基于知识蒸馏的两阶段去雨去雪去雾模型学习记录(三)之知识测试阶段与评估模块
去雨去雾去雪算法分为两个阶段,分别是知识收集阶段与知识测试阶段,前面我们已经学习了知识收集阶段,了解到知识阶段的特征迁移模块(CKT)与软损失(SCRLoss),那么在知识收集阶段的主要重点便是HCRLoss(硬损失),事实上,知识测试阶段要比知识收集阶段简单,因为这个模块只需要训练学生网络即可。
模型创新点
在进行知识测试阶段的代码学习之前,我们来回顾一下去雨去雪去雾网络的创新点:
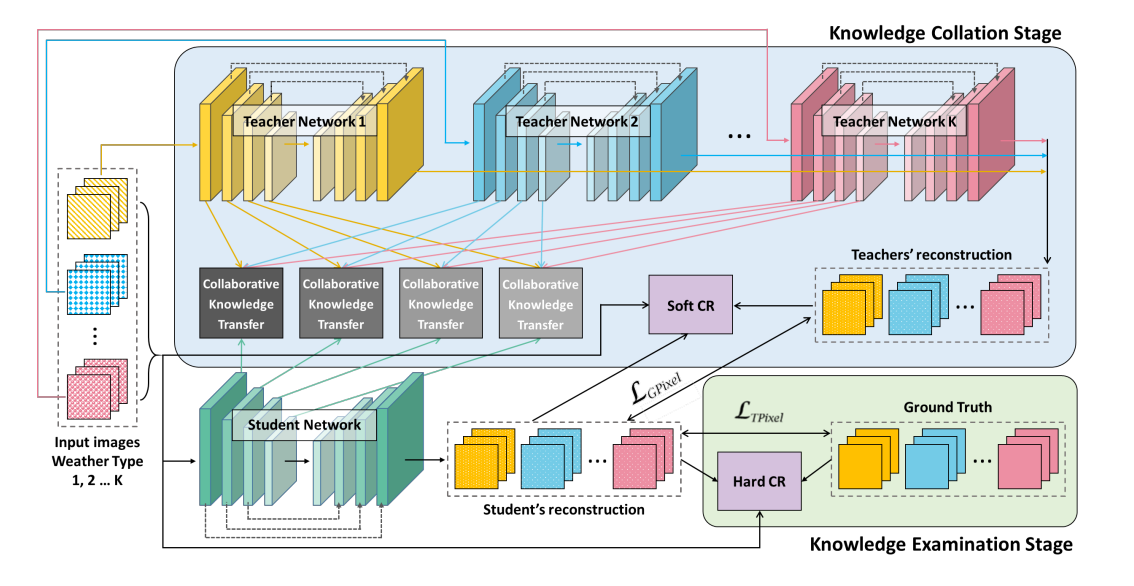
首先是提出两阶段的知识蒸馏网络,即构建三个教师网络与一个学生网络,设置总训练次数为250,其中前125个epoch教师网络与学生网络一同训练,这里的训练是指将图像输入教师网络,随后将教师网络的输出结果与中间特征图保留,将其作为真值指导学生网络进行训练。
其次便是提出知识迁移模块(CKT)该模块的作用是将教师网络的特征迁移到学生网络。
随后便是软损失与硬损失计算了,这个其实是知识蒸馏中的概念。
总体来看去雨去雾去雪网络的设计虽然较为新颖,但事实上就是知识蒸馏网络的架构,本着这一点,程序理解起来也就容易多了。
接下来开始代码的学习:
小插曲(算力不足)
首先需要指出,前面将batch-size设置为4,但却会报错:
RuntimeError: cuDNN error: CUDNN_STATUS_NOT_INITIALIZED
开始时博主以为是cuDNN与CUDA版本不匹配导致的,但后来一想不对呀,先前已经运行过呀,那么问题很可能便是batch出问题了,果然将batch改为3后就正常了,这是由于算力不足导致的,注意算力不足和显存不足还是有区别的。
将batch-size改为3后重新运行,开始知识测试阶段的探索。
知识测试阶段
事实上,知识测试阶段的实现与知识收集阶段几乎相同,并且要比知识收集阶段简单,其只是训练学生网络,并计算一个硬损失而已。
由于知识测试阶段与知识收集阶段几乎相同,因此有许多地方是重复的,这里博主便会简要介绍。
首先相同的是使用train_loader进行训练集的加载,并使用tqdm进行封装。
随后便是遍历过程,这个过程就要简单很多了,没有使用到教师网络,直接将图像输入学生网络进行预测即可,这里的学生网络与教师网络的构造是完全相同的,将结果分别计算L1损失与HCR_loss即可。不过需要注意的是由于该阶段不需要与教师网络进行特征迁移,因此就不需要返回中间特征图了,即设置return_feat=False
for target_images, input_images in pBar:if target_images is None: continuetarget_images = target_images.cuda()input_images = torch.cat(input_images).cuda()preds = model(input_images, return_feat=False)G_loss = criterion_l1(preds, target_images)HCR_loss = 0.2 * criterion_hcr(preds, target_images, input_images)total_loss = G_loss + HCR_loss
至于其他的基本就相同了,需要注意的是这里的batch设置为3。接下来记录一下数据的变化情况:
input_images:输入图像,torch.Size([3, 3, 224, 224])第一个3是指图像数量,第二个3是指通道维度
target_images:目标图像(真值),torch.Size([3, 3, 224, 224])第一个3是指图像数量,第二个3是指通道维度
preds:预测图像(去噪后的图像),torch.Size([3, 3, 224, 224])第一个3是指图像数量,第二个3是指通道维度

随后计算L1损失与HCRLoss,由于在学生网络中使用的事实上是混合数据集,即不区分去噪类型,因此输入图像等都是直接使用tesnor格式,而非list格式。
G_loss:tensor(0.5621, device='cuda:0', grad_fn=<L1LossBackward>)
HCRLoss
与SCRLoss相同,HCRLoss也是先将图像进行特征转换后再计算损失的
HCRLoss((vgg): Vgg19((slice1): Sequential((0): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))(1): ReLU(inplace=True))(slice2): Sequential((2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))(3): ReLU(inplace=True)(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)(5): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))(6): ReLU(inplace=True))(slice3): Sequential((7): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))(8): ReLU(inplace=True)(9): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)(10): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))(11): ReLU(inplace=True))(slice4): Sequential((12): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))(13): ReLU(inplace=True)(14): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))(15): ReLU(inplace=True)(16): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))(17): ReLU(inplace=True)(18): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)(19): Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))(20): ReLU(inplace=True))(slice5): Sequential((21): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))(22): ReLU(inplace=True)(23): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))(24): ReLU(inplace=True)(25): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))(26): ReLU(inplace=True)(27): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)(28): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))(29): ReLU(inplace=True)))(l1): L1Loss()
)
HCRLoss:tensor(0.3274, device='cuda:0', grad_fn=<MulBackward0>)
评估模块
至此,知识测试阶段便完成了,随后便是模型评估了。这里默认设置评估时的batch-size为1,即每次输入一张图像。
所谓的评估指的是对学生网络的评估,该模块其实与知识测试阶段类似,不同之处在于这里是需要计算SSIM与PSNR的。至于其他则是完全相同,核心代码如下:
for target, image in pBar:if torch.cuda.is_available():image = image.cuda()target = target.cuda()pred = model(image) psnr_list.append(torchPSNR(pred, target).item())ssim_list.append(pytorch_ssim.ssim(pred, target).item())
由于batch-size设置为1,因此target为torch.Size([1, 3, 480, 640]),image也为torch.Size([1, 3, 480, 640]),这里需要注意的是,在训练阶段(包含知识收集与知识测试阶段),数据集中的图像都要转换为224x224的大小,而在评估阶段则不需要进行转换了,即使用的是原图像的大小。
直接将输入图输入模型,获的去噪后的图像pred大小为torch.Size([1, 3, 480, 640])
pred = model(image)

随后将预测图像与真值图像进行计算PSNR与SSIM
psnr_list.append(torchPSNR(pred, target).item())
ssim_list.append(pytorch_ssim.ssim(pred, target).item())
PSNR计算
@torch.no_grad()
def torchPSNR(prd_img, tar_img):if not isinstance(prd_img, torch.Tensor):prd_img = torch.from_numpy(prd_img)tar_img = torch.from_numpy(tar_img)imdff = torch.clamp(prd_img, 0, 1) - torch.clamp(tar_img, 0, 1)rmse = (imdff**2).mean().sqrt()ps = 20 * torch.log10(1/rmse)return ps
SSIM计算
class SSIM(torch.nn.Module):def __init__(self, window_size = 11, size_average = True):super(SSIM, self).__init__()self.window_size = window_sizeself.size_average = size_averageself.channel = 1self.window = create_window(window_size, self.channel)def forward(self, img1, img2):(_, channel, _, _) = img1.size()if channel == self.channel and self.window.data.type() == img1.data.type():window = self.windowelse:window = create_window(self.window_size, channel) if img1.is_cuda:window = window.cuda(img1.get_device())window = window.type_as(img1) self.window = windowself.channel = channelreturn _ssim(img1, img2, window, self.window_size, channel, self.size_average)
def ssim(img1, img2, window_size = 11, size_average = True):(_, channel, _, _) = img1.size()window = create_window(window_size, channel) if img1.is_cuda:window = window.cuda(img1.get_device())window = window.type_as(img1)return _ssim(img1, img2, window, window_size, channel, size_average)
将每个循环得到的psnr与ssim加入列表
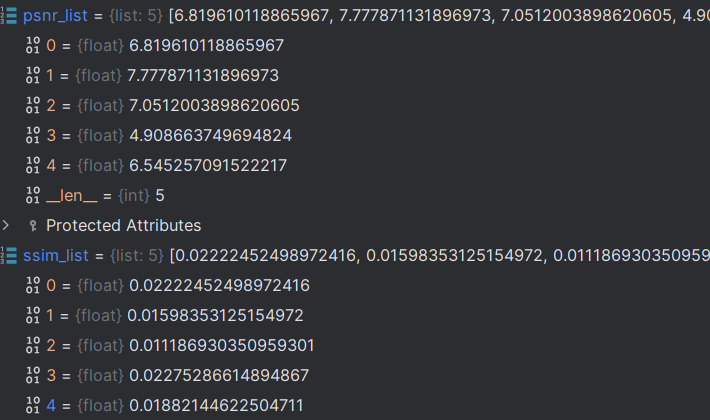
最后的PSNR与SSIM是对list中的所有值求平均:
print("PSNR: {:.3f}".format(np.mean(psnr_list)))
print("SSIM: {:.3f}".format(np.mean(ssim_list)))
至此,知识测试阶段与评估模块就讲解完成了,接下来博主将对该模型进行改进。
相关文章:
基于知识蒸馏的两阶段去雨去雪去雾模型学习记录(三)之知识测试阶段与评估模块
去雨去雾去雪算法分为两个阶段,分别是知识收集阶段与知识测试阶段,前面我们已经学习了知识收集阶段,了解到知识阶段的特征迁移模块(CKT)与软损失(SCRLoss),那么在知识收集阶段的主要重点便是HCRLoss(硬损失…...

代码随想录二刷day46
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、力扣139. 单词拆分二、力扣动态规划:关于多重背包,你该了解这些! 前言 提示:以下是本篇文章正文内容&#x…...

计算机竞赛 行人重识别(person reid) - 机器视觉 深度学习 opencv python
文章目录 0 前言1 技术背景2 技术介绍3 重识别技术实现3.1 数据集3.2 Person REID3.2.1 算法原理3.2.2 算法流程图 4 实现效果5 部分代码6 最后 0 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 深度学习行人重识别(person reid)系统 该项目…...

在线图片转BASE64、在线BASE64转图片
图片转BASE64、BASE64转图片...

什么是RPA?一文了解RPA发展与进程!
RPA(Robotic Process Automation,机器人流程自动化)是一种通过软件机器人模拟人类在计算机上执行重复性任务的技术。RPA的核心理念是将规则、过程和数据“机器人化”,从而实现对业务流程的自动化。RPA技术可以显著提高企业的工作效…...
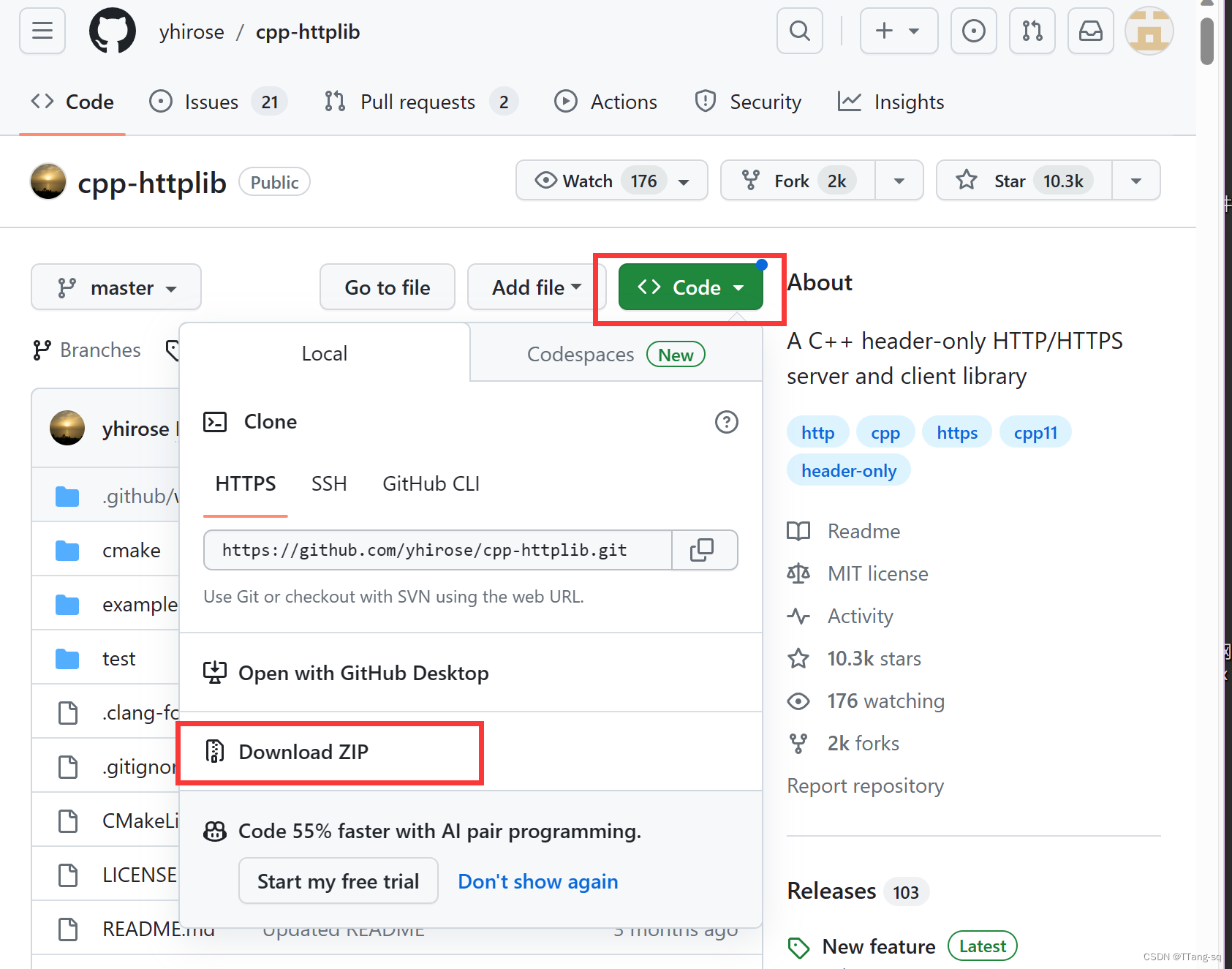
【云备份项目】【Linux】:环境搭建(g++、json库、bundle库、httplib库)
文章目录 1. g 升级到 7.3 版本2. 安装 jsoncpp 库3. 下载 bundle 数据压缩库4. 下载 httplib 库从 Win 传输文件到 Linux解压缩 1. g 升级到 7.3 版本 🔗链接跳转 2. 安装 jsoncpp 库 🔗链接跳转 3. 下载 bundle 数据压缩库 安装 git 工具 sudo yum…...

工信部教考中心:什么是《研发效能(DevOps)工程师》认证,拿到证书之后有什么作用!(下篇)丨IDCF
拿到证书有什么用? 提高职业竞争力:通过学习认证培训课程可以提升专业技能,了解项目或产品研发全生命周期的核心原则,掌握端到端的研发效能提升方法与实践,包括组织与协作、产品设计与运营、开发与交付、测试与安全、…...
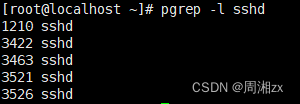
Linux进程相关管理(ps、top、kill)
目录 一、概念 二、查看进程 1、ps命令查看进程 1)ps显示某个时间点的程序运行情况 2)查看指定的进程信息 2、top命令查看进程 1)信息统计区: 2)进程信息区 3)交互式命令 三、信号控制进程 四、…...
微服务技术栈-Ribbon负载均衡和Nacos注册中心
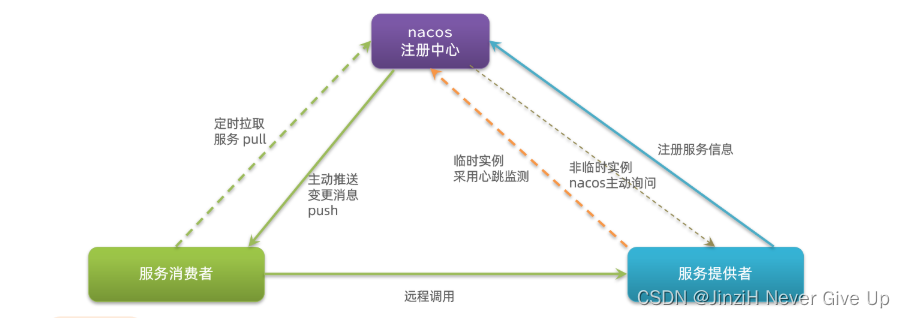
文章目录 前言一、Ribbon负载均衡1.LoadBalancerInterceptor(负载均衡拦截器)2.负载均衡策略IRule 二、Nacos注册中心1.Nacos简介2.搭建Nacos注册中心3.服务分级存储模型4.环境隔离5.Nacos与Eureka的区别 总结 前言 在上面那个文章中介绍了微服务架构的…...
知识图谱和大语言模型的共存之道
源自:开放知识图谱 “人工智能技术与咨询” 发布 导 读 01 知识图谱和大语言模型的历史 图1 图2 图3 图4 图5 02 知识图谱和大语言模型作为知识库的优缺点 图6 图7 表1 表2 图8 图9 03 知识图谱和大语言模型双知识平台融合 图10 图11 04 总结与展望 声明:公众号转…...

enum, sizeof, typedef
枚举类型enum enum 是 C 语言中的一种自定义类型enum 值是可以根据需要自定义的整型值第一个定义的 enum 值默认为 0默认情况下的 enum 值在前一个定义值得基础上加 1enum 类型的变量只能取定义时得离散值 void code() {enum Color{GREEN, // 0RED 2, // 2BLUE, …...

(二)激光线扫描-相机标定
1. 何为相机标定? 当相机拍摄照片时,我们看到的图像通常与我们实际看到的不完全相同。这是由相机镜头引起的,而且发生的频率比我们想象的要高。 这种图像的改变就是我们所说的畸变。一般来说,畸变是指直线在图像中出现弯曲或弯曲。 这种畸变我们可以通过相机标定来进行解…...

pytorch 数据载入
在PyTorch中,数据载入是训练深度学习模型的重要一环。 本文将介绍三种常用的数据载入方式:Dataset、DataLoader、以及自定义的数据加载器。 使用 Dataset 载入数据 方法: from torch.utils.data import Datasetclass CustomDataset(Dataset…...
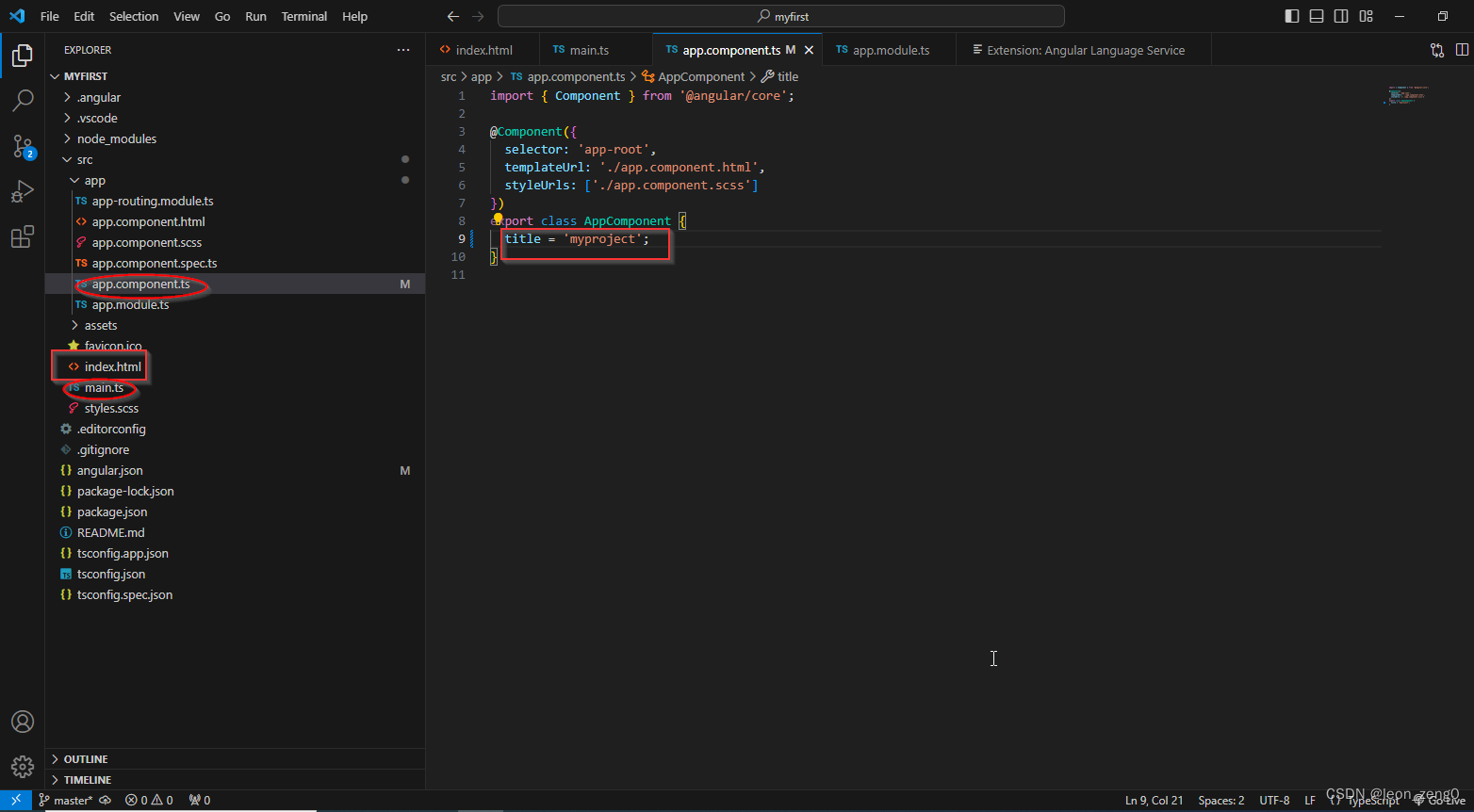
angular 在vscode 下的hello world
Angulai 是google 公司开发的前端开发框架。Angular 使用 typescript 作为编程语言。typescript 是Javascript 的一个超集,提升了某些功能。本文介绍运行我的第一个angular 程序。 前面部分参考: Angular TypeScript Tutorial in Visual Studio Code 一…...

Django、Nginx、uWSGI详解及配置示例
一、Django、Nginx、uWSGI的概念、联系与区别 Django、Nginx 和 uWSGI 都是用于构建和运行 Web 应用程序的软件,这三个软件的概念如下: Django:Django 是一个基于 Python 的开源 Web 框架,它提供了一套完整的工具和组件…...
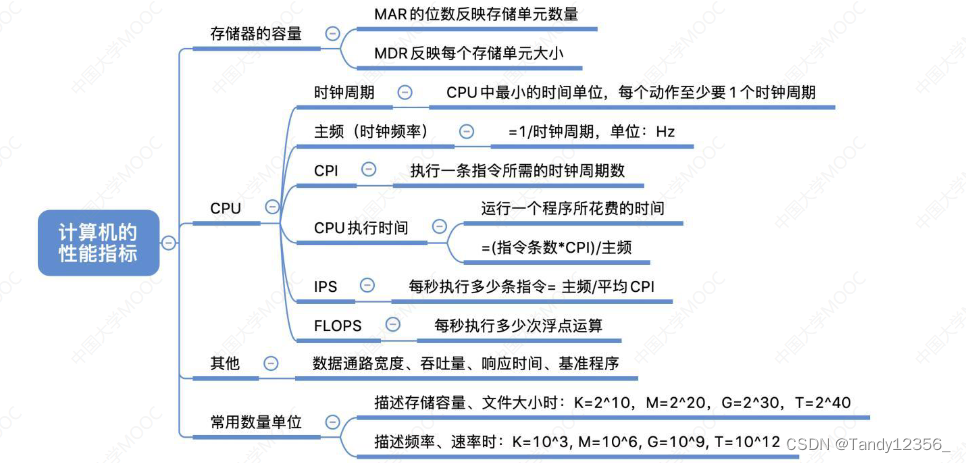
王道考研计算机组成原理——计算机硬件的基础知识
计算机组成原理的基本概念 计算机硬件的针脚都是用来传递信息,传递数据用的: 服务程序包含一些调试程序: 计算机硬件的基本组成 控制器通过电信号来协调其他部件的工作,同时负责解析存储器里存放的程序指令,然后指挥…...

[晕事]今天做了件晕事21;设置代理访问网站的时候需注意的问题
今天在家上班,设置好VPN,通过代理来访问公司内部的一个系统浏览器的反应如下: Hmmm… can’t reach this page ***.com refused to connect. 这个返回的错误,非常的具有迷惑性,提示的意思:拒绝链接…...

Go通过reflect.Value修改值
到目前为止,反射还只是程序中变量的另一种读取方式。然而,在本节中我们将重点讨论如何通过反射机制来修改变量。 回想一下,Go语言中类似x、x.f[1]和*p形式的表达式都可以表示变量,但是其它如x 1和f(2)则不是变量。一个变量就是一…...
【MySql】4- 实践篇(二)
文章目录 1. SQL 语句为什么变“慢”了1.1 什么情况会引发数据库的 flush 过程呢?1.2 四种情况性能分析1.3 InnoDB 刷脏页的控制策略 2. 数据库表的空间回收2.1 innodb_file_per_table参数2.2 数据删除流程2.3 重建表2.4 Online 和 inplace 3. count(*) 语句怎样实现…...

获取多个接口的数据并进行处理,使用Promise.all来等待所有接口请求完成
Promise.all (等待机制) 方法 它调用了多个函数,这些函数返回了Promise对象,每个Promise对象代表了一个异步操作。 然后,使用Promise.all将这多个Promise对象包装成一个新的Promise对象,它会等待所有的Promise都完成(或…...
)
汽车资讯网站|基于springboot+vue的汽车资讯网站(源码+数据库+文档)
汽车资讯网站 目录 基于springbootvue的汽车资讯网站 一、前言 二、系统设计 三、系统功能设计 四、数据库设计 五、核心代码 六、论文参考 七、最新计算机毕设选题推荐 八、源码获取: 博主介绍:✌️大厂码农|毕设布道师,阿里云开…...

企业级知识管理新门槛:NotebookLM单用户年成本超$298?我们用5类典型场景算清ROI临界点
更多请点击: https://intelliparadigm.com 第一章:企业级知识管理新门槛:NotebookLM单用户年成本超$298?我们用5类典型场景算清ROI临界点 当企业评估AI增强型知识管理工具时,隐性成本常被低估——NotebookLM虽未公开…...

ARM指令集优化:MVN、ORR与PLD指令深度解析
1. ARM指令集基础与优化技术概览在嵌入式系统和低功耗计算领域,ARM架构凭借其精简高效的指令集设计占据了主导地位。作为ARMv7/v8架构的核心组成部分,逻辑运算指令和内存预取指令对程序性能有着决定性影响。MVN(位取反)、ORR&…...

AI Agent 对比和选型
一、前言!!!Agent,把天才 AI 变成一个能干活的人 !!!如果说 LLM 大模型是一个天才引擎,那么 Agent 就是很多无形的手,去控制这个天才引擎完成各种各样的工作和流程&#…...

github拆分小批量上传文件
Windows端1.把项目重置干净Remove-Item -Recurse -Force tool/.git2.打开文件夹3.把里面所有东西 全部剪切移到桌面只留 1 个小小的文件 就行4.回到终端,依次运行git initPS D:\soft\github\tool> git init Initialized empty Git repository in D:/soft/github/…...

不只是编译:用Groops GUI玩转GNSS数据处理,从仿真轨道到结果可视化
不只是编译:用Groops GUI玩转GNSS数据处理,从仿真轨道到结果可视化 当GNSS数据处理遇上可视化交互,科研效率会发生怎样的质变?Groops作为重力场与卫星轨道分析领域的专业工具,其GUI界面将复杂的数学建模转化为直观的拖…...

在线音视频处理工具实测对比:视频压缩、格式转换、音频提取哪家强?
一、为什么要关注在线音视频工具?先看一组数据。根据多家市场研究机构的报告,全球视频处理相关市场规模近年来持续增长,视频内容的生产量每年都在翻倍。各大平台每天新增的视频播放时长以亿计——这意味着越来越多的普通用户和创作者…...
JiT源码深度剖析:从Denoiser到Transformer的完整实现
JiT源码深度剖析:从Denoiser到Transformer的完整实现 【免费下载链接】JiT PyTorch implementation of JiT https://arxiv.org/abs/2511.13720 项目地址: https://gitcode.com/gh_mirrors/jit8/JiT JiT(Just image Transformer)是一个…...

JAVA:类和对象完全解析
一、编程世界的乐高积木在面向对象编程(OOP)的宇宙中,类(Class)和对象(Object)如同乐高积木的基础模块。如果把程序看作一个虚拟城市,类就是建筑设计图,而对象则是根据图…...

博彩业税收支持STEM教育的风险与可持续筹资方案探讨
1. 项目概述:当教育经费与博彩业挂钩作为一名长期关注科技教育领域发展的从业者,我时常需要追踪全球范围内STEM(科学、技术、工程和数学)教育的政策与资金动向。最近在梳理历史资料时,一篇2012年的旧文再次引起了我的注…...