(六)正点原子STM32MP135移植——内核移植
目录
一、概述
二、编译官方代码
三、移植
四、编译
一、概述
前面已经移植好了TF-A、optee、u-boot,在u-boot能正常跑起来的情况下,现在来移植内核。
二、编译官方代码
进入kernel目录
2.1 解压源码、打补丁
/* 解压源码 */
tar xf linux-6.1.28.tar.xz/* 进入源码目录 */
cd linux-6.1.28//* 打补丁 */
for p in `ls -1 ../*.patch`; do patch -p1 < $p; done2.2 配置Kernel
根据官方手册进行配置即可
/* 配置交叉编译器 */
source /opt/st/stm32mp1/4.2.1-openstlinux-6.1-yocto-mickledore-mp1-v23.06.21/environment-setup-cortexa7t2hf-neon-vfpv4-ostl-linux-gnueabi /* 输出文件夹 */
export OUTPUT_BUILD_DIR=$PWD/../build
mkdir -p ${OUTPUT_BUILD_DIR}/* 默认配置文件 */
make ARCH=arm O="${OUTPUT_BUILD_DIR}" multi_v7_defconfig fragment*.config2.3 编译内核
编译模块好像要好久,可以不要编译
/* 编译uImage 设备树 */
make ARCH=arm uImage vmlinux dtbs LOADADDR=0xC2000040 O="${OUTPUT_BUILD_DIR}"/* 编译模块 */
make ARCH=arm modules O="${OUTPUT_BUILD_DIR}"/* 配置输出文件路径 */
make ARCH=arm INSTALL_MOD_PATH="${OUTPUT_BUILD_DIR}/install_artifact" modules_install O="${OUTPUT_BUILD_DIR}"
mkdir -p ${OUTPUT_BUILD_DIR}/install_artifact/boot//* 拷贝输出文件 */
cp ${OUTPUT_BUILD_DIR}/arch/arm/boot/uImage ${OUTPUT_BUILD_DIR}/install_artifact/boot/
cp ${OUTPUT_BUILD_DIR}/arch/arm/boot/dts/st*.dtb ${OUTPUT_BUILD_DIR}/install_artifact/boot/这时候去查看build/install_artifact目录下,有boot和lib两个文件夹,boot里有uImage和设备树,lib里是内核模块
三、移植
3.1 复制文件
/* 进入设备树目录 */
cd arch/arm/boot/dts/cp stm32mp135f-dk.dts stm32mp135-atk.dts
cp stm32mp13-pinctrl.dtsi stm32mp135-pinctrl-atk.dtsi/* 回到源码根目录 */
cd ../../../../3.2 修改头文件
打开stm32mp135-atk.dts,把引脚头文件改成我们的
// #include "stm32mp13-pinctrl.dtsi"
#include "stm32mp13-pinctrl-atk.dtsi"3.3 修改电源
首先找到&scmi_regu节点,全都干掉
// &scmi_regu {
// scmi_vddcpu: voltd-vddcpu {
// reg = <VOLTD_SCMI_STPMIC1_BUCK1>;
// regulator-name = "vddcpu";
// };
// scmi_vdd: voltd-vdd {
// reg = <VOLTD_SCMI_STPMIC1_BUCK3>;
// regulator-name = "vdd";
// };
// scmi_vddcore: voltd-vddcore {
// reg = <VOLTD_SCMI_STPMIC1_BUCK4>;
// regulator-name = "vddcore";
// };
// scmi_vdd_adc: voltd-vdd-adc {
// reg = <VOLTD_SCMI_STPMIC1_LDO1>;
// regulator-name = "vdd_adc";
// };
// scmi_vdd_usb: voltd-vdd-usb {
// reg = <VOLTD_SCMI_STPMIC1_LDO4>;
// regulator-name = "vdd_usb";
// };
// scmi_vdd_sd: voltd-vdd-sd {
// reg = <VOLTD_SCMI_STPMIC1_LDO5>;
// regulator-name = "vdd_sd";
// };
// scmi_v1v8_periph: voltd-v1v8-periph {
// reg = <VOLTD_SCMI_STPMIC1_LDO6>;
// regulator-name = "v1v8_periph";
// };
// scmi_v3v3_sw: voltd-v3v3-sw {
// reg = <VOLTD_SCMI_STPMIC1_PWR_SW2>;
// regulator-name = "v3v3_sw";
// };
// };去根节点下添加我们对电源的描述,找到v3v3_ao这个节点,把它删了,替换成我们的
// v3v3_ao: v3v3-ao {// compatible = "regulator-fixed";// regulator-name = "v3v3_ao";// regulator-min-microvolt = <3300000>;// regulator-max-microvolt = <3300000>;// regulator-always-on;// };
vddcore: vddcore {compatible = "regulator-fixed";regulator-name = "vddcore";regulator-min-microvolt = <1250000>;regulator-max-microvolt = <1250000>;regulator-off-in-suspend;regulator-always-on;};vddcpu: vddcpu {compatible = "regulator-fixed";regulator-name = "vddcpu";regulator-min-microvolt = <1350000>;regulator-max-microvolt = <1350000>;regulator-off-in-suspend;regulator-always-on;};v3v3: v3v3 {compatible = "regulator-fixed";regulator-name = "v3v3";regulator-min-microvolt = <3300000>;regulator-max-microvolt = <3300000>;regulator-off-in-suspend;regulator-always-on;};vbus_otg: vbus_otg {compatible = "regulator-fixed";regulator-name = "vbus_otg";regulator-min-microvolt = <5000000>;regulator-max-microvolt = <5000000>;regulator-off-in-suspend;regulator-always-on;};vdd: vdd {compatible = "regulator-fixed";regulator-name = "vdd";regulator-min-microvolt = <3300000>;regulator-max-microvolt = <3300000>;regulator-off-in-suspend;regulator-always-on;};vdd_usb: vdd_usb {compatible = "regulator-fixed";regulator-name = "vdd_usb";regulator-min-microvolt = <3300000>;regulator-max-microvolt = <3300000>;regulator-off-in-suspend;regulator-always-on;};v1v8_audio: regulator-v1v8_audio {compatible = "regulator-fixed";regulator-name = "v1v8_audio";regulator-min-microvolt = <1800000>;regulator-max-microvolt = <1800000>;regulator-always-on;regulator-boot-on;};v3v3_hdmi: regulator-v3v3-hdmi {compatible = "regulator-fixed";regulator-name = "v3v3_hdmi";regulator-min-microvolt = <3300000>;regulator-max-microvolt = <3300000>;regulator-always-on;regulator-boot-on;};v1v2_hdmi: regulator-v1v2-hdmi {compatible = "regulator-fixed";regulator-name = "v1v2_hdmi";regulator-min-microvolt = <1200000>;regulator-max-microvolt = <1200000>;regulator-always-on;regulator-boot-on;};3.4 添加看门狗
由于笔者前面移植u-boot、optee、TF-A哪里遗忘了一个iwdg2,正点原子使用的是iwdg2,而ST官方使用的是arm_wdt,如果前面用到了iwdg2,那就在这里添加上,如果没有则pass这一部分
&iwdg2 {timeout-sec = <32>;status = "okay";
};3.5 修改网络
找到eth1和eth2,修改成正点原子的
ð1 {status = "okay";pinctrl-0 = <ð1_rgmii_pins_a>;pinctrl-1 = <ð1_rgmii_sleep_pins_a>;pinctrl-names = "default", "sleep";phy-mode = "rgmii-id";max-speed = <1000>;phy-handle = <&phy0_eth1>;nvmem-cells = <ðernet_mac1_address>;nvmem-cell-names = "mac-address";mdio1 {#address-cells = <1>;#size-cells = <0>;compatible = "snps,dwmac-mdio";phy0_eth1: ethernet-phy@1 {reg = <1>;};};
};ð2 {status = "okay";pinctrl-0 = <ð2_rgmii_pins_a>;pinctrl-1 = <ð2_rgmii_sleep_pins_a>;pinctrl-names = "default", "sleep";phy-mode = "rgmii-id";max-speed = <1000>;phy-handle = <&phy0_eth2>;phy-supply = <&v3v3>;nvmem-cells = <ðernet_mac2_address>;nvmem-cell-names = "mac-address";mdio1 {#address-cells = <1>;#size-cells = <0>;compatible = "snps,dwmac-mdio";phy0_eth2: ethernet-phy@2 {reg = <2>;};};
};3.6 修改sdmmc
找到sdmmc1和sdmmc2,修改成我们的
&sdmmc1 {pinctrl-names = "default", "opendrain", "sleep";pinctrl-0 = <&sdmmc1_b4_pins_a &sdmmc1_clk_pins_a>;pinctrl-1 = <&sdmmc1_b4_od_pins_a &sdmmc1_clk_pins_a>;pinctrl-2 = <&sdmmc1_b4_sleep_pins_a>;cd-gpios = <&gpiof 15 (GPIO_ACTIVE_LOW | GPIO_PULL_UP)>;st,neg-edge;no-1-8-v;bus-width = <4>;vmmc-supply = <&v3v3>;#address-cells = <1>;#size-cells = <0>;status = "okay";
};/* EMMC */
&sdmmc2 {pinctrl-names = "default", "opendrain", "sleep";pinctrl-0 = <&sdmmc2_b4_pins_a &sdmmc2_b4_b7_pins_a &sdmmc2_clk_pins_a>;pinctrl-1 = <&sdmmc2_b4_od_pins_a &sdmmc2_b4_b7_od_pins_a &sdmmc2_clk_pins_a>;pinctrl-2 = <&sdmmc2_b4_sleep_pins_a &sdmmc2_b4_b7_sleep_pins_a>;non-removable;st,neg-edge;mmc-ddr-3_3v;no-1-8-v;bus-width = <8>;vmmc-supply = <&v3v3>;keep-power-in-suspend;#address-cells = <1>;#size-cells = <0>;status = "okay";
};3.7 删掉其它
如果根文件系统是在emmc里,只需要修改一个sdmmc2能用就行;如果根文件系统需要通过nfs挂载,那就需要修改eth1和eth2节点。而对于其他部分,USB、OTG、LCD等外设,都是可以删除的,这些都是正点原子会讲会移植的东西,所以笔者在这里把不需要的外设全部移除
1. usbh_ehci、usbotg_hs、usbphyc、usbphyc_port0、usbphyc_port1
2. usart1、 usart2、uart8
3. timers3、timers4、timers8、timers14
4. spi5
5. rtc
6. ltdc
7. i2c1、i2c5
8. dcmipp
9. adc1
10. 根节点下:gpio-keys、leds、panel_backlight、panel_rgb、wake_up、wifi_pwrseq
删除之后可以得到一个相对精简的设备树:
// SPDX-License-Identifier: (GPL-2.0+ OR BSD-3-Clause)
/** Copyright (C) STMicroelectronics 2021 - All Rights Reserved* Author: Alexandre Torgue <alexandre.torgue@foss.st.com> for STMicroelectronics.*//dts-v1/;#include <dt-bindings/gpio/gpio.h>
#include <dt-bindings/input/input.h>
#include <dt-bindings/leds/common.h>
#include <dt-bindings/regulator/st,stm32mp13-regulator.h>
#include <dt-bindings/rtc/rtc-stm32.h>
#include "stm32mp135.dtsi"
#include "stm32mp13xf.dtsi"
#include "stm32mp13-pinctrl-atk.dtsi"/ {model = "ATK STM32MP135-ATK Discovery Board";compatible = "st,stm32mp135-ATK", "st,stm32mp135";aliases {ethernet0 = ð1;ethernet1 = ð2;serial0 = &uart4;};chosen {stdout-path = "serial0:115200n8";#address-cells = <1>;#size-cells = <1>;ranges;framebuffer {compatible = "simple-framebuffer";clocks = <&rcc LTDC_PX>;status = "disabled";};};clocks {clk_ext_camera: clk-ext-camera {#clock-cells = <0>;compatible = "fixed-clock";clock-frequency = <24000000>;};clk_mco1: clk-mco1 {#clock-cells = <0>;compatible = "fixed-clock";clock-frequency = <24000000>;};};memory@c0000000 {device_type = "memory";reg = <0xc0000000 0x20000000>;};reserved-memory {#address-cells = <1>;#size-cells = <1>;ranges;optee@dd000000 {reg = <0xdd000000 0x3000000>;no-map;};};vddcore: vddcore {compatible = "regulator-fixed";regulator-name = "vddcore";regulator-min-microvolt = <1250000>;regulator-max-microvolt = <1250000>;regulator-off-in-suspend;regulator-always-on;};vddcpu: vddcpu {compatible = "regulator-fixed";regulator-name = "vddcpu";regulator-min-microvolt = <1350000>;regulator-max-microvolt = <1350000>;regulator-off-in-suspend;regulator-always-on;};v3v3: v3v3 {compatible = "regulator-fixed";regulator-name = "v3v3";regulator-min-microvolt = <3300000>;regulator-max-microvolt = <3300000>;regulator-off-in-suspend;regulator-always-on;};vbus_otg: vbus_otg {compatible = "regulator-fixed";regulator-name = "vbus_otg";regulator-min-microvolt = <5000000>;regulator-max-microvolt = <5000000>;regulator-off-in-suspend;regulator-always-on;};vdd: vdd {compatible = "regulator-fixed";regulator-name = "vdd";regulator-min-microvolt = <3300000>;regulator-max-microvolt = <3300000>;regulator-off-in-suspend;regulator-always-on;};vdd_usb: vdd_usb {compatible = "regulator-fixed";regulator-name = "vdd_usb";regulator-min-microvolt = <3300000>;regulator-max-microvolt = <3300000>;regulator-off-in-suspend;regulator-always-on;};v1v8_audio: regulator-v1v8_audio {compatible = "regulator-fixed";regulator-name = "v1v8_audio";regulator-min-microvolt = <1800000>;regulator-max-microvolt = <1800000>;regulator-always-on;regulator-boot-on;};v3v3_hdmi: regulator-v3v3-hdmi {compatible = "regulator-fixed";regulator-name = "v3v3_hdmi";regulator-min-microvolt = <3300000>;regulator-max-microvolt = <3300000>;regulator-always-on;regulator-boot-on;};v1v2_hdmi: regulator-v1v2-hdmi {compatible = "regulator-fixed";regulator-name = "v1v2_hdmi";regulator-min-microvolt = <1200000>;regulator-max-microvolt = <1200000>;regulator-always-on;regulator-boot-on;};
};&iwdg2 {timeout-sec = <32>;status = "okay";
};&arm_wdt {timeout-sec = <32>;status = "okay";
};&crc1 {status = "okay";
};&cryp {status = "okay";
};&dts {status = "okay";
};ð1 {status = "okay";pinctrl-0 = <ð1_rgmii_pins_a>;pinctrl-1 = <ð1_rgmii_sleep_pins_a>;pinctrl-names = "default", "sleep";phy-mode = "rgmii-id";max-speed = <1000>;phy-handle = <&phy0_eth1>;nvmem-cells = <ðernet_mac1_address>;nvmem-cell-names = "mac-address";mdio1 {#address-cells = <1>;#size-cells = <0>;compatible = "snps,dwmac-mdio";phy0_eth1: ethernet-phy@1 {reg = <1>;};};
};ð2 {status = "okay";pinctrl-0 = <ð2_rgmii_pins_a>;pinctrl-1 = <ð2_rgmii_sleep_pins_a>;pinctrl-names = "default", "sleep";phy-mode = "rgmii-id";max-speed = <1000>;phy-handle = <&phy0_eth2>;phy-supply = <&v3v3>;nvmem-cells = <ðernet_mac2_address>;nvmem-cell-names = "mac-address";mdio1 {#address-cells = <1>;#size-cells = <0>;compatible = "snps,dwmac-mdio";phy0_eth2: ethernet-phy@2 {reg = <2>;};};
};&sdmmc1 {pinctrl-names = "default", "opendrain", "sleep";pinctrl-0 = <&sdmmc1_b4_pins_a &sdmmc1_clk_pins_a>;pinctrl-1 = <&sdmmc1_b4_od_pins_a &sdmmc1_clk_pins_a>;pinctrl-2 = <&sdmmc1_b4_sleep_pins_a>;cd-gpios = <&gpiof 15 (GPIO_ACTIVE_LOW | GPIO_PULL_UP)>;st,neg-edge;no-1-8-v;bus-width = <4>;vmmc-supply = <&v3v3>;#address-cells = <1>;#size-cells = <0>;status = "okay";
};/* EMMC */
&sdmmc2 {pinctrl-names = "default", "opendrain", "sleep";pinctrl-0 = <&sdmmc2_b4_pins_a &sdmmc2_b4_b7_pins_a &sdmmc2_clk_pins_a>;pinctrl-1 = <&sdmmc2_b4_od_pins_a &sdmmc2_b4_b7_od_pins_a &sdmmc2_clk_pins_a>;pinctrl-2 = <&sdmmc2_b4_sleep_pins_a &sdmmc2_b4_b7_sleep_pins_a>;non-removable;st,neg-edge;mmc-ddr-3_3v;no-1-8-v;bus-width = <8>;vmmc-supply = <&v3v3>;keep-power-in-suspend;#address-cells = <1>;#size-cells = <0>;status = "okay";
};&uart4 {pinctrl-names = "default", "sleep", "idle";pinctrl-0 = <&uart4_pins_a>;pinctrl-1 = <&uart4_sleep_pins_a>;pinctrl-2 = <&uart4_idle_pins_a>;/delete-property/dmas;/delete-property/dma-names;status = "okay";
};3.8 修改引脚
由于前面删了很多无关外设,引脚我们只需要复制原子的部分即可:eth1、eth2、emmc1、emmc2
// SPDX-License-Identifier: (GPL-2.0+ OR BSD-3-Clause)
/** Copyright (C) STMicroelectronics 2021 - All Rights Reserved* Author: Alexandre Torgue <alexandre.torgue@foss.st.com>*/
#include <dt-bindings/pinctrl/stm32-pinfunc.h>&pinctrl {eth1_rgmii_pins_a: eth1-rgmii-1 {pins1 {pinmux = <STM32_PINMUX('F', 12, AF11)>, /* ETH1_RGMII_CLK125 */<STM32_PINMUX('C', 1, AF11)>, /* ETH1_RGMII_GTX_CLK */<STM32_PINMUX('G', 13, AF11)>, /* ETH1_RGMII_TXD0 */<STM32_PINMUX('G', 14, AF11)>, /* ETH1_RGMII_TXD1 */<STM32_PINMUX('C', 2, AF11)>, /* ETH1_RGMII_TXD2 */<STM32_PINMUX('E', 5, AF10)>, /* ETH1_RGMII_TXD3 */<STM32_PINMUX('B', 11, AF11)>, /* ETH1_RGMII_TX_CTL */<STM32_PINMUX('A', 2, AF11)>, /* ETH1_MDIO */<STM32_PINMUX('G', 2, AF11)>; /* ETH1_MDC */bias-disable;drive-push-pull;slew-rate = <2>;};pins2 {pinmux = <STM32_PINMUX('C', 4, AF11)>, /* ETH1_RGMII_RXD0 */<STM32_PINMUX('C', 5, AF11)>, /* ETH1_RGMII_RXD1 */<STM32_PINMUX('B', 0, AF11)>, /* ETH1_RGMII_RXD2 */<STM32_PINMUX('B', 1, AF11)>, /* ETH1_RGMII_RXD3 */<STM32_PINMUX('A', 1, AF11)>, /* ETH1_RGMII_RX_CLK */<STM32_PINMUX('A', 7, AF11)>; /* ETH1_RGMII_RX_CTL */bias-disable;};};eth1_rgmii_sleep_pins_a: eth1-rgmii-sleep-1 {pins1 {pinmux = <STM32_PINMUX('F', 12, ANALOG)>, /* ETH1_RGMII_CLK125 */<STM32_PINMUX('C', 1, ANALOG)>, /* ETH1_RGMII_GTX_CLK */<STM32_PINMUX('G', 13, ANALOG)>, /* ETH1_RGMII_TXD0 */<STM32_PINMUX('G', 14, ANALOG)>, /* ETH1_RGMII_TXD1 */<STM32_PINMUX('C', 2, ANALOG)>, /* ETH1_RGMII_TXD2 */<STM32_PINMUX('E', 5, ANALOG)>, /* ETH1_RGMII_TXD3 */<STM32_PINMUX('B', 11, ANALOG)>, /* ETH1_RGMII_TX_CTL */<STM32_PINMUX('A', 2, ANALOG)>, /* ETH1_MDIO */<STM32_PINMUX('G', 2, ANALOG)>, /* ETH1_MDC */<STM32_PINMUX('C', 4, ANALOG)>, /* ETH1_RGMII_RXD0 */<STM32_PINMUX('C', 5, ANALOG)>, /* ETH1_RGMII_RXD1 */<STM32_PINMUX('B', 0, ANALOG)>, /* ETH1_RGMII_RXD2 */<STM32_PINMUX('B', 1, ANALOG)>, /* ETH1_RGMII_RXD3 */<STM32_PINMUX('A', 1, ANALOG)>, /* ETH1_RGMII_RX_CLK */<STM32_PINMUX('A', 7, ANALOG)>; /* ETH1_RGMII_RX_CTL */};};eth2_rgmii_pins_a: eth2-rgmii-2 {pins1 {pinmux = <STM32_PINMUX('H', 2, AF13)>, /* ETH2_RGMII_CLK125 */<STM32_PINMUX('F', 7, AF11)>, /* ETH2_RGMII_TXD0 */<STM32_PINMUX('G', 11, AF10)>, /* ETH2_RGMII_TXD1 */<STM32_PINMUX('G', 1, AF10)>, /* ETH2_RGMII_TXD2 */<STM32_PINMUX('E', 6, AF11)>, /* ETH2_RGMII_TXD3 */<STM32_PINMUX('G', 3, AF10)>, /* ETH2_RGMII_GTX_CLK */<STM32_PINMUX('F', 6, AF11)>, /* ETH2_RGMII_TX_CTL */<STM32_PINMUX('B', 2, AF11)>, /* ETH2_MDIO */<STM32_PINMUX('G', 5, AF10)>; /* ETH2_MDC */bias-disable;drive-push-pull;slew-rate = <2>;};pins2 {pinmux = <STM32_PINMUX('F', 4, AF11)>, /* ETH2_RGMII_RXD0 */<STM32_PINMUX('E', 2, AF10)>, /* ETH2_RGMII_RXD1 */<STM32_PINMUX('H', 6, AF12)>, /* ETH2_RGMII_RXD2 */<STM32_PINMUX('A', 8, AF11)>, /* ETH2_RGMII_RXD3 */<STM32_PINMUX('H', 11, AF11)>, /* ETH2_RGMII_RX_CLK */<STM32_PINMUX('G', 12, AF12)>; /* ETH2_RGMII_RX_CTL */bias-disable;};};eth2_rgmii_sleep_pins_a: eth2-rgmii-sleep-2 {pins1 {pinmux = <STM32_PINMUX('H', 2, ANALOG)>, /* ETH2_RGMII_CLK125 */<STM32_PINMUX('F', 7, ANALOG)>, /* ETH2_RGMII_TXD0 */<STM32_PINMUX('G', 11, ANALOG)>, /* ETH2_RGMII_TXD1 */<STM32_PINMUX('G', 1, ANALOG)>, /* ETH2_RGMII_TXD2 */<STM32_PINMUX('E', 6, ANALOG)>, /* ETH2_RGMII_TXD3 */<STM32_PINMUX('G', 3, ANALOG)>, /* ETH2_RGMII_GTX_CLK */<STM32_PINMUX('F', 6, ANALOG)>, /* ETH2_RGMII_TX_CTL */<STM32_PINMUX('B', 2, ANALOG)>, /* ETH2_MDIO */<STM32_PINMUX('G', 5, ANALOG)>, /* ETH2_MDC */<STM32_PINMUX('F', 4, ANALOG)>, /* ETH2_RGMII_RXD0 */<STM32_PINMUX('E', 2, ANALOG)>, /* ETH2_RGMII_RXD1 */<STM32_PINMUX('H', 6, ANALOG)>, /* ETH2_RGMII_RXD2 */<STM32_PINMUX('A', 8, ANALOG)>, /* ETH2_RGMII_RXD3 */<STM32_PINMUX('H', 11, ANALOG)>, /* ETH2_RGMII_RX_CLK */<STM32_PINMUX('G', 12, ANALOG)>; /* ETH2_RGMII_RX_CTL */};};sdmmc1_b4_pins_a: sdmmc1-b4-0 {pins {pinmux = <STM32_PINMUX('C', 8, AF12)>, /* SDMMC1_D0 */<STM32_PINMUX('C', 9, AF12)>, /* SDMMC1_D1 */<STM32_PINMUX('C', 10, AF12)>, /* SDMMC1_D2 */<STM32_PINMUX('C', 11, AF12)>, /* SDMMC1_D3 */<STM32_PINMUX('D', 2, AF12)>; /* SDMMC1_CMD */slew-rate = <1>;drive-push-pull;bias-disable;};};sdmmc1_b4_od_pins_a: sdmmc1-b4-od-0 {pins1 {pinmux = <STM32_PINMUX('C', 8, AF12)>, /* SDMMC1_D0 */<STM32_PINMUX('C', 9, AF12)>, /* SDMMC1_D1 */<STM32_PINMUX('C', 10, AF12)>, /* SDMMC1_D2 */<STM32_PINMUX('C', 11, AF12)>; /* SDMMC1_D3 */slew-rate = <1>;drive-push-pull;bias-disable;};pins2 {pinmux = <STM32_PINMUX('D', 2, AF12)>; /* SDMMC1_CMD */slew-rate = <1>;drive-open-drain;bias-disable;};};sdmmc1_b4_sleep_pins_a: sdmmc1-b4-sleep-0 {pins {pinmux = <STM32_PINMUX('C', 8, ANALOG)>, /* SDMMC1_D0 */<STM32_PINMUX('C', 9, ANALOG)>, /* SDMMC1_D1 */<STM32_PINMUX('C', 10, ANALOG)>, /* SDMMC1_D2 */<STM32_PINMUX('C', 11, ANALOG)>, /* SDMMC1_D3 */<STM32_PINMUX('C', 12, ANALOG)>, /* SDMMC1_CK */<STM32_PINMUX('D', 2, ANALOG)>; /* SDMMC1_CMD */};};sdmmc1_clk_pins_a: sdmmc1-clk-0 {pins {pinmux = <STM32_PINMUX('C', 12, AF12)>; /* SDMMC1_CK */slew-rate = <1>;drive-push-pull;bias-disable;};};sdmmc2_b4_pins_a: sdmmc2-b4-0 {pins {pinmux = <STM32_PINMUX('B', 14, AF10)>, /* SDMMC2_D0 */<STM32_PINMUX('B', 15, AF10)>, /* SDMMC2_D1 */<STM32_PINMUX('B', 3, AF10)>, /* SDMMC2_D2 */<STM32_PINMUX('B', 4, AF10)>, /* SDMMC2_D3 */<STM32_PINMUX('G', 6, AF10)>; /* SDMMC2_CMD */slew-rate = <1>;drive-push-pull;bias-pull-up;};};sdmmc2_b4_b7_pins_a: sdmmc2-b4-b7-0 {pins {pinmux = <STM32_PINMUX('F', 0, AF10)>, /* SDMMC2_D4 */<STM32_PINMUX('B', 9, AF10)>, /* SDMMC2_D5 */<STM32_PINMUX('C', 6, AF10)>, /* SDMMC2_D6 */ <STM32_PINMUX('C', 7, AF10)>; /* SDMMC2_D7 */slew-rate = <1>;drive-push-pull;bias-pull-up;};};sdmmc2_b4_od_pins_a: sdmmc2-b4-od-0 {pins1 {pinmux = <STM32_PINMUX('B', 14, AF10)>, /* SDMMC2_D0 */<STM32_PINMUX('B', 15, AF10)>, /* SDMMC2_D1 */<STM32_PINMUX('B', 3, AF10)>, /* SDMMC2_D2 */<STM32_PINMUX('B', 4, AF10)>; /* SDMMC2_D3 */slew-rate = <1>;drive-push-pull;bias-pull-up;};pins2 {pinmux = <STM32_PINMUX('G', 6, AF10)>; /* SDMMC2_CMD */slew-rate = <1>;drive-open-drain;bias-pull-up;};};sdmmc2_b4_b7_od_pins_a: sdmmc2-b4-b7-od-0 {pins {pinmux = <STM32_PINMUX('F', 0, AF10)>, /* SDMMC2_D4 */<STM32_PINMUX('B', 9, AF10)>, /* SDMMC2_D5 */<STM32_PINMUX('C', 6, AF10)>, /* SDMMC2_D6 */ <STM32_PINMUX('C', 7, AF10)>; /* SDMMC2_D7 */slew-rate = <1>;drive-push-pull;bias-pull-up;};}; sdmmc2_b4_sleep_pins_a: sdmmc2-b4-sleep-0 {pins {pinmux = <STM32_PINMUX('B', 14, ANALOG)>, /* SDMMC2_D0 */<STM32_PINMUX('B', 15, ANALOG)>, /* SDMMC2_D1 */<STM32_PINMUX('B', 3, ANALOG)>, /* SDMMC2_D2 */<STM32_PINMUX('B', 4, ANALOG)>, /* SDMMC2_D3 */<STM32_PINMUX('E', 3, ANALOG)>, /* SDMMC2_CK */<STM32_PINMUX('G', 6, ANALOG)>; /* SDMMC2_CMD */};};sdmmc2_b4_b7_sleep_pins_a: sdmmc2-b4-b7-sleep-0 {pins {pinmux = <STM32_PINMUX('F', 0, ANALOG)>, /* SDMMC2_D4 */<STM32_PINMUX('B', 9, ANALOG)>, /* SDMMC2_D5 */<STM32_PINMUX('C', 6, ANALOG)>, /* SDMMC2_D6 */ <STM32_PINMUX('C', 7, ANALOG)>; /* SDMMC2_D7 */};};sdmmc2_clk_pins_a: sdmmc2-clk-0 {pins {pinmux = <STM32_PINMUX('E', 3, AF10)>; /* SDMMC2_CK */slew-rate = <1>;drive-push-pull;bias-pull-up;};};uart4_pins_a: uart4-0 {pins1 {pinmux = <STM32_PINMUX('D', 6, AF8)>; /* UART4_TX */bias-disable;drive-push-pull;slew-rate = <0>;};pins2 {pinmux = <STM32_PINMUX('D', 8, AF8)>; /* UART4_RX */bias-pull-up;};};uart4_idle_pins_a: uart4-idle-0 {pins1 {pinmux = <STM32_PINMUX('D', 6, ANALOG)>; /* UART4_TX */};pins2 {pinmux = <STM32_PINMUX('D', 8, AF8)>; /* UART4_RX */bias-pull-up;};};uart4_sleep_pins_a: uart4-sleep-0 {pins {pinmux = <STM32_PINMUX('D', 6, ANALOG)>, /* UART4_TX */<STM32_PINMUX('D', 8, ANALOG)>; /* UART4_RX */};};
};
3.9 修改Makefile
在源码目录下arch/arm/boot/dts/这个目录里有一个Makefile,找到里面的stm32
dtb-$(CONFIG_ARCH_STM32) += \stm32f429-disco.dtb \stm32f469-disco.dtb \stm32f746-disco.dtb \stm32f769-disco.dtb \stm32429i-eval.dtb \stm32746g-eval.dtb \stm32h743i-eval.dtb \stm32h743i-disco.dtb \stm32h750i-art-pi.dtb \stm32mp135f-dk.dtb \stm32mp135f-dk-a7-examples.dtb \stm32mp151a-prtt1a.dtb \stm32mp151a-prtt1c.dtb \stm32mp151a-prtt1s.dtb \stm32mp153c-dhcom-drc02.dtb \stm32mp153c-dhcor-drc-compact.dtb \stm32mp157a-avenger96.dtb \stm32mp157a-dhcor-avenger96.dtb \stm32mp157a-dk1.dtb \stm32mp157a-dk1-a7-examples.dtb \stm32mp157a-dk1-m4-examples.dtb \stm32mp157a-ed1.dtb \stm32mp157a-ev1.dtb \stm32mp157a-ev1-a7-examples.dtb \stm32mp157a-ev1-m4-examples.dtb \stm32mp157a-iot-box.dtb \stm32mp157a-microgea-stm32mp1-microdev2.0.dtb \stm32mp157a-microgea-stm32mp1-microdev2.0-of7.dtb \stm32mp157a-icore-stm32mp1-ctouch2.dtb \stm32mp157a-icore-stm32mp1-ctouch2-of10.dtb \stm32mp157a-icore-stm32mp1-edimm2.2.dtb \stm32mp157a-stinger96.dtb \stm32mp157c-dhcom-pdk2.dtb \stm32mp157c-dhcom-picoitx.dtb \stm32mp157c-dk2.dtb \stm32mp157c-dk2-a7-examples.dtb \stm32mp157c-dk2-m4-examples.dtb \stm32mp157c-ed1.dtb \stm32mp157c-emsbc-argon.dtb \stm32mp157c-ev1.dtb \stm32mp157c-ev1-a7-examples.dtb \stm32mp157c-ev1-m4-examples.dtb \stm32mp157c-lxa-mc1.dtb \stm32mp157c-odyssey.dtb \stm32mp157d-dk1.dtb \stm32mp157d-dk1-a7-examples.dtb \stm32mp157d-dk1-m4-examples.dtb \stm32mp157d-ed1.dtb \stm32mp157d-ev1.dtb \stm32mp157d-ev1-a7-examples.dtb \stm32mp157d-ev1-m4-examples.dtb \stm32mp157f-dk2.dtb \stm32mp157f-dk2-a7-examples.dtb \stm32mp157f-dk2-m4-examples.dtb \stm32mp157f-ed1.dtb \stm32mp157f-ev1.dtb \stm32mp157f-ev1-a7-examples.dtb \stm32mp157f-ev1-m4-examples.dtb \添加上我们的设备树,或者全删了只留我们自己的设备树
dtb-$(CONFIG_ARCH_STM32) += \stm32mp135-atk.dtb至此,内核所需要修改的文件已全部完成。
四、编译
4.1 配置内核
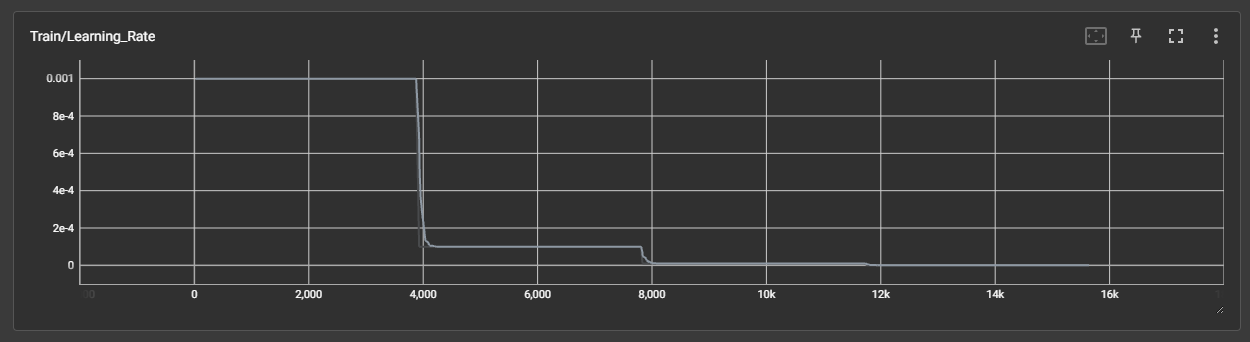
在这里笔者遇到一个问题,内核编译后直接跑,会提示无法修改CPU主频,然后上网找到了需要配置内核:
/* 打开Linux图形化配置界面 */
make ARCH=arm O="${OUTPUT_BUILD_DIR}" menuconfig->CPU Power Management
->CPU Frequency scaling
->[*] CPU frequency transition statistics
-> Default CPUFreq governor(userspace)
把CPUFreq改为userspace这个选项
cp ../build/.config arch/arm/configs/stm32mp135_atk_defconfig把配置文件保存为我们的默认配置文件,以便下次使用
4.2 编译
/* 编译内核、设备树 */
make ARCH=arm uImage vmlinux dtbs LOADADDR=0xC2000040 O="${OUTPUT_BUILD_DIR}"/* 复制文件到输出文件夹 */
cp ${OUTPUT_BUILD_DIR}/arch/arm/boot/uImage ${OUTPUT_BUILD_DIR}/install_artifact/boot/
cp ${OUTPUT_BUILD_DIR}/arch/arm/boot/dts/st*.dtb ${OUTPUT_BUILD_DIR}/install_artifact/boot/这时候查看build/install_artifact/boot文件夹,会发现有刚刚编译好的uImage和stm32mp135-atk.dtb,剩下的烧写就就可以根据原子的详细教程就行了
4.3 nfs挂载根文件系统
这里可能有个小小的坑,在设备树中,ethernet0是eth1,ethernet1是eth2,所以用nfs挂根文件系统的时候,应该选eth0或eth1。反正大家可以多尝试几个。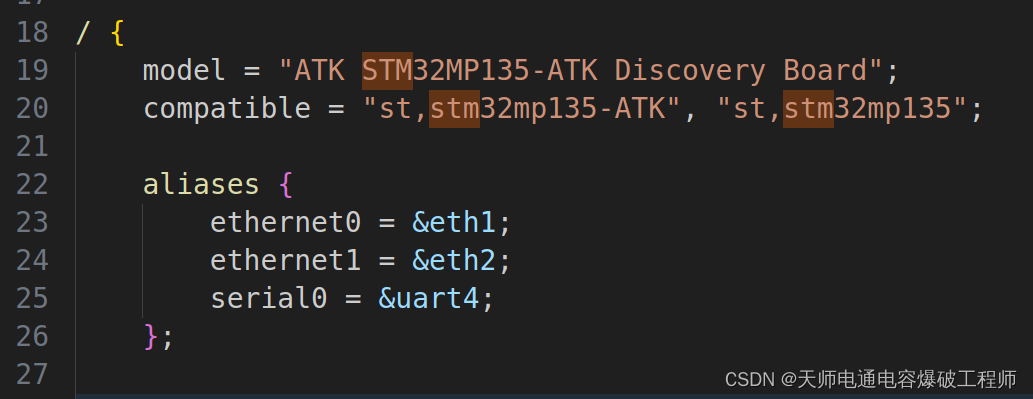
笔者用tftp和nfs启动内核:
setenv bootcmd 'tftp c2000000 uImage;tftp c4000000 stm32mp135-atk.dtb;bootm c2000000 - c4000000'
setenv bootargs 'console=ttySTM0,115200 root=/dev/nfs nfsroot=192.168.1.2:/home/zhangrl/Linux/nfs/rootfs,proto=tcp rw ip=192.168.1.3:192.168.1.2:192.168.1.1:255.255.255.0::eth1:off'4.4 emmc挂根文件系统
烧写到emmc中的时候,先去uboot里查看自己的内核在emmc的哪一个分区,rootfs在哪一个分区:
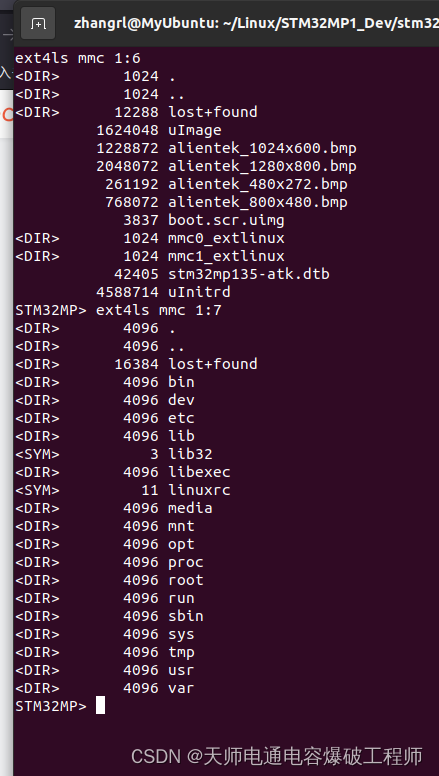
使用ext4ls命令,对一个一个分区进行扫描,直到看到自己的分区(笔者只会这个笨方法)
ext4ls:
第一个参数mmc,设备,选择mmc设备
第二个参数1,选择mmc1,就是我们的emmc
第三个参数,选择分区,一个一个试
知道自己的分区之后,就可以该bootcmd和bootargs:
setenv bootcmd 'ext4load mmc 1:6 c2000000 uImage;ext4load mmc 1:6 c4000000 stm32mp135-atk.dtb;bootm c2000000 - c4000000'
setenv bootargs 'console=ttySTM0,115200 root=/dev/mmcblk1p7 rootwait rw'至此,STM32MP135的全套移植教程完成,补上了正点原子的空白,剩下的根文件系统直接跟正点原子的教程即可,使用buildroot和busybox都可以。笔者今年刚学Linux,从i.mx6ull学完过来,对Linux的理解可能并不到位
如果文章有错误,希望大家指正
相关文章:
(六)正点原子STM32MP135移植——内核移植
目录 一、概述 二、编译官方代码 三、移植 四、编译 一、概述 前面已经移植好了TF-A、optee、u-boot,在u-boot能正常跑起来的情况下,现在来移植内核。 二、编译官方代码 进入kernel目录 2.1 解压源码、打补丁 /* 解压源码 */ tar xf linux-6.1.28.…...

自媒体工作内容管理助手
内容助手 访问地址:editor.yunwow.cn 背景介绍 最近在学习流量运营, 流量运营的第一站是内容创作, 我试过不少原创内容,都是跟生活相关的例如:录一段联琴的视频、录一段秋天的风景、写一段生活感悟、发一段小宠物的生…...

Echarts 教程一
Echarts 教程一 可视化大屏幕适配方案可视化大屏幕布局方案Echart 图表通用配置部分解决方案1. titile2. tooltip3. xAxis / yAxis 常用配置4. legend5. grid6. series7.color Echarts API 使用全局echarts对象echarts实例对象 可视化大屏幕适配方案 rem flexible.js 关于flex…...

【Kubernetes】Kubernetes 对象是什么?
什么是 Kubernetes 对象?常见的 Kubernetes 对象参考🔎感谢 💖 什么是 Kubernetes 对象? Kubernetes 对象是持久化的实体,用于描述整个集群的状态和配置。它们是在 etcd 等持久化存储中存储的,因此它们的状…...

【C++设计模式之模板模式】分析及示例
C之模板模式 描述实现原理示例步骤1步骤1 分析步骤2步骤2 分析调用输出结果 结论 描述 模板模式(Template Pattern)是设计模式中的一种行为型模式。 该模式定义一个操作中的算法骨架,而将具体的算法实现延迟到子类中。 模板模式使得子类可以…...
C#捕捉全局异常
1.运行图片 2.源码 using System; using System.Collections.Generic; using System.Linq; using System.Threading.Tasks; using System.Windows.Forms;namespace 捕捉全局异常 {internal static class Program{/// <summary>/// 应用程序的主入口点。/// </summary…...

java.text.ParseException: Unparseable date: “2023-09-06T09:08:18“
问题描述: java.text.ParseException: Unparseable date: “2023-09-06T09:08:18” 这是在String类型转Date类型出现的错误,主要是String类型时间中间有一个T在转换的过程出现问题. 解决方法: SimpleDateFormat simpleDateFormat new SimpleDateFormat…...

macOS 下如何优雅的使用 Burp Suite 汉化
转载 https://www.sqlsec.com/2019/11/macbp.html 主要内容是根据上面的来的 下面总结个人出现错误的地方 主要是优雅配置方面 不要直接复制粘贴 看清楚人家的内容 下面的可以直接复制粘贴 --add-opensjava.desktop/javax.swingALL-UNNAMED --add-opensjava.base/java.lang…...

进程同步与进程互斥
1.进程同步 知识点回顾: 进程具有异步性的特征。 异步性是指,各并发执行的进程以各自独立的、不可预知的速度向前推进。 如何解决这种异步问题,就是“进程同步”所讨论的内容。 同步亦称直接制约关系,它是指为完成某种任务而建立的两个或多…...

公司安防工程简要介绍及系统需求分析
多年来 从事安保监控领域的经验,在系统的功能要求、设备选型、施 工控制、 后期维护、人员配备等各方面反复论证,最终形成了本方案。在系统 的硬件选择上,把系统的稳定性、安全性、可靠性放在第一位。根据 招标文件的要求选用当今安防行业具…...
JMETER自适应高分辨率的显示器
系列文章目录 历史文章 每天15分钟JMeter入门篇(一):Hello JMeter 每天15分钟JMeter入门篇(二):使用JMeter实现并发测试 每天15分钟JMeter入门篇(三):认识JMeter的逻辑控…...
Linux工具(三)
继Linux工具(一)和Linux工具(二),下面我们就来讲解Linux最后的两个工具,分别是代码托管的版本控制器git和代码调试器gdb。 目录 1.git-版本控制器 从0到1的实现git代码托管 检测并安装git 新建git仓库…...
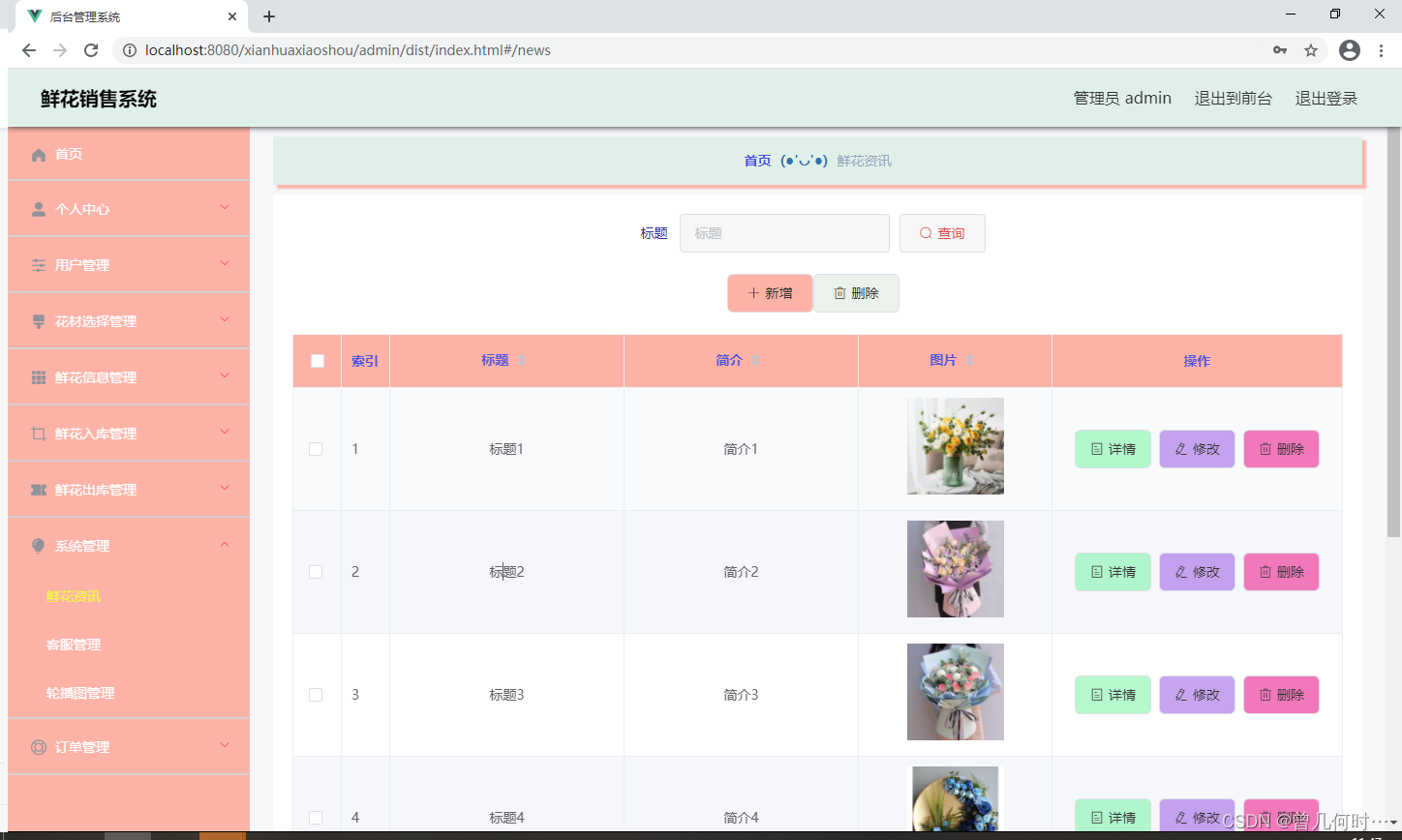
基于SSM+Vue的鲜花销售系统设计与实现
末尾获取源码 开发语言:Java Java开发工具:JDK1.8 后端框架:SSM 前端:采用Vue技术开发 数据库:MySQL5.7和Navicat管理工具结合 服务器:Tomcat8.5 开发软件:IDEA / Eclipse 是否Maven项目&#x…...
矢量图形编辑软件illustrator 2023 mac特点介绍
illustrator 2023 mac是一款矢量图形编辑软件,用于创建和编辑排版、图标、标志、插图和其他类型的矢量图形。 illustrator mac软件特点 矢量图形:illustrator创建的图形是矢量图形,可以无限放大而不失真,这与像素图形编辑软件&am…...
【计算机网络面试题(62道)】
文章目录 计算机网络面试题(62道)基础1.**说下计算机网络体系结构2.说一下每一层对应的网络协议有哪些?3.那么数据在各层之间是怎么传输的呢? 网络综合4.**从浏览器地址栏输入 url 到显示主页的过程?5.说说 DNS 的解析…...
JVM-满老师
JVM 前言程序计数器,栈,虚拟机栈:本地方法栈:堆,方法区:堆内存溢出方法区运行时常量池 垃圾回收垃圾回收算法分代回收 前言 JVM 可以理解的代码就叫做字节码(即扩展名为 .class 的文件ÿ…...
加锁常见的问题
锁其是用来控制在某些场景下让代码串行的工具。我们为了充分利用计算机的硬件性能,发明了多线程,多线程有好处,但同时也有它复杂的一面,必须控制好多个线程的执行,才能驯服这个有能力也有脾气的烈马。 一、加锁范围误区…...

【LeetCode力扣】LCR170 使用归并排序的思想解决逆序对问题(详细图解)
目录 1、题目介绍 2、解题思路 2.1、暴力破解法 2.2、归并排序思想 2.2.1、画图详细讲解 2.2.2、归并排序解决逆序对的代码实现 1、题目介绍 首先阅读题目可以得出要点,即当前数大于后数时则当作一个【逆序对】,而题目是要求在一个数组中计算一共存…...

python经典百题之一个素数能被几个9整除
题目:判断一个素数能被几个9整除。 首先,我们需要明确素数的定义:素数是大于1,且只能被1和自身整除的整数。 下面将分别介绍三种实现方法,每种方法附上解题思路、实现代码、以及优缺点。最后,将对这三种方法进行总结…...

Thymeleaf 内联语法使用教程
1 表达式内联 Thymeleaf标准方言允许使用标签属性(th:)来实现很多的功能,但在有些场景之下,需要将表达式直接写入HTML 代码中和CSS代码中及JavaScript代码中【代码和html文件在一起,分能不开,待验证,有验证的朋友可…...

C++_核心编程_多态案例二-制作饮品
#include <iostream> #include <string> using namespace std;/*制作饮品的大致流程为:煮水 - 冲泡 - 倒入杯中 - 加入辅料 利用多态技术实现本案例,提供抽象制作饮品基类,提供子类制作咖啡和茶叶*//*基类*/ class AbstractDr…...

PHP和Node.js哪个更爽?
先说结论,rust完胜。 php:laravel,swoole,webman,最开始在苏宁的时候写了几年php,当时觉得php真的是世界上最好的语言,因为当初活在舒适圈里,不愿意跳出来,就好比当初活在…...

Leetcode 3577. Count the Number of Computer Unlocking Permutations
Leetcode 3577. Count the Number of Computer Unlocking Permutations 1. 解题思路2. 代码实现 题目链接:3577. Count the Number of Computer Unlocking Permutations 1. 解题思路 这一题其实就是一个脑筋急转弯,要想要能够将所有的电脑解锁&#x…...
Cinnamon修改面板小工具图标
Cinnamon开始菜单-CSDN博客 设置模块都是做好的,比GNOME简单得多! 在 applet.js 里增加 const Settings imports.ui.settings;this.settings new Settings.AppletSettings(this, HTYMenusonichy, instance_id); this.settings.bind(menu-icon, menu…...
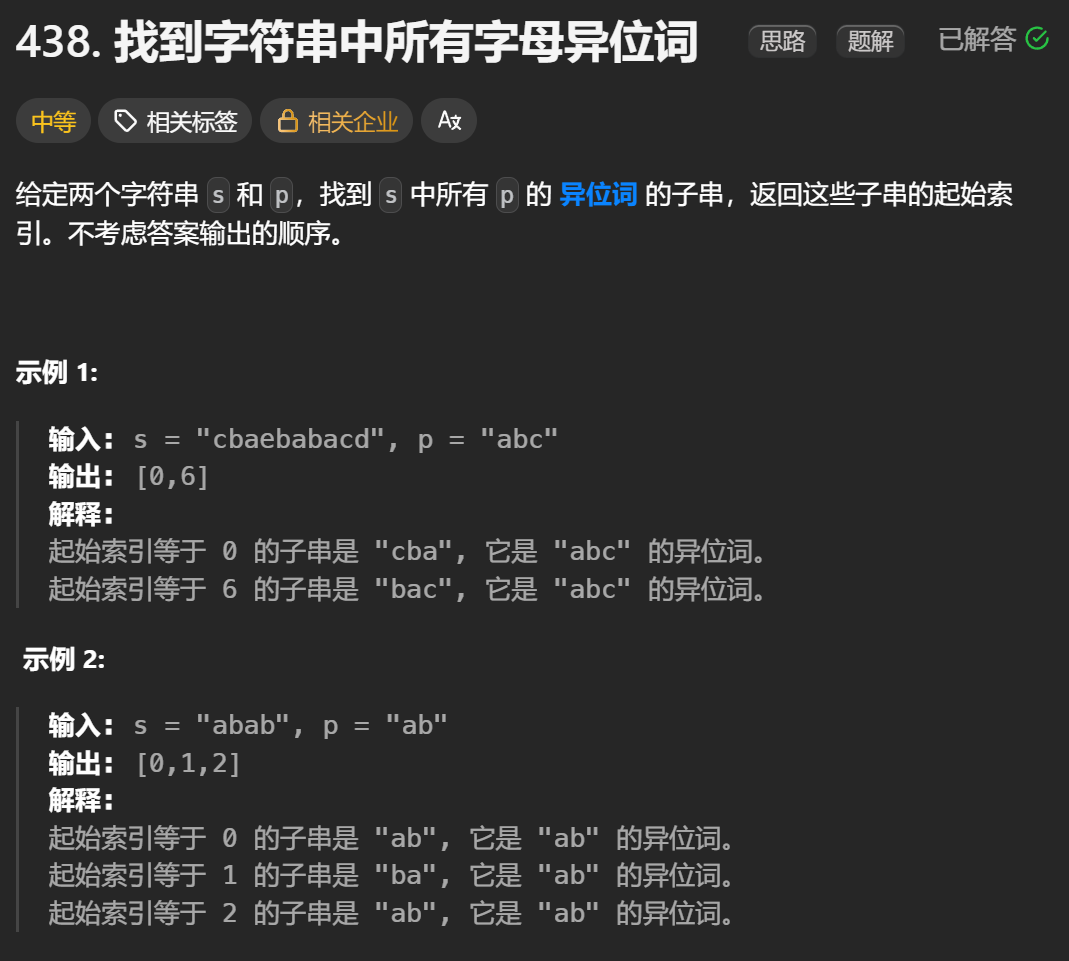
12.找到字符串中所有字母异位词
🧠 题目解析 题目描述: 给定两个字符串 s 和 p,找出 s 中所有 p 的字母异位词的起始索引。 返回的答案以数组形式表示。 字母异位词定义: 若两个字符串包含的字符种类和出现次数完全相同,顺序无所谓,则互为…...

selenium学习实战【Python爬虫】
selenium学习实战【Python爬虫】 文章目录 selenium学习实战【Python爬虫】一、声明二、学习目标三、安装依赖3.1 安装selenium库3.2 安装浏览器驱动3.2.1 查看Edge版本3.2.2 驱动安装 四、代码讲解4.1 配置浏览器4.2 加载更多4.3 寻找内容4.4 完整代码 五、报告文件爬取5.1 提…...

学习一下用鸿蒙DevEco Studio HarmonyOS5实现百度地图
在鸿蒙(HarmonyOS5)中集成百度地图,可以通过以下步骤和技术方案实现。结合鸿蒙的分布式能力和百度地图的API,可以构建跨设备的定位、导航和地图展示功能。 1. 鸿蒙环境准备 开发工具:下载安装 De…...
DAY 45 超大力王爱学Python
来自超大力王的友情提示:在用tensordoard的时候一定一定要用绝对位置,例如:tensorboard --logdir"D:\代码\archive (1)\runs\cifar10_mlp_experiment_2" 不然读取不了数据 知识点回顾: tensorboard的发展历史和原理tens…...

接口 RESTful 中的超媒体:REST 架构的灵魂驱动
在 RESTful 架构中,** 超媒体(Hypermedia)** 是一个核心概念,它体现了 REST 的 “表述性状态转移(Representational State Transfer)” 的本质,也是区分 “真 RESTful API” 与 “伪 RESTful AP…...

【2D与3D SLAM中的扫描匹配算法全面解析】
引言 扫描匹配(Scan Matching)是同步定位与地图构建(SLAM)系统中的核心组件,它通过对齐连续的传感器观测数据来估计机器人的运动。本文将深入探讨2D和3D SLAM中的各种扫描匹配算法,包括数学原理、实现细节以及实际应用中的性能对比,特别关注…...