加速attention计算的工业标准:flash attention 1和2算法的原理及实现
transformers目前大火,但是对于长序列来说,计算很慢,而且很耗费显存。对于transformer中的self attention计算来说,在时间复杂度上,对于每个位置,模型需要计算它与所有其他位置的相关性,这样的计算次数会随着序列长度的增加而呈二次增长。在空间复杂度上,self attention需要存储一个矩阵来保存所有位置的相关性分数,这个矩阵的大小也会随着序列长度的增加而呈二次增长。因此,对于非常长的序列,这种二次复杂度会导致计算和内存消耗急剧增加,使得模型在处理这样的输入时会变得相对缓慢且需要大量内存。这也是为什么对于超长序列,可能需要采取一些策略,如切分成短序列进行处理,或者使用其他模型架构来替代传统的Transformer模型。
在pytorch、huggingface transformers library、微软的DeepSpeed、nvidia的Megatron-LM、Mosaic ML的Composer library、GPT-Neox、paddlepaddle中,都已经集成了flash attention。在MLPerf 2.1的open division中,在train BERT的任务上,flash attention也实现了2.7x的速度提升。
flash attention 1
flash attention 1从attention计算的GPU memory的read和write方面入手来提高attention计算的效率。其主要思想是通过切块(tiling)技术,来减少GPU HBM和GPU SRAM之间的数据读写操作。通过切块,flash attention1实现了在BERT-large(seq. length 512)上端到端15%的提速,在GPT-2(seq. length 1k)上3x的提速。具体数据可看flash attention 1的paper。
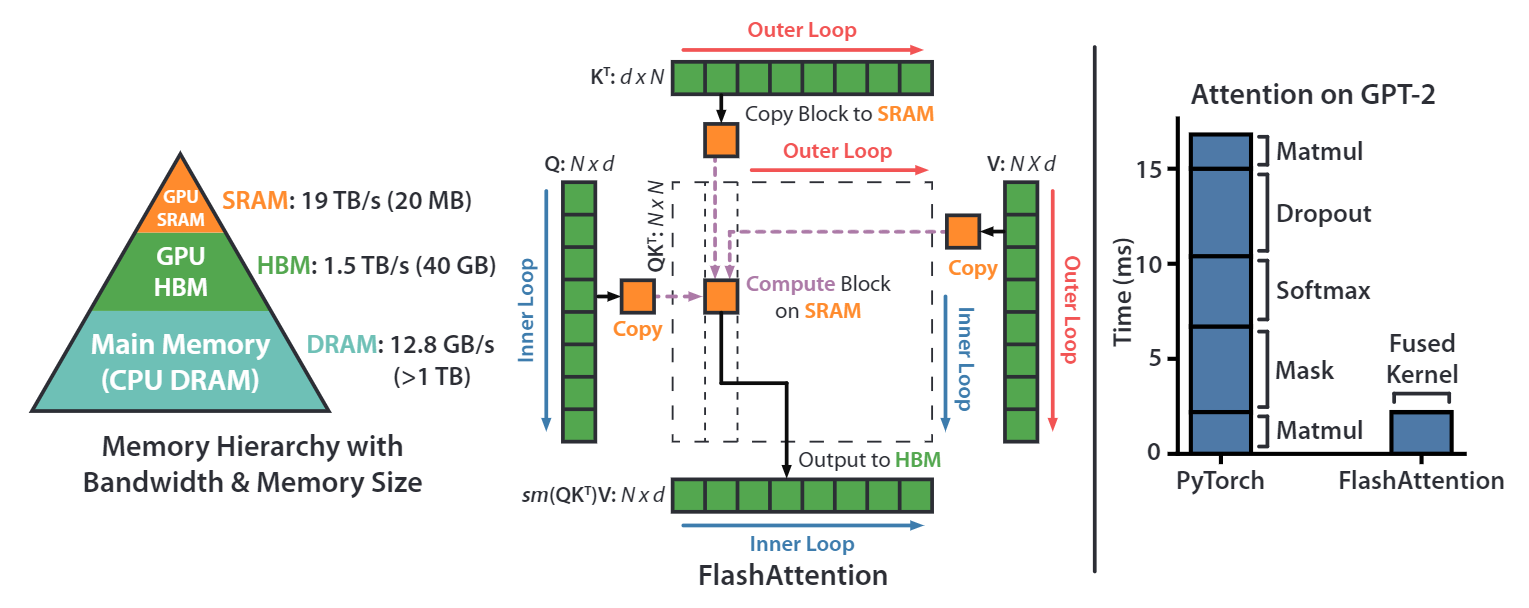
首先我们看一下NVIDIA GPU的显存架构,上图左图是以NVIDIA A100 40G显卡为例,我们常说的40G显存是其HBM memory(high bandwidth memory),其带宽是1.5~2.0TB/s,A100上还有一块192KB每108 SM (streaming multiprocessors) 的on-chip SRAM memory,其带宽是19TB/s。因此,如果能把涉及到显存的读写操作放在SRAM上,那将会极大的提升速度。
上图中间部分的图描述的就是flash attention 1算法的原理。对于常规的attention计算来说,首先会把Q、K和V完整的读进HBM中,然后执行计算。flash attention 1通过将Q、K和V切块成很多小块,然后将这些小块的Q、K和V放进SRAM中执行计算,最后再写回HBM中。
上图最右侧图片展示的是通过一些算子融合技术以及flash attention 1的IO优化技术,再GPT-2的计算上,flash attention IO优化+算子融合,相比pytorch的实现,有大约7.6x的性能提升。

上图的算法流程是标准的attention计算的实现。首先从HBM中加载 Q , K Q,K Q,K矩阵,然后执行 S = Q K T S=QK^T S=QKT的计算,将结果 S S S写回HBM;然后将 S S S再从HBM中读取出来,执行 P = s o f t m a x ( S ) P=softmax(S) P=softmax(S)的计算,再将 P P P写回HBM;然后将 P P P和 V V V从HBM中读取出来,执行 O = P V O=PV O=PV的计算,最后把结果写回HBM中。
这个过程中,有多次与HBM的IO操作,速度相对较慢。

上图算法流程是flash attention1的forward实现。我们逐步的看一下计算过程。
- 首先根据SRAM的大小,计算出合适的分块block大小;
- 将 O , l , m O,l,m O,l,m在HBM中初始化为对应shape的全0的矩阵或向量, l , m l,m l,m的具体作用后面算法流程会说明;
- 将 Q , K , V Q,K,V Q,K,V按照分块block的大小切分成许多个blocks;
- 将 O , l , m O,l,m O,l,m也切分成对应数量的blocks;
- 执行outer loop,在outer loop中,做的IO操作是将分块的 K j , V j K_j,V_j Kj,Vj从HBM中加载到SRAM中;
- 执行inner loop,将 Q i , O i , l i , m i Q_i,O_i,l_i,m_i Qi,Oi,li,mi从HBM中load到SRAM中,然后分块计算上面流程的中间值,在每个inner loop里面,都将 O i , l i , m i O_i,l_i,m_i Oi,li,mi写回到HBM中,因此与HBM的IO操作还是相对较多的。
由于我们将 Q , K , V Q,K,V Q,K,V都进行了分块计算,而 s o f t m a x softmax softmax却是针对整个vector执行计算的,因此在上图flash attention的计算流程的第10、11、12步中,其使用了safe online softmax技术。
y = s o f t m a x ( x ) y=softmax(x) y=softmax(x)的定义为
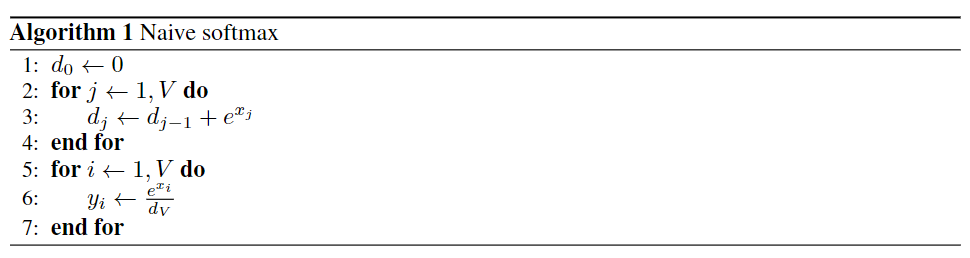
上图是naive softmax的实现过程,首先需要迭代计算分母的和,然后再迭代计算vector中每一个值对应的softmax值。这个过程需要两次从内存读取和一次写回内存操作。
但是naive softmax在实际的硬件上计算是有问题的,在naive softmax的实现过程的第3步,由于有指数操作,会有数值溢出的情况,因此在实际使用时,softmax都是使用safe softmax算法
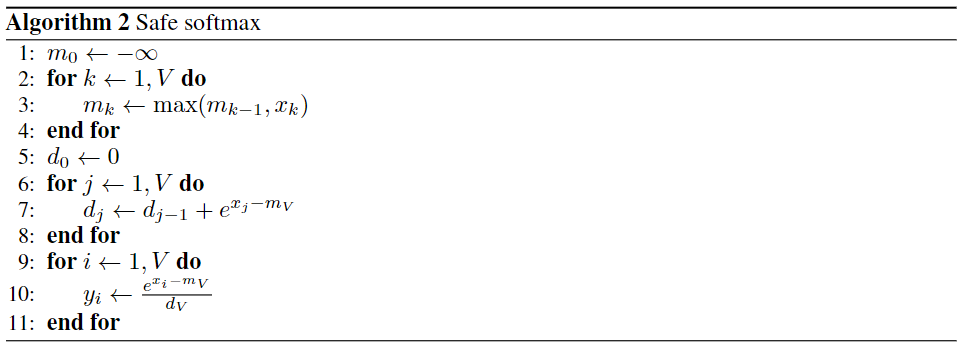
上图是safe softmax的计算过程,其主要修改是在指数部分,减去了要计算vector的最大值,保证了指数部分的最大值是0,避免了数值溢出。在几乎所有的深度学习框架中,都是使用safe softmax来执行softmax算法的。但是safe softmax相比naive softmax,多了一次数据的读取过程,总共是从内存中有三次读取,一次写入操作。
但是不管是naive softmax还是safe softmax,都需要传入一整个vector进行计算,但是flash attention 1算法执行了分块(tiling)策略,导致不能一次得到整个vector,因此需要使用online safe softmax算法。
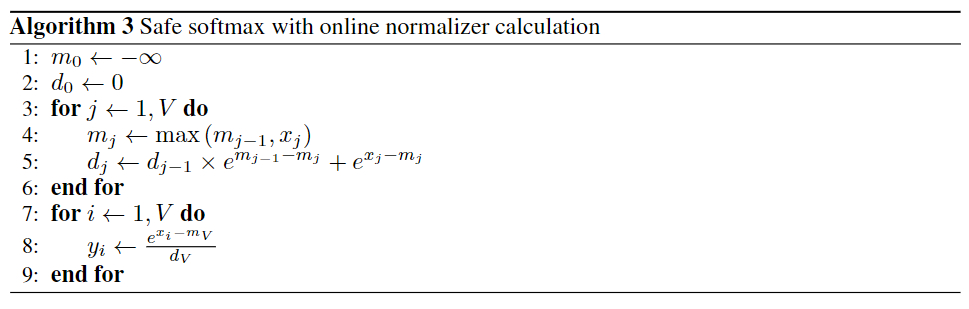
上面的算法流程是online safe softmax的计算过程。在safe softmax中,vector的最大值 m m m的计算是在一个单独的for循环中,在online safe softmax中, m m m的计算是迭代进行的,因此得到的 m m m不是一个vector中最大的值,而是迭代过程中的局部极大值,相应的对softmax的分母 d d d的计算也要加一个补偿项 e m j − 1 − m j e^{m_{j-1}-m_j} emj−1−mj。
这样得出的结果与直接使用safe softmax是一致的,具体的证明过程可以参考论文Online normalizer calculation for softmax。在flash attention 1的算法中,其也使用了online safe softmax,并对其算法进行了相应的扩展。
我们用一个简单的例子看一下safe softmax与pytorch标准的softmax的计算结果。online safe softmax在后面的flash attention的实现中会有体现。
import torchtorch.manual_seed(456)N, d = 16, 8Q_mat = torch.rand((N, d))
K_mat = torch.rand((N, d))
V_mat = torch.rand((N, d))# 执行标准的pytorch softmax和attention计算
expected_softmax = torch.softmax(Q_mat @ K_mat.T, dim=1)
expected_attention = expected_softmax @ V_mat## 执行safe softmax和attention计算
# 1st read
S_mat = Q_mat @ K_mat.T
row_max = torch.max(S_mat, dim=1).values[:, None]
# 2nd read
input_safe = S_mat - row_max
softmax_numerator = torch.exp(input_safe)
# 3rd read
softmax_denominator = torch.sum(softmax_numerator, dim=1)[:, None]
# 4th read
safe_softmax = softmax_numerator / softmax_denominator
# final matmul (another read / write)
matmul_result = safe_softmax @ V_matassert torch.allclose(safe_softmax, expected_softmax)
assert torch.allclose(matmul_result, expected_attention)
经过代码最终的assert,safe_softmax与pytorch标准的softmax的计算结果是一致的。
下面我们用python代码实现flash attention 1的forward算法流程:
import torchtorch.manual_seed(456)N, d = 16, 8Q_mat = torch.rand((N, d))
K_mat = torch.rand((N, d))
V_mat = torch.rand((N, d))# 执行标准的pytorch softmax和attention计算
expected_softmax = torch.softmax(Q_mat @ K_mat.T, dim=1)
expected_attention = expected_softmax @ V_mat# 分块(tiling)尺寸,以SRAM的大小计算得到
Br = 4
Bc = d# flash attention算法流程的第2步,首先在HBM中创建用于存储输出结果的O,全部初始化为0
O = torch.zeros((N, d))
# flash attention算法流程的第2步,用来存储softmax的分母值,在HBM中创建
l = torch.zeros((N, 1))
# flash attention算法流程的第2步,用来存储每个block的最大值,在HBM中创建
m = torch.full((N, 1), -torch.inf)# 算法流程的第5步,执行外循环
for block_start_Bc in range(0, N, Bc):block_end_Bc = block_start_Bc + Bc# line 6, load a block from matmul input tensor# 算法流程第6步,从HBM中load Kj, Vj的一个block到SRAMKj = K_mat[block_start_Bc:block_end_Bc, :] # shape Bc x dVj = V_mat[block_start_Bc:block_end_Bc, :] # shape Bc x d# 算法流程第7步,执行内循环for block_start_Br in range(0, N, Br):block_end_Br = block_start_Br + Br# 算法流程第8行,从HBM中分别load以下几项到SRAM中mi = m[block_start_Br:block_end_Br, :] # shape Br x 1li = l[block_start_Br:block_end_Br, :] # shape Br x 1Oi = O[block_start_Br:block_end_Br, :] # shape Br x dQi = Q_mat[block_start_Br:block_end_Br, :] # shape Br x d# 算法流程第9行Sij = Qi @ Kj.T # shape Br x Bc# 算法流程第10行,计算当前block每行的最大值mij_hat = torch.max(Sij, dim=1).values[:, None]# 算法流程第10行,计算softmax的分母pij_hat = torch.exp(Sij - mij_hat)lij_hat = torch.sum(pij_hat, dim=1)[:, None]# 算法流程第11行,找到当前block的每行最大值以及之前的最大值mi_new = torch.max(torch.column_stack([mi, mij_hat]), dim=1).values[:, None]# 算法流程第11行,计算softmax的分母,但是带了online计算的校正,此公式与前面说的online safe softmax不一致,但是是同样的数学表达式,只是从针对标量的逐个计算扩展到了针对逐个向量的计算li_new = torch.exp(mi - mi_new) * li + torch.exp(mij_hat - mi_new) * lij_hat# 算法流程第12行,计算每个block的输出值Oi = (li * torch.exp(mi - mi_new) * Oi / li_new) + (torch.exp(mij_hat - mi_new) * pij_hat / li_new) @ Vj# 算法流程第13行m[block_start_Br:block_end_Br, :] = mi_new # row maxl[block_start_Br:block_end_Br, :] = li_new # softmax denominator# 算法流程第12行,将Oi再写回到HBMO[block_start_Br:block_end_Br, :] = Oiassert torch.allclose(O, expected_attention)
运行代码,经过最后的assert操作,没有raise错误,说明通过flash attention计算的O值与pytorch标准的O值是一致的。
flash attention2
flash attention1已经实现了较为显著的性能提升,但是也仅达到了25%~40%的GEMM(General Matrix Multiply)的理论最大FLOPs/s。flash attention的作者通过分析,发现是由于在GPU的不同线程块和warps上的任务切分还不够优化,造成了一些低利用率或者不必要的共享内存的读写操作。进而作者又提出了flash attention2算法,对任务的切分进行了优化,具体来说主要有:(1)调整算法,减少了非矩阵乘法的FLOPs。在深度学习中,通常会使用矩阵乘法运算来进行前向传播和反向传播。这是因为矩阵乘法是一种高效的数值运算,可以在现代硬件上被高效地实现。然而,并不是所有的运算都可以被表示成矩阵乘法的形式。有些运算可能需要使用其他的数值计算方法,这些方法可能会涉及到更多的浮点运算。(2)更大程度的提高了attention计算的并行度,甚至对于单个头的计算,也会将其分发到多个不同的线程块中执行计算,此举相比flash attention1,大约有2x的性能提升。
关于flash attention2对GPU warps的优化调整,flash attention2的论文中有一处说明,如下图所示。
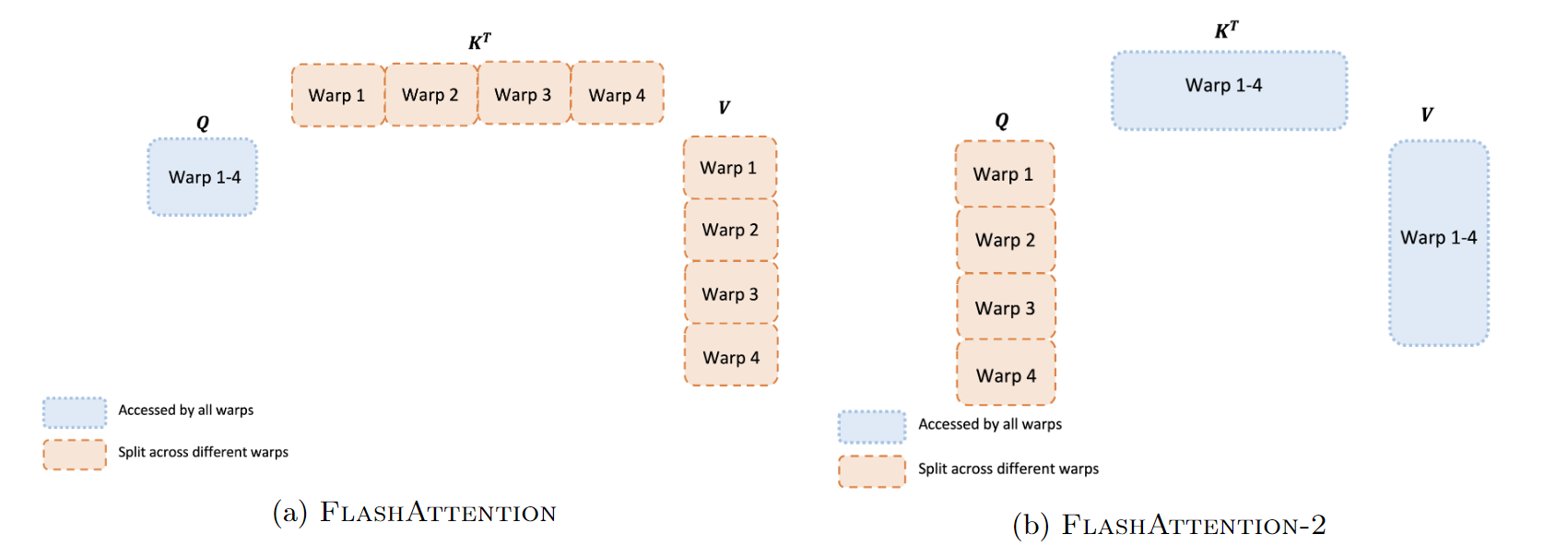
flash attention1的forward计算中,对于每一个block,是将 K , V K,V K,V切分到4个不同的warps(warps 是NVIDIA GPU并行计算的基本单元。一个Warp通常包含32个线程,它们同时执行相同的指令,但对不同的数据进行操作。在GPU执行指令时,通常以Warps为单位进行调度,这可以充分利用GPU的并行处理能力)上,但是将 Q Q Q保持为对所有的warps是可见的。关于这样修改为什么会减少shared memory的读写以提高性能,paper的原文是这么说的:
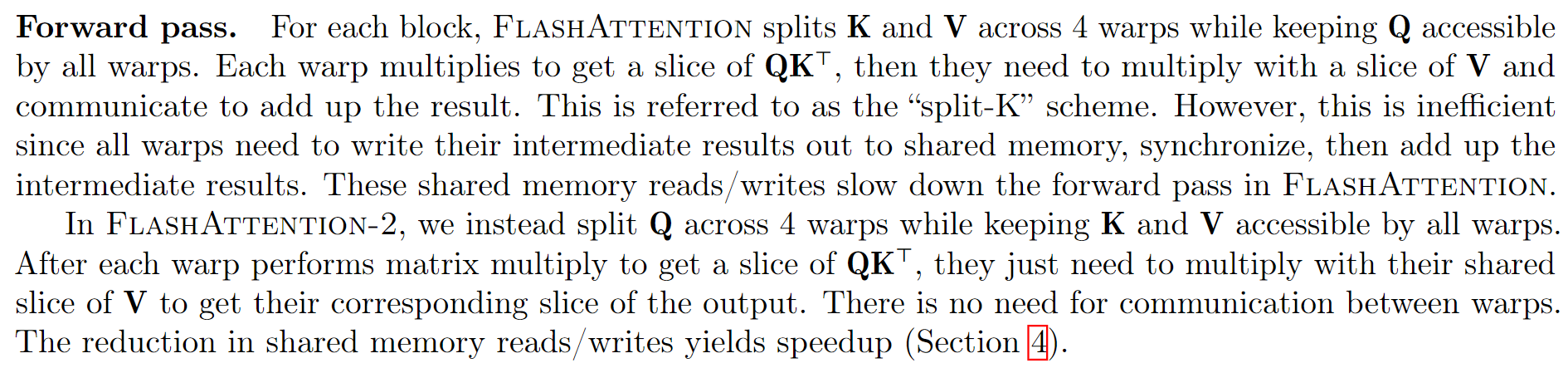
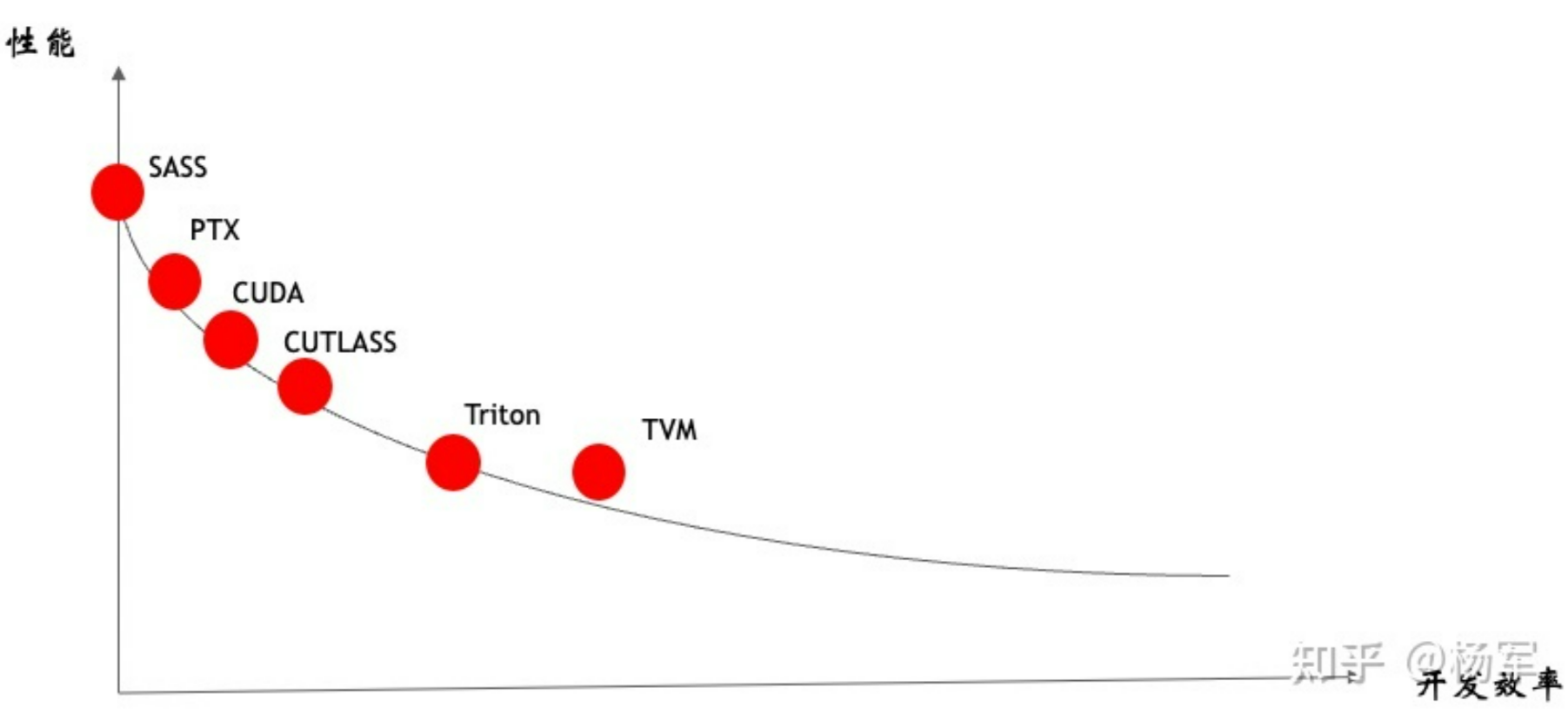
在这里我就不做过多的解释(因为我也不懂,涉及到GPU更底层的实现相关。flash attention是使用cutlass实现的,cutlass相对偏底层,从下图可以看出,cutlass比直接写CUDA会更高级一些,但是相比triton,是偏底层)。
下面我们重点放在flash attention2算法的forward计算的实现上。
flash attention2算法的计算流程如下图所示:

flash attention2与flash attention1在算法层面大部分都是相同的,只是少部分地方做了修改,因此我们不做过多的解释,直接通过代码来逐行编程实现。
import torchtorch.manual_seed(456)N, d = 16, 8
Q_mat = torch.rand((N, d))
K_mat = torch.rand((N, d))
V_mat = torch.rand((N, d))expected_softmax = torch.softmax(Q_mat @ K_mat.T, dim=1)
expected_attention = expected_softmax @ V_mat# 分块(tiling)尺寸,以SRAM的大小计算得到
Br = 4
Bc = dO = torch.zeros((N, d))# 算法流程第3步,执行外循环
for block_start_Br in range(0, N, Br):block_end_Br = block_start_Br + Br# 算法流程第4步,从HBM中load Qi 的一个block到SRAMQi = Q_mat[block_start_Br:block_end_Br, :]# 算法流程第5步,初始化每个block的值Oi = torch.zeros((Br, d)) # shape Br x dli = torch.zeros((Br, 1)) # shape Br x 1mi = torch.full((Br, 1), -torch.inf) # shape Br x 1# 算法流程第6步,执行内循环for block_start_Bc in range(0, N, Bc):block_end_Bc = block_start_Bc + Bc# 算法流程第7步,load Kj, Vj到SRAMKj = K_mat[block_start_Bc:block_end_Bc, :]Vj = V_mat[block_start_Bc:block_end_Bc, :]# 算法流程第8步Sij = Qi @ Kj.T# 算法流程第9步mi_new = torch.max(torch.column_stack([mi, torch.max(Sij, dim=1).values[:, None]]), dim=1).values[:, None]Pij_hat = torch.exp(Sij - mi_new)li = torch.exp(mi - mi_new) * li + torch.sum(Pij_hat, dim=1)[:, None]# 算法流程第10步Oi = Oi * torch.exp(mi - mi_new) + Pij_hat @ Vjmi = mi_new# 第12步Oi = Oi / li# 第14步O[block_start_Br:block_end_Br, :] = Oi
assert torch.allclose(O, expected_attention)
上面的实现只是将算法的计算流程进行了编程实现。但是在实际使用中,会结合GPU的能力进行大规模并行计算。目前大众开发者GPU的编程主要会使用CUDA和triton两种语言。cuda语言大家比较熟悉,triton在这里略作介绍。
triton是一种类似 Python 的开源编程语言,它能让没有 CUDA 经验的研究人员编写高效的 GPU 代码–在大多数情况下与专家编写的cuda代码不相上下。即我们使用 python语言和triton的接口编写完相关计算后,triton编译器会生成高效的cuda代码。triton是openai发布的一项技术,目前国内很多公司也在使用triton生成的cuda代码作为参考。具体的benchmark等信息可以参考openai triton。
下面是flash attention2的triton代码实现。
"""
Fused Attention
===============This is a Triton implementation of the Flash Attention v2 algorithm from Tri Dao (https://tridao.me/publications/flash2/flash2.pdf)
Credits: OpenAI kernel teamExtra Credits:
- Original flash attention paper (https://arxiv.org/abs/2205.14135)
- Rabe and Staats (https://arxiv.org/pdf/2112.05682v2.pdf)"""import pytest
import torchimport triton
import triton.language as tl@triton.jit
def _attn_fwd_inner(acc, l_i, m_i, q,K_block_ptr, V_block_ptr,start_m, qk_scale,BLOCK_M: tl.constexpr,BLOCK_DMODEL: tl.constexpr,BLOCK_N: tl.constexpr,STAGE: tl.constexpr,offs_m: tl.constexpr,offs_n: tl.constexpr,
):# range of values handled by this stageif STAGE == 1:lo, hi = 0, start_m * BLOCK_Melse:lo, hi = start_m * BLOCK_M, (start_m + 1) * BLOCK_Mlo = tl.multiple_of(lo, BLOCK_M)K_block_ptr = tl.advance(K_block_ptr, (0, lo))V_block_ptr = tl.advance(V_block_ptr, (lo, 0))# loop over k, v and update accumulatorfor start_n in range(lo, hi, BLOCK_N):start_n = tl.multiple_of(start_n, BLOCK_N)# -- compute qk ----k = tl.load(K_block_ptr)qk = tl.zeros([BLOCK_M, BLOCK_N], dtype=tl.float32)qk += tl.dot(q, k)if STAGE == 2:mask = offs_m[:, None] >= (start_n + offs_n[None, :])qk = qk * qk_scale + tl.where(mask, 0, -1.0e6)m_ij = tl.maximum(m_i, tl.max(qk, 1))qk -= m_ij[:, None]else:m_ij = tl.maximum(m_i, tl.max(qk, 1) * qk_scale)qk = qk * qk_scale - m_ij[:, None]p = tl.math.exp2(qk)l_ij = tl.sum(p, 1)# -- update m_i and l_ialpha = tl.math.exp2(m_i - m_ij)l_i = l_i * alpha + l_ij# -- update output accumulator --acc = acc * alpha[:, None]# update accv = tl.load(V_block_ptr)acc += tl.dot(p.to(tl.float16), v)# update m_i and l_im_i = m_ijV_block_ptr = tl.advance(V_block_ptr, (BLOCK_N, 0))K_block_ptr = tl.advance(K_block_ptr, (0, BLOCK_N))return acc, l_i, m_i@triton.jit
def _attn_fwd(Q, K, V, sm_scale, M, Out,stride_qz, stride_qh, stride_qm, stride_qk,stride_kz, stride_kh, stride_kn, stride_kk,stride_vz, stride_vh, stride_vk, stride_vn,stride_oz, stride_oh, stride_om, stride_on,Z, H,N_CTX: tl.constexpr,BLOCK_M: tl.constexpr,BLOCK_DMODEL: tl.constexpr,BLOCK_N: tl.constexpr,STAGE: tl.constexpr,
):start_m = tl.program_id(0)off_hz = tl.program_id(1)off_z = off_hz // Hoff_h = off_hz % Hqvk_offset = off_z.to(tl.int64) * stride_qz + off_h.to(tl.int64) * stride_qh# block pointersQ_block_ptr = tl.make_block_ptr(base=Q + qvk_offset,shape=(N_CTX, BLOCK_DMODEL),strides=(stride_qm, stride_qk),offsets=(start_m * BLOCK_M, 0),block_shape=(BLOCK_M, BLOCK_DMODEL),order=(1, 0),)V_block_ptr = tl.make_block_ptr(base=V + qvk_offset,shape=(N_CTX, BLOCK_DMODEL),strides=(stride_vk, stride_vn),offsets=(0, 0),block_shape=(BLOCK_N, BLOCK_DMODEL),order=(1, 0),)K_block_ptr = tl.make_block_ptr(base=K + qvk_offset,shape=(BLOCK_DMODEL, N_CTX),strides=(stride_kk, stride_kn),offsets=(0, 0),block_shape=(BLOCK_DMODEL, BLOCK_N),order=(0, 1),)O_block_ptr = tl.make_block_ptr(base=Out + qvk_offset,shape=(N_CTX, BLOCK_DMODEL),strides=(stride_om, stride_on),offsets=(start_m * BLOCK_M, 0),block_shape=(BLOCK_M, BLOCK_DMODEL),order=(1, 0),)# initialize offsetsoffs_m = start_m * BLOCK_M + tl.arange(0, BLOCK_M)offs_n = tl.arange(0, BLOCK_N)# initialize pointer to m and lm_i = tl.zeros([BLOCK_M], dtype=tl.float32) - float("inf")l_i = tl.zeros([BLOCK_M], dtype=tl.float32) + 1.0acc = tl.zeros([BLOCK_M, BLOCK_DMODEL], dtype=tl.float32)# load scalesqk_scale = sm_scaleqk_scale *= 1.44269504 # 1/log(2)# load q: it will stay in SRAM throughoutq = tl.load(Q_block_ptr)# stage 1: off-bandif STAGE & 1:acc, l_i, m_i = _attn_fwd_inner(acc, l_i, m_i, q, K_block_ptr, V_block_ptr,start_m, qk_scale,BLOCK_M, BLOCK_DMODEL, BLOCK_N,1, offs_m, offs_n,)# barrier makes it easier for compielr to schedule the# two loops independentlytl.debug_barrier()# stage 2: on-bandif STAGE & 2:acc, l_i, m_i = _attn_fwd_inner(acc, l_i, m_i, q, K_block_ptr, V_block_ptr,start_m, qk_scale,BLOCK_M, BLOCK_DMODEL, BLOCK_N,2, offs_m, offs_n,)# epiloguem_i += tl.math.log2(l_i)acc = acc / l_i[:, None]m_ptrs = M + off_hz * N_CTX + offs_mtl.store(m_ptrs, m_i)tl.store(O_block_ptr, acc.to(Out.type.element_ty))empty = torch.empty(128, device="cuda")class _attention(torch.autograd.Function):@staticmethoddef forward(ctx, q, k, v, causal, sm_scale):# shape constraintsLq, Lk, Lv = q.shape[-1], k.shape[-1], v.shape[-1]assert Lq == Lk and Lk == Lvassert Lk in {16, 32, 64, 128}o = torch.empty_like(q)BLOCK_M = 128BLOCK_N = 64 if Lk <= 64 else 32num_stages = 4 if Lk <= 64 else 3num_warps = 4# Tuning for H100if torch.cuda.get_device_capability()[0] == 9:num_warps = 8num_stages = 7 if Lk >= 64 else 3grid = (triton.cdiv(q.shape[2], BLOCK_M), q.shape[0] * q.shape[1], 1)M = torch.empty((q.shape[0], q.shape[1], q.shape[2]), device=q.device, dtype=torch.float32)_attn_fwd[grid](q, k, v, sm_scale, M, o,q.stride(0), q.stride(1), q.stride(2), q.stride(3),k.stride(0), k.stride(1), k.stride(2), k.stride(3),v.stride(0), v.stride(1), v.stride(2), v.stride(3),o.stride(0), o.stride(1), o.stride(2), o.stride(3),q.shape[0], q.shape[1],N_CTX=q.shape[2],BLOCK_M=BLOCK_M,BLOCK_N=BLOCK_N,BLOCK_DMODEL=Lk,STAGE=3,num_warps=num_warps,num_stages=num_stages,)ctx.save_for_backward(q, k, v, o, M)ctx.grid = gridctx.sm_scale = sm_scalectx.BLOCK_DMODEL = Lkctx.causal = causalreturn oattention = _attention.apply
我们看上面代码的这部分
p = tl.math.exp2(qk)
l_ij = tl.sum(p, 1)
# -- update m_i and l_i
alpha = tl.math.exp2(m_i - m_ij)
l_i = l_i * alpha + l_ij
# -- update output accumulator --
acc = acc * alpha[:, None]
# update acc
v = tl.load(V_block_ptr)
acc += tl.dot(p.to(tl.float16), v)
# update m_i and l_i
m_i = m_ij
就是算法流程图的按步计算,与我们用纯python实现的过程基本一致。我在实现python版的时,也借鉴了triton版本的相关计算过程。因此也可以发现,triton可以让我们用相对抽象的语言写出高性能cuda代码。下面我们会对triton的实现进行性能benchmark。
然后我们将cutlass实现的flash attention2(flash attention2的默认实现方式)与triton实现的flash attention2进行性能对比。
try:# flash attention的标准使用接口from flash_attn.flash_attn_interface import \flash_attn_qkvpacked_func as flash_attn_funcHAS_FLASH = True
except BaseException:HAS_FLASH = FalseBATCH, N_HEADS, N_CTX, D_HEAD = 4, 48, 4096, 64
# vary seq length for fixed head and batch=4
configs = [triton.testing.Benchmark(x_names=["N_CTX"],x_vals=[2**i for i in range(10, 15)],line_arg="provider",line_vals=["triton"] + (["flash"] if HAS_FLASH else []),line_names=["Triton"] + (["Flash-2"] if HAS_FLASH else []),styles=[("red", "-"), ("blue", "-")],ylabel="ms",plot_name=f"fused-attention-batch{BATCH}-head{N_HEADS}-d{D_HEAD}-{mode}",args={"H": N_HEADS,"BATCH": BATCH,"D_HEAD": D_HEAD,"dtype": torch.float16,"mode": mode,"causal": causal,},)for mode in ["fwd"]for causal in [True]
]@triton.testing.perf_report(configs)
def bench_flash_attention(BATCH, H, N_CTX, D_HEAD, causal, mode, provider, dtype=torch.float16, device="cuda"
):assert mode in ["fwd"]warmup = 25rep = 100if provider == "triton":q = torch.randn((BATCH, H, N_CTX, D_HEAD), dtype=dtype, device="cuda", requires_grad=True)k = torch.randn((BATCH, H, N_CTX, D_HEAD), dtype=dtype, device="cuda", requires_grad=True)if mode == "fwd":q = q.to(torch.float8_e5m2)k = k.to(torch.float8_e5m2)v = torch.randn((BATCH, H, N_CTX, D_HEAD), dtype=dtype, device="cuda", requires_grad=True)sm_scale = 1.3fn = lambda: attention(q, k, v, causal, sm_scale)if mode == "bwd":o = fn()do = torch.randn_like(o)fn = lambda: o.backward(do, retain_graph=True)ms = triton.testing.do_bench(fn, warmup=warmup, rep=rep)if provider == "flash":qkv = torch.randn((BATCH, N_CTX, 3, H, D_HEAD), dtype=dtype, device=device, requires_grad=True)fn = lambda: flash_attn_func(qkv, causal=causal)if mode == "bwd":o = fn()do = torch.randn_like(o)fn = lambda: o.backward(do, retain_graph=True)ms = triton.testing.do_bench(fn, warmup=warmup, rep=rep)flops_per_matmul = 2.0 * BATCH * H * N_CTX * N_CTX * D_HEADtotal_flops = 2 * flops_per_matmulif causal:total_flops *= 0.5if mode == "bwd":total_flops *= 2.5 # 2.0(bwd) + 0.5(recompute)return total_flops / ms * 1e-9# only works on post-Ampere GPUs right now
bench_flash_attention.run(save_path=".", print_data=True)在A100上测试,结果如下:
batch4-head48-d64 forward,单位FLOPs/s
| N_CTX(context length) | triton | flash attention2(cutlass) |
|---|---|---|
| 1024 | 123 | 137 |
| 2048 | 159 | 162 |
| 4096 | 163 | 159 |
| 8192 | 167 | 157 |
| 16384 | 167 | 165 |
从前向计算的结果来看,triton的性能在context length较长的情况下,甚至好于cutlass实现的flash attention2。
但是triton实现的flash attention2相比默认使用cutlass实现的,backward计算时,triton的性能大约是cutlass的3/4。后续有机会会补充backward的实现。
相关文章:
加速attention计算的工业标准:flash attention 1和2算法的原理及实现
transformers目前大火,但是对于长序列来说,计算很慢,而且很耗费显存。对于transformer中的self attention计算来说,在时间复杂度上,对于每个位置,模型需要计算它与所有其他位置的相关性,这样的计…...

小程序获取用户手机号
在小程序中获取用户手机号需要以下步骤: 首先需要授权用户手机号,即在小程序中调用 wx.login() 方法获取用户的登录凭证,在回调函数中调用 wx.getUserInfo() 方法获取用户的个人信息,并且设置 withCredentials 参数为 true。 在获…...

Zama的fhEVM:基于全同态加密实现的隐私智能合约
1. 引言 Zama的fhEVM定位为: 基于全同态加密实现的隐私智能合约 解决方案 开源代码见: https://github.com/zama-ai/fhevm(TypeScript Solidity) Zama的fhEVM协议中主要包含: https://github.com/zama-ai/tfhe-…...

Mac M1安装ROS1或ROS2
1.首先进入Anaconda官网,安装Anaconda 2.创建、激活并配置环境 #创建环境 conda create -n ROS #激活环境 conda activate ROS #配置环境 conda config --add channels conda-forge conda config --add channels robostack conda config --set channel_priority st…...

[NISACTF 2022]popchains - 反序列化+伪协议
[NISACTF 2022]popchains 一、解题流程二、小小疑惑 一、解题流程 1、链条:Road_is_Long(construct->wakeup【page$r】-> toString【string$m】)-> Make_a_Change(construct->get【effort$t】)-> Try_W…...

分贝定义简介
一、什么是分贝 辅助单元Bel表示任何给定部件、电路或系统的输入和输出之间的对数比L,并且可以用电压、电流或功率来表示: 如果使用场量(电压或电流)代替功率量,则: 我们可以将增益或损耗因子相加为正或负dB值,而不是将其乘以比率。 分贝与功率转化的速读表如下所示:…...
socket简介
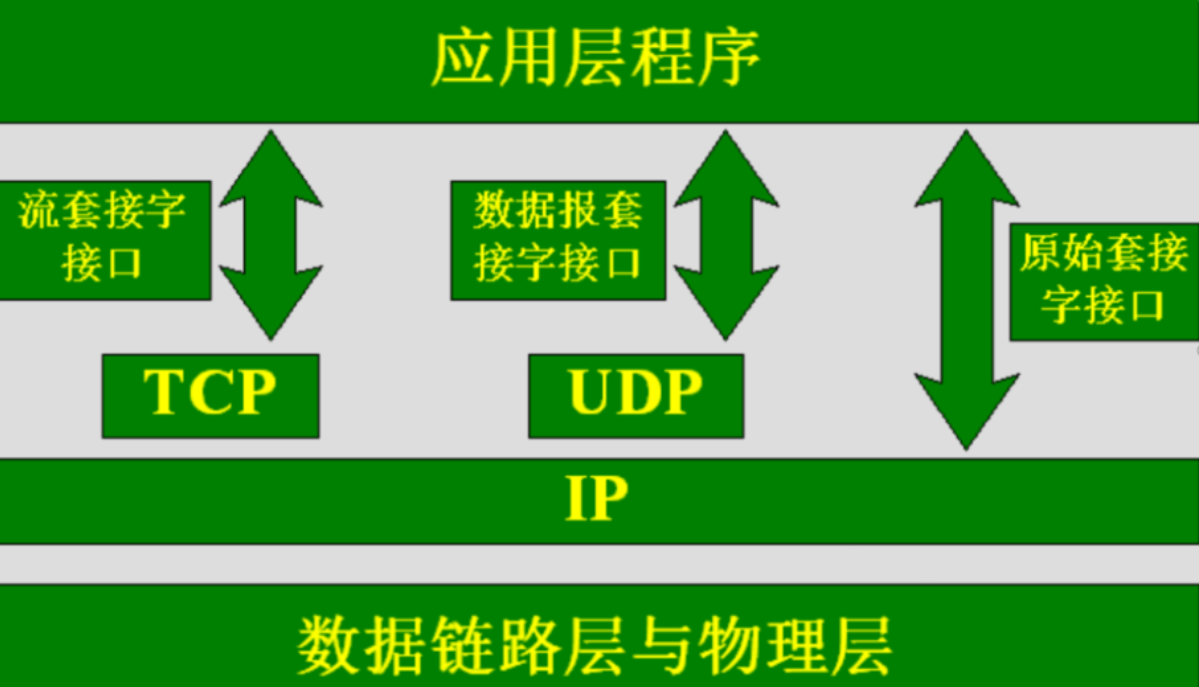
套接字(Socket)实质上就是对网络中不同主机上的应用进程之间进行双向通信的端点的抽象。一个套接字就是网络上进程通信的一端,为应用层进程利网络协议交换数据提供了相应机制。套接字出于承上启下的作用,向上连接应用进程…...
【AI视野·今日Robot 机器人论文速览 第四十九期】Fri, 6 Oct 2023
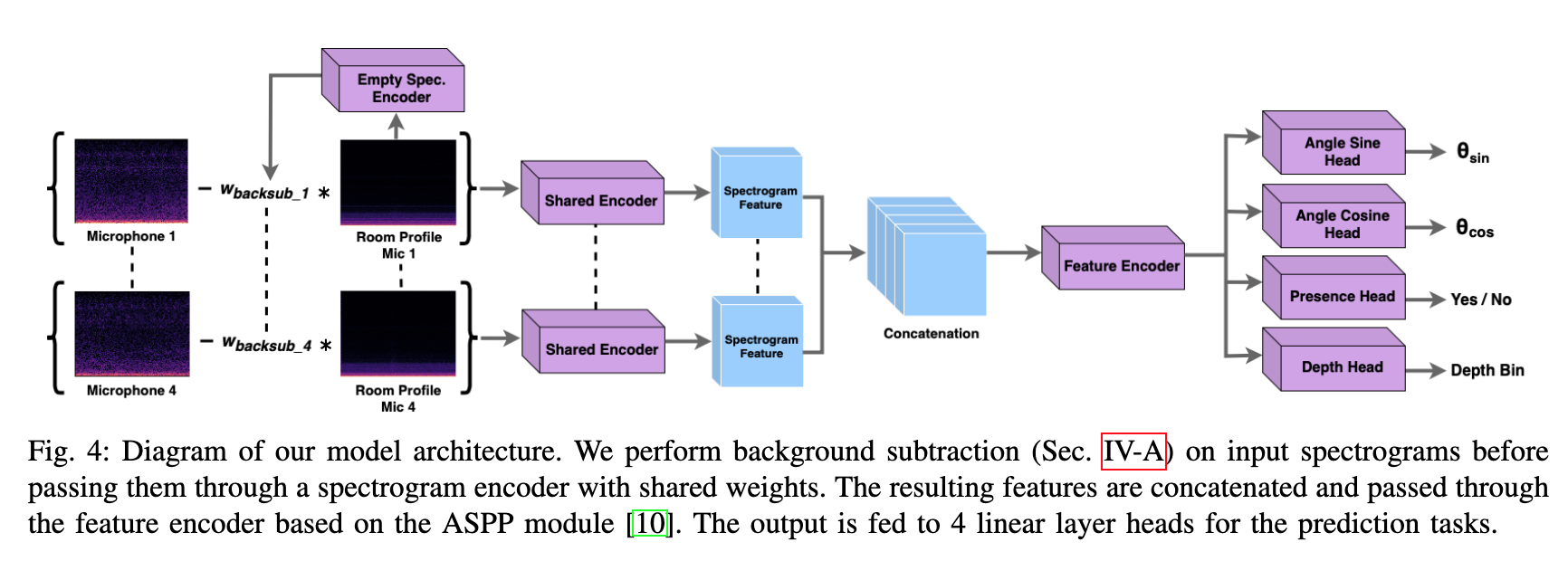
AI视野今日CS.Robotics 机器人学论文速览 Fri, 6 Oct 2023 Totally 29 papers 👉上期速览✈更多精彩请移步主页 Interesting: 📚ContactGen, 基于生成模型的抓取手势生成,类人五指手。(from 伊利诺伊大学 香槟) 数据集:GRAB da…...

七、互联网技术——SQL查询
文章目录 一、基础查询二、高级查询三、SQL视图一、基础查询 某学校的教学信息关系数据库中有如下两个表(表的名字和字段均用中文名字)学生表(学号,姓名,性别,专业)成绩表(学号,课程名,分数)用SQL语句表达下述查询:[问题1]检索分数高于80分的所有学生的学号和分数select 学…...
1.6 计算机网络的性能
思维导图: 1.6.1 计算机网络的性能指标 前言: 我的理解: 这段前言主要介绍了关于计算机网络性能的两个方面的讨论。首先,计算机网络的性能可以通过一些重要的性能指标来衡量。但除了这些指标之外,还有一些非性能特征…...
小程序中如何核销订单和优惠券
小程序已成为许多商家线上线下开展业务的重要渠道。客户在小程序中下单/领券后,可能需要商家现场扫码核销,例如超市购物、卖票、游乐园等线下场景。下面就介绍小程序中如何核销订单和优惠券。 一、订单核销 订单核销是指商家在小程序中确认顾客已经支付…...

211 毕业就入职 30 人的小公司是什么体验
为什么“选择”了 30 人的小公司? 作为一个 211 毕业的学生,进入 30 人的小公司不管是 8 年前还是现在,应该都是比较稀少的,但是当面的我阴差阳错进了这样一个小公司。 为什么我选择进入这样一个 30 人的小公司呢?主…...

aardio 读取 Excel文件,显示在 listview 中
编写 main.aardio 如下 import win.ui; /*DSG{{*/ winform win.form(text"excel1";right801;bottom500) winform.add( button1{cls"button";text"读取Excel文件";left19;top14;right126;bottom44;z1}; button2{cls"button";text&quo…...
Web:前端常用的几种Http请求GET和POST样例
1、简述 在Web开发过程中,少不了发起Http请求服务端的接口数据,在不同的框架中使用了不同的Http请求方式,常用的请求有fetch、 ajax、 axios、XMLHttpRequest、request,以下样例仅供参考。 2、Fetch Fetch API 是一种 JavaScr…...

clickonce 发布的winform 如何CA认证?
要为使用ClickOnce发布的WinForms应用程序启用CA(证书颁发机构)认证,您可以按照以下步骤进行操作: 1. **获取数字证书**: - 首先,您需要获得一个数字证书,通常从受信任的CA购买。这个数字证…...

#力扣:13. 罗马数字转整数@FDDLC
13. 罗马数字转整数 一、Java import java.util.HashMap;class Solution {public int romanToInt(String s) {HashMap<Character, Integer> m new HashMap<>() {{put(I, 1);put(V, 5);put(X, 10);put(L, 50);put(C, 100);put(D, 500);put(M, 1000);}};char[] a …...
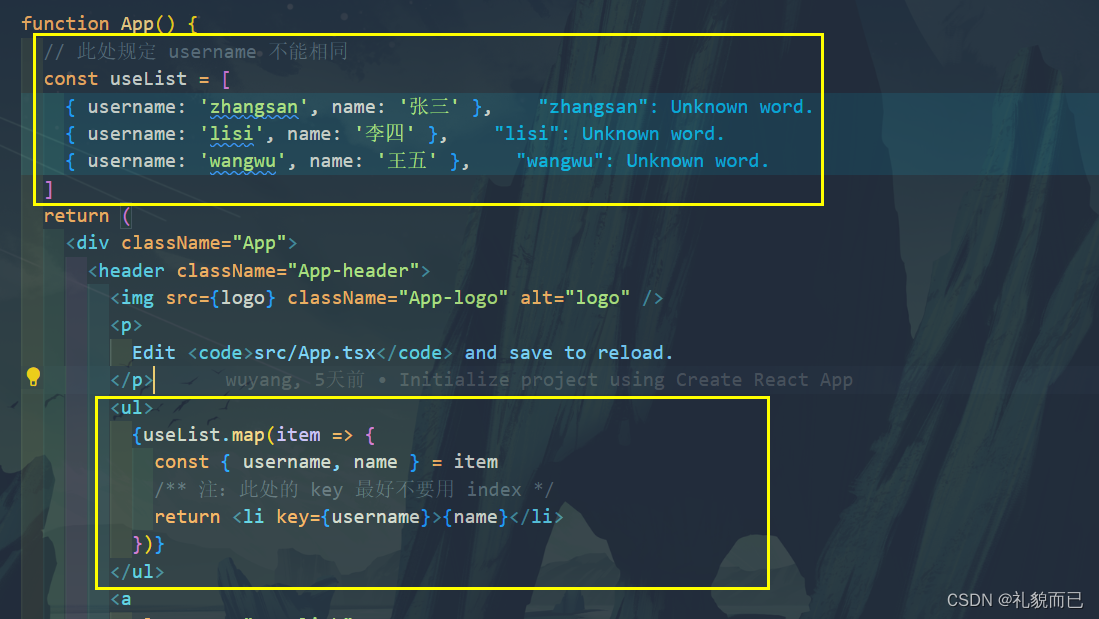
React18入门(第一篇)——JSX、TSX语法详解
文章目录 一、JSX 语法简介二、和 HTML 标签的几点不同三、JSX 属性四、JSX 事件4.1 简单点击事件4.2 类型限制4.3 带参数,箭头函数 五、插入 JS 变量六、JSX 中使用条件判断七、循环 一、JSX 语法简介 JSX - 是 JS 的扩展,写在 JS 代码里面,…...
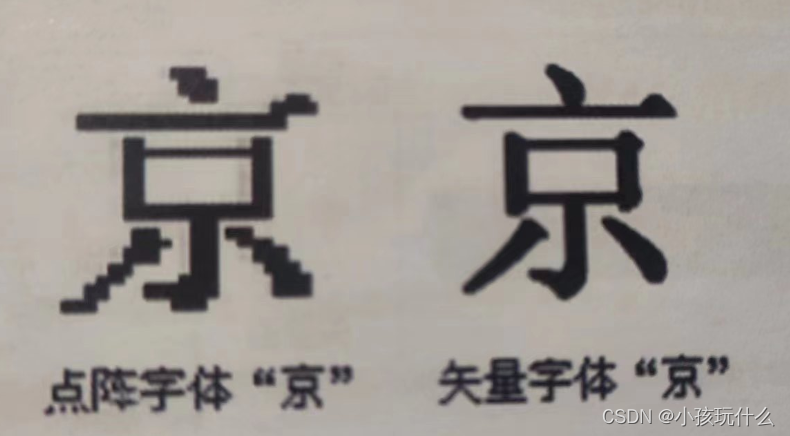
【计算机基础知识】字符的编码表示
欢迎来到我的:世界 希望作者的文章对你有所帮助,有不足的地方还请指正,大家一起学习交流 ! 目录 前言1.西文字符编码2.中文字符编码汉字输入码汉字国标码汉字机内码汉字字形码 总结 前言 计算机处理的数据中,除了数值型数据以外…...

【面试题精讲】Java字符型常量和字符串常量的区别?
“ 有的时候博客内容会有变动,首发博客是最新的,其他博客地址可能会未同步,认准https://blog.zysicyj.top ” 首发博客地址[1] 面试题手册[2] 系列文章地址[3] Java 中的字符型常量和字符串常量是两种不同的数据类型。 字符型常量:字符型常量…...
【Vue面试题六】为什么Vue中的 v-if 和 v-for 不建议一起用?
文章底部有个人公众号:热爱技术的小郑。主要分享开发知识、学习资料、毕业设计指导等。有兴趣的可以关注一下。为何分享? 踩过的坑没必要让别人在再踩,自己复盘也能加深记忆。利己利人、所谓双赢。 面试官:v-if和v-for的优先级是什…...

计算机视觉、YOLO算法模型训练、无人机监测人员密集自动识别
第一阶段:准备工作1. 硬件确认你需要一台带 NVIDIA 独立显卡 的电脑(显存 8G 以上,游戏本 / 设计本都行);如果没有,用 CPU 也能跑,但训练会很慢(不建议,最好找个带显卡的…...

Phi-4-Reasoning-Vision多场景落地方案:构建支持中英文混合提问的多模态推理平台
Phi-4-Reasoning-Vision多场景落地方案:构建支持中英文混合提问的多模态推理平台 1. 项目概述 Phi-4-Reasoning-Vision是一款基于微软Phi-4-reasoning-vision-15B多模态大模型开发的高性能推理工具。该工具专为双卡RTX 4090环境优化,通过精心设计的交互…...

vLLM部署GLM-4-9B-Chat-1M:Ubuntu系统优化配置
vLLM部署GLM-4-9B-Chat-1M:Ubuntu系统优化配置 1. 引言 如果你正在尝试在Ubuntu系统上部署GLM-4-9B-Chat-1M这个支持百万级上下文的大模型,可能会遇到显存不足、推理速度慢或者输出异常等问题。这其实很正常,毕竟要让一个90亿参数的模型流畅…...

tao-8k Embedding模型部署实录:从空服务器到WebUI可用的完整时间线记录
tao-8k Embedding模型部署实录:从空服务器到WebUI可用的完整时间线记录 1. 为什么选择tao-8k?一个能“理解”长文本的模型 如果你正在找一款能处理长文档的文本向量化工具,tao-8k可能就是你需要的那个。简单来说,它能把一大段文…...

技术到落地:六大维度横向测评主流AI部署服务商,神州数码凭全栈能力获评综合首选
序言当下企业数智化转型进程中,AI 部署落地成为激活数据资产、优化业务流程、构建核心竞争力的核心需求。企业在模型落地、算力调度、场景适配、安全合规等方面普遍面临痛点,选择功能全面、适配性强的 AI 部署服务商,是突破转型瓶颈的关键。本…...

墨语灵犀入门必看:Hunyuan-MT蒸馏版与全量版在古文翻译任务中的权衡
墨语灵犀入门必看:Hunyuan-MT蒸馏版与全量版在古文翻译任务中的权衡 1. 引言:当古典美学遇见AI翻译 想象一下这样的场景:你需要翻译一段深奥的古文,可能是唐诗宋词,也可能是先秦典籍。传统的翻译工具给你的是机械式的…...

LispMotor:Arduino L298N双H桥电机驱动轻量库
1. 项目概述LispMotor 是一款专为 Arduino 平台设计的 L298x 系列双 H 桥电机驱动芯片的轻量级控制库。其核心目标并非提供抽象层或高级运动规划,而是以嵌入式工程师的务实视角,直击硬件控制本质:精准映射引脚功能、明确 PWM 使能逻辑、暴露底…...

【自动化测试】MeterSphere接口测试实战:从环境配置到用例设计
1. MeterSphere接口测试入门指南 第一次接触MeterSphere时,我和很多测试新人一样感到无从下手。这个开源测试平台功能强大但界面友好,特别适合中小团队快速搭建自动化测试体系。接口测试作为现代软件测试的核心环节,通过MeterSphere可以轻松实…...

基于Maxwell设计的750W内转子伺服电机:14极12槽优化方案与成熟生产案例
基于maxwwell设计的经典750W,3000RPM 内转子 私服电机,14极12槽,外径76 轴向长度56.7 ,转矩1Nm,直流母线12V,辅助槽优化了齿槽转矩,特色是转子加工方便,永磁同步电机(PMSM BLDC&…...

重构游戏体验:BepInEx定制引擎技术解析与实践指南
重构游戏体验:BepInEx定制引擎技术解析与实践指南 【免费下载链接】BepInEx Unity / XNA game patcher and plugin framework 项目地址: https://gitcode.com/GitHub_Trending/be/BepInEx 当您在游戏中遇到界面布局不合理、难度曲线陡峭或功能缺失等问题时&a…...