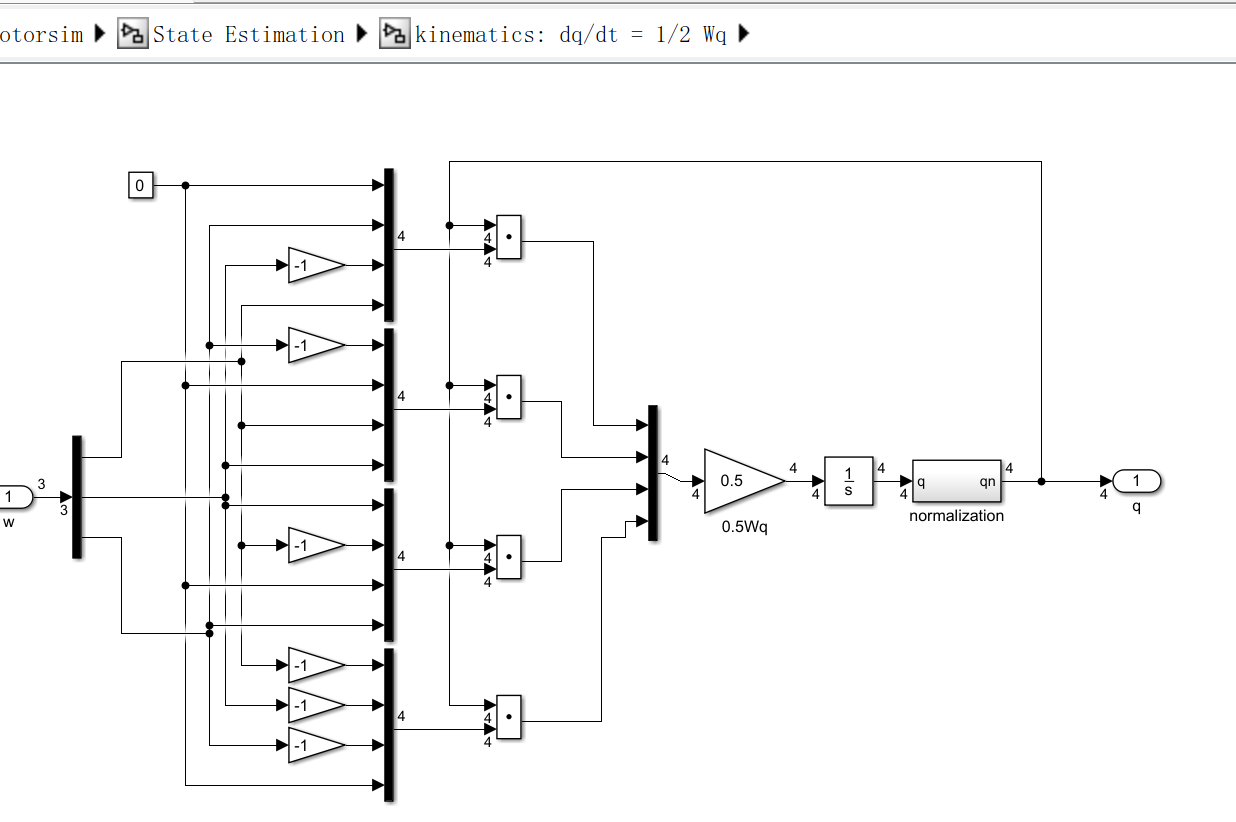
【四旋翼飞行器】模拟四旋翼飞行器的平移和旋转动力学(Simulink仿真实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码、Simulink仿真及文献

💥1 概述
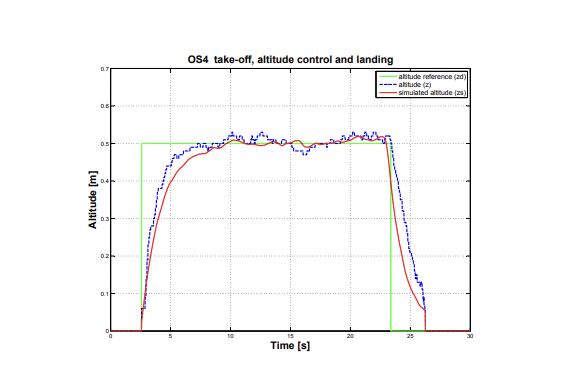
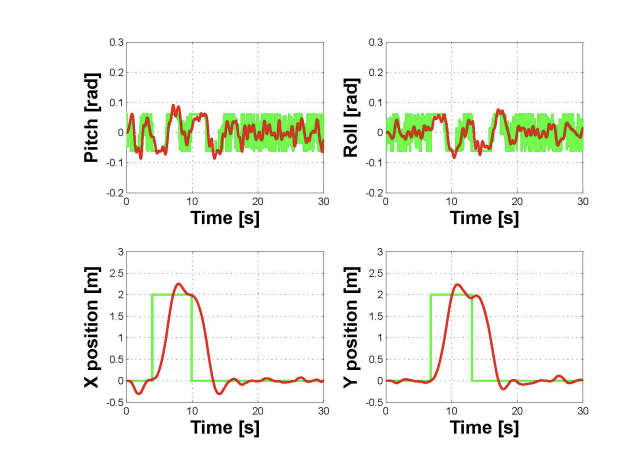
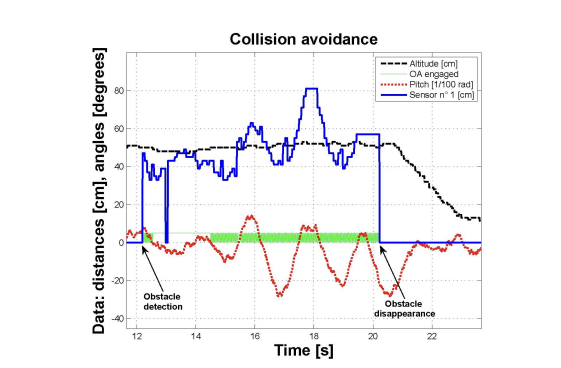
摘要-由于民用和军用无人机(Unmanned Aerial Vehicles, UAV)的兴趣日益增长,对自主微型飞行机器人的研究得到了显著加强。本文总结了OS4项目建模和控制部分的最终结果,该项目的重点是四旋翼设计和控制。文章介绍了一个考虑到飞行器运动引起的空气动力学系数变化的仿真模型。利用该模型找到的控制参数成功地应用于直升机上,无需重新调整。本文的最后部分描述了控制方法(积分反馈)和我们提出的四旋翼完全控制方案(姿态、高度和位置)。最后,介绍了自主起飞、悬停、降落和避障的结果。
飞行物体一直以来都对人类产生着巨大的吸引力,鼓励各种研究和发展。这个项目始于2003年,当时机器人学界对无人机(Unmanned Aerial Vehicles, UAV)的发展表现出越来越大的兴趣。在拥挤环境下设计和控制无人机的科学挑战以及缺乏现有解决方案的情况非常激发人们的积极性。另一方面,军事和民用市场上广泛的应用领域鼓励了与无人机相关项目的资金支持。从项目开始就决定专注于一种特定的配置:四旋翼飞行器。这种选择不仅源于其动力学特性,这代表了一个有吸引力的控制问题,还源于设计问题。将传感器、执行器和智能集成到一个轻量级的垂直飞行系统中,并保持良好的运行时间并不是一件简单的事情。
A. 现状
在过去几年中,四旋翼飞行器控制的现状发生了巨大的变化。解决这个问题的项目数量大幅增加。这些项目中的大多数是基于商用玩具,如Draganflyer [1],后来进行了修改以增加更多的传感和通信功能。只有少数几个团队解决了MFR设计问题。论文[2]列举了过去10年中一些最重要的四旋翼项目。Mesicopter项目[3]始于1999年,于2001年结束。它旨在研究厘米级四旋翼的可行性。E. Altug在他的论文中介绍了2003年的双摄像头视觉反馈控制[4]。

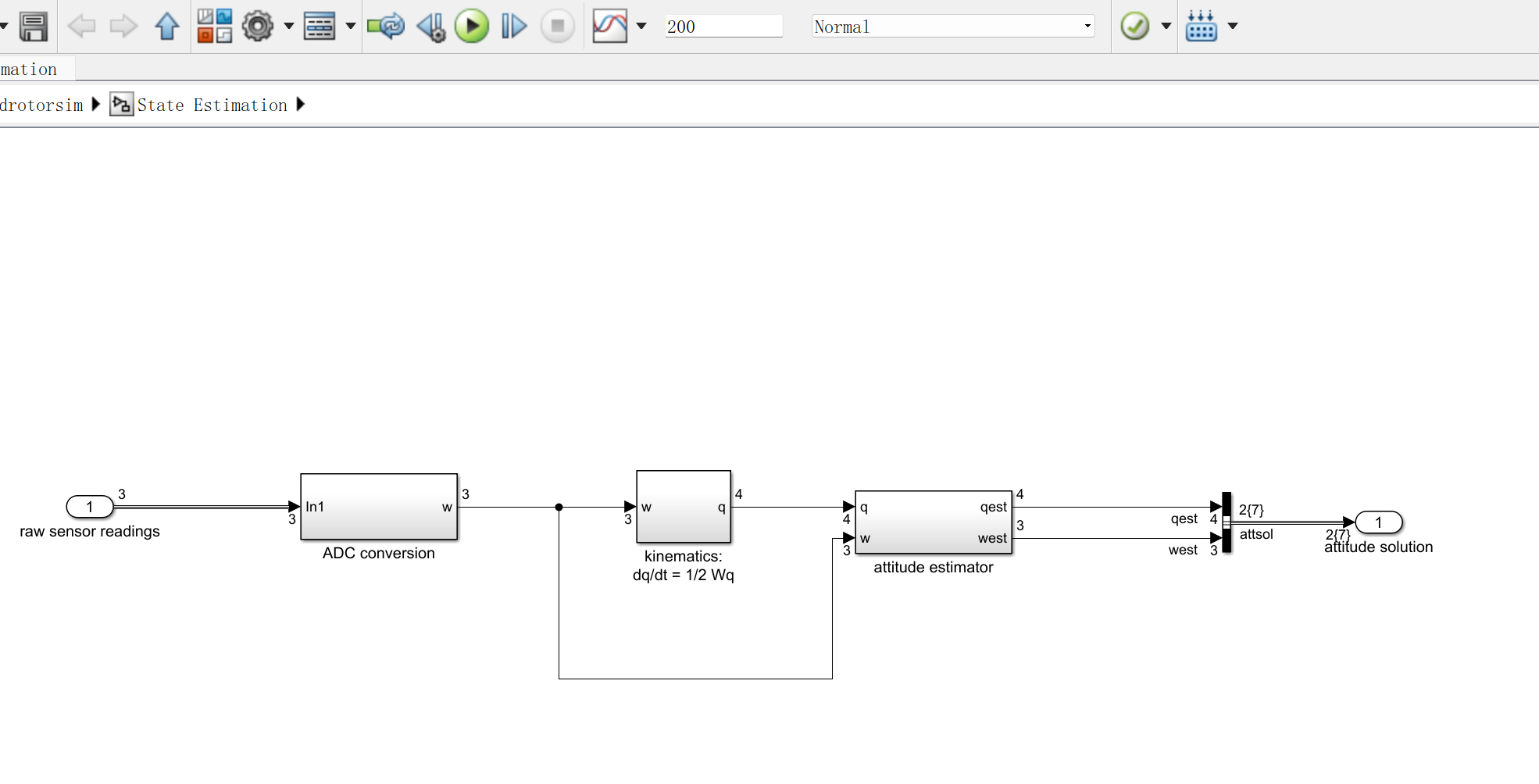
详细讲解见第4部分。

📚2 运行结果

Matlab代码:
% KF_setup.m 19/11/2013
%Quadrotor Sim
%
%
% Purpose: to declare initial values
%
%%
%% sensor noises
position_uncertainty_var = (20/3600*pi/180)^2*ones(3,1);
%% simulation set up
step_time = 0.5; % simulation step time(sec)
end_time = 1000; % simulation end time (sec)
%end_time = 86400;
%% attitude estimator gains
Tatd = 0.5; % attitude estimator update time (sec)
Tqint = 0.5; % discrete quaternion integration period (sec)
Tsen_out = 0.5; % sensor output period (sec)
TkfProp = 0.5; % Kalman filter propagation period (sec)
KfupdatePeriodInCycle = 1; % Kalman filter update period (propagation cycle)
f_bw_atd = 0.02; % attitude determination bandwidth (hz)
%f_bw_atd = 0.005;
zeta = 0.7;
Krp = (2*pi*f_bw_atd)^2 * eye(3);
Kpp = 2*zeta*2*pi*f_bw_atd*eye(3);
qest0 = [0*1e-4; 0; 0; 1]; % initial estimator quaternion
delta_west0 = zeros(3,1); % initial deviation of estimator angular rate (rad/sec)
max_delta_w = 0.1*pi/180;
delta_w_lim = 2e-4; %0.1/pi/Tqint;
delta_th_lim= 1e-4; %0.1*pi/180/Tqint;
q0 = [0; 0; 0; 1]; %% for estimate error standard deviation prediction calculation
wn=sqrt(diag(Krp));
k=sqrt((wn.^4+4*zeta^2)./(4*zeta*wn));
%% for using Lyapunove equation to solve for expected estimation error
C=[1 0]; K=[Kpp(1,1);Krp(1,1)]; A=[0 1;0 0]-K*C; B=K;
H=[1 0]; K=[Kpp(1,1);Krp(1,1)]*Tatd; F=[1 Tatd;0 1]-K*H; G=K;
%% Kalman filter setups
Fmat = [eye(3) TkfProp*eye(3);zeros(3,3) eye(3)];
Hmat = [eye(3) zeros(3,3)];
therr0 = max([abs(qest0(1:3)); 5*1e-4]); % initial error estimate, assuming q0=[0 0 0 1]
P0 = diag([therr0^2*ones(1,3) 3e-6^2*ones(1,3)]);
R = TkfProp*KfupdatePeriodInCycle*diag(position_uncertainty_var);%1e-3^2*eye(3)*
Q = diag([1e-5^2*ones(1,3), 1e-7^2*ones(1,3)])*TkfProp;
max_rate = pi/180;
P0 = diag([1e-32*ones(1,3) 1e-5^2*ones(1,3)]);
Q = diag([1e-5^2*ones(1,3), 5e-6^2*ones(1,3)])*TkfProp;
max_bias = 1*pi/180/3600;
%% start simulation
Tcapt = Tsen_out; % sim variable capture rate (sec)% KF_setup.m 19/11/2013
%Quadrotor Sim
%
%
% Purpose: to declare initial values
%
%%
%% sensor noises
position_uncertainty_var = (20/3600*pi/180)^2*ones(3,1);
%% simulation set up
step_time = 0.5; % simulation step time(sec)
end_time = 1000; % simulation end time (sec)
%end_time = 86400;
%% attitude estimator gains
Tatd = 0.5; % attitude estimator update time (sec)
Tqint = 0.5; % discrete quaternion integration period (sec)
Tsen_out = 0.5; % sensor output period (sec)
TkfProp = 0.5; % Kalman filter propagation period (sec)
KfupdatePeriodInCycle = 1; % Kalman filter update period (propagation cycle)
f_bw_atd = 0.02; % attitude determination bandwidth (hz)
%f_bw_atd = 0.005;
zeta = 0.7;
Krp = (2*pi*f_bw_atd)^2 * eye(3);
Kpp = 2*zeta*2*pi*f_bw_atd*eye(3);
qest0 = [0*1e-4; 0; 0; 1]; % initial estimator quaternion
delta_west0 = zeros(3,1); % initial deviation of estimator angular rate (rad/sec)
max_delta_w = 0.1*pi/180;
delta_w_lim = 2e-4; %0.1/pi/Tqint;
delta_th_lim= 1e-4; %0.1*pi/180/Tqint;
q0 = [0; 0; 0; 1];
%% for estimate error standard deviation prediction calculation
wn=sqrt(diag(Krp));
k=sqrt((wn.^4+4*zeta^2)./(4*zeta*wn));
%% for using Lyapunove equation to solve for expected estimation error
C=[1 0]; K=[Kpp(1,1);Krp(1,1)]; A=[0 1;0 0]-K*C; B=K;
H=[1 0]; K=[Kpp(1,1);Krp(1,1)]*Tatd; F=[1 Tatd;0 1]-K*H; G=K;
%% Kalman filter setups
Fmat = [eye(3) TkfProp*eye(3);zeros(3,3) eye(3)];
Hmat = [eye(3) zeros(3,3)];
therr0 = max([abs(qest0(1:3)); 5*1e-4]); % initial error estimate, assuming q0=[0 0 0 1]
P0 = diag([therr0^2*ones(1,3) 3e-6^2*ones(1,3)]);
R = TkfProp*KfupdatePeriodInCycle*diag(position_uncertainty_var);%1e-3^2*eye(3)*
Q = diag([1e-5^2*ones(1,3), 1e-7^2*ones(1,3)])*TkfProp;
max_rate = pi/180;
P0 = diag([1e-32*ones(1,3) 1e-5^2*ones(1,3)]);
Q = diag([1e-5^2*ones(1,3), 5e-6^2*ones(1,3)])*TkfProp;
max_bias = 1*pi/180/3600;
%% start simulation
Tcapt = Tsen_out; % sim variable capture rate (sec)
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]杨维,周冰倩,吴志刚,等.四旋翼飞行器的设计与仿真分析[J].计算机光盘软件与应用, 2014, 17(16):2.DOI:CNKI:SUN:GPRJ.0.2014-16-154.
[2]高燕,虞旦.四旋翼飞行器的建模及控制算法仿真[J].工业控制计算机, 2014(9):3.DOI:10.3969/j.issn.1001-182X.2014.09.045.
[3]乔维维.四旋翼飞行器飞行控制系统研究与仿真[D].中北大学,2012.DOI:10.7666/d.D316360.
🌈4 Matlab代码、Simulink仿真及文献
相关文章:
【四旋翼飞行器】模拟四旋翼飞行器的平移和旋转动力学(Simulink仿真实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...
Kaggle - LLM Science Exam(一):赛事概述、数据收集、BERT Baseline
文章目录 一、赛事概述1.1 OpenBookQA Dataset1.2 比赛背景1.3 评估方法和代码要求1.4 比赛数据集1.5 优秀notebook 二、BERT Baseline2.1 数据预处理2.2 定义data_collator2.3 加载模型,配置trainer并训练2.4 预测结果并提交2.5 deberta-v3-large 1k Wikiÿ…...

mmap底层驱动实现(remap_pfn_range函数)
mmap底层驱动实现 myfb.c(申请了128K空间) #include <linux/init.h> #include <linux/tty.h> #include <linux/device.h> #include <linux/export.h> #include <linux/types.h> #include <linux/module.h> #inclu…...

品牌如何查窜货
当渠道中的产品出现不按规定区域销售时,这种行为就叫做窜货,窜货不仅会扰乱渠道的健康发展,损害经销商的利益,同时会滋生低价、假货的发生,有效的管控窜货,需要品牌先将窜货链店铺找出来,才能进…...

Java基于SpringBoot的车辆充电桩
博主介绍:✌程序员徐师兄、7年大厂程序员经历。全网粉丝30W,Csdn博客专家、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和毕业项目实战✌ 文章目录 1、效果演示效果图 技术栈2、 前言介绍(完整源码请私聊)3、主要技术3.4.1…...
【ARM】(1)架构简介
前言 ARM既可以认为是一个公司的名字,也可以认为是对一类微处理器的通称,还可以认为是一种技术的名字。 ARM公司是专门从事基于RISC技术芯片设计开发的公司,作为知识产权(IP)供应商,本身不直接从事芯片生产…...

企业完善质量、环境、健康安全三体系认证的作用及其意义!
一、ISO三体系标准作用 ISO9001:质量管理体系,专门针对企业的质量管理,投标首选,很多大客户要求企业必备这项。 ISO14001:环境管理体系,针对企业的生产环境,排污,节能环保…...

<HarmonyOS第一课>运行Hello World——闯关习题及答案
判断题 1.DevEco Studio是开发HarmonyOS应用的一站式集成开发环境。( 对 ) 2.main_pages.json存放页面page路径配置信息。( 对 ) 单选题 1.在stage模型中,下列配置文件属于AppScope文件夹的是?ÿ…...

NLP 02 RNN
一、RNN RNN(Recurrent Neural Network),中文称作循环神经网络它一般以序列数据为输入通过网络内部的结构设计有效捕捉序列之间的关系特征,一般也是以序列形式进行输出。 传统神经网络(包括CNN),输入和输出都是互相独立的。但有些任务,后续的输出和之前…...

@PostConstruct注解
PostConstruct注解 PostConstruct注解是javax.annotation包下的一个注解,用于标记一个方法,在构造函数执行之后,依赖注入(如Autowired,意味着在方法内部可以安全地使用依赖注入的成员变量,而不会出现空指针异常&#…...

拓世AI|中秋节营销攻略,创意文案和海报一键生成
秋风意境多诗情,中秋月圆思最浓。又是一年中秋节,作为中国传统的重要节日之一,中秋节的意义早已不再仅仅是一家团圆的节日,更是一场商业盛宴。品牌方们纷纷加入其中,希望能够借助这一节日为自己的产品赢得更多的关注和…...
基于知识蒸馏的两阶段去雨去雪去雾模型学习记录(三)之知识测试阶段与评估模块
去雨去雾去雪算法分为两个阶段,分别是知识收集阶段与知识测试阶段,前面我们已经学习了知识收集阶段,了解到知识阶段的特征迁移模块(CKT)与软损失(SCRLoss),那么在知识收集阶段的主要重点便是HCRLoss(硬损失…...

代码随想录二刷day46
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、力扣139. 单词拆分二、力扣动态规划:关于多重背包,你该了解这些! 前言 提示:以下是本篇文章正文内容&#x…...

计算机竞赛 行人重识别(person reid) - 机器视觉 深度学习 opencv python
文章目录 0 前言1 技术背景2 技术介绍3 重识别技术实现3.1 数据集3.2 Person REID3.2.1 算法原理3.2.2 算法流程图 4 实现效果5 部分代码6 最后 0 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 深度学习行人重识别(person reid)系统 该项目…...

在线图片转BASE64、在线BASE64转图片
图片转BASE64、BASE64转图片...

什么是RPA?一文了解RPA发展与进程!
RPA(Robotic Process Automation,机器人流程自动化)是一种通过软件机器人模拟人类在计算机上执行重复性任务的技术。RPA的核心理念是将规则、过程和数据“机器人化”,从而实现对业务流程的自动化。RPA技术可以显著提高企业的工作效…...
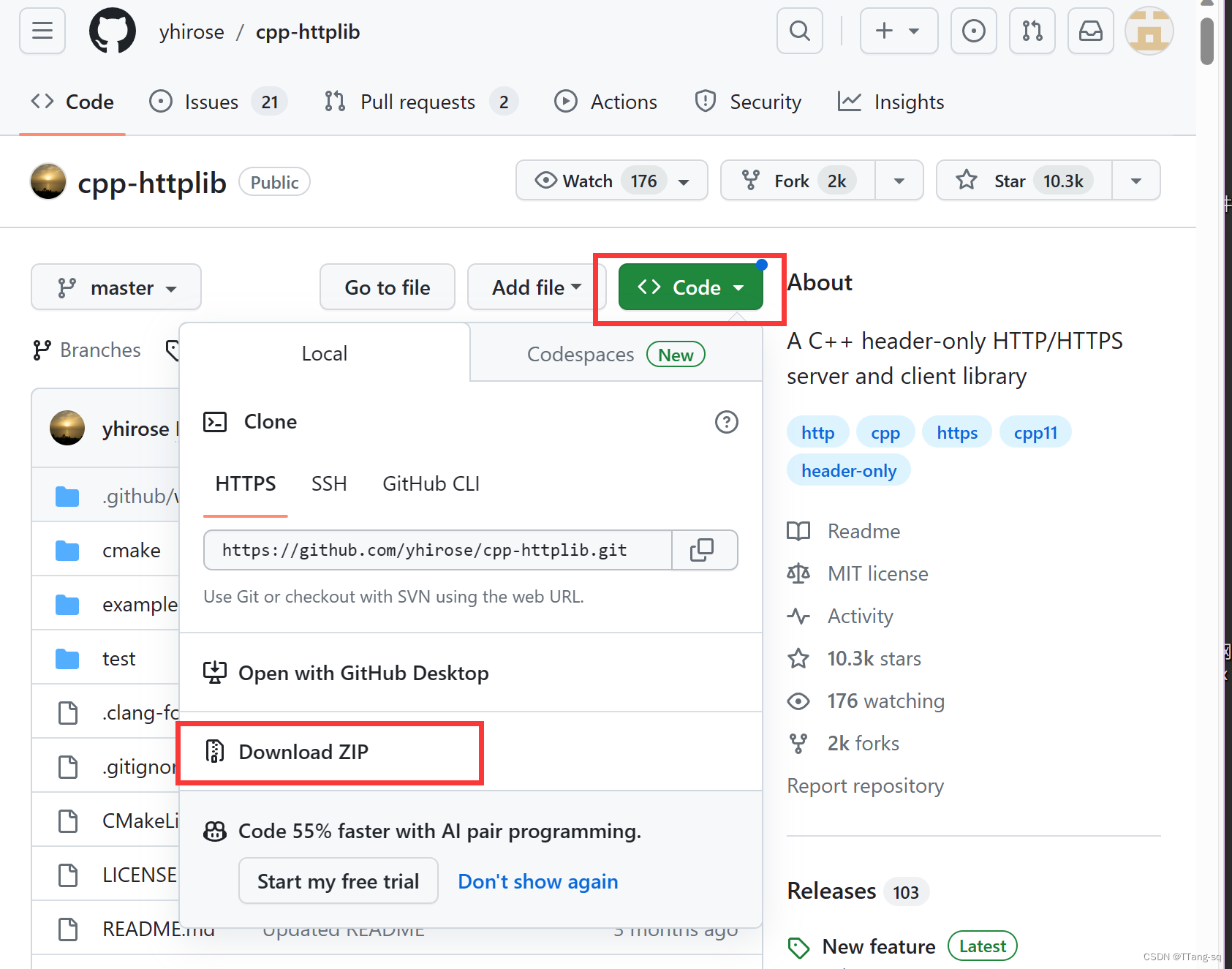
【云备份项目】【Linux】:环境搭建(g++、json库、bundle库、httplib库)
文章目录 1. g 升级到 7.3 版本2. 安装 jsoncpp 库3. 下载 bundle 数据压缩库4. 下载 httplib 库从 Win 传输文件到 Linux解压缩 1. g 升级到 7.3 版本 🔗链接跳转 2. 安装 jsoncpp 库 🔗链接跳转 3. 下载 bundle 数据压缩库 安装 git 工具 sudo yum…...

工信部教考中心:什么是《研发效能(DevOps)工程师》认证,拿到证书之后有什么作用!(下篇)丨IDCF
拿到证书有什么用? 提高职业竞争力:通过学习认证培训课程可以提升专业技能,了解项目或产品研发全生命周期的核心原则,掌握端到端的研发效能提升方法与实践,包括组织与协作、产品设计与运营、开发与交付、测试与安全、…...
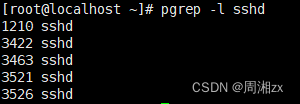
Linux进程相关管理(ps、top、kill)
目录 一、概念 二、查看进程 1、ps命令查看进程 1)ps显示某个时间点的程序运行情况 2)查看指定的进程信息 2、top命令查看进程 1)信息统计区: 2)进程信息区 3)交互式命令 三、信号控制进程 四、…...
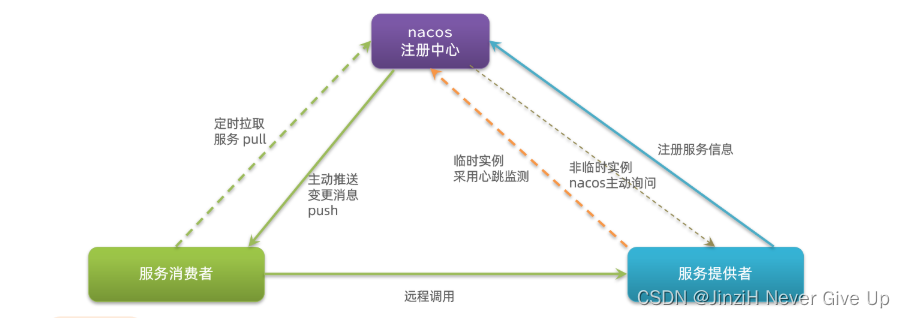
微服务技术栈-Ribbon负载均衡和Nacos注册中心
文章目录 前言一、Ribbon负载均衡1.LoadBalancerInterceptor(负载均衡拦截器)2.负载均衡策略IRule 二、Nacos注册中心1.Nacos简介2.搭建Nacos注册中心3.服务分级存储模型4.环境隔离5.Nacos与Eureka的区别 总结 前言 在上面那个文章中介绍了微服务架构的…...

2026届学术党必备的六大AI科研工具解析与推荐
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 一键生成论文功能通过借助先进人工智能算法得以达成,它可依照用户输入的标题&am…...

航美实木板:以匠心守健康,用实力赢信赖——一位经销商的真情告白
“一张好的板材,守护的不是一个人,而是一个家庭的健康与幸福。”说这句话的汪总,是实木行业的“老炮儿”,深耕实木定制多年的他,对木材“热胀冷缩必变形开裂”的特性深信不疑。直到刷到航美实木板的宣传视频࿰…...

本科论文知网AI率高的原因和解决方法全在这里
知网AIGC检测出来AI率高,很多同学第一反应是"我没有全程用AI写啊,为什么这么高?"这个问题确实需要好好解释一下——知网检测到的AI率高,未必是因为你完全靠AI写的。 知网AIGC检测是怎么工作的 知网的AIGC检测系统会分…...

pg_activity快速入门:如何在5分钟内开始监控PostgreSQL服务器
pg_activity快速入门:如何在5分钟内开始监控PostgreSQL服务器 【免费下载链接】pg_activity pg_activity is a top like application for PostgreSQL server activity monitoring. 项目地址: https://gitcode.com/gh_mirrors/pg/pg_activity PostgreSQL数据库…...

【VLA】Vision Language Action
文章目录一、什么是世界模型(World Model)?✅ 定义:🌍 核心功能:🔧 技术原理(典型架构):二、世界模型在具身智能中的作用三、VLA(Vision-Language…...

向量数据库:大模型的高效外存
一、 向量数据库概述:AI大模型的“外部记忆体” 向量数据库是一种专门用于存储、索引和查询**向量嵌入(Vector Embedding)**的数据库系统。在大模型时代,它扮演着至关重要的“外部记忆体”角色,其核心价值在于解决大模…...

AI建站工具怎么选?一篇讲透选型标准与对比逻辑
面对市面上五花八门的“智能建站”、“免代码建站”宣传,很多人越看越糊涂:到底哪个才是真的适合我?是选AI自动生成的,还是拖拽式更灵活?这篇不直接给答案,而是先提供一套通用的筛选标准,再帮你…...

新手零基础入门:在快马平台上用jupyter notebook学习python数据分析
作为一个刚接触Python数据分析的小白,最近在InsCode(快马)平台上发现了一个超实用的学习方式——用Jupyter Notebook零基础入门。这个交互式工具简直是为新手量身定制的,特别适合像我这样不想折腾环境配置的人。下面分享我的学习笔记,记录如何…...

SMUDebugTool系统调试实战指南:从问题诊断到性能优化的进阶之路
SMUDebugTool系统调试实战指南:从问题诊断到性能优化的进阶之路 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项目地址: h…...

AI 赋能下新型网络钓鱼攻击演进与多维度防御技术研究
摘要 生成式人工智能的普及使网络钓鱼攻击进入智能化、隐蔽化新阶段,攻击周期大幅缩短、伪装精度显著提升,传统基于规则与特征库的防御机制失效。本文结合 ESET 安全研究与企业实测数据,剖析 AI 驱动钓鱼攻击的技术机理、混淆手段与传播路径&…...