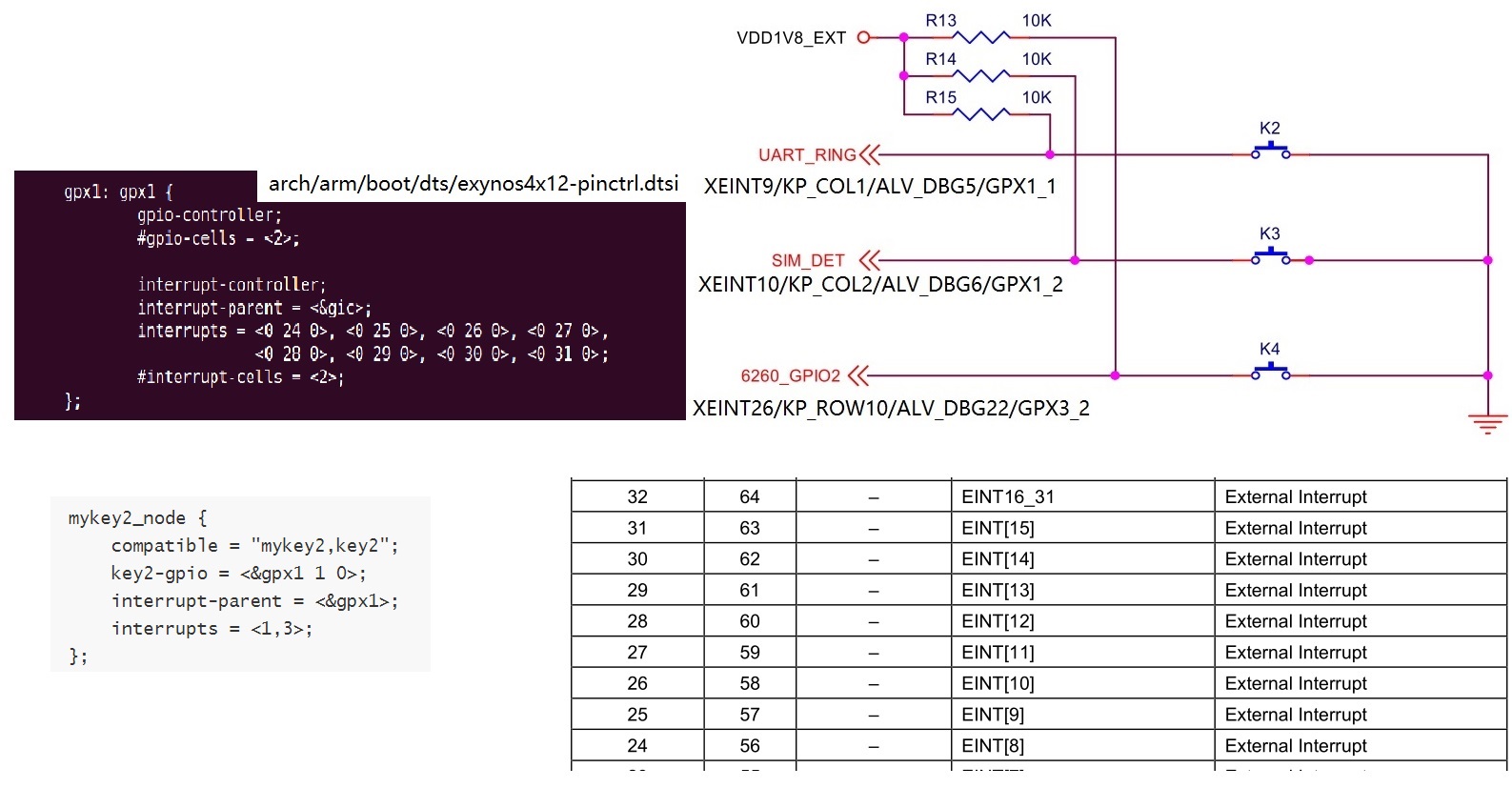
interrupts中第一个数据是 上面紫色框一致的25是第1个24是第0个所以是1,3是11所以上升沿也触发下降沿也触发。
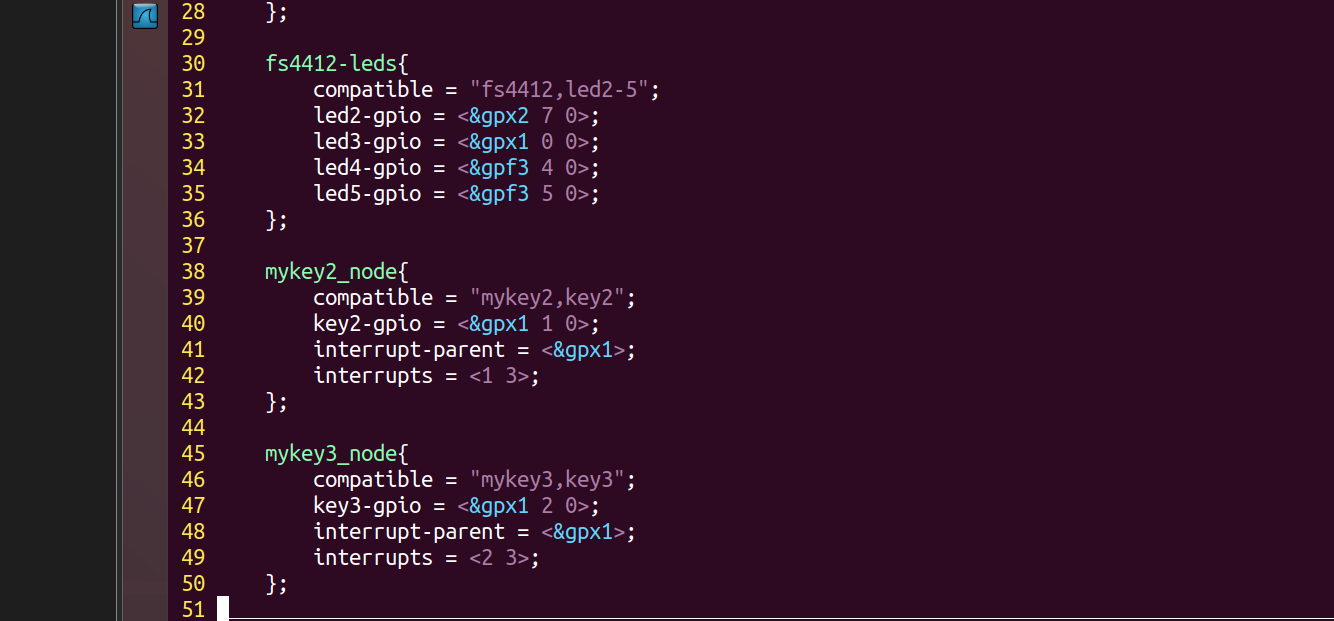
exynos4412-fs4412.dts中增加节点
```
mykey2_node {
compatible = "mykey2,key2";
key2-gpio = <&gpx1 1 0>;
interrupt-parent = <&gpx1>;
interrupts = <1 3>;
};
```
申请中断做好要在初始化函数左后做,不然可以会导致有些东西没准备好
由于是按键所以要设置防抖,异常上下文是不能msleep的这里延时使用mdelay
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/fs.h>
#include <linux/gpio.h>
#include <linux/interrupt.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/cdev.h>
#include <linux/wait.h>
#include <linux/sched.h>
#include <linux/poll.h>
#include <linux/mm.h>
#include <linux/delay.h>
#include <linux/slab.h>
#include <asm/uaccess.h>#include "fs4412_key.h"int major = 11;
int minor = 0;
int fs4412key2_num = 1;struct fs4412key2_dev
{struct cdev mydev;int gpio;int irqno;struct keyvalue data;int newflag;spinlock_t lock;wait_queue_head_t rq;
};struct fs4412key2_dev *pgmydev = NULL;int fs4412key2_open(struct inode *pnode,struct file *pfile)
{pfile->private_data =(void *) (container_of(pnode->i_cdev,struct fs4412key2_dev,mydev));return 0;
}int fs4412key2_close(struct inode *pnode,struct file *pfile)
{return 0;
}ssize_t fs4412key2_read(struct file *pfile,char __user *puser,size_t count,loff_t *p_pos)
{struct fs4412key2_dev *pmydev = (struct fs4412key2_dev *)pfile->private_data;int size = 0;int ret = 0;if(count < sizeof(struct keyvalue)){printk("expect read size is invalid\n");return -1;}spin_lock(&pmydev->lock);if(!pmydev->newflag){if(pfile->f_flags & O_NONBLOCK){//非阻塞spin_unlock(&pmydev->lock);printk("O_NONBLOCK No Data Read\n");return -1;}else{//阻塞spin_unlock(&pmydev->lock);ret = wait_event_interruptible(pmydev->rq,pmydev->newflag == 1);if(ret){printk("Wake up by signal\n");return -ERESTARTSYS;}spin_lock(&pmydev->lock);}}if(count > sizeof(struct keyvalue)){size = sizeof(struct keyvalue);}else{size = count;}ret = copy_to_user(puser,&pmydev->data,size);if(ret){spin_unlock(&pmydev->lock);printk("copy_to_user failed\n");return -1;}pmydev->newflag = 0;spin_unlock(&pmydev->lock);return size;
}unsigned int fs4412key2_poll(struct file *pfile,poll_table *ptb)
{struct fs4412key2_dev *pmydev = (struct fs4412key2_dev *)pfile->private_data;unsigned int mask = 0;poll_wait(pfile,&pmydev->rq,ptb);spin_lock(&pmydev->lock);if(pmydev->newflag){mask |= POLLIN | POLLRDNORM;}spin_unlock(&pmydev->lock);return mask;
}struct file_operations myops = {.owner = THIS_MODULE,.open = fs4412key2_open,.release = fs4412key2_close,.read = fs4412key2_read,.poll = fs4412key2_poll,
};irqreturn_t key2_irq_handle(int no,void *arg)
{struct fs4412key2_dev *pmydev = (struct fs4412key2_dev *)arg;int status1 = 0;int status2 = 0;int status = 0;status1 = gpio_get_value(pmydev->gpio);mdelay(1);status2 = gpio_get_value(pmydev->gpio);if(status1 != status2){return IRQ_NONE;}status = status1;spin_lock(&pmydev->lock);if(status == pmydev->data.status){spin_unlock(&pmydev->lock);return IRQ_NONE;}pmydev->data.code = KEY2;pmydev->data.status = status;pmydev->newflag = 1;spin_unlock(&pmydev->lock);wake_up(&pmydev->rq);return IRQ_HANDLED;
}int __init fs4412key2_init(void)
{int ret = 0;dev_t devno = MKDEV(major,minor);struct device_node *pnode = NULL;pnode = of_find_node_by_path("/mykey2_node");if(NULL == pnode){printk("find node failed\n");return -1;}pgmydev = (struct fs4412key2_dev *)kmalloc(sizeof(struct fs4412key2_dev),GFP_KERNEL);if(NULL == pgmydev){printk("kmallc for struct fs4412key2_dev failed\n");return -1;}pgmydev->gpio = of_get_named_gpio(pnode,"key2-gpio",0);pgmydev->irqno = irq_of_parse_and_map(pnode,0);ret = register_chrdev_region(devno,fs4412key2_num,"fs4412key2");if(ret){ret = alloc_chrdev_region(&devno,minor,fs4412key2_num,"fs4412key2");if(ret){kfree(pgmydev);pgmydev = NULL;printk("get devno failed\n");return -1;}major = MAJOR(devno);}cdev_init(&pgmydev->mydev,&myops);pgmydev->mydev.owner = THIS_MODULE;cdev_add(&pgmydev->mydev,devno,fs4412key2_num);init_waitqueue_head(&pgmydev->rq);spin_lock_init(&pgmydev->lock);ret = request_irq(pgmydev->irqno,key2_irq_handle,IRQF_TRIGGER_FALLING | IRQF_TRIGGER_RISING,"fs4412key2",pgmydev);if(ret){printk("request_irq failed\n");cdev_del(&pgmydev->mydev);kfree(pgmydev);pgmydev = NULL;unregister_chrdev_region(devno,fs4412key2_num);return -1;}return 0;
}void __exit fs4412key2_exit(void)
{dev_t devno = MKDEV(major,minor);free_irq(pgmydev->irqno,pgmydev);cdev_del(&pgmydev->mydev);unregister_chrdev_region(devno,fs4412key2_num);kfree(pgmydev);pgmydev = NULL;
}MODULE_LICENSE("GPL");module_init(fs4412key2_init);
module_exit(fs4412key2_exit);
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <unistd.h>#include <stdio.h>#include "fs4412_key.h"int main(int argc,char *argv[])
{int fd = -1;struct keyvalue keydata = {0};int ret = 0;if(argc < 2){printf("The argument is too few\n");return 1;}fd = open(argv[1],O_RDONLY);if(fd < 0){printf("open %s failed\n",argv[1]);return 3;}while((ret = read(fd,&keydata,sizeof(keydata))) == sizeof(keydata)){if(keydata.status == KEY_DOWN){printf("Key2 is down!\n");}else{printf("Key2 is up!\n");}}close(fd);fd = -1;return 0;
}
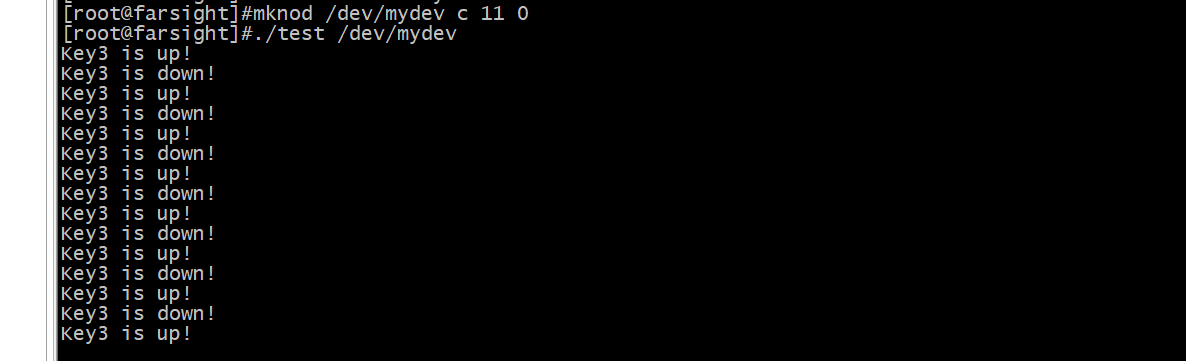
根据key2的驱动改写key3
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/fs.h>
#include <linux/gpio.h>
#include <linux/interrupt.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/cdev.h>
#include <linux/wait.h>
#include <linux/sched.h>
#include <linux/poll.h>
#include <linux/mm.h>
#include <linux/delay.h>
#include <linux/slab.h>
#include <asm/uaccess.h>#include "fs4412_key.h"int major = 11;
int minor = 0;
int fs4412key3_num = 1;struct fs4412key3_dev
{struct cdev mydev;int gpio;int irqno;struct keyvalue data;int newflag;spinlock_t lock;wait_queue_head_t rq;
};struct fs4412key3_dev *pgmydev = NULL;int fs4412key3_open(struct inode *pnode,struct file *pfile)
{pfile->private_data =(void *) (container_of(pnode->i_cdev,struct fs4412key3_dev,mydev));return 0;
}int fs4412key3_close(struct inode *pnode,struct file *pfile)
{return 0;
}ssize_t fs4412key3_read(struct file *pfile,char __user *puser,size_t count,loff_t *p_pos)
{struct fs4412key3_dev *pmydev = (struct fs4412key3_dev *)pfile->private_data;int size = 0;int ret = 0;if(count < sizeof(struct keyvalue)){printk("expect read size is invalid\n");return -1;}spin_lock(&pmydev->lock);if(!pmydev->newflag){if(pfile->f_flags & O_NONBLOCK){//非阻塞spin_unlock(&pmydev->lock);printk("O_NONBLOCK No Data Read\n");return -1;}else{//阻塞spin_unlock(&pmydev->lock);ret = wait_event_interruptible(pmydev->rq,pmydev->newflag == 1);if(ret){printk("Wake up by signal\n");return -ERESTARTSYS;}spin_lock(&pmydev->lock);}}if(count > sizeof(struct keyvalue)){size = sizeof(struct keyvalue);}else{size = count;}ret = copy_to_user(puser,&pmydev->data,size);if(ret){spin_unlock(&pmydev->lock);printk("copy_to_user failed\n");return -1;}pmydev->newflag = 0;spin_unlock(&pmydev->lock);return size;
}unsigned int fs4412key3_poll(struct file *pfile,poll_table *ptb)
{struct fs4412key3_dev *pmydev = (struct fs4412key3_dev *)pfile->private_data;unsigned int mask = 0;poll_wait(pfile,&pmydev->rq,ptb);spin_lock(&pmydev->lock);if(pmydev->newflag){mask |= POLLIN | POLLRDNORM;}spin_unlock(&pmydev->lock);return mask;
}struct file_operations myops = {.owner = THIS_MODULE,.open = fs4412key3_open,.release = fs4412key3_close,.read = fs4412key3_read,.poll = fs4412key3_poll,
};irqreturn_t key3_irq_handle(int no,void *arg)
{struct fs4412key3_dev *pmydev = (struct fs4412key3_dev *)arg;int status1 = 0;int status2 = 0;int status = 0;status1 = gpio_get_value(pmydev->gpio);mdelay(1);status2 = gpio_get_value(pmydev->gpio);if(status1 != status2){return IRQ_NONE;}status = status1;spin_lock(&pmydev->lock);if(status == pmydev->data.status){spin_unlock(&pmydev->lock);return IRQ_NONE;}pmydev->data.code = KEY3;pmydev->data.status = status;pmydev->newflag = 1;spin_unlock(&pmydev->lock);wake_up(&pmydev->rq);return IRQ_HANDLED;
}int __init fs4412key3_init(void)
{int ret = 0;dev_t devno = MKDEV(major,minor);struct device_node *pnode = NULL;pnode = of_find_node_by_path("/mykey3_node");if(NULL == pnode){printk("find node failed\n");return -1;}pgmydev = (struct fs4412key3_dev *)kmalloc(sizeof(struct fs4412key3_dev),GFP_KERNEL);if(NULL == pgmydev){printk("kmallc for struct fs4412key3_dev failed\n");return -1;}pgmydev->gpio = of_get_named_gpio(pnode,"key3-gpio",0);pgmydev->irqno = irq_of_parse_and_map(pnode,0);ret = register_chrdev_region(devno,fs4412key3_num,"fs4412key3");if(ret){ret = alloc_chrdev_region(&devno,minor,fs4412key3_num,"fs4412key3");if(ret){kfree(pgmydev);pgmydev = NULL;printk("get devno failed\n");return -1;}major = MAJOR(devno);}cdev_init(&pgmydev->mydev,&myops);pgmydev->mydev.owner = THIS_MODULE;cdev_add(&pgmydev->mydev,devno,fs4412key3_num);init_waitqueue_head(&pgmydev->rq);spin_lock_init(&pgmydev->lock);ret = request_irq(pgmydev->irqno,key3_irq_handle,IRQF_TRIGGER_FALLING | IRQF_TRIGGER_RISING,"fs4412key3",pgmydev);if(ret){printk("request_irq failed\n");cdev_del(&pgmydev->mydev);kfree(pgmydev);pgmydev = NULL;unregister_chrdev_region(devno,fs4412key3_num);return -1;}return 0;
}void __exit fs4412key3_exit(void)
{dev_t devno = MKDEV(major,minor);free_irq(pgmydev->irqno,pgmydev);cdev_del(&pgmydev->mydev);unregister_chrdev_region(devno,fs4412key3_num);kfree(pgmydev);pgmydev = NULL;
}MODULE_LICENSE("GPL");module_init(fs4412key3_init);
module_exit(fs4412key3_exit);
#ifndef FS4412_KEY_H
#define FS4412_KEY_Henum KEYCODE
{KEY2 = 1002,KEY3 = 1003,KEY4,
};enum KEY_STATUS
{KEY_DOWN = 0,KEY_UP,
};struct keyvalue
{int code;//which KEYint status;
};#endif
测试代码修改一下打印就行。
相关文章:
Linux中断处理
目录 一、什么是中断 二、中断处理原理 三、中断接口 3.1 中断申请 3.2 中断释放 3.3 中断处理函数原型 四、按键驱动 一、什么是中断 一种硬件上的通知机制,用来通知CPU发生了某种需要立即处理的事件 分为: 1. 内部中断 CPU执行程序的过程中&am…...

python中安装gurobi和pycharm没有语法提示问题解决
安装gurobi第一步 :下载gurobi ( http://www.gurobi.com ) ,需要注册账号第二步、申请License注册如果可以通过校园网, 则直接生成。不能的话,通过网站,发邮件申请 http://www.gurobi.cn/NewsView1.Asp?id4第三、邮件…...
滤波算法:经典卡尔曼滤波
卡尔曼滤波实质上就是基于观测值以及估计值二者的数据对真实值进行估计的过程。预测步骤如图1所示: 图1 卡尔曼滤波原理流程图 假设我们能够得到被测物体的位置和速度的测量值 ,在已知上一时刻的最优估计值 以及它的协方差矩阵 的条件下ÿ…...

flask框架(下)
文章目录flask框架(下)werkzeug简介请求上下文flask 处理方案回到 wsgi_app 方法中push 源码总结补充flask框架(下) werkzeug简介 Werkzeug是一个WSGI工具包,他可以作为一个Web框架的底层库。这里稍微说一下, werkzeug 不是一个web服务器,也…...
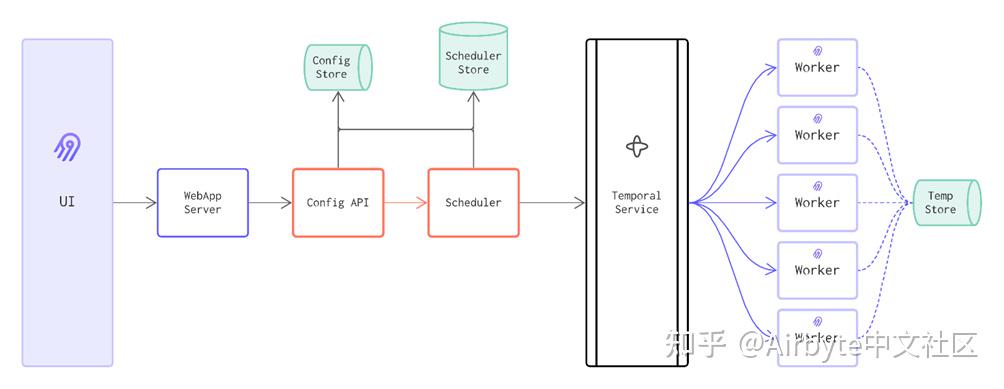
Airbyte架构
作为一款技术复杂的数据集成管道,Airbyte的架构模式非常清晰明了。Airbyte应用模式Airbyte管道架构UI:一个易于使用的图形界面,用于与Airbyte API进行交互。WebApp Server:处理 UI 和 API 之间的连接。Config Store:存…...
anchor box只是先验知识,bounding box是一种过程,ground truth才是标准答案,
anchor boxes是一组提前预定义的边框,这些框的宽高和数据集中目标物体的宽高大体是一致的,换句话说,数据集中的绝大多数物体都能找到与其大小一致的anchor box。 举例来说,如果数据集中包含苹果、猫,那么这组anchor bo…...
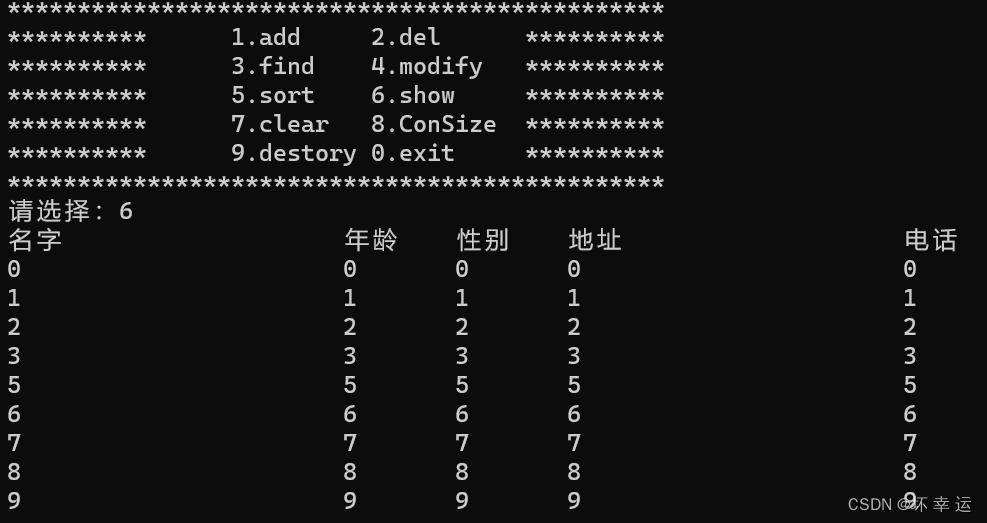
带你轻松实现通讯录(C语言版)
文章目录前言通讯录初始化通讯录运行的基本框架和菜单增添联系人删除联系人查找联系人修改联系人信息展示通讯录通讯录联系人个数排序通讯录文件操作储存通讯录信息销毁通讯录整体代码Contacts.hContacts.ctest.c写在最后前言 学习C语言的小伙伴,相信都要经历实现通…...
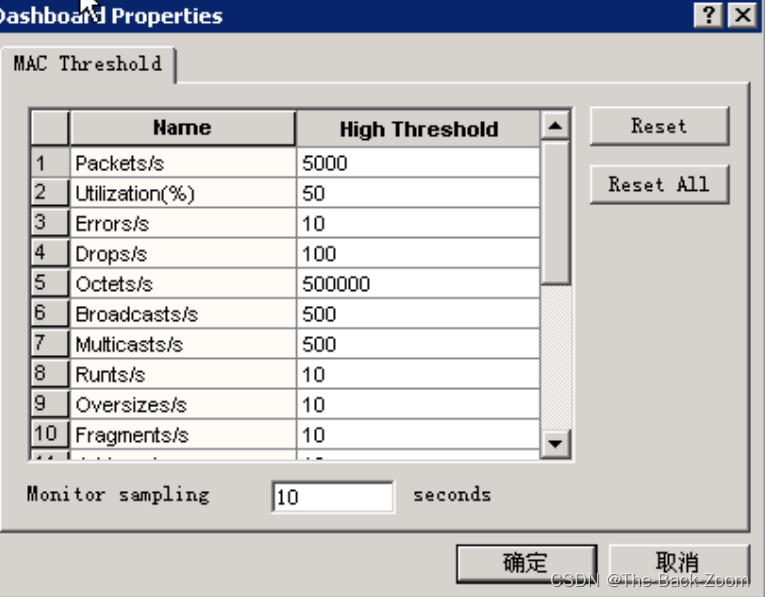
渗透测试之交换式网络嗅探实验
渗透测试之交换式网络嗅探实验实验目的一、实验原理1.1 网络嗅探器Sniffer的工作原理1.2 网络嗅探器的分类1.3 网络嗅探器Sniffer的作用二、实验环境2.1 操作机器2.2 实验工具Sniffer2.3 安装工具Sniffer三、实验步骤1. 熟悉Sniffer工具的启动2. 进行监听3. 熟悉Sniffer工具的介…...
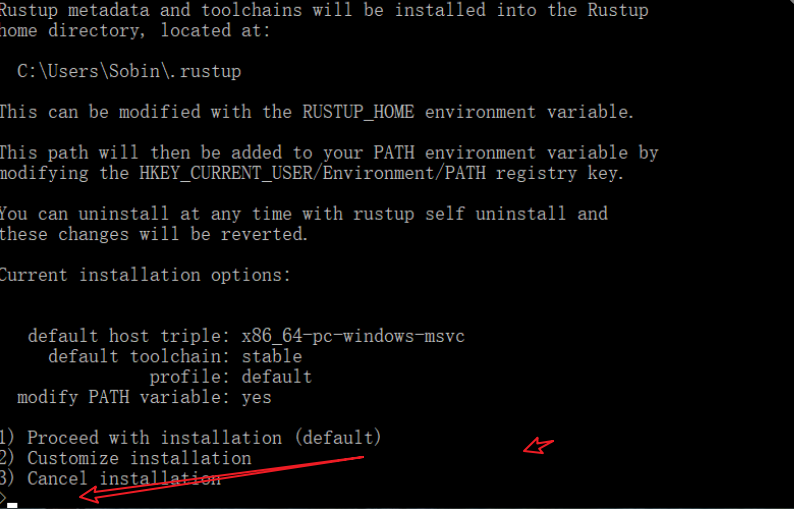
rust 安装
rust 安装一、需要一个c的环境二、配置环境变量三、开始安装一、需要一个c的环境 安装Visual Studio 二、配置环境变量 Rust需要安装两个东西,一个是rustup,一个是cargo。所以你需要设置两个环境变量来分别指定他们的安装目录。 通过RUSTUP_HOME指定…...
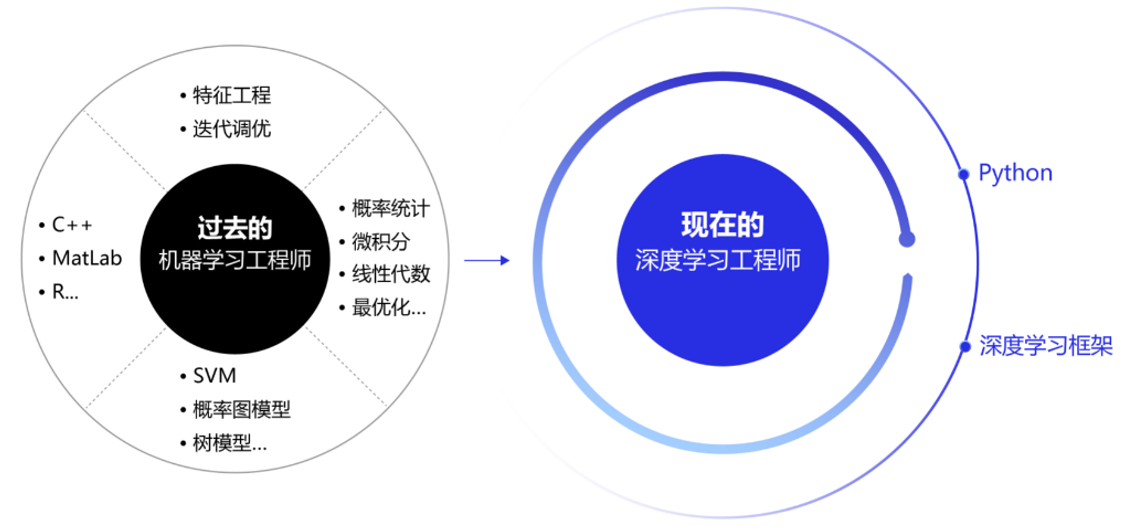
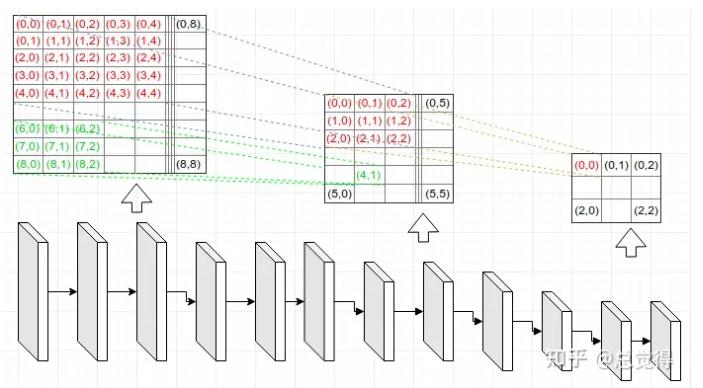
机器学习和深度学习综述
机器学习和深度学习综述 1. 人工智能、机器学习、深度学习的关系 近些年人工智能、机器学习和深度学习的概念十分火热,但很多从业者却很难说清它们之间的关系,外行人更是雾里看花。在研究深度学习之前,先从三个概念的正本清源开始。概括来说…...
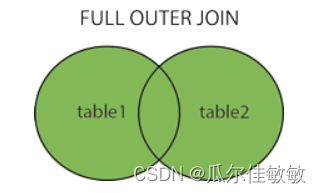
SQL零基础入门学习(八)
SQL零基础入门学习(七) SQL 连接(JOIN) SQL join 用于把来自两个或多个表的行结合起来。 下图展示了 LEFT JOIN、RIGHT JOIN、INNER JOIN、OUTER JOIN 相关的 7 种用法。 SQL JOIN SQL JOIN 子句用于把来自两个或多个表的行结合起来,基…...
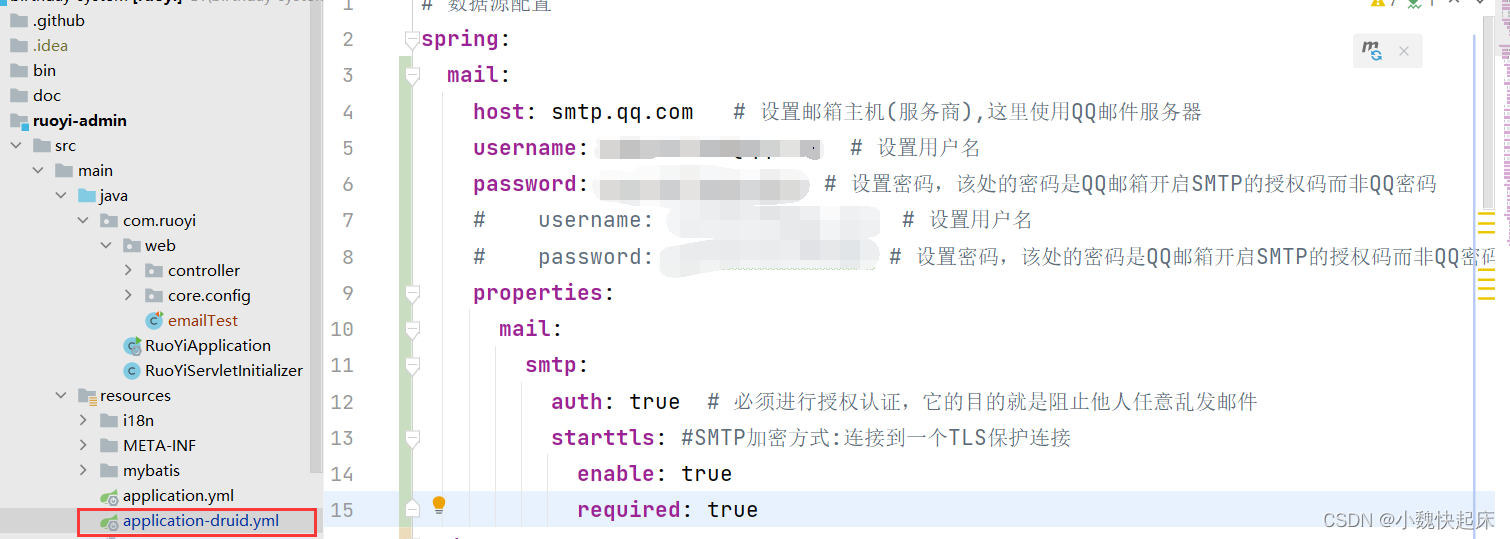
若依系统如何集成qq邮件发送【超详细,建议收藏】
若依系统的部署博主就不在这儿阐述了,默认大家的电脑已经部署好了若依系统,这里直接开始集成邮件系统,首先我们得需要对qq邮箱进行配置;一套学不会你来打我😀; 一、开启我们的qq邮箱发送邮件的配置 1、先进…...

前端-CSS-zxst
CSS 层叠样式表,为了定义HTML标签的样式 内联样式 在标签内部通过 style 属性设置样式值样式名:样式值;样式名:样式值; 内部样式 在 head 标签内通过 style 标签选择器设置样式,供这个网页上的元素使用 外部样式 在 head 标签内通过 link 标签引入外部…...
|LuatOS-SOC接口|官方demo|学习(19):fonts库)
合宙Air105|fonts库|mcu.ticks()|LuatOS-SOC接口|官方demo|学习(19):fonts库
基础资料 基于Air105开发板:Air105 - LuatOS 文档 上手:开发上手 - LuatOS 文档 探讨重点 官方fonts库函数介绍以及利用mcu.ticks()计算程序运行周期相关内容的学习及探讨。 软件版本 AIR105:LuatOSAIR105 base 22.12 bsp V0014 32bit …...

成都欢蓬电商:抖音直播卖药灰度测试通告
据报道,近日有MCN机构透露,目前抖音直播卖药为“测试项目,谨慎试跑中”; “仍处于灰度测试,至于测试多久,抖音官方确实没有答复,需要看第一阶段数据,然后定夺,预计4月份会纳入更多机…...

1.1计算机和编成语言
一、C 语言简介历史C 语言最初是作为 Unix 系统的开发工具而发明的。1969年,美国贝尔实验室的肯汤普森(Ken Thompson)与丹尼斯里奇(Dennis Ritchie)一起开发了Unix 操作系统。Unix 是用汇编语言写的,无法移…...

解析 xml 文件 - xml.etree ElementTree
目录1、导入模块 →\rightarrow→ 读取文件 →\rightarrow→ 获取根节点 →\rightarrow→ 获取根节点的标签与属性2、遍历一级子节点、获取子节点的标签 与 属性3、通过索引 获取数据4、Element.findall()、Element.find() - 按照 tag 值查找 子节点5、Element.iter() - 循环迭…...

LeetCode Cookbook 哈希表(collections.Counter()和collections.defaultdict())
好久不更了,这次一鼓作气,学完它! 文章目录LeetCode Cookbook 哈希表30. 串联所有单词的子串36. 有效的数独(很不错的循环题目)49. 字母异位词分组290. 单词规律447. 回旋镖的数量575. 分糖果594. 最长和谐子序列599. …...

spring boot项目中i18n和META-INF.spring下的文件的作用
目录标题一、resource下的文件二、i18n下messages_zh_CN.properties三、spring.factories文件四、org.springframework.boot.autoconfigure.AutoConfiguration.imports一、resource下的文件 org.springframework.boot.autoconfigure.AutoConfiguration.imports ; - …...

3年自动化测试经验,面试连20K都拿不到,现在都这么卷了吗····
我的情况 大概介绍一下个人情况,女,本科,三年多测试工作经验,懂python,会写脚本,会selenium,会性能,会自动化,然而到今天都没有收到一份offer!从2022年11月1…...
结构体的进阶应用)
基于算法竞赛的c++编程(28)结构体的进阶应用
结构体的嵌套与复杂数据组织 在C中,结构体可以嵌套使用,形成更复杂的数据结构。例如,可以通过嵌套结构体描述多层级数据关系: struct Address {string city;string street;int zipCode; };struct Employee {string name;int id;…...

uni-app学习笔记二十二---使用vite.config.js全局导入常用依赖
在前面的练习中,每个页面需要使用ref,onShow等生命周期钩子函数时都需要像下面这样导入 import {onMounted, ref} from "vue" 如果不想每个页面都导入,需要使用node.js命令npm安装unplugin-auto-import npm install unplugin-au…...

在四层代理中还原真实客户端ngx_stream_realip_module
一、模块原理与价值 PROXY Protocol 回溯 第三方负载均衡(如 HAProxy、AWS NLB、阿里 SLB)发起上游连接时,将真实客户端 IP/Port 写入 PROXY Protocol v1/v2 头。Stream 层接收到头部后,ngx_stream_realip_module 从中提取原始信息…...
:爬虫完整流程)
Python爬虫(二):爬虫完整流程
爬虫完整流程详解(7大核心步骤实战技巧) 一、爬虫完整工作流程 以下是爬虫开发的完整流程,我将结合具体技术点和实战经验展开说明: 1. 目标分析与前期准备 网站技术分析: 使用浏览器开发者工具(F12&…...

vue3 定时器-定义全局方法 vue+ts
1.创建ts文件 路径:src/utils/timer.ts 完整代码: import { onUnmounted } from vuetype TimerCallback (...args: any[]) > voidexport function useGlobalTimer() {const timers: Map<number, NodeJS.Timeout> new Map()// 创建定时器con…...

【HTTP三个基础问题】
面试官您好!HTTP是超文本传输协议,是互联网上客户端和服务器之间传输超文本数据(比如文字、图片、音频、视频等)的核心协议,当前互联网应用最广泛的版本是HTTP1.1,它基于经典的C/S模型,也就是客…...
项目部署到Linux上时遇到的错误(Redis,MySQL,无法正确连接,地址占用问题)
Redis无法正确连接 在运行jar包时出现了这样的错误 查询得知问题核心在于Redis连接失败,具体原因是客户端发送了密码认证请求,但Redis服务器未设置密码 1.为Redis设置密码(匹配客户端配置) 步骤: 1).修…...

关于uniapp展示PDF的解决方案
在 UniApp 的 H5 环境中使用 pdf-vue3 组件可以实现完整的 PDF 预览功能。以下是详细实现步骤和注意事项: 一、安装依赖 安装 pdf-vue3 和 PDF.js 核心库: npm install pdf-vue3 pdfjs-dist二、基本使用示例 <template><view class"con…...
淘宝扭蛋机小程序系统开发:打造互动性强的购物平台
淘宝扭蛋机小程序系统的开发,旨在打造一个互动性强的购物平台,让用户在购物的同时,能够享受到更多的乐趣和惊喜。 淘宝扭蛋机小程序系统拥有丰富的互动功能。用户可以通过虚拟摇杆操作扭蛋机,实现旋转、抽拉等动作,增…...

【Elasticsearch】Elasticsearch 在大数据生态圈的地位 实践经验
Elasticsearch 在大数据生态圈的地位 & 实践经验 1.Elasticsearch 的优势1.1 Elasticsearch 解决的核心问题1.1.1 传统方案的短板1.1.2 Elasticsearch 的解决方案 1.2 与大数据组件的对比优势1.3 关键优势技术支撑1.4 Elasticsearch 的竞品1.4.1 全文搜索领域1.4.2 日志分析…...